平衡吊的动力学与运动学仿真
- 格式:docx
- 大小:238.42 KB
- 文档页数:16
QY20汽车起重机动力学仿真分析江苏省特种设备安全监督检验研究院无锡分院方维摘要:虚拟样机作为产品设计的一项新技术,对于传统的产品设计方法是一次革命。
本文利用ADAMS软件构建了QY20汽车起重机动力学仿真模型,并对其在带载回转过程中的突然卸载工况进行了分析。
关键词:虚拟样机;ADAMS;汽车起重机;动力学仿真Abstract: As a new technology of product design, Virtual Prototype is a revolution to traditional method of products design. In this paper, the model of QY20 truck crane was built based on ADAMS and analysis the process of rotating with weight remove abruptly.Key words:Virtual prototyping;ADAMS;Truck crane;Dynamic simulation引言在传统的设计与制造过程中,首先是概念设计和方案论证,然后进行产品设计。
在设计完成后,为了验证设计,通常要制造样机进行试验,有时这些试验甚至是破坏性的。
当通过试验发现缺陷是,又要回头修改设计并再用样机进行试验。
只有通过周而复始的设计——试验——设计过程,产品才能达到要求的性能。
通过虚拟样机技术,工程设计人员直接利用CAD系统所提供的零部件的物理信息以及其几何信息,在计算机上定义零部件间的连接关系并对机械系统进行虚拟装配,从而获得机械系统的虚拟样机,使用系统仿真软件在各种虚拟环境中真实地模拟系统的运动,并对其在各种工况下的运动和受力情况进行仿真分析,观察并试验各组成部件的相互运动情况,它可以在计算机上方便地修改设计缺陷,仿真试验不同的设计方案,对整个系统进行不断的改进,直至获得最优设计方案以后,再做出物理样机[1]。
平衡吊得运动学与动力学仿真作者:** 指导老师:************ ***************1绪论1、1平衡吊得概要平衡吊就是得主要结构就是平行四边形连杆机构得放大形态与螺母升降结构,通过外力得作用下达到重物得上升与下降得目得,平衡吊可以满足重物随时停留在需要得工作区域内。
比其她得吊装设备更具有优越性,它比一般吊装设备更加得灵活,从而更加得精准,与机械手相比等其她吊装设备比,其结构更加得合理,性能较好,广泛得使用于重工业得生产中,在机床厂中更就是被用作吊装作业,在小型企业装卸货物,例如码头得施工,集装箱得搬运,非常适合于作业区域窄,时间间隔短得作业方式。
其极大减少了人力使用,有效地节约了人力资源。
平衡吊在市场上主要常见得有3种,机械式,气动式,液压式,机械式,顾名思义,通过外力得使用,使其达到升降得目得,主要在生产,搬运得得领域中常见,后期,更就是添加了电动装置,优化了她得配置,有效地提高了生产效率。
气动式平衡吊主要就是对于气压得控制原理实现升降功能得我们成为气动式平衡吊,液压式,主要就是根据液压系统来设置得,在大多数重工业生产地使用广泛。
现在主要使用得为气动式平衡吊,主要省力,都就是自动化进行得,按照平衡吊臂得类型还可以将平衡吊分为通用与专用类型,她们各有各得特色,相对于大型得吊车来说,其缺点就是工作得行程范围较小,区域局限化。
平衡吊得种类及其特点:液压平衡吊得特点:液压平衡吊有3大类,有级,单级,无级变速得,她们通过不同得油路控制来达到不同得工作地点;气动平衡吊得特点:体积不大,比一般得平衡吊具有灵活得特色;电动平衡吊:又称为机械式平衡吊,具有控制重物在任意指定地点得特点,一般为定速转动;Cad(2D)+solidworks(3D)图纸整套免费获取,需要得加QQ11624013871、2平衡吊得结构平衡吊主要有大小臂,起重臂,短臂,电机,立柱,丝杆螺母传动副构成得,其中得几个臂件通过平行四边形连杆机构构成得。
起重机攀爬机器人运动学分析与仿真*赵章焰 秦 烺武汉理工大学交通与物流工程学院 武汉 430063摘 要:为了提高大型起重机械表面检测维护的安全性和效率,使用设计的攀爬机器人替代工作人员。
文中以攀爬机器人为研究对象,对其越障过程中的运动学以及运行轨迹进行研究。
采用改进的D-H 参数法对机器人支腿建立关节模型,在此基础上推导机器人的正逆运动学模型。
以蒙特卡洛法分析机器人越障过程中的支腿工作空间,并计算绘制机器人支腿末端点的工作云图。
使用五次多项式插值方法研究机器人在越障过程中从初始点到终点的路径,利用Matlab 的Robotics Toolbox 工具箱进行轨迹规划仿真,并分析机器人支腿末端点的位移、速度、加速度和轨迹。
仿真结果表明,机器人在越障过程中运行平稳,能够顺利完成工作。
运动学的分析也为后续的动力学、控制算法以及运动规划分析奠定理论基础。
