水箱自动控制系统设计原理图及程序
- 格式:doc
- 大小:405.52 KB
- 文档页数:8
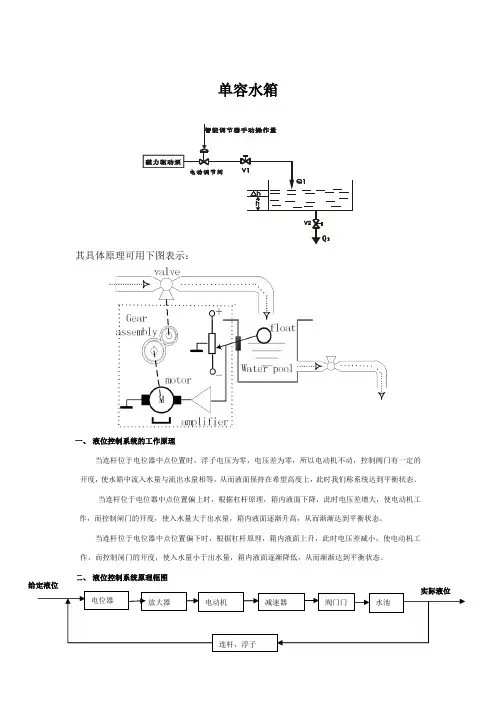
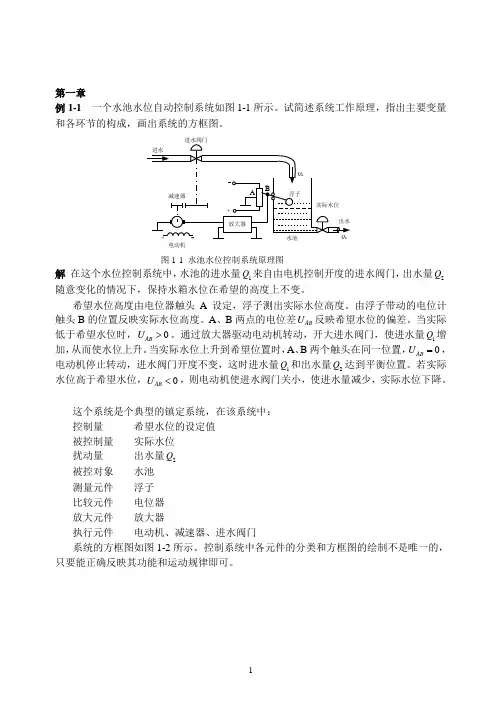
单容水箱其具体原理可用下图表示:一、液位控制系统的工作原理当连杆位于电位器中点位置时,浮子电压为零,电压差为零,所以电动机不动,控制阀门有一定的开度,使水箱中流入水量与流出水量相等,从而液面保持在希望高度上,此时我们称系统达到平衡状态。
当连杆位于电位器中点位置偏上时,根据杠杆原理,箱内液面下降,此时电压差增大,使电动机工作,而控制闸门的开度,使入水量大于出水量,箱内液面逐渐升高,从而渐渐达到平衡状态。
当连杆位于电位器中点位置偏下时,根据杠杆原理,箱内液面上升,此时电压差减小,使电动机工作,而控制闸门的开度,使入水量小于出水量,箱内液面逐渐降低,从而渐渐达到平衡状态。
二、液位控制系统原理框图给定液位实际液位电位器放大器电动机减速器水池阀门门三、 自动控制系统各部分的数学模型的建立以及其传递函数在本控制系统中,我们设Q1为进水量(平衡状态下的增量),Q2为出水量,Ho 为平衡时的水面高度,H 为液面实际高度(平衡状态下的增量),C 为水箱的横截面积。
1)电位计独立工作没什么意义,我们把给定液面体现在电位器上,这就需要电位器和连杆,浮子一起工作,他们是一个整体,实际液面也通过电位器,连杆,浮子与给定电位比较,因为电位器体现的是电压的大小,而我们通过杠杆原理还有浮子,将液面高度与电压的关系联系起来,且两者的关系为正比关系,H (s )为液面高度的拉式变化,U (s )为电压的拉式变化,Go (s )=Ku)(H U(S)S 。
2) 电动机的数学模型设)(t u 为输入的控制电压)(V ,i 电枢电流)(A ,M 为电机产生的主动力矩)(m N •,ω为电机轴的角速度)/(s rad ,L 为电机的电感)(H ,R 为电枢导数的电阻)(Ω,)(t e 电枢转动中产生的反电势)(V ,J 为电机和负载的转动惯量)(2m Kg *根据电路的克希霍夫定理(KVL ):)()(t u t Ri dtdiL=++θ 整理后得:)(2122r rm m e M dt dM T K u K dt d T dt d T T +-=++θωωω式中:R LT =θ称为直流电动机的电气时间常数;m m K K JR T θ=称为直流电动机的机电时间常数;θK K 11=,θK K R K m =2为比例系数。
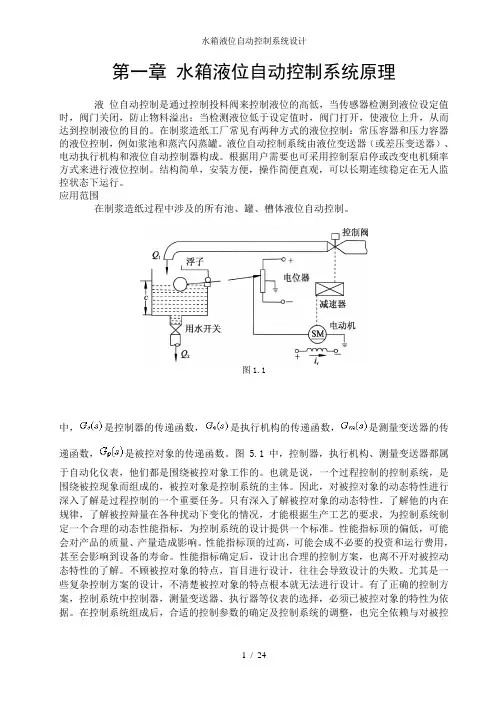
第一章水箱液位自动控制系统原理液位自动控制是通过控制投料阀来控制液位的高低,当传感器检测到液位设定值时,阀门关闭,防止物料溢出;当检测液位低于设定值时,阀门打开,使液位上升,从而达到控制液位的目的。
在制浆造纸工厂常见有两种方式的液位控制:常压容器和压力容器的液位控制,例如浆池和蒸汽闪蒸罐。
液位自动控制系统由液位变送器(或差压变送器)、电动执行机构和液位自动控制器构成。
根据用户需要也可采用控制泵启停或改变电机频率方式来进行液位控制。
结构简单,安装方便,操作简便直观,可以长期连续稳定在无人监控状态下运行。
应用范围在制浆造纸过程中涉及的所有池、罐、槽体液位自动控制。
图1.1中,是控制器的传递函数,是执行机构的传递函数,是测量变送器的传递函数,是被控对象的传递函数。
图5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。
也就是说,一个过程控制的控制系统,是围绕被控现象而组成的,被控对象是控制系统的主体。
因此,对被控对象的动态特性进行深入了解是过程控制的一个重要任务。
只有深入了解被控对象的动态特性,了解他的内在规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制定一个合理的动态性能指标,为控制系统的设计提供一个标准。
