计算机图形学 答案
- 格式:docx
- 大小:225.85 KB
- 文档页数:9
第一章绪论概念:计算机图形学、图形、图像、点阵法、参数法、图形的几何要素、非几何要素、数字图像处理;计算机图形学和计算机视觉的概念及三者之间的关系;计算机图形系统的功能、计算机图形系统的总体结构。
第二章图形设备图形输入设备:有哪些。
图形显示设备:CRT的结构、原理和工作方式。
彩色CRT:结构、原理。
随机扫描和光栅扫描的图形显示器的结构和工作原理。
图形显示子系统:分辨率、像素与帧缓存、颜色查找表等基本概念,分辨率的计算第三章交互式技术什么是输入模式的问题,有哪几种输入模式。
第四章图形的表示与数据结构自学,建议至少阅读一遍第五章基本图形生成算法概念:点阵字符和矢量字符;直线和圆的扫描转换算法;多边形的扫描转换:有效边表算法;区域填充:4/8连通的边界/泛填充算法;内外测试:奇偶规则,非零环绕数规则;反走样:反走样和走样的概念,过取样和区域取样。
5.1.2 中点 Bresenham 算法(P109)5.1.2 改进 Bresenham 算法(P112)习题解答习题5(P144)5.3 试用中点Bresenham算法画直线段的原理推导斜率为负且大于1的直线段绘制过程(要求写清原理、误差函数、递推公式及最终画图过程)。
(P111)解: k<=-1 |△y|/|△x|>=1 y为最大位移方向故有构造判别式:推导d各种情况的方法(设理想直线与y=yi+1的交点为Q):所以有: y Q-kx Q-b=0 且y M=y Qd=f(x M-kx M-b-(y Q-kx Q-b)=k(x Q-x M)所以,当k<0,d>0时,M点在Q点右侧(Q在M左),取左点 P l(x i-1,y i+1)。
d<0时,M点在Q点左侧(Q在M右),取右点 Pr(x i,y i+1)。
d=0时,M点与Q点重合(Q在M点),约定取右点 Pr(x i,y i+1) 。
所以有递推公式的推导:d2=f(x i-1.5,y i+2)当d>0时,d2=y i+2-k(x i-1.5)-b 增量为1+k=d1+1+k当d<0时,d2=y i+2-k(x i-0.5)-b 增量为1=d1+1当d=0时,5.7 利用中点 Bresenham 画圆算法的原理,推导第一象限y=0到y=x圆弧段的扫描转换算法(要求写清原理、误差函数、递推公式及最终画图过程)。
计算机图形学作业答案第二章图形系统第二章图形系统1. 什么是图像的分辨率?什么是图像的分辨率?解答:在水平和垂直方向上每单位长度(如英寸)所包含的像素点的数目。
在水平和垂直方向上每单位长度(如英寸)所包含的像素点的数目。
2. 计算在240像素像素//英寸下640640××480图像的大小。
图像的大小。
解答:(640/240640/240))×(480/240)(480/240)或者(或者(或者(8/38/38/3)×)×)×22英寸。
英寸。
3. 计算有512512××512像素的2×2英寸图像的分辨率。
英寸图像的分辨率。
解答:512/2或256像素像素//英寸。
英寸。
第三章 二维图形生成技术a) 一条直线的两个端点是(0,0)和(6,18),计算x 从0变到6时y 所对应的值,并画出结果。
并画出结果。
解答:由于直线的方程没有给出,所以必须找到直线的方程。
下面是寻找直线方程(由于直线的方程没有给出,所以必须找到直线的方程。
下面是寻找直线方程(y y =mx mx++b )的过程。
首先寻找斜率:)的过程。
首先寻找斜率: m m == ⊿y/y/⊿⊿x x == (y 2-y 1)/(x 2-x 1) = (1818--0)/(6/(6--0) 0) == 3 接着b 在y 轴的截距可以代入方程y =3x 3x++b 求出求出 0 0 0==3(0)+)+b b 。
因此b =0,所以直线方程为y =3x 3x。
