第二章 编程坐标系与数值计算
- 格式:ppt
- 大小:626.00 KB
- 文档页数:22

解释说明编程坐标系编程坐标系是一种用来描述和定位图形或对象在二维或三维空间中位置的系统。
它是计算机图形学和计算机编程中非常重要的概念,对于开发各种应用程序和游戏有着广泛的应用。
编程坐标系能够帮助开发者准确地控制和操作图形或对象的位置、旋转、缩放等属性,从而实现各种视觉效果和交互功能。
在二维空间中,编程坐标系一般采用笛卡尔坐标系,也就是直角坐标系。
它由两个坐标轴组成,通常为水平的x轴和垂直的y轴。
原点(0,0)表示坐标系的起始位置,x轴表示水平方向的位置,y轴表示垂直方向的位置。
通过指定坐标点的x和y值,开发者可以确定图形或对象在平面上的位置。
在三维空间中,编程坐标系一般使用笛卡尔坐标系的扩展,也就是三维笛卡尔坐标系。
它由三个坐标轴组成,分别为水平的x轴、垂直的y轴和垂直于平面的z轴。
原点(0,0,0)表示坐标系的起始位置,x、y和z轴分别表示三个方向上的位置。
通过指定坐标点的x、y和z 值,开发者可以确定图形或对象在空间中的位置。
在编程中,开发者可以使用不同的编程语言和工具来操作编程坐标系。
例如,在网页开发中,可以使用HTML5的Canvas元素和JavaScript来操作二维坐标系。
可以使用CSS3的3D转换和变换属性来操作三维坐标系。
还可以使用计算机图形学库如OpenGL或Unity来进行更复杂的图形操作和计算。
同时,为了方便开发者的使用,编程坐标系通常还提供了一些函数和方法来操作图形或对象的位置和属性。
比如,在二维坐标系中,可以使用translate()函数来移动图形的位置,rotate()函数来旋转图形,scale()函数来缩放图形的大小。
在三维坐标系中,也有类似的函数和方法供开发者使用。
总之,编程坐标系是计算机图形学和计算机编程中的基础概念,它可以帮助开发者准确地操作图形或对象的位置和属性,实现各种视觉效果和交互功能。
掌握编程坐标系的概念和使用方法,对于开发者来说是非常有指导意义的,可以帮助他们更好地实现自己的编程目标。
第二章数控编程基础2.1 数控编程的方法数控加工程序的编制方法主要有手工编程和计算机自动编程。
手工编程主要由人工来完成数控编程中各个阶段的工作。
一般对几何形状不太复杂的零件,所需的加工程序不长,计算比较简单,用手工编程比较合适。
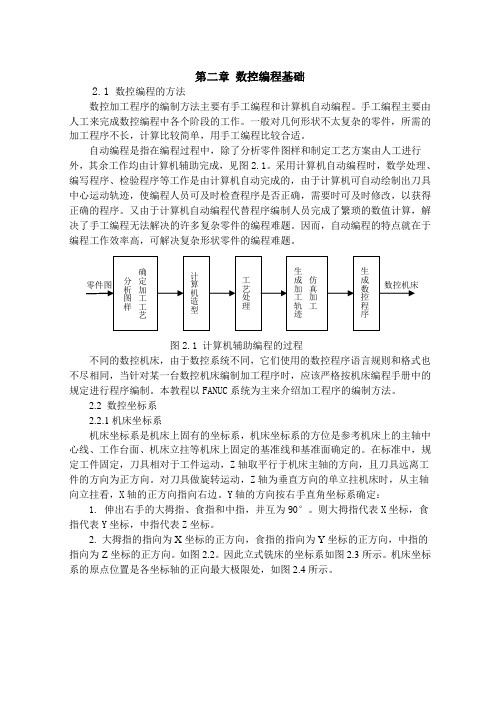
自动编程是指在编程过程中,除了分析零件图样和制定工艺方案由人工进行外,其余工作均由计算机辅助完成,见图2.1。
采用计算机自动编程时,数学处理、编写程序、检验程序等工作是由计算机自动完成的,由于计算机可自动绘制出刀具中心运动轨迹,使编程人员可及时检查程序是否正确,需要时可及时修改,以获得正确的程序。
又由于计算机自动编程代替程序编制人员完成了繁琐的数值计算,解决了手工编程无法解决的许多复杂零件的编程难题。
因而,自动编程的特点就在于编程工作效率高,可解决复杂形状零件的编程难题。
图2.1 计算机辅助编程的过程不同的数控机床,由于数控系统不同,它们使用的数控程序语言规则和格式也不尽相同,当针对某一台数控机床编制加工程序时,应该严格按机床编程手册中的规定进行程序编制。
本教程以FANUC系统为主来介绍加工程序的编制方法。