关键词:攀爬机器人;运动学分析;多项式插值;工作域;轨迹规划中图分类号:TP242 文献标识码:A 文章编号:1001-0785(2022)14-0014-06Abstract: In order to improve the safety and efficiency of surface inspection and maintenance of large-scale hoisting machinery, climbing robots are used instead of workers. In this paper, the climbing robot is taken as the research object, and its kinematics and trajectory in the process of obstacle crossing are studied. The improved D-H parameter method is used to establish the joint model of the robot leg, and on this basis, the forward and inverse kinematics model of the robot is deduced. Monte Carlo method is used to analyze the workspace of the robot's outrigger during obstacle crossing, and the working cloud map of the robot's outrigger end point is drawn. The quintic polynomial interpolation method is used to study the path of the robot from the initial point to the end point in the obstacle-crossing process. The trajectory is simulated and planned by the Robotics Toolbox of Matlab, and the displacement, velocity, acceleration and trajectory of the robot's leg end point are analyzed. The simulation results show that in the process of obstacle-crossing, the robot runs smoothly and can finish the work smoothly. Kinematics analysis lays a theoretical foundation for subsequent dynamics, control algorithm and motion planning analysis.Keywords: climbing robot; kinematics analysis; polynomial interpolation; work domain; trajectory planning*基金项目:国家级基金“机电类特种设备风险防控与治理关键技术研究及装备研制”(2017YFC0805703)0 引言起重机械是用于港口码头装卸货物的主要设备,随着工作年限的增加会出现裂痕、生锈或表面污渍等现象,故需定期检查与清洁。
平臂塔式起重机断绳卸载动力学仿真分析Dynamic Simulation Analysis of the Topless Tower Crane under the Unintentional Loss of Hoist Load Condition due to Hoist Rope Rupture0 引 言平臂塔式起重机(以下简称平臂塔机)是一种臂架水平、以小车实现变幅的桁架结构起重机,是建筑、桥梁工程建设中不可或缺的一种特种设备。
随着塔机行业快速发展,塔机在极限安全工况下的安全性能日益得到重视[1-3]。
由于起升钢丝绳突然断裂或是起升吊钩出现脱落引起的突然卸载工况就属于塔机的一种极限安全工况,其一旦发生,将可能造成重大人员伤亡和财产损失。
因此,研究断绳突然卸载工况下产生的冲击载荷对塔机结构安全性能的影响,是塔机结构设计中非常重要的一环。
目前已颁布的国内外标准中对突然卸载产生的冲击载荷计算均采用起升载荷质量乘以一个突然卸载动力系数,然而国内外标准对该动力系数的取值规定存在差异。
根据《起重机设计规范》GB/T 3811-2008、《塔式起重机设计规范》GB/T 1372-2017和《Cranesafety –General design Part 2:Load actions》BS EN13001-2:2014中规定的计算方法,塔机在正常工作中发生突然卸载时动力系数ϕ3取-1.0[4-6]。
而《Cranes-Designprinciples for loads and load combinations-Part 3:Tower cranes》ISO 8686-3:2018(E)中指出,由突然卸除部分起升载荷引起的动力系数的计算方法不适用于塔式起重机。
而对于塔机因起升绳断裂或是意外坠落起升载荷引起的突然卸载工况,ISO 8686规定采用动力系数ϕ9(ϕ9=-0.3)验算塔机结构的强度与稳定性,该动力系数的取值也可由动力学仿真模型计算或试验手段确定[7]。