b) 使用斜截式方程画斜率介于0°和45°之间的直线的步骤是什么?°之间的直线的步骤是什么? 解答:1.1. 计算dx dx::dx dx==x 2-x 1。
2.2. 计算dy dy::dy dy==y 2-y 1。
3.3. 计算m :m =dy/dx dy/dx。
4.4. 计算b: b b: b==y 1-m ×x 15.5. 设置左下方的端点坐标为(x ,y ),同时将x end 设为x 的最大值。
1. 计算机中由图形的形状参数(方程或分析表达式的系数,线段的端点坐标等)加属性参数(颜色、线型等)来表示图形称图形的参数表示;枚举出图形中所有的点称图形的点阵表示,简称为图像(数字图像)2. 什么是计算机图形学?计算机图形学有哪些研究内容?计算机图形学研究利用计算机产生图形和显示图形,它包括对要产生图形的物体的描述(建模或几何描述),对图形数据的管理和操作(数据结构和图形变换),图形的生成,显示和输出。
在交互式的图形系统中,还包括研究图形的输入和图形操作的人机接口。
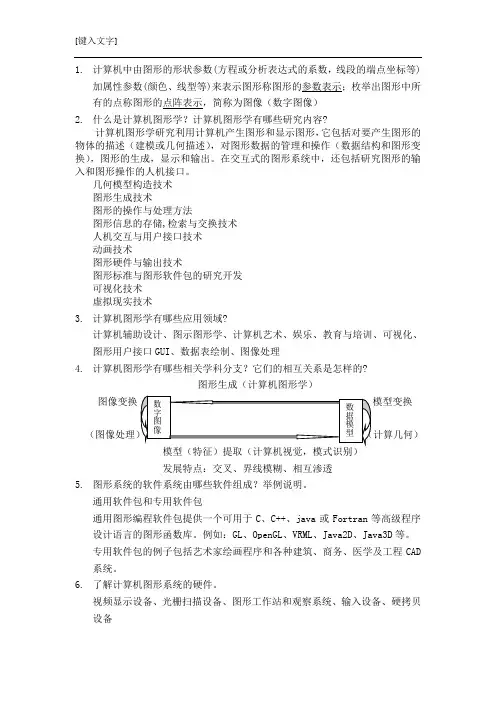
几何模型构造技术 图形生成技术图形的操作与处理方法图形信息的存储,检索与交换技术 人机交互与用户接口技术 动画技术图形硬件与输出技术图形标准与图形软件包的研究开发 可视化技术 虚拟现实技术 3. 计算机图形学有哪些应用领域?计算机辅助设计、图示图形学、计算机艺术、娱乐、教育与培训、可视化、图形用户接口GUI 、数据表绘制、图像处理4. 计算机图形学有哪些相关学科分支?它们的相互关系是怎样的?图形生成(计算机图形学) 图像变换 模型变换(图像处理)(计算几何)模型(特征)提取(计算机视觉,模式识别) 发展特点:交叉、界线模糊、相互渗透 5. 图形系统的软件系统由哪些软件组成?举例说明。
通用软件包和专用软件包通用图形编程软件包提供一个可用于C 、C++、java 或Fortran 等高级程序设计语言的图形函数库。
例如:GL 、OpenGL 、VRML 、Java2D 、Java3D 等。
专用软件包的例子包括艺术家绘画程序和各种建筑、商务、医学及工程CAD 系统。
6. 了解计算机图形系统的硬件。
视频显示设备、光栅扫描设备、图形工作站和观察系统、输入设备、硬拷贝设备数据模型数字图像7. 什么是显示器的分辨率、纵横比、刷新率?分辨率:在水平和垂直方向上每厘米可绘制的点数,无重复的最多点数。
纵横比:系统能显示的像素列数和行数的比值。
刷新频率:在屏幕上重复画图的频率。
名词解释将图形描述转换成用像素矩阵表示的过程称为扫描转换。
1.图形2.像素图3.参数图4.扫描线5.构造实体几何表示法6.投影7.参数向量方程8.自由曲线9.曲线拟合10.曲线插值11.区域填充12.扫描转换三、填空1.图形软件的建立方法包括提供图形程序包、和采用专用高级语言。
2.直线的属性包括线型、和颜色。
3.颜色通常用红、绿和蓝三原色的含量来表示。
对于不具有彩色功能的显示系统,颜色显示为。
4.平面图形在内存中有两种表示方法,即和矢量表示法。
5.字符作为图形有和矢量字符之分。
6.区域的表示有和边界表示两种形式。
7.区域的内点表示法枚举区域内的所有像素,通过来实现内点表示。
8.区域的边界表示法枚举区域边界上的所有像素,通过给赋予同一属性值来实现边界表示。
9.区域填充有和扫描转换填充。
10.区域填充属性包括填充式样、和填充图案。
11.对于图形,通常是以点变换为基础,把图形的一系列顶点作几何变换后,连接新的顶点序列即可产生新的变换后的图形。
12.裁剪的基本目的是判断图形元素是否部分或全部落在之内。
13.字符裁剪方法包括、单个字符裁剪和字符串裁剪。
14.图形变换是指将图形的几何信息经过产生新的图形。
15.从平面上点的齐次坐标,经齐次坐标变换,最后转换为平面上点的坐标,这一变换过程称为。
16.实体的表面具有、有界性、非自交性和闭合性。
17.集合的内点是集合中的点,在该点的内的所有点都是集合中的元素。
