芯片stm32f103t8u6
- 格式:pdf
- 大小:1.19 MB
- 文档页数:92
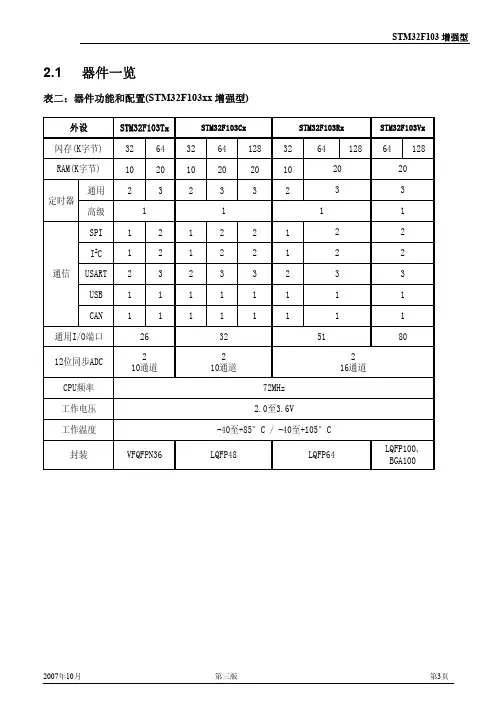
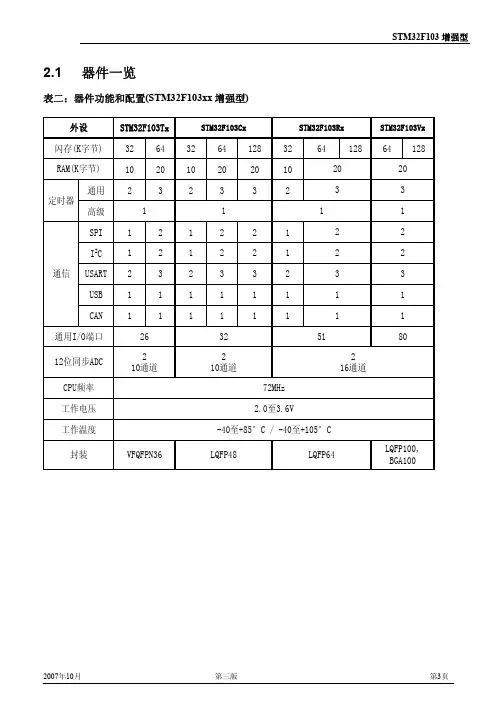
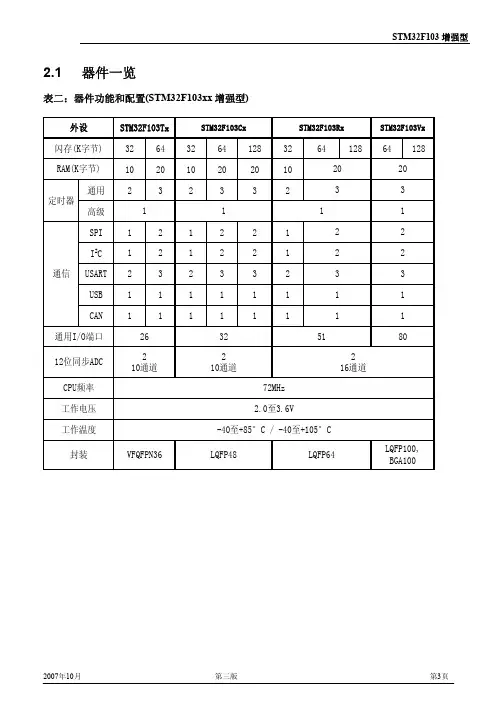
2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
微型仿生扑翼机控制器设计贺雪晨;周超英;汪超【摘要】针对微型仿生扑翼机载重量较小的特点,设计了一款微型扑翼机控制器.文章设计制作了扑翼机控制器的硬件电路,采用STM32F103T8U6作为主处理器,并设有陀螺仪、加速度计和磁力计.在此基础上将传感器的数据进行融合,采用基于四元数互补滤波的姿态解算方法求解出扑翼机的姿态角,以实际姿态角与目标姿态角的差值作为PD控制器的输入,输出量作为舵机控制量,提高扑翼机的飞行稳定性.文中所设计的控制器具有重量轻、尺寸小、与扑翼机契合度高的特点.【期刊名称】《电子设计工程》【年(卷),期】2018(026)016【总页数】5页(P72-75,80)【关键词】微型扑翼机;控制器;互补滤波;姿态解算【作者】贺雪晨;周超英;汪超【作者单位】哈尔滨工业大学深圳研究生院机电工程及自动化学院,广东深圳518055;哈尔滨工业大学深圳研究生院机电工程及自动化学院,广东深圳518055;哈尔滨工业大学深圳研究生院机电工程及自动化学院,广东深圳518055【正文语种】中文【中图分类】TN964.1仿生扑翼飞行器是一种模仿鸟类或昆虫飞行方式的新型仿生飞行器[1]。
与采用传统飞行方式的飞行器相比,仿生扑翼飞行器具有体积小、重量轻、隐蔽性好和灵活性高等优点[2],特别是在小尺度、低雷诺数条件下,相较于其他气动布局的飞行器有着难以比拟的优势,在民用和军事领域均有广泛的应用前景。
因此,近几十年来仿生扑翼飞行器的发展十分迅速,国内外的科研工作者对这一领域的研究也十分重视。
随着扑翼飞行器的小型化,势必要求其控制器做到尽量微型化。
文中设计一款微型控制器,并可解算出扑翼机的姿态角,采用PD控制器控制尾翼舵机,使扑翼机具有良好的飞行稳定性,满足微型扑翼机的控制要求。
1 硬件设计部分1.1 总体方案微型扑翼控制器可利用各传感器的数据解算出扑翼机的当前姿态,并解析接收机信号得到控制量,控制执行机构。
主要由以下几个部分组成:1)微处理器:扑翼控制器的核心单元,用来解算姿态角、解析遥控信号、控制执行机构;2)姿态传感器:包含加速度计、磁力计和陀螺仪,提供姿态解算的原始数据;3)通讯模块:遥控器通过接收机与控制器进行信息通信。

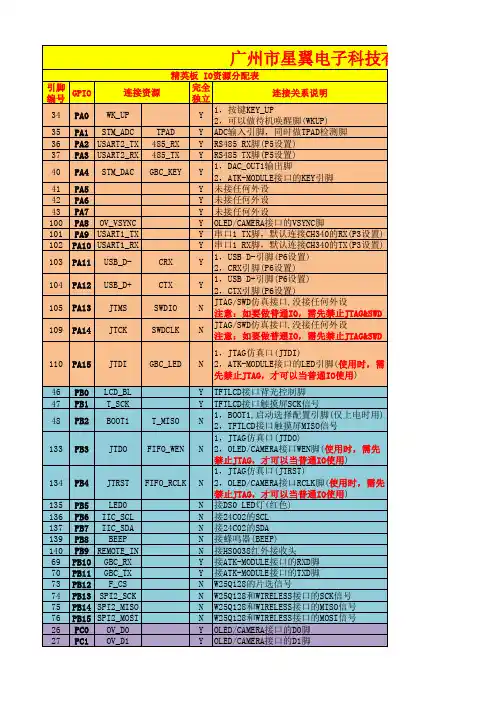
STM32F103V8H6STM32F103VBH6引脚功能定义STM32F103V8H6是意法半导体公司推出的一款32位Cortex-M3内核的微控制器,采用了TQFP64封装,而STM32F103VBH6则采用了LQFP64封装。