平衡吊的运动学与动力学仿真作者:** 指导老师:************ ***************1绪论1.1平衡吊的概要平衡吊是的主要结构是平行四边形连杆机构的放大形态和螺母升降结构,通过外力的作用下达到重物的上升和下降的目的,平衡吊可以满足重物随时停留在需要的工作区域内。
比其他的吊装设备更具有优越性,它比一般吊装设备更加的灵活,从而更加的精准,与机械手相比等其他吊装设备比,其结构更加得合理,性能较好,广泛的使用于重工业的生产中,在机床厂中更是被用作吊装作业,在小型企业装卸货物,例如码头的施工,集装箱的搬运,非常适合于作业区域窄,时间间隔短的作业方式。
其极大减少了人力使用,有效地节约了人力资源。
平衡吊在市场上主要常见的有3种,机械式,气动式,液压式,机械式,顾名思义,通过外力的使用,使其达到升降的目的,主要在生产,搬运的的领域中常见,后期,更是添加了电动装置,优化了他的配置,有效地提高了生产效率。
气动式平衡吊主要是对于气压的控制原理实现升降功能的我们成为气动式平衡吊,液压式,主要是根据液压系统来设置的,在大多数重工业生产地使用广泛。
现在主要使用的为气动式平衡吊,主要省力,都是自动化进行的,按照平衡吊臂的类型还可以将平衡吊分为通用和专用类型,他们各有各的特色,相对于大型的吊车来说,其缺点是工作的行程范围较小,区域局限化。
平衡吊的种类及其特点:液压平衡吊的特点:液压平衡吊有3大类,有级,单级,无级变速的,他们通过不同的油路控制来达到不同的工作地点;气动平衡吊的特点:体积不大,比一般的平衡吊具有灵活的特色;电动平衡吊:又称为机械式平衡吊,具有控制重物在任意指定地点的特点,一般为定速转动;Cad(2D)+solidworks(3D)图纸整套免费获取,需要的加QQ11624013871.2平衡吊的结构平衡吊主要有大小臂,起重臂,短臂,电机,立柱,丝杆螺母传动副构成的,其中的几个臂件通过平行四边形连杆机构构成的。

平衡吊——力学平衡原理应用一例王克在工厂车间里搬运重物,往往都是采用起重机、电葫芦、工业机械手等。
但对于需要频繁吊装、作业时间短的场合,如机床上下工件,装配工作吊装零部件,流水线上的定点工作等等;对于要求比较精确定位的场合,如铸造中的下芯、合箱等等,一般起重设备常不适用,工业机械手多用于生产自动线上或单一的重复操作,而且成本较高,目前,一般车间使用较少。
(Balance Arm),近20年来,出现的一种新型的定点起重设备“平衡吊”适用于几十到几百千克工件的定点频繁吊运。
它的结构简单,操作灵活,特别适合于一人操作,直观感觉好,制造、维修方便,在生产中已逐步得到推广,受到工人的欢迎。
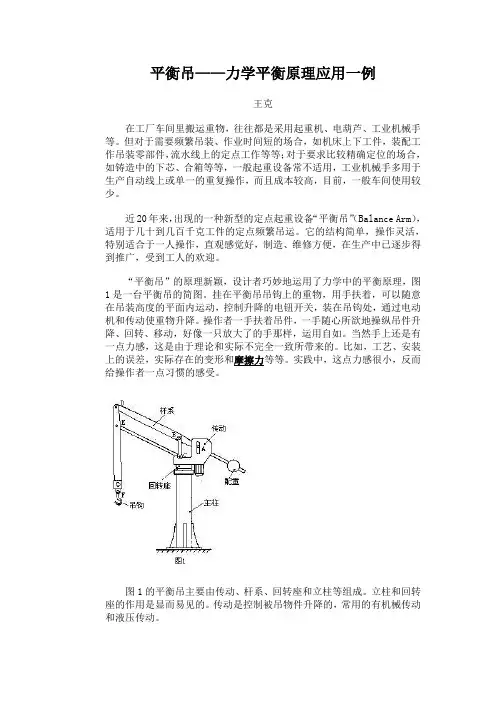
“平衡吊”的原理新颖,设计者巧妙地运用了力学中的平衡原理,图1是一台平衡吊的简图。
挂在平衡吊吊钩上的重物,用手扶着,可以随意在吊装高度的平面内运动,控制升降的电钮开关,装在吊钩处,通过电动机和传动使重物升降。
操作者一手扶着吊件,一手随心所欲地操纵吊件升降、回转、移动,好像一只放大了的手那样,运用自如。
当然手上还是有一点力感,这是由于理论和实际不完全一致所带来的。
比如,工艺、安装上的误差,实际存在的变形和摩擦力等等。
实践中,这点力感很小,反而给操作者一点习惯的感受。
图1的平衡吊主要由传动、杆系、回转座和立柱等组成。
立柱和回转座的作用是显而易见的。
传动是控制被吊物件升降的,常用的有机械传动和液压传动。
平衡吊为什么能在空载或负载时,吊钩在平面内任一点处于平衡状态,即力学中的随遇平衡呢?这正是设计者在杆系设计中,巧妙地运用了力学中平衡的原理。
杆系由ABD,DEF,BC,CE四杆铰接组成一个平行四连杆机构,其中在杆系的A,C处置两个滚轮,安放在传动箱的垂直和水平导槽内,电机通过传动使A轮升降,达到重物升降的动作。
电机不工作时,A轮可以视为不动,犹如一个固定铰链,此时杆系如图2所示。
先将杆系的杆件理想化为刚体,自重不计,尺寸无误差,各节点处摩擦不考虑。
悬吊式变质量系统动力学与控制联合仿真方法悬挂式变质量系统是一种新型的控制系统,其在航空航天、船舶、车辆等领域有着广泛的应用。
然而,由于其特殊的动态特性,传统的仿真方法难以准确地描述其动态特性。
因此,本文提出了一种基于动力学与控制联合仿真的方法,有效地解决了悬挂式变质量系统的动态特性建模与仿真问题。
首先,文章对悬挂式变质量系统的动态特性进行了详细的分析,并提出了相应的数学模型。
其次,采用MATLAB/Simulink建立了悬挂式变质量系统的仿真模型,并进行了初步的仿真。
然而,传统的仿真方法无法准确地描述悬挂式变质量系统的变质量特性,因此,本文采用了基于动力学与控制联合仿真的方法进行模拟。
基于动力学与控制联合仿真的方法,是将动力学仿真与控制仿真相结合的一种仿真方法。
该方法可以将动态特性、控制策略和控制器的优化方案等综合考虑,从而准确地描述悬挂式变质量系统的动态特性。
本文采用了基于动力学与控制联合仿真的方法,对悬挂式变质量系统进行了深入的分析和仿真。
仿真结果表明,该方法可以有效地描述悬挂式变质量系统的动态特性,并得到了较为准确的仿真结果。
同时,本文也对该方法的适用范围和局限性进行了讨论和分析。