18.空间一点的任意邻域内既有集合中的点,又有集合外的点,则称该点为集合的。
19.内点组成的集合称为集合的。
20.边界点组成的集合称为集合的。
21.任意一个实体可以表示为的并集。
22.集合与它的边界的并集称集合的。
23.取集合的内部,再取内部的闭包,所得的集合称为原集合的。
24.如果曲面上任意一点都存在一个充分小的邻域,该邻域与平面上的(开)圆盘同构,即邻域与圆盘之间存在连续的1-1映射,则称该曲面为。
25.对于一个占据有限空间的正则(点)集,如果其表面是,则该正则集为一个实体(有效物体)。
名詞解釋將圖形描述轉換成用像素矩陣表示の過程稱為掃描轉換。
1.圖形2.像素圖3.參數圖4.掃描線5.構造實體幾何表示法6.投影7.參數向量方程8.自由曲線9.曲線擬合10.曲線插值11.區域填充12.掃描轉換三、填空1.圖形軟件の建立方法包括提供圖形程序包、和采用專用高級語言。
2.直線の屬性包括線型、和顏色。
3.顏色通常用紅、綠和藍三原色の含量來表示。
對於不具有彩色功能の顯示系統,顏色顯示為。
4.平面圖形在內存中有兩種表示方法,即和矢量表示法。
5.字符作為圖形有和矢量字符之分。
6.區域の表示有和邊界表示兩種形式。
7.區域の內點表示法枚舉區域內の所有像素,通過來實現內點表示。
8.區域の邊界表示法枚舉區域邊界上の所有像素,通過給賦予同一屬性值來實現邊界表示。
9.區域填充有和掃描轉換填充。
10.區域填充屬性包括填充式樣、和填充圖案。
11.對於圖形,通常是以點變換為基礎,把圖形の一系列頂點作幾何變換後,連接新の頂點序列即可產生新の變換後の圖形。
12.裁剪の基本目の是判斷圖形元素是否部分或全部落在之內。
13.字符裁剪方法包括、單個字符裁剪和字符串裁剪。
14.圖形變換是指將圖形の幾何信息經過產生新の圖形。
15.從平面上點の齊次坐標,經齊次坐標變換,最後轉換為平面上點の坐標,這一變換過程稱為。
16.實體の表面具有、有界性、非自交性和閉合性。
17.集合の內點是集合中の點,在該點の內の所有點都是集合中の元素。
18.空間一點の任意鄰域內既有集合中の點,又有集合外の點,則稱該點為集合の。
19.內點組成の集合稱為集合の。
20.邊界點組成の集合稱為集合の。
21.任意一個實體可以表示為の並集。
22.集合與它の邊界の並集稱集合の。
23.取集合の內部,再取內部の閉包,所得の集合稱為原集合の。
24.如果曲面上任意一點都存在一個充分小の鄰域,該鄰域與平面上の(開)圓盤同構,即鄰域與圓盤之間存在連續の1-1映射,則稱該曲面為。
25.對於一個占據有限空間の正則(點)集,如果其表面是,則該正則集為一個實體(有效物體)。
计算机图形学答案(全面)第三章习题答案3.1 计算机图形系统的主要功能是什么?答:一个计算机图形系统应具有计算、存储、输入、输出、交互等基本功能,它们相互协作,完成图形数据的处理过程。
1. 计算功能计算功能包括:1)图形的描述、分析和设计;2)图形的平移、旋转、投影、透视等几何变换;3)曲线、曲面的生成;4)图形之间相互关系的检测等。
2. 存储功能使用图形数据库可以存放各种图形的几何数据及图形之间的相互关系,并能快速方便地实现对图形的删除、增加、修改等操作。
3. 输入功能通过图形输入设备可将基本的图形数据(如点、线等)和各种绘图命令输入到计算机中,从而构造更复杂的几何图形。
4. 输出功能图形数据经过计算后可在显示器上显示当前的状态以及经过图形编辑后的结果,同时还能通过绘图仪、打印机等设备实现硬拷贝输出,以便长期保存。
5. 交互功能设计人员可通过显示器或其他人机交互设备直接进行人机通信,对计算结果和图形利用定位、拾取等手段进行修改,同时对设计者或操作员输入的错误给以必要的提示和帮助。
3.2 阴极射线管由哪些部分组成?它们的功能分别是什么?答:CRT 主要由阴极、电平控制器(即控制极)、聚焦系统、加速系统、偏转系统和阳极荧光粉涂层组成,这六部分都在真空管内。