性能指标顶的偏低,可能会对产品的质量、产量造成影响。
性能指标顶的过高,可能会成不必要的投资和运行费用,甚至会影响到设备的寿命。
性能指标确定后,设计出合理的控制方案,也离不开对被控动态特性的了解。
不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。
尤其是一些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。
有了正确的控制方案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依据。
在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。
由此可见,在控制工程中,了解被控制的对象是必须首先做好的一项工作。
课程:创新与综合课程设计电子与电气工程学院实践教学环节说明书题目名称水箱水位自动控制装置学院电子与电气工程学院专业电子信息工程班级学号学生姓名起止日期13周周一~14周周五水箱液位控制系统是典型的自动控制系统,在工业应用上可以模拟水塔液位、炉内成分等多种控制对象的自动控制系统。
本次课程设计思路是以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本维持不变。
一、设计题及即要求1、设计并制作一个水箱水位自动控制装置,原理示意图如下:2、基本要求:设计并制作一个水箱水位自动控制装置。
(1)水箱1 的长×宽×高为50 ×40 ×40 cm;水箱2 的长×宽×高为40×30 ×40 cm(相同容积亦可);水箱1 的放在地面,水箱2 放置高度距地0.8-1.2m。
(2)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,误差≤1cm。
(3)水箱 2 中要求的水位高度及上下限可以通过键盘任意设置;(4)实时显示水箱2 中水位的实际高度和水泵、阀门的工作状态。
3、发挥部分:(1)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,误差≤0.3 cm。
(2)由无线远程控制器实现基本要求,无线通讯距离不小于10 米。
远程控制器上能够同步实现超限报警显示。
(3)其他创新。
二、设计思路:以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本维持不变。
原理框图:三、系统结构1、控制模块:本次课程设计采用控制模块是AT89C51单片机。
AT89C51是一种带4K字节FLASH存储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微处理器,俗称单片机。
课题名称:水箱水位控制系统设计专业:电气工程及其自动化学号:姓名:水箱水位控制系统设计摘要本设计主要基于单片机的硬件电路设计,实现一种能够实现水位自动控制、具有自动保护、自动声光报警功能的控制系统。
本控制系统由A/D转换部分、单片机控制部分、数码显示部分、电机驱动部分、电机控制部分等构成。
同时对各个部分进行了详细的论述。
在设计中对水塔水位控制原理进行分析,选用AT89C51单片机作为控制水塔水位的处理芯片,由AT89C51的P1口直接来控制.设计方案采用模块化程序设计方法,结合程序流程图,编写程序代码,最后利用KEIL公司的u Vision3软件及伟福仿真软件进行仿真实验,达到单片机自动控制水塔水位变化的目的.