综上所述,本文提出的基于动力学与控制联合仿真的方法,可以有效地解决悬挂式变质量系统的动态特性建模与仿真问题。
该方法不仅可以提高悬挂式变质量系统的控制性能,还可以为相关领域的研究
提供有力的支持。
小车吊重系统动力学模型与仿真作者:王银安来源:《科技视界》2015年第11期【摘要】消除或控制吊重的摇摆对提高起重机的工作效率、减少装卸作业安全隐患具有重要意义,掌握吊重摆动的动力学特性是研究起重机防摇控制的前提条件。
本文建立了小车-吊重系统的动力学模型,并以此模型进行了多种工况下的动态仿真。
通过仿真分析得到了小车加速度和吊重绳长对吊重摆角和摆动频率的影响规律。
【关键词】防摇;小车吊重系统;动力学模型;仿真【Abstract】Eliminating and controlling the swing of loads is very important for increasing the work efficiency of crane as well as decreasing safety hazard during loading and unloading operation.The dynamic characteristic of load sway is the precondition for studying the anti-swaing control plan for gantry crane.A dynamic model of trolley load system is developed in thispaper.Different working states of crane are simulated with this dynamic model.Simulation results show the influences of trolley acceleration and rope length on the swing angle and frequency.【Key words】Anti-swing;Trolley-load system;Dynamic model;Simulation0 引言桥式起重机广泛应用于码头、电厂等各个领域,是一种重要的装卸作业机械。
智能平衡吊工作原理嗨,朋友!今天咱们来唠唠智能平衡吊这个超酷的家伙。
你看啊,智能平衡吊就像是一个超级灵活的大力士。
它主要是靠一些超级厉害的技术来工作的呢。
这智能平衡吊里面有个很关键的东西叫平衡系统。
这个平衡系统啊,就像是给吊臂装了一个超级智能的天平。
不管你吊起的东西是重还是轻,这个天平都能让吊臂感觉就像没吊东西一样轻松自在。
想象一下,你拿着一个气球,是不是感觉轻飘飘的,几乎不费什么力气就能举着它到处走呀?智能平衡吊的平衡系统呢,就是要让它在吊起很重的东西的时候,操作起来也能像举着气球那么轻松。
它是怎么做到的呢?其实啊,这里面有很多精密的传感器在起作用。
这些传感器就像是小侦探一样,时刻侦查着吊臂的状态。
如果吊臂因为吊起东西有点倾斜了,传感器马上就能察觉到,然后迅速告诉平衡系统:“兄弟,这边有点歪啦,赶紧调整调整。
”平衡系统接到消息后,就会立刻调整吊臂各个部位的力量,让吊臂重新回到平衡的状态。
再说说智能平衡吊的动力部分吧。
它的动力就像是一个充满活力的小引擎。
这个动力系统可聪明啦,它能根据吊起物品的重量和操作的需求,恰到好处地提供力量。
比如说,你要慢慢地把一个很精致的仪器吊起来放到一个很精确的位置,动力系统就会温柔地输出一点点力量,就像你小心翼翼地捧着一个宝贝一样。
要是吊起一个大铁疙瘩呢,它就会鼓足劲儿,但是又不会用力过猛,保证整个吊起和移动的过程稳稳当当的。
还有啊,智能平衡吊的操控部分也特别有趣。
它的操控就像是在玩一个超级简单又好玩的游戏。
操作人员只需要轻轻推动操作杆,就像你在手机上玩那种划屏游戏一样轻松。
你往左推操作杆,吊臂就听话地往左移动;你往右推,它就往右走。
而且啊,这个操作的反应速度超级快,几乎是你这边刚有动作,那边吊臂就已经开始动起来了。
这是因为智能平衡吊内部的控制系统就像一个超级大脑,它能迅速处理操作杆传来的信号,然后指挥吊臂和动力系统做出相应的动作。
智能平衡吊还有一个很贴心的功能呢。
它可以根据不同的工作场景和任务,自动调整一些参数。
路面动态载荷之悬吊入力与疲劳损伤分析第一部分:悬吊载荷之多体动力学模拟Suspension Load and Twist Beam Fatigue Analysis with Dynamic Road Load InputsPart I: Multi-body Dynamics Suspension LoadSimulation傅增棣谢滋恩纪翔和单一凡(华创车电技术中心股份有限公司新北市 23144)摘要: 正确的多体动力学仿真,是使用计算机数值模型预估疲劳损伤入力的基础,其中主要的关键就是来自于实测的数据与良好的模型架构。
然而,由于开发时程与资源之限制,工程师往往必须面对车辆各种特性变异等真实世界之挑战。
本文尝试运用多种不同的方式,将多体动力学MotionView车辆模型的仿真结果,与实际路面之动态量测数据进行匹配,并且分析取得悬吊的接点入力,以提供后续疲劳损伤分析之用。