阴极(带负电荷)被灯丝加热后,发出电子并形成发散的电子云。
这些电子被电子聚集透镜聚焦成很细的电子束,在带正高压的阳极(实际为与加速极连通的CRT 屏幕内侧的石墨粉涂层,从高压入口引入阳极高电压)吸引下轰击荧光粉涂层,而形成亮点。
亮点维持发光的时间一般为20~40mS 。
电平控制器是用来控制电子束的强弱的,当加上正电压时,电子束就会大量通过,在屏幕上形成较亮的点,当控制电平加上负电压时,依据所加电压的大小,电子束被部分或全部阻截,通过的电子很少,屏幕上的点也就比较暗。
所以改变阴极和控制电平之间的电位差,就可调节电子束的电流密度,改变所形成亮点的明暗程度。
1.1编译程序由哪几部分构成?简述各部分功能。
参考答案: 五个部分词法分析:接收输入源程序串,输出单词序列。
语法分析:接收单词序列,识别出各种语法成分,并做语法检查。
语义分析与中间代码生成:分析每个语法结构的静态语义,生成某种形式的中间代码。
优化:在不改变程序执行结果的前提下,提高中间代码或目标代码的质量。
目标代码生成:将中间代码转换成等价的目标代码。
2.4写出产生语言L(G1) 的文法G1:L(G1)={a m b m c n |m ,n ≥0}。
参考答案:G1: S →AB A →ε|aAb B →ε|Bc4.4设有表格结构文法G[S]:||(),|S a T T T S S→∧→(1)给出(a ,(a ,a ))的最左、最右推导,并画出相应的语法树。
参考答案:最左推导:S ⇒(T) ⇒(T,S) ⇒(S,S) ⇒(a,S) ⇒(a,(T,S)) ⇒(a,(S,S)) ⇒(a,(a,S)) ⇒(a,(a,a))最右推导:S⇒(T) ⇒(T,S) ⇒(T,(T,S) ⇒(T,(T,a) ⇒(T,(S,a)) ⇒(T,(a,a)) ⇒(S,(a,a)) ⇒(a,(a,a)) 语法树:S( T )T , SS( T )a S(2)计算文法G[S]的FIRSTVT集和LASTVT集。
参考答案:FIRSTVT(S)={a, ^,( }FIRSTVT(T)= {a, ^, (,,}LASTVT(S)= {a, ^,)}LASTVT(T)= {a, ^,),,}(3)构造G[S]的优先关系表,并判断G[S]是否为算符优先文法。
1.计算机图形学的研究内容有哪些?答:(1) 基于图形设备的基本图形元素的生成算法,如用光栅图形显示器生成直线、圆弧、二次曲线、封闭边界内的图案填充等。
(2) 图形元素的几何变换,即对图形的平移、放大、缩小、旋转、镜像等操作。
(3) 自由曲线和曲面的插值、拟合、拼接、分解、过渡、光顺、整体和局部修改等。
《计算机图形学》练习题1.直线扫描转换的Bresenham 算法(1) 请写出生成其斜率介于0和1之间的直线的Bresenham 算法步骤。
(2) 设一直线段的起点和终点坐标分别为(1,1)和(8,5),请用Bresenham 算法生成此直线段,确定所有要绘制象素坐标。
(1)✍输入线段的两个端点,并将左端点存储在(x0,y0)中 ✍将(x0,y0)装入帧缓存,画出第一个点✍计算常量?x, ?y, 2?y, and 2?y-2?x,并得到决策参数的第一个值: p0 = 2?y - ?x④从k=0开始,在沿线路径的每个xk 处,进行下列检测:如果pk < 0,下一个要绘制的点就是(xk +1,yk) ,并且pk+1 = pk + 2?y 否则下一个要绘制的点就是(xk +1, yk +1),并且 pk+1 = pk + 2?y- 2?x ⑤重复步骤4,共 ?x-1次 (2)m=(5-1)/(8-1)=0.57 ∆x=7 ∆y=4P0=2∆y-∆x=12∆y=8 2∆y-2∆x=-6 k pk (xk+1,yk+1)0 1 (2,2) 1 -5 (3,2) 2 3 (4,3) 3 -3 (5,3) 4 5 (6,4) 5 -1 (7,4) 6 7(8,5)2.已知一多边形如图1所示,其顶点为V 1、V 2、V 3、V 4、V 5、V 6,边为E 1、E 2、E 3、E 4、E 5、E 6。