两者在引脚功能上有所不同,下面是详细的引脚功能定义:1.GPIO引脚:-PB0:GPIO通用输入输出引脚-PB1:GPIO通用输入输出引脚-PB2:GPIO通用输入输出引脚-...-PB15:GPIO通用输入输出引脚-PC0:GPIO通用输入输出引脚-PC1:GPIO通用输入输出引脚-...-PC15:GPIO通用输入输出引脚-PD0:GPIO通用输入输出引脚-PD1:GPIO通用输入输出引脚-...-PD15:GPIO通用输入输出引脚2.外部中断引脚:-PA0:外部中断引脚-PA1:外部中断引脚-...-PA15:外部中断引脚-PB0:外部中断引脚-PB1:外部中断引脚-...-PB15:外部中断引脚-PC13:外部中断引脚-PC14:外部中断引脚-PC15:外部中断引脚3.ADC引脚:-PA0:ADC通道0输入引脚-PA1:ADC通道1输入引脚-...-PA7:ADC通道7输入引脚-PB0:ADC通道8输入引脚-PB1:ADC通道9输入引脚4.定时器引脚:-PA0:定时器1通道1引脚-PA1:定时器1通道2引脚-...-PA7:定时器1通道4引脚-PB0:定时器3通道1引脚-PB1:定时器3通道2引脚-...-PB15:定时器3通道4引脚5.UART引脚:-PA9:USART1TX引脚-PA10:USART1RX引脚-PA2:USART2TX引脚-PA3:USART2RX引脚-...-PB10:USART3TX引脚-PB11:USART3RX引脚6.SPI引脚:-PA4:SPI1片选引脚-PA5:SPI1时钟引脚-PA6:SPI1主输入引脚-PA7:SPI1主输出引脚-PB12:SPI2片选引脚-PB13:SPI2时钟引脚-PB14:SPI2主输入引脚-PB15:SPI2主输出引脚7.I2C引脚:-PB6:I2C1SCL引脚-PB7:I2C1SDA引脚-PB10:I2C2SCL引脚-PB11:I2C2SDA引脚8.PWM引脚:-PA0:TIM2通道1引脚-PA1:TIM2通道2引脚-...-PA7:TIM3通道2引脚-PB0:TIM3通道3引脚-PB1:TIM3通道4引脚-...-PB13:TIM1通道1引脚-PB14:TIM1通道2引脚-PB15:TIM1通道3引脚B引脚:-PA11:USBD-引脚-PA12:USBD+引脚这些只是引脚功能的一部分,具体的引脚功能还需要根据具体的应用场景来决定。
2.1 器件一览表二:器件功能和配置(STM32F103xx增强型)图一.STM32F103xx增强型模块框图工作温度=-40至+105°C (结温达125°C) AF: I/O口上的其他功能3管脚定义图二.STM32F103xx增强型VFQFPN36管脚图四.STM32F103xx增强型LQFP64管脚表三. 管脚定义表三.管脚定义(续)注:1. I :输入, O:输出, S:电源, HiZ:高阻2. FT:兼容5V3. 其中部分功能仅在部分型号芯片中支持,具体信息请参考表2。