关键词:单片机,水塔水位控制原理,AT89C51,伟福仿真软件目录前言 (1)第1章设计内容 (2)1.1 设计要求 (2)1.2 方案设计 (2)第2章硬件电路设计 (3)2.1 系统框图设计 (3)2.2 系统原理 (4)第3章水塔水位控制系统的硬件电路设计 (5)3.1 水位检测电路 (5)3.2 水位显示电路 (5)3.3电机控制电路 (6)3.4振荡电路和复位电路 (7)3.5声光报警电路 (7)第4章软件程序设计 (8)4.1 系统主程序流程图 (8)4.2编写C程序 (9)第5章硬件制作与调试 (10)结论 (11)附录 (12)仿真总图 (12)源代码 (13)前言水塔是在日常生活和工业应用中经常见到的蓄水装置,在我们的生活中起到了重要的作用,而水基于单片机的水塔水位控制系统使水塔水位自动保持在一定的位置,通过对其水位的控制对外供水,以满足需要。
塔里面的水位控制是一个水塔发挥作用的关键。
该系统使用水位传感器对水塔水位进行检测并将检测到的信号传给单片机来进行处理,通过调整定时器的定时时间来增大或者缩小占空比,并编写程序加以控制,从而实现电机的调速。
最后,使用液晶屏显示当前水位状态以及电动机的转速。
课程设计报告设计题目:水箱液位控制系统班级:自动化0901班学号:姓名:郝万福指导教师:王姝梁岩设计时间:2012年5月7号----5月25号摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应, 饮料、食品加工等多种行业的生产加工过程, 通常需要使用蓄液池, 蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
在这次课程设计中,我们主要是设计一个水箱液位控制系统,涉及到液位的动态控制、控制系统的建模、PID 参数整定、传感器和调节阀等一系列的知识。
通过将电磁流量计和涡轮流量计分别作为主管道和副管道控制系统的调节阀控制水箱液位高度。
首先测取被控液位高度过程的图像,建立了主回路的进水流量和主管道流量、进水流量和水箱(上)液位高度、副回路进水流量和水箱(上)液位、双容水箱的进水流量和水箱(下)液位之间的数学模型,从而加强了对液位控制系统的了解。
然后,通过参数试凑法对PID参数的调试,使上述的模型能快速的达到稳定并且超调量和余差等满足设计要求。
最后通过MATLAB仿真实验,加深了对双容水箱滞后过程以及串级水箱液位过程和前馈控制系统的理解,对工业控制工程中对控制系统设计过程有了一定的认识。
在PID参数整定过程中,我对比例控制,积分控制,微分控制的作用、效果以及调试方法有了一定了解。
通过这次课程设计加深我们对《自动控制原理》、《过程控制系统及仪表》等科目的理解。
关键词:水箱液位控制PID参数整定串级控制前馈控制MATLAB仿真目录1.概述 .................................................................................. 错误!未定义书签。
济南铁道职业技术学院毕业设计题目:水箱液位控制系统设计系别:电气工程系专业:电气自动化班级:0631班****:*******:**目录任务书 (2)摘要 (3)1 绪论 (4)1.1 过程控制的定义 (4)1.2 过程控制的目的 (4)1.3 过程控制的特点 (5)1.4 过程控制的发展与趋势 (5)2 水箱液位控制系统的原理 (6)2.1 人工控制与自动控制 (6)2.2 水箱液位控制系统的原理框图 (7)2.3 水箱液位控制系统的数学模型 (8)3 水箱液位控制系统的组成 (11)3.1 被控制变量的选择 (11)3.2 执行器的选择 (11)3.3 PID控制器的选择 (15)3.4 液位变送器的选择 (17)4 PID控制规律 (18)4.1 比例控制 (18)4.2 积分控制 (21)4.3 微分控制 (21)4.4 比例积分控制 (21)4.5 比例积分微分控制 (22)5 应用实例 (22)5.1 液位控制在厕所中的应用 (22)5.2 液位控制在汽车上的应用 (23)总结 (24)致谢 (25)参考文献 (25)济南铁道职业技术学院毕业设计(论文)任务书摘要在人们生活以及工业生产等诸多领域经常涉及到液位和流量的控制问题, 例如居民生活用水的供应, 饮料、食品加工, 溶液过滤, 化工生产等多种行业的生产加工过程, 通常需要使用蓄液池, 蓄液池中的液位需要维持合适的高度, 既不能太满溢出造成浪费, 也不能过少而无法满足需求。