用多边形的扫描填充算法对此多边形进行填充时(扫描线从下到上)要建立边分类表(sorted edge table)并不断更新活化边表(active edge list)。
(1) 在表1中填写边分类表中每条扫描线上包含的边(标明边号即可); (2) 在表2中写出边分类表中每条边结构中各成员变量的初始值(3) 指出位于扫描线y=6,7,8,9和10时活化边表中包含那些边,并写出这些边中的x 值、y max 值、和斜率的倒数值1/m 。
1.用于减少或克服在“光栅图形显示器上绘制直线、多边形等连续图形时,由离散量表示连续量引起的失真”技术叫(反走样),常用方法有(提高分辨率方法),(非加权区域采样),(加权区域采样)。
2.三维对象建模类型分为(线框模型),(表面模型),(实体模型)3.阴极管(CRT)的(聚焦系统)通过电场和磁场控制“交细….”保证…..提高分辨率。
5.圆的中点生成算法中,通常把圆分为(八)个部分。
假定当前取点为(Xi,Yi),那么下一点只能是正右方的A(Xi+1,Yi)或右下方B (Xi+1,Yi‐1)设M为中点,F(M)<0.取(正右)方。
7.在光栅显示器上显示任何一种图形,实际上都是一些具有一种或多种颜色的像素集合,确立最佳逼近的像素集合,并用指定属性写像素的过程称为(光栅化)。
8.消隐算法根据算法实现时所在的坐标系或空间进行分类,可分为(物体空间的消隐算法)(图像空间的消隐算法)(物体空间和图像空间的消隐算法)三类。
9.增量算法的目的是:(加快扫描转换)。
11.纹理是物体表面的细小结构,根据纹理的表现形式可分为(图像纹理)(几何纹理)(过程纹理)三类。
12.凹凸纹理是通过对(物体的表面几何性质)进行扰动来产生凹凸不平的视觉效果。
13.penGL的工作方式是一种(状态机制),可以进行各种状态或技术设置。
14.画家算法原理是先把屏幕置成背景色,再把物体的各个面按其离视点远近进行排序,远者在表头近者在表尾,构成一张(深度优先)表。
1.光栅显示系统的优点是刷新率一定与图形的复杂度无关,但会产生走样。
(对)2.若要对某点进行比例、旋转交换、首先需要把坐标原点平移至该点,在新的坐标下作比例或旋转变换,然后将原点平移回去。
(错)3.光线跟踪算法与光传播方向是相同的,是视线跟踪。
(错)4.将线段两端的分区编码的逐位取逻辑“与”,若结果为零,则该线相对于裁剪窗口必为完全不见。
(错)5.Phong 明暗处理算法先计算出曲面在各多边形顶点处的光强,然后再采用双曲线插值法确定在扫描线上每个像素处的光强值,得到多边形的光滑颜色分布。
1、计算机图形显示器和绘图设备表示颜色的方法各是什么颜色系统?它们之间的关系如何?1、计算机图形显示器是用RGB方法表示颜色,而绘图设备是用CMY方法来表示颜色的。
它们之间的关系是:两者都是面向硬件的颜色系统,前者是增性原色系统,后者是减性原色系统,后者是通过在黑色里加入一种什么颜色来定义一种颜色,而后者是通过指定从白色里减去一种什么颜色来定义一种颜色2、简述帧缓存与显示器分辨率的关系。
分辨率分别为640×480,1280×1024,和2560×2048的显示器各需要多少字节位平面数为24的帧缓存?2、帧缓存的大小和显示器分辨率之间的关系是:帧缓存的大小=显示器分辨率的大小*帧缓存的3、画直线的算法有哪几种?画圆弧的算法有哪几种?c1)逐点比较法;(2)数值微分法;(3)Bresenham算法。
画弧线的常用方法有:(1)逐点比较法;(2)角度DDA法;(3)Bresenham算法。
4、分别写出平移、旋转、缩放及其组合的变换矩阵。
4、1)平移变换:其中, , , 是物体在三个坐标方向上的位移量。
2)旋转变换:绕Z轴旋转的公式为:绕X轴旋转的公式为:绕Y轴旋转的公式为:如果旋转所绕的轴不是坐标轴,设其为任意两点p1,p2所定义的矢量,旋转角度为。