由其成果可见,仿真与实测数据匹配良好,仿真质量也能同时符合动态行为与疲劳损伤分析指标之要求。
关键词:路面载荷多体动力学悬吊模拟 MotionViewAbstract: Using simulation to predict loads for fatigue analysis relies on obtaining accurate results from multi-body dynamics models. Key elements like physical test data and model structure are important to the success of simulation. However, owing to the limits of development time and resources, engineers are facing challenges from characteristic variation in the real world. This paper covers various approaches used to correlate multi-body dynamics models from MotionView with physical road data. The intent is to apply such models for generating suspension joint loads for successive fatigue damage prediction. Simulation results match well with test data, whose quality fulfills requirements from dynamic behaviors and fatigue damage analysis.Keywords:Road Load Data, Multi-body Dynamics, Suspension Simulation, MotionView1 简介随着计算机数值处理能力以及软件使用界面便利性的提升,计算机辅助工程在复杂与动态系统之仿真需求也与日俱增[1, 2]。
基于Flexsim的吊钩生产系统建模与仿真工业工程专业毕业设计设计报告2021年5月9日江西理工大学应用科学学院毕业设计基于Flexsim的吊钩生产系统建模与仿真摘要随着全球经济一体化步伐加快,生产企业间的竞争更趋激烈,降低产品成本是企业在竞争中取胜的关键。
企业为了降低成本,合理配置物流资源,合理地构建物流工程是必不可少的。
当前,我国现代物流在功能和发展潜力上的主要问题在于现代物流系统的不完善以及物流运作过程的不合理。
自然形成的物流系统很难保证其可靠性、合理性、协调性和最优性。
因此,对生产物流系统的研究是提高企业生产效率,降低生产成本,提高设备利用率的重要手段。
生产物流系统属于具有高度随机性的复杂离散事件系统,用传统方法分析比较困难。
计算机仿真技术是目前比较先进的物流系统研究方法,它的一个最大的优点是不需实际安装设备、不需实际实施方案即可验证设备的导入效果和比较各种方案的优劣。
因此,它对降低整个物流投资成本起到不可或缺的作用。
运用系统仿真技术对物流系统进行研究的方法及工具有很多,本文采用的仿真平台是Flexsim仿真软件。
本文首先从生产物流系统的特点出发,论证了系统仿真技术在生产物流系统研究中的重要作用,说明了系统仿真技术是研究生产物流系统的行之有效的方法;其次,以系统仿真技术理论为基础,分析了在生产物流系统这样一个高度离散性的系统中,运用仿真技术进行仿真的一般策略和步骤, 归纳出了 Flexsim仿真软件的主要功能和特点,以及在Flexsim中进行仿真的一般步骤和方法;最后利用系统仿真软件Flexsim对某公司吊钩的生产物流系统进行了仿真。
在对吊钩生产系统分析的基础上,利用系统仿真软件Flexsim对其生产的物流状况进行了建模,并通过仿真试验以及仿真分析,研究了系统中出现的瓶颈问题,对系统的瓶颈问题进行了分析与探讨,并针对瓶颈问题建立了解决这一瓶颈的优化模型。
关键词:生产物流;离散事件;系统仿真;FlexsimI马力:基于Flexsim的吊钩生产系统建模与仿真Hook production system modeling and simulation based onFlexsimAbstractAt Present the global economic integration is accelerating quickly, and the competitiveness of manufacturing enterprises becomes fiercer. To the modem manufacturing sector to reduce production cost is the crucial link in the competition to win. In order to reduce production cost, rational logistics resource allocation and enhancing the construction of logistics