2.2 数控坐标系2.2.1机床坐标系机床坐标系是机床上固有的坐标系,机床坐标系的方位是参考机床上的主轴中心线、工作台面、机床立拄等机床上固定的基准线和基准面确定的。
在标准中,规定工件固定,刀具相对于工件运动,Z轴取平行于机床主轴的方向,且刀具远离工件的方向为正方向。
对刀具做旋转运动,Z轴为垂直方向的单立拄机床时,从主轴向立拄看,X轴的正方向指向右边。
Y轴的方向按右手直角坐标系确定:1. 伸出右手的大拇指、食指和中指,并互为90°。
则大拇指代表X坐标,食指代表Y坐标,中指代表Z坐标。
2. 大拇指的指向为X坐标的正方向,食指的指向为Y坐标的正方向,中指的指向为Z坐标的正方向。
如图2.2。
因此立式铣床的坐标系如图2.3所示。
机床坐标系的原点位置是各坐标轴的正向最大极限处,如图2.4所示。

MATLAB数值计算教程第一章:MATLAB入门1.1 MATLAB简介MATLAB(Matrix Laboratory)是一款强大的数值计算软件,广泛用于工程、科学和金融领域。
它的特点是简单易用、高效快速,并且拥有丰富的工具箱和函数库。
1.2 MATLAB环境搭建要使用MATLAB进行数值计算,首先需要安装MATLAB软件,并进行必要的配置。
通过官方网站下载安装程序,根据提示进行安装即可。
安装完成后,打开MATLAB环境,即可开始使用。
1.3 MATLAB基本操作在MATLAB环境中,可以通过命令行窗口输入和执行命令,也可以使用脚本文件进行批量处理。
常用的基本操作包括变量赋值、算术运算、函数调用等。
例如,使用"="符号赋值变量,使用"+"、"-"、"*"、"/"等符号进行算术运算。
第二章:向量和矩阵操作2.1 向量操作在MATLAB中,向量是一种特殊的矩阵,可以通过一组有序的元素构成。
向量可以进行基本的算术运算,如加法、减法、乘法、除法,还可以进行向量的点积、叉积等操作。
可以使用内置函数和运算符来实现。
2.2 矩阵操作矩阵是MATLAB中最常用的数据结构之一,使用矩阵可以进行多个向量的组合和运算。
可以进行矩阵的加法、减法、乘法、除法等操作,也可以进行矩阵的转置、求逆、求特征值等操作。
MATLAB提供了大量的函数和工具箱来支持矩阵的操作。
第三章:数值计算方法3.1 数值积分数值积分是一种用数值方法计算定积分的方法。
在MATLAB 中,可以使用内置函数来进行数值积分,如trapz函数和quad函数。
也可以使用Simpson法则、复合辛普森法等方法实现数值积分。
3.2 数值微分数值微分是一种用数值方法计算导数的方法。
在MATLAB中,可以使用内置函数进行数值微分,如diff函数和gradient函数。


数控编程数字知识点总结一、数学知识点1. 数学坐标系:数控编程中常用的坐标系包括直角坐标系和极坐标系。
直角坐标系是以x、y、z轴作为基准,极坐标系是以半径和角度作为坐标系。
掌握坐标系的转换和运算是进行数控编程的基础。
2. 几何知识:数控编程需要对机械加工中的图形和尺寸有所了解,掌握几何学的知识可以帮助程序员有效地进行加工路径的规划和分析。
3. 数值计算:在数控编程中需要进行各种数值计算,如坐标位置计算、插补算法等。
熟练掌握数值计算方法对于编写高效的数控程序至关重要。
4. 三角函数:在数控编程中经常用到三角函数,如正弦、余弦、正切等,在进行坐标变换和路径规划时会用到这些数学函数。