因此液面高度是工业控制过程中一个重要的参数,特别是在动态的状态下,采用适合的方法对液位进行检测、控制,能收到很好的效果。
PID控制(比例、积分和微分控制)是目前采用最多的控制方法。
本文主要是对一水箱液位控制系统的设计过程,涉及到液位的动态控制、控制系统的建模、PID算法、传感器和调节阀等一系列的知识。
作为单容水箱液位的控制系统,其模型为一阶惯性函数,控制方式采用了PID算法,调节阀为电动调节阀。
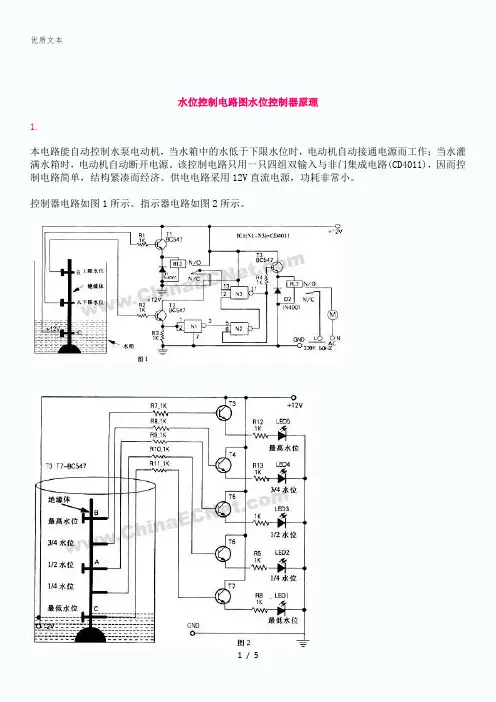
水位控制电路图水位控制器原理1.本电路能自动控制水泵电动机,当水箱中的水低于下限水位时,电动机自动接通电源而工作;当水灌满水箱时,电动机自动断开电源。
该控制电路只用一只四组双输入与非门集成电路(CD4011),因而控制电路简单,结构紧凑而经济。
供电电路采用12V直流电源,功耗非常小。
控制器电路如图1所示。
指示器电路如图2所示。
图1是控制器电路图,在水箱中有两只检测探头"A"和"B",其中"A"是下限水位探头,"B"是上限水位探头,12V直流电源接到探头"C",它是水箱中储存水的最低水位。
下限水位探头"A"连接到晶体管T1(BC547)的基极,其集电极连到12V电源,发射极连到继电器RL1,继电器RL l接入与非门N3第○13脚。
同样,上限水位探头"B"接到晶体管T2的基极(BC547),其集电极连到12V电源,发射极经电阻R3接地,并接入与非门N1第①、②脚,与非门N2的输出第④脚和与非门N3的第○12脚相连,N3第①脚输出端接到N2第⑥脚输入端,并经电阻R4与晶体管T3的基极相连,与晶体管T3发射极相连的继电器RL2用来驱动电动机M。
当水箱向水位在探头A以下,晶体管T1与T2均不导通,N3输出高电平,晶体管T3导通,使继电器RL2有电流通过而动作,因而电动机工作,开始将水抽入水箱。
当水箱的水位在探头A以上、探头B 以下时,水箱中的水给晶体管T1提供了基极电压,使T1导通,继电器RLl得电吸合N3第○13 脚为高电平,由于晶体管T2并无基极电压,而处于截止状态,N1第①、②脚输入为低电平,第③脚输出则为高电平,而N2第⑥脚输入端仍为高电平,因而N2第④脚输出则为低电平,最终N3第11脚输出为高电平,电动机继续将水抽入水箱。
当水箱的水位超过上限水位B时,晶体管T1仍得到基极电压,继电器RLl吸合。

单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序
单片机水箱水位控制系统+硬件框图+流程图+电路图+汇编源程序给水泵电机主控回路图如下:三本系统8051单片机控制部分结构本系统采用8051单片机,引脚具体控制如下:P1口和P3口为输入输出检测信号和控制信号。
下面是8051芯片引脚具体分配:P1.0:水位低低输入信号。
(低0 高1)P1.1:水位低输入信号。
(低0 高1)P1.2:水位高输入信号。
(高1,低0)P1.3:手动与自动转换输入信号。
(手动1,自动0)P1.4:M1起动KM1控制输出信号。
(手动1,自动0)P1.5:M2起动KM1控制输出信号。
(手动1,自动0)P1.6:M1开关状态输入信号。
(开0,关1)P1.7:M2开关状态输入信号。
(开0,关1)P3.0:水位低低报警输出信号。
论文网
P3.1:水位低报警输出信号。
P3.2:水位高报警输出信号。
P3.4:手动起动M1输入信号,低电频有效动作。
P3.5:手动起动M2输入信号,低电频有效动作。
P3.6:手动停M1输入信号,低电频有效动作。
P3.7:手动停M2输入信号,低电频有效动作。
上一页[1] [2] [3] [4]。