engineering, are the most absolutely necessary. At present, the main problems on logistics function and logistical development potential in china, which are imperfect in the modem logistics system and unreasonable in the logistical processing. Therefore, study of the production logistics system is the important means to increase production efficiency, reduce production costs and improve the equipment utilization.Production logistics system is a kind of the complex discrete event system with high degree of randomness, traditional analysis becomes more difficult. The technology of computer simulation is a kind of bank advanced method to study the logistics system, and one of it's biggest advantage is that we can test the effete of equipment and compare the merits of various options without actual installation of equipment and implementation of program. So it played an indispensable role for lowering the whole investment cost of logistics.There are a lot of methods and tools of the on the simulation of production logistics system, in this paper we do some research with the platform of Flexsim. Firstly, according to the characters of production logistics system,with the paper arguments that the system simulation technique is important on the research of the logistics system, it is thevalid method for logistics system research; Secondly, it is based on the theories of system simulation, analyzes the method and step in the simulation of production logistics system, generalizes the function and characters of the simulation on Flexsim; Finally, we do some simulation on this productionlogistics system of one company hook production and find out the logistics system bottleneck with the simulation of Flexsim. And put forward a solution.KeyWords: production logistics; discrete event; system simulation; FlexsimII江西理工大学应用科学学院毕业设计目录第1章绪论 ........................................................................... (1)1.1 研究背景 ........................................................................... ............................................................ 1 1.2 研究意义 ........................................................................... ............................................................ 