5. 插值算法:数控编程中的插值算法包括线性插补、圆弧插补、螺旋线插补等,这些算法需要依靠数学计算来实现,并且对于不同的机床和加工要求有不同的应用方法。
二、机床加工知识点1. 机床坐标系:不同类型的机床有不同的坐标系设定,掌握各种类型机床的坐标系设定对于正确编写数控程序是至关重要的。
2. 加工工艺参数:数控编程需要了解工件材料的特性、工艺要求、刀具选择等加工参数,这些知识对于编写合理的加工程序起着至关重要的作用。
3. 刀具路径规划:在数控编程中需要根据刀具的形状、工艺要求等规划刀具的路径,这需要对机床加工特性有一定的了解。
4. 数控程序格式:数控编程需要将编写好的程序转化成机床可执行的代码格式,了解常见数控程序格式对于正确编写程序是必不可少的。
5. 运动控制原理:在数控编程中需要了解机床的运动控制原理,包括各轴的运动控制方式、坐标系转换等。
三、数控编程语言知识点1. G代码和M代码:G代码是数控编程中描述加工路径的命令代码,M代码是描述机床辅助功能的命令代码,了解G代码和M代码的语法和应用是进行数控编程的基础。
2. 宏变量和系统变量:数控编程中常用的宏变量和系统变量可以帮助程序员在编程过程中自动生成代码,提高编程效率。
3. 子程序和循环:在数控编程中常常需要编写子程序和循环,对于复杂的加工过程,采用子程序和循环可以简化程序编写和管理。
实际应用中的坐标系及其相关计算在数学中,坐标系是一个重要的概念,它在实际应用中有着广泛的应用。
无论是在几何学、物理学、经济学还是其他学科中,我们都可以看到坐标系的身影。
通过坐标系,我们可以准确地描述和计算各种实际问题,使得我们能够更好地理解和解决这些问题。
一、直角坐标系直角坐标系是最常见的坐标系之一。
它由两条相互垂直的坐标轴组成,通常称为x轴和y轴。
在直角坐标系中,我们可以用有序数对(x, y)来表示一个点的位置。
其中,x代表点在x轴上的位置,y代表点在y轴上的位置。
例如,点A的坐标为(2, 3),表示它在x轴上的位置是2,在y轴上的位置是3。
在实际应用中,直角坐标系可以帮助我们解决很多问题。
例如,在几何学中,我们可以通过直角坐标系计算两点之间的距离。
假设有两个点A(2, 3)和B(5, 7),我们可以使用勾股定理来计算它们之间的距离。
根据勾股定理,我们有:AB² = (5-2)² + (7-3)²= 3² + 4²= 9 + 16= 25因此,AB的距离等于5。
二、极坐标系除了直角坐标系,还有一种常用的坐标系是极坐标系。
极坐标系由一个原点O和一个极轴组成,极轴通常与x轴重合。
在极坐标系中,我们用有序数对(r, θ)来表示一个点的位置。
其中,r代表点到原点O的距离,θ代表点与极轴正方向的夹角。
极坐标系在实际应用中也有很多用途。
例如,在物理学中,我们可以使用极坐标系描述一个物体的运动轨迹。
假设一个物体以恒定的速度沿着一个圆形轨道运动,我们可以使用极坐标系来描述它的位置。
设物体到原点O的距离为r,物体与极轴正方向的夹角为θ。
根据物体的运动规律,我们可以得到它的位置关系:r = r₀θ = ωt其中,r₀为物体的初始距离,ω为物体的角速度,t为时间。
通过这些关系,我们可以计算出物体在任意时刻的位置。
三、三维坐标系除了二维的直角坐标系和极坐标系,还有一种常用的坐标系是三维坐标系。