水箱液位控制系统水箱液位控制系统的原理:水箱液位控制系统是一种自动控制系统,其目的是通过控制进水量和排水量,使水箱中的液位保持在一定的范围内。
该系统主要由水箱、电动机、进水阀门、浮子连杆等配件构成。
当水箱液位下降时,浮子连杆会向下移动,通过传感器将信号发送给控制器,控制器将信号转化为控制信号,控制进水阀门的开度,从而增加进水量,使液位回升到设定值。
当水箱液位上升时,浮子连杆会向上移动,控制器会减小进水量或打开排水阀门,从而使液位回落到设定值。
控制系统元件的选择:在设计水箱液位控制系统时,需要选择合适的控制元件,如传感器、控制器、执行器等。
传感器需要选择灵敏度高、精度高的液位传感器,以确保液位检测的准确性;控制器需要具有良好的控制性能和稳定性,以确保系统的稳定性和可靠性;执行器需要选择响应速度快、控制精度高的电动阀门或电动泵等,以确保系统的响应速度和控制精度。
控制系统的参数确定:在设计水箱液位控制系统时,需要确定一些重要的参数,如控制器的比例、积分、微分系数,以及进水阀门的开度和排水阀门的开度等。
这些参数的确定需要结合实际情况和系统响应特性,通过试验和仿真等手段进行优化调整,以确保系统的性能和稳定性。
控制系统的仿真结果:通过Matlab/Simulink对水箱液位控制系统进行仿真,可以得到系统的响应曲线和稳态误差等性能指标。
通过仿真结果可以发现系统的稳态误差较小,响应速度较快,控制精度较高,符合设计要求。
设计总结:本文设计了一个水箱液位控制系统,并对其进行了仿真分析。
通过设计和仿真可以发现,该系统具有操作简便、可靠性好、运行成本低、可扩展行强等特点,能够满足实际应用需求。
同时,本文还提出了一些优化建议,如进一步优化控制器参数、加强系统的故障检测和容错能力等,以进一步提高系统的性能和稳定性。
参考文献:暂无。
在工业生产和日常生活中,经常需要对中的液位进行自动控制,例如自动控制水箱、水池、水槽、锅炉等中的蓄水量,以及生活中抽水马桶的自动补水控制、自动电热水器和电开水机的自动进水控制等。
题目:基于单片机的水箱水位自动控制系统英文题目:The water tank level automatic control system based on microcontroller二零一二年月日摘要大型水箱是很多公司生产过程中必不可少的部件,它的性能和工作质量的优良不仅仅对生产有着巨大的影响,而且也关系着生产的安全。
在过去,大量的对水箱操作是由相应的人员进行操作的,这样的人工方式带来了很大的弊端,比如水位的控制,时刻监控水箱的环境,夜间的监控等等,操作员稍有疏忽,或者简易的监则器件损坏,将带来无法弥补的损失,更严重的会危机到生产人员的人身安全等。
所以,对水箱控制,如果能够使用精密的而且完全会严格按照生产规定运行的自动化系统,可以最大限度的避免事故的几率,同时也能节省资源并能有效提高生产的效率。
本单片机系统设计的目的是应用单片机控制技术,以单片机为核心控制水箱的水位,并实现了报警和水位显示、自动控制等功能。
该系统操作方便、性能良好,比较符合生产生活用水系统控制的需要。
关键词:单片机;水箱水位;自动控制;水位显示;报警ABSTRACTLarge water tanks are a lot of companies essential to the production process of parts, its performance and the quality of work not only on production of the fine has enormous influence, but also the safety of production. In the past, many of the tanks are operated by the staff to operate, so that artificial means a lot of