1 1.3 本文的研究方法 ........................................................................... ............................................ 2 1.4 论文研究内容及技术路线 ........................................................................... ....................... 2 第2章生产物流系统分析 ........................................................................... .. (4)2.1 物流概述 ........................................................................... (4)2.1.1 现代物流概念 ........................................................................... ...................................... 4 2.1.2 物流系统的概念及特点 ........................................................................... ................ 5 2.1.3 物流系统的主要问题 ................................................................................................. 6 2.2 生产物流概述 ........................................................................... .. (6)2.2.1 生产物流的含义 ........................................................................... ................................ 6 2.2.2 生产物流的特点 ........................................................................... ................................ 7 2.2.3 生产物流的布置 ........................................................................... ................................ 7 2.2.4 生产物流优化的内容 ........................................................................... ................... 11 2.2.5 生产物流优化的目标 ........................................................................... ................... 12 2.3 本章小结 ........................................................................... ......................................................... 12 第3章生产物流仿真技术及Flexsim仿真软件 (13)3.1 系统仿真的基础 ........................................................................... .. (13)III感谢您的阅读,祝您生活愉快。
飞机内襟翼运动机构多体动力学仿真分析模型王慧喻天翔崔卫民宋笔锋(西北工业大学航空学院西安,710072)摘要:本文在LMS b Motion平台上建立了几种飞机内襟翼运动机构多体运动学和动力学仿真分析模式,通过对比全刚性体仿真模型、基于滑轨柔性体仿真模型、基于襟翼柔性体仿真模型以及滑轨和襟翼均为柔性体仿真模型的分析结果,意在说明对飞机内襟翼等大型复杂运动结构建立多体动力学仿真模型的流程及方法,为下一步进行大型复杂运动机构运动学及动力学可靠性的分析和探讨提供计算仿真模型的依据。
关键词:内襟翼;多体动力学;仿真;Virtual Motion1、概述由于运动机构不仅要承受和传递载荷,而且还必须完成相应的运动功能,使得机构可靠性问题更具有特殊性,研究难度更大,是目前机械可靠性领域的一个薄弱环节。
一些大型复杂运动机构如襟缝翼运动机构、起落架收放机构等与飞机的安全性有着密切的关系,在其寿命周期内安全可靠地工作是飞机安全性分析与设计中必须要考虑的关键问题。