4. PC13,PC14和PC15引脚通过电源开关进行供电,因此这三个引脚作为输出引脚时有以下限制:9作为输出脚时只能工作在2MHz模式下9最大驱动负载为30pF9同一时间,三个引脚中只有一个引脚能作为输出引脚。
5. 仅在内嵌大等于64K Flash的型号中支持此类功能。
6. VFQFPN36封装的2号,3号引脚和LQFP48,LQFP64封装的5号,6号引脚在芯片复位后默认配置为OSC_IN和OSC_OUT功能脚。
软件可以重新设置这两个引脚为PD0和PD1功能脚。
但对于LQFP100封装,由于PD0和PD1为固有的功能脚,因此没有必要再由软件进行设置。
更多详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
PD0和PD1作为输出引脚只能工作在50MHz模式下。
7. 此类复用功能能够由软件配置到其他引脚上,详细信息请参考STM32F10xxx参考手册的复用功能I/O章节和调试设置章节。
4存储器映像图七存储器图5电气特性请参考英文版数据手册6封装参数请参考英文版数据手册7订货代码表四. 订货代码型号闪存存储器K字节SRAM存储器K字节封装STM32F103C6T6 32 10STM32F103C8T6 64 20STM32F103CBT6 128 20LQFP48STM32F103R6T6 32 10STM32F103R8T6 64 20STM32F103RBT6 128 20LQFP64STM32F103V8T6 64 20STM32F103VBT6 128 20LQFP100STM32F103V8H6 64 20STM32F103VBH6 128 20LFBGA100STM32F103T6U6 32 6STM32F103T8U6 64 10VFQFPN367.1 后续的产品系列后续的STM32F103xx增强型系列产品将会有更广泛的型号选择,芯片将会有更大的封装尺寸并内嵌多达512KB的Flash和48KB的SRAM。
STM32F103_外部RAM⽤作运存---IS62WV51216概述SRAM的简介折腾过电脑的朋友都知道,当电脑运⾏⽐较卡的时候,我们可以通过给电脑加装内存条来改善电脑的性能。
那么号称微型计算机的单⽚机能不能像电脑⼀样加装内存条呢?装内存条倒是不⾏,但是我们可以给单⽚机外加和内存条效果⼀样的SRAM来提升单⽚机的性能。
下⾯以STM32F407ZGT6单⽚机来讲解⼀下来扩展外部SRAM。
原理:给STM32芯⽚扩展内存与给PC扩展内存的原理是⼀样的,只是PC上⼀般以内存条的形式扩展,内存条实质是由多个内存颗粒(即SRAM芯⽚)组成的通⽤标准模块,⽽STM32直接与SRAM芯⽚连接。
SRAM,型号IS62WV51216,管脚图如下:IS62WV51216的管脚总的来说⼤致分为:电源线、地线、地址线、数据线、⽚选线、写使能端、读使能端和数据掩码信号线。