drawbacks, such as the water level control, water tanks at all times to monitor the environment, and so on the night of monitoring, the operator slightly negligence, or damage to the Summary of the monitoring device will bring irreparable damage will be even more serious crisis in production, such as the personal safety of staff. Therefore, control of water tanks, if the use of sophisticated and can totally be run in strict accordance with the provisions of the automated production system that can maximize the chances of avoiding accidents, but also save resources and can effectively improve the efficiency of production.The purpose of single-chip system design is the application of single-chip control technology, to 8051 as the core to control the water level in water tanks, and of the alarm and manual, automatic switching function. The system is easy to operate, good performance, more in line with the power to control the production of the necessary water system.KEY WORDS: Single chip microcomputer ;V oluntarily control the Lever level ;Relay;Auto-protecting;Alarm目录摘要 (I)ABSTRACT ............................................................................................. 错误!未定义书签。
自动化系统集成与调试实训报告自动化系统集成与调试实训报告本课程为自动化集成与调试,实际上就是让我们用PLC控制水箱打水.由于实训前接触过类似的程序与硬件,所以做起来相对简单。
第一周实训,一开始长江老师让我们重新复习之前所学。
我们组并没有急着开始做项目,而是认真的检查电源,传感器,变频器等硬件是否完好。
然后再由徐同学与李同学完成硬件的接线,张组长则与吴同学完成程序的编写。
一、接线图:S7—300模拟量输入输出模块、S7-300数字量输入输出模块、传感器以及变频器的接线(注意:用灰色细线将变频器3号端子接PLC数字量输出端子,变频器7号端子接PLC的M端,变频器9号端子接PLC模拟量输出端子,变频器10号端子接PLC模拟量COM端;用红、蓝、黑三种粗线将水箱抽水泵和变频器的U、V、W、PE端子对应接好)。