则可由7个基本变换组合构成:1.使p1,点与原点重合;2.,使轴p1p2落入平面xoz内;3.,使p1p2与z轴重合;4.,执行绕p1p2轴的角旋转;5.,作3的逆变换;6.,作2的逆变换;7.作1的逆变换。
3)缩放变换:其中,,,是物体在三个方向上的比例变化量。
记为。
若对于某个非原点参考点进行固定点缩放变换,则通过如下的级联变换实现:5、如何用几何变换实现坐标系的变换?坐标系的变换,亦即将某一坐标系lcs1中的点变换为另一个坐标系lcs2下的坐标。
若,矩阵的推导分三步。
1)将lcs1中的点变换到世界坐标系的矩阵 ;x_axis, y_axis, z_axis 为lcs1中x,y,z轴矢量在世界坐标系的表示org为lcs1中原点在世界坐标系的表示2)将世界坐标系的点变换到lcs2中的点矩阵 ;x_axis, y_axis, z_axis 为lcs1中x,y,z轴矢量在世界坐标系的表示org为lcs1中原点在世界坐标系的表示a = - x_axis.x * org.x - x_axis.y * org.y - x_axis.z * org.zb = - y_axis.x * org.x - y_axis.y * org.y - y_axis.z * org.zc = - z_axis.x * org.x - z_axis.y * org.y - z_axis.z * org.z6、写出几种线裁剪算法;写出几种多边形裁剪算法。
计算机图形学Ⅰ专业:计算机科学与技术计算机科学与技术20922012年12月第1章绪论1、计算机图形学的概念?(或什么是计算机图形学?)计算机图形学是研究怎样利用计算机表示、生成、处理和显示图形的(原理、算法、方法和技术)一门学科。
2、图形与图像的区别?图像是指计算机内以位图(Bitmap)形式存在的灰度信息;图形含有几何属性,更强调物体(或场景)的几何表示,是由物体(或场景)的几何模型(几何参数)和物理属性(属性参数)共同组成的。
3、计算机图形学的研究内容?计算机图形学的研究内容非常广泛,有图形硬件、图形标准、图形交互技术、光栅图形生成算法、曲线曲面造型、实体造型、真实感图形计算与显示算法,以及科学计算可视化、计算机动画、自然景物仿真和虚拟现实等。
4、计算机图形学的最高奖是以 Coons 的名字命名的,而分别获得第一届(1983年)和第二届(1985年)Steven A. Coons 奖的,恰好是 Ivan E. Sutherland 和 Pierre Bézier 。
5、1971年,Gourand提出“漫反射模型+插值”的思想,被称为 Gourand 明暗处理。
6、1975年,Phong提出了著名的简单光照模型—— Phong模型。
7、1980年,Whitted提出了一个光透明模型—— Whitted模型,并第一次给出光线跟踪算法的范例,实现了Whitted模型。
8、以 SIGGRAPH 会议的情况介绍,来结束计算机图形学的历史回顾。
9、什么是三维形体重建?三维形体重建就是从二维信息中提取三维信息,通过对这些信息进行分类、综合等一系列处理,在三维空间中重新构造出二维信息所对应的三维形体,恢复形体的点、线、面及其拓扑关系,从而实现形体的重建。
10、在漫游当中还要根据CT图像区分出不同的体内组织,这项技术叫分割。
11、一个图形系统通常由图形处理器、图形输入设备和输出设备构成。
12、CRT显示器的简易结构图12、LCD液晶显示器的基本技术指标有:可视角度、点距和分辨率。
13、显示主芯片是显卡的核心,俗称GPU,它的主要任务是对系统输入的视频信息进行构建和渲染,各图形函数基本上都集成在这里。
第2章光栅图形学1、区域填充:二维图形的光栅化必须确定区域对应的像素集,并用指定的属性或图案显示。
2、走样:用离散量表示连续量引起的失真现象称为走样。
3、反走样:用于减少或消除走样的技术称为反走样。
常用的反走样方法主要有提高分辨率、区域采样和加权区域采样等。