从这个图中我们可以看出IS62WV51216有19根地址线和16根数据线,从这些数据中我们可以分析出IS62WV51216的存储⼤⼩为1M,那么这个1M是怎么分析出来的呢?我们得来说说IS62WV51216的存储原理。
⾸先,我们来谈⼀谈⼀般的SRAM的存储原理:sram的存储模型我们可以⽤矩阵来说明:SRAM内部包含的存储阵列,可以把它理解成⼀张表格,数据就填在这张表格上。
和表格查找⼀样,指定⼀个⾏地址和列地址,就可以精确地找到⽬标单元格,这是SRAM芯⽚寻址的基本原理。
这样的每个单元格被称为存储单元,⽽这样的表则被称为存储矩阵。
地址译码器把N 根地址线转换成2的N次⽅根信号线,每根信号线对应⼀⾏或⼀列存储单元,通过地址线找到具体的存储单元,实现寻址。
如果存储阵列⽐较⼤,地址线会分成⾏和列地址,或者⾏、列分时复⽤同⼀地址总线,访问数据寻址时先⽤地址线传输⾏地址再传输列地址。
但是呢?你会发现,这个原理好像不太适⽤于IS62WV51216,为什么呢?其实不然,因为我们使⽤的SRAM⽐较⼩,IS62WV51216没有列地址线。
遥控纸飞机设计方案1.系统总体结构框图系统总体可分为两个部分本体部分和APP控制部分。
设计中我主要负责飞机本体部分的设计。
飞机本体部分又可分为以下几个模块:1、CC2541蓝牙4.0 BLE最小系统;2、直流电机控制模块;3、方向舵控制模块;4、电源管理和锂电池充电模块;图1 系统总体设计框图2.器件选型主控芯片:STM32F103T8U6蓝牙通信芯片:CC2541;2.4-GHz Bluetooth™低能耗和和私有片载系统。
空心杯电机驱动芯片:场效应管,MOSFET N沟道,IRLML2502TRPBF 电磁舵机驱动芯片:场效应管,MOSFET N沟道,IRLML2502TRPBF电源管理芯片:TP4056电磁舵机;方向舵空心杯电机;螺旋桨3.工作过程简介本体的主控芯片,即要完成无线通信,又要实现速度和方向控制。
CC2541 将领先RF 收发器的出色性能和一个业界标准的增强型8051 MCU、系统内可编程闪存存储器、8kB RAM 和很多其它功能强大的特性和外设组合在一起。
正好符合纸飞机本体控制模块的功能要求。
通过控制直流电机的转速来实现速度控制,具体通过CC2541利用PWM进行速度调节。
通过控制电磁舵机的电流方向实现方向舵控制,电磁舵机是是利用电磁感应定律制成的,通过电磁舵机驱动模块控制电流方向,从而控制方向舵的转向。
基于OSAL和BLE协议栈实现蓝牙无线通信的软件程序设计。
4.时间进度安排2014.12~2015.1 :查阅相关的图书及文献资料熟悉课题的研究背景及现状,给出总体设计方案。
2015.1:完成开题报告,制定设计方案及进度规划。
2015.1~2015.2:系统学习CC2541芯片的知识,同时了解OSAL和BLE协议栈的使用。
2015.2~2015.3:设计出具体方案实现方法,采购元器件;并完成本体部分的硬件搭建。
2015.3~2015.4:设计出详细的实现流程,进行初期的模块程序设计。