二、项目要求:我们所做的项目如下(一)项目一、PLC控制变频器打水本项目总任务是通过PLC、变频器控制水泵打水.任务一、G110变频器参数设置及快速调试任务二、PLC控制变频器打水的组态、编程及仿真任务三、S7-300模拟量输出模块与接线任务四、现场实际调试与运行(二)项目二、水箱液位的测量本项目总任务是通过PLC、变频器控制实现水箱液位的测量任务一、水箱液位测量的组态、编程及仿真任务二、现场接线任务三、现场实际调试与运行(三)项目三、水箱液位两位式调节本项目总任务是通过PLC、变频器、传感器监测水位控制水泵打水,当测量值大于高限值,变频器停止,水泵停止打水;当测量值小于低限值,变频器启动,水泵打水,当测量值在高限值与低限值之间时,变频器保持原状态。
任务一、水箱液位两位式调节的组态、编程及仿真运行任务二、水箱液位两位式调节现场实际调试与运行(四)项目四、水箱液位PID控制总任务是调用PID模块使变频器的频率自动调节任务一、了解PID调节的原理任务二、水箱液位PID控制的组态、编程及仿真任务三、水箱液位PID控制的现场接线任务四、箱液位PID控制的现场调试与运行(五)项目五水箱液位的WinCC监控通过WinCC的新建变量与PLC S7—300的程序地址的连接,达到用WinCC监控水箱水位的目的。
自动控制原理课程设计水箱流量控制系统【优秀】(文档可以直接使用,也可根据实际需要修订后使用,可编辑推荐下载)自动控制原理课程设计题目:水箱流量控制系统校正装置设计系别专业班级学号学生姓名指导教师提交日期一、设计目的首先,通过对水箱流量控制系统的分析,加强对水箱流量控制系统的认识,并掌握超前校正网络设计的方法。
其次,通过课程设计,培养分析问题解决问题的能力。
此外,使用Matlab软件进行系统仿真,从而进一步掌握Matlab的使用。
二、设计任务及要求初始条件:已知单位反馈水箱流量控制系统,系统的开环传递函数为要求:试用Bode图设计法对系统进行超前串联校正设计,使系统满足:(1)系统在单位斜坡信号作用下,系统的稳态误差(2)系统校正后,系统的相角裕量三、设计任务分析虽然在频域内进行系统设计,是一种间接的设计方法,因为设计结果满足的是一些频域指标,而不是时域指标。
然而,在频域内设计又是一种简便的方法,在Bode图上虽不能严格定量地给出系统的动态特性,但却能方便的根据频域指标确定校正装置的参数,特别是对以校正系统的高频特性有要求时,采用频域法校正较其他方法更为方便。
一般来说,开环频率特性的低频段表征了闭环系统的稳态性能;开环频率特性的中频段表征了闭环系统的动态性能;开环频率特性的高频段表征了闭环系统的复杂性和噪音抑制功能。
因此,用频域法设计控制系统的实质,就是在系统中加入频率特性形状合适的校正装置,使开环系统的频率形状变成所期望的形状:低频段要有一定的高度和斜率;中频段的斜率最好为,且具有足够的宽度;高频段采用迅速衰减的特性,以抑制不必要的高频干扰。
四、设计内容4.1根据所要求的稳态性能指标,确定系统满足稳态性能要求的开环增益由要求(1):系统在单位斜坡信号作用下,系统的稳态误差。
得,取。
4.2绘制k=1000值下的系统的Bode图,并求出系统的相角裕量待校正系统的开环传递函数作出时未校正系统的Bode图,其渐近线如图1所示60 -20dB/dec300 -40dB/dec-30-60 -60dB/dec图1:未校正系统的Bode图计算未校正系统的开环剪切频率相应的相角裕量为相角裕度小的原因,是因为待校正系统的对数幅频特性中频区的斜率是,系统的动态特性会有严重的振荡,需要校正装置校正。
课程:创新与综合课程设计
电子与电气工程学院实践教学环节说明书
题目名称水箱水位自动控制装置
学院电子与电气工程学院
专业电子信息工程
班级
学号
学生姓名
起止日期13周周一~14周周五
水箱液位控制系统是典型的自动控制系统,在工业应用上可以模拟水塔液位、炉内成分等多种控制对象的自动控制系统。
本次课程设计思路是以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本维持不变。
一、设计题及即要求
1、设计并制作一个水箱水位自动控制装置,原理示意图如下:
2、基本要求:设计并制作一个水箱水位自动控制装置。