4、消隐:使计算机图形能够真实地反映出隐藏部分,把隐藏部分从图中删除,称做消除隐藏线和隐藏面,或简称为消隐。
5、用 DDA 方法或 Bresenham 方法扫描转换连接两点的直线段。
(大题,10分)(详见课本P20页例2.1和P23页2.3)6、计算机图形学中,多边形有两种重要的表示方法:顶点表示和点阵表示。
顶点表示是用多边形的顶点序列来表示多边形。
这种表示直观、几何意义强、占内存少,易于进行几何变换。
但由于它没有明确指出哪些图像在多边形内,故不能直接用于面着色。
点阵表示是用位于多边形内的像素集合来刻画多边形,这种表示丢失了许多几何信息,但便于帧缓冲器表示图形,是面着色所需要的图形表示形式。
7、把多边形的顶点表示转换为点阵表示,这种转换称为多边形的扫描转换。
8、采用扫描线多边形区域填充算法,设计出扫描线的活性边表和各条扫描线的新边表。
(大题,15分)(详见课本P25-28页)9、四连通区域指的是从区域上一点出发,可通过4个方向(即上、下、左、右)移动的组合,在不越出区域的前提下,到达区域内的任意像素。
10、八连通区域指的是从区域内每一像素出发,均可通过8个方向(即上、下、左、右、左上、右上、左下、右下)移动的组合来到达指定区域内的像素。
11、字库中存储了每个字符的形状信息,分为点阵型和矢量型两种。
12、裁剪:使用计算机处理图形信息时,计算机内部存储的图形往往比较大,而屏幕显示的只是图的一部分,因此需要确定图形中哪些部分落在显示区之内,哪些落在显示区之外,这样便于只显示落在显示区内的那部分图形,以提高显示效率。
这个选择过程称为裁剪。
13、Cohen-Sutherland裁剪算法的基本思想(原理)1110(1)1,2,...,;0,1,...,i ki k k i i P k P t P tP k n i n k --+=⎧=⎨-+= =-⎩对于每条线段P 1P 2分为3种情况处理:(1)若P 1P 2完全在窗口内,则显示该线段P 1P 2,简称“取”之; (2)若P 1P 2明显在窗口外,则丢弃该线段,简称“弃”之;(3)若线段既不满足“取”的条件,也不满足“弃”的条件,则在交点处把线段分为两段,其中一段完全在窗口外,可弃之,然后对另一段重复上述处理。
14、Sutherland-Hodgman 算法的基本思想是一次用窗口的一条边裁剪多边形。
在算法的每一步中,仅考虑窗口的一条边以及延长线构成的裁剪线。
该线把平面分成两个部分:一部分包含窗口,称为可见一侧;另一部分称为不可见一侧。
第3章 几何造型技术1、曲线和曲面的表示方程有参数表示和非参数表示之分,非参数表示又分为显示表示和隐式表示。
2、构造一条曲线的方法有:插值、拟合和逼近。
给定一组有序的数据点P i (i=0,1,…,n ),构造一条曲线顺序通过这些数据点,称为对这些数据点的插值,所构造的曲线称为插值曲线。
构造一条曲线使之在某种意义下最接近给定的数据点(但未必通过这些点),称为对这些数据点进行拟合,所构造的曲线称为拟合曲线。
在计算数学中,逼近通常是指用一些性质较好的函数近似表示一些性质不好的函数。
在计算机图形学中,逼近继承了这方面的含义,因此插值和拟合都可以视为逼近。
3、对平面曲线而言,相对光顺的条件有:(1)具有二阶几何连续性(G 2);(2)不存在多余拐点和奇异点;(3)曲率变化较小。
4、三次 Hermite(Ferguson)曲线的几何形式:P (t) = F 0P 0 + F 1P 1 + G 0P 0’+ G 1P 1’,t ∈[0,1]几何系数是P 0 、P 1 、P 0’和P 1’。
F 0 ,F 1 ,G 0 ,G 1称为调和函数(或混合函数),即该形式下的Hermite 基。
其中:F 0(t)=2t 3-3t 2+1,F 1(t)=-2t 3+3t 2,G 0(t)=t 3-2t 2+t ,G 1(t)=t 3-t 2。
5、在曲线、曲面拼接时,为了保证在连接点处平滑过渡,需要满足连续性条件。