(1)水箱1 的长×宽×高为50 ×40 ×40 cm;水箱2 的长
×宽×高为40×30 ×
40 cm(相同容积亦可);水箱1 的放在地面,水箱2 放置高度距地0.8-1.2m。
(2)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,
误差≤1cm。
(3)水箱 2 中要求的水位高度及上下限可以通过键盘任意设置;
(4)实时显示水箱2 中水位的实际高度和水泵、阀门的工作状态。
3、发挥部分:
(1)在出水龙头各种开度状态下装置能够自动控制水箱 2 中水位的高度不变,
误差≤0.3 cm。
(2)由无线远程控制器实现基本要求,无线通讯距离不小于10 米。
远程控
制器上能够同步实现超限报警显示。
(3)其他创新。
二、设计思路:
以单片机为控制中心,对水位传感器、电机驱动模块、按键及显示进行控制。
通过按键设置水位传感器的位置,在水龙头及阀门的各种开度下,通过控制水泵工作或不工作来维持水箱二的液面高度基本
维持不变。
原理框图:
三、系统结构
1、控制模块:本次课程设计采用控制模块是AT89C51单片机。
AT89C51是一种带4K字节FLASH存储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微处理器,俗称单片机。
AT89C2051是一种带2K字节闪存可编程可擦除只读存储器的单片机。
单片机的可擦除只读存储器可以反复擦除1000次。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL 的AT89C51是一种高效微控制器,AT89C2051是它的一种精简版
本。
AT89C51单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
2、水位测量仪
由于各种原因,本设计没有用水位测量仪。
而是用廉价的土壤湿度检测仪代替。
在精度方面,本次课程设计做的不是很好,因为湿度测量仪不能设计对液面的精确控制。
但是不影响本次课程设计的最终结果。
3、电机驱动模块
电机驱动模块电路图:
恒压恒流桥式2A驱动芯片L298N
L298是SGS公司的产品,比较常见的是15脚Multiwatt封装的L298N,内部同样包含4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7 V 电压。
4脚VS接电源电压,VS电压范围VIH为+2.5~46 V。
输出电流可达2.5 A,可驱动电感性负载。
1脚和15脚下管的发射极分别单独引出以便接入电流采样电阻,形成电流传感信号。
L298可驱动2个电动机,OUT1,OUT2和OUT3,OUT4之间可分别接电动机,本实验装置我们选用驱动一台电动机。
5,7,10,12脚接输入控制电平,控制电机的正反转。
EnA,EnB接控制使能端,控制电机的停转。
LM298N 功能表格:
4、程序设计
#include<reg52.h>
#define uint unsigned int
uint x,y,z;
sbit d1=P1^0;
sbit d2=P1^1;
sbit d3=P1^3;
void main()
{
d1=1; //初始化为高电平;
d2=0; //初始化为低电平;
while(1)
{
if(d1==0) //d1为低电平,检测到水,水泵开始抽水;
{
d2=0; //d2=0,d3=1说明在抽水;
d3=1;
}
else //d1,d2为相同电平,水泵不工作
{
d2=1;
d3=1;
}
}
}
四、设计体会
本次课程设计,我们做的是水箱水位自动控制装置。
本来想做的是用PID准确的控制液位的位置,但是在原件方面准备的不够充分。
只能做到大致的控制水箱二的液面高度不变,不能精确的控制液面的高度。
在老师的帮助下,通过自己的努力,本次课程设计圆满的结束了。