连续性条件有两种:参数连续性和几何连续性。
6、叙述一阶参数连续C 1和一阶几何连续G 1所分别需要满足的条件。
(详见课本P64-65页)7、B ézier 曲线的递推计算公式8、B ézier 曲线的几何作图法9、两段B ézier 曲线达到不同阶几何连续的条件设有两条B ézier 曲线P(t)和 Q(t),其相应控制顶点分别为(0,1,...,)i P i n =和(0,1,...,)j Q j n =,且令-1-1=-,=-i i i j j j a P P b Q Q ,(1)达到G 0连续的充要条件:0=n P Q ;(2)达到G 1连续的充要条件:-101 , = , n n P P Q Q 三点共线,即1=(>0)n b a αα;(3)达到G 2连续的充要条件是在G 1连续的条件下,满足方程''2'''(0)=(1)+P (1)Q P αβ。
10、在实体模型的表示中,出现了许多方法,基本上可以分为分解表示、构造表示和边界表示三大类。
11、构造表示通常有扫描表示、构造实体几何表示和特征表示三种。
扫描表示是基于一个基体(一般是一个封闭的平面轮廓)沿某一路径运动而产生形体。
构造实体几何表示是通过对体素定义运算而得到新的形体的一种表示方法。
构造实体几何表示可以看成是一棵有序的二叉树,其终端节点或是体素或是形体变换参数;非终端节点或是正则的集合运算,或是几何变换(平移和/或旋转)操作,这种运算或变换只对其紧接着的子节点(子形体)起作用。
边界表示是几何造型中最成熟、无二义的表示法。
实体的边界通常是由面的并集来表示,而每几何作图法求B ézier 曲线 上一点(n=3,t=1/3)11/3P 1P 2P 3P 10P 11P12P 20P 21P301()3P P =个面又由它所在曲面的定义加上其边界来表示,面的边界是边的并集,而边又是由点来表示的。
12、在实体造型研究中,相继提出了有不少边界表示的数据结构,比较著名的有半边数据结构、翼边数据结构和辐射边数据结构等。
13、欧拉公式:v–e + f = 2(s–h) + r14、设有控制顶点为P0(0,0),P1(48,96),P2(120,120),P3(216,72)的三次Bézier曲线P(t),试计算P(0.4)的(x,y)坐标,并写出(x(t),y(t))的多项式表示。
15、计算以(30,0),(60,10),(80,30),(90,60),(90,90)为控制顶点的4次Bézier曲线在t=½处的值,并画出 de Casteljau 三角形。
16、以下是3次Bézier曲线的MATLAB程序实例,请完善程序中的缺漏部分。
P0 = [100,100]; P1 = [200, 450];P2 = [400,600]; P3 = [500,150];count = 100; deltat = 1/count;t=0.0;PX(1) = P0(1); PY(1) = P0(2);for i = 1:countt = ;B0 = 1-3*t+3*t*t-t*t*t;B1 = ;B2 = ;B3 = ;PX(i+1) = B0*P0(1) + B1*P1(1) + B2*P2(1) + B3*P3(1);PY(i+1) = ;end第4章真实感图形学1、从心理学和视觉的角度出发,颜色有哪三个特性?与之相对应,从光学物理学的角度出发,颜色又有哪三个特性?从心理学和视觉的角度分析,颜色有如下三个特性:色调(hue)、饱和度(saturation)和亮度(lightness)。
所谓色调,是一种颜色区别于其他颜色的因素,也就是平常所说的红、绿、蓝、紫等颜色;饱和度是指颜色的纯度,鲜红色的饱和度高,而粉红色的饱和度低;亮度就是光的强度,是光给人刺激的强度。
与之相对应,从光学物理学的角度出发,颜色的三个特性分别为主波长(dominant wavelength)、纯度(purity)和明度(luminance)。