对于大型飞机上的复杂运动机构,有着复杂载荷环境和结构特性,例如民机的襟翼与滑轨等的支撑机构都固定在机翼上,在飞行过程中,机翼、襟翼和滑轨的变形量都很大(特别对于大型飞机,例如伊尔76的翼尖的最大变形达到1m,某襟翼滑轨的最大变形达到20cm),因此,必须要考虑各种复杂的非线性因素、柔性因素和边界与结合部效应等因素,才能建立更符合工程实际的机构运动学和动力学计算机仿真模型。
同时这也是大型复杂运动机构概率分析的基础。
基于此本文拟针对某内襟翼运动机构,考虑其刚柔耦合特性,在LMS b平台上建立多体动力学运动学和动力学的仿真模型,通过探讨对复杂运动机构的建模处理模式,为进一步进行复杂运动机构概率分析方法研究提供依据。
2、内襟翼连接关系和边界条件分析在LMS Virtual. Lab Motion平台上将内襟翼CATIA CAD模型进行转换,使得该模型包含多个part部分,重新装配这些部件以便进行运动学及动力学仿真。
平衡吊的运动学与动力学仿真作者:** 指导老师:************ ***************1 绪论1.1 平衡吊的概要平衡吊是的主要结构是平行四边形连杆机构的放大形态和螺母升降结构,通过外力的作用下达到重物的上升和下降的目的,平衡吊可以满足重物随时停留在需要的工作区域。
比其他的吊装设备更具有优越性,它比一般吊装设备更加的灵活,从而更加的精准,与机械手相比等其他吊装设备比,其结构更加得合理,性能较好,广泛的使用于重工业的生产中,在机床厂中更是被用作吊装作业,在小型企业装卸货物,例如码头的施工,集装箱的搬运,非常适合于作业区域窄,时间间隔短的作业方式。
其极大减少了人力使用,有效地节约了人力资源。
平衡吊在市场上主要常见的有3 种,机械式,气动式,液压式,机械式,顾名思义,通过外力的使用,使其达到升降的目的,主要在生产,搬运的的领域中常见,后期,更是添加了电动装置,优化了他的配置,有效地提高了生产效率。
气动式平衡吊主要是对于气压的控制原理实现升降功能的我们成为气动式平衡吊,液压式,主要是根据液压系统来设置的,在大多数重工业生产地使用广泛。
现在主要使用的为气动式平衡吊,主要省力,都是自动化进行的,按照平衡吊臂的类型还可以将平衡吊分为通用和专用类型,他们各有各的特色,相对于大型的吊车来说,其缺点是工作的行程围较小,区域局限化。
平衡吊的种类及其特点:液压平衡吊的特点:液压平衡吊有3 大类,有级,单级,无级变速的,他们通过不同的油路控制来达到不同的工作地点;气动平衡吊的特点:体积不大,比一般的平衡吊具有灵活的特色;电动平衡吊:又称为机械式平衡吊,具有控制重物在任意指定地点的特点,一般为定速转动;Cad(2D)+solidworks(3D) 图纸整套免费获取,需要的加QQ11624013871.2 平衡吊的结构平衡吊主要有大小臂,起重臂,短臂,电机,立柱,丝杆螺母传动副构成的,其中的几个臂件通过平行四边形连杆机构构成的。
在外力的作用下起到升降重物的作用。
1.3 平衡吊存在的缺陷以下是平很吊仍旧存在的一些缺陷,我们根据国外的吊装装置进行了对比,后期需要集中地优化和处理,产品的质量稳定性一直是个广泛受关注的焦点,国的产品一直较国外的稳定系差距很大,极影响了使用的期限,出产的配件较少,我国的平衡吊的吊钩部分仅为吊钩,虽然可佩手抓机构,由缺少配件极大了使得生产灵活性受到了限制。
平衡吊在安装的途径,设计的流程,可靠性能,外观和细节中和国外有很大的差距,其系列还不够完善,规格和种类相对较少,在特定的领域具有很大的局限性,在传动装置的设计方面不够理想,我国的标准型电动平衡吊为定速的升降速度,极降低了零部件的使用寿命,并极影响了使用和安全性。
气动,液压式虽然有无级和有级的变速,达到稳定性,控制性却很低,我们需要进一步的研究其控制性能,才能使其满足生产作业的需求。
2 平衡吊的设计以下部分主要是机构的选择和计算,包括对于整个装置的受力分析,得到相应的的数据,由得出的数据进行后续的SolidWorks 建模与动力学与运动学的仿真分析。
2.1 平衡吊的工作原理如图(a)(b)所示,吊钩处施加外力的作用可以带动物体使平行四边形连杆机构做水平方向左右往复运动,而电动机带动丝杆螺母机构进行上下往复运动,再由平行四边形连杆机构传递运动,进而控制吊钩处的物体上下运动,此外,,平行四边形连杆机构的上部分还可以通过立柱进行360 度的旋转,通过外力的作用下就可以使整个平衡吊装置处于一个较大围的立体工作区间,具有较高的工作效率,为作业提供了较高的便利。
图£ L(a)电动平紙用外规塑辆Bl Wl2,Ut>}电动平衛用外规简18平衡吊设计理念本就是在设计一个平衡机构,在不同的时间地点他能随时保持平衡。
平衡吊的平行四边形杆件长度必须满足一定的比例要求,其平衡状态才有可能完成。
而这个最基本的条件是:平行四边形杆件满足杆长的比值相同,即:AD/AB=DF/DE=mm为平行四边形机构的比例因数。
由上公式可得在平衡吊在工作区域的任意位置,忽略连杆的自重,摩擦力,连杆的承载变形,其他的一些客观因素,可以使其平衡状态得到实现。
在竖直导轨出杆件节点处上下的滑动,带动真个机构上下运动,固定竖直方向的运动,在水平向添加外力,带动吊钩F运动,其运动距离为x=X/m,外力消失的条件下,电机带动螺旋机构向上或者向下运动距离丫,吊重点F运动距离y,满足y=2Y/(m —1)。
以下证明上述的原理公式,以下的分析是在理想条件下进行的,忽略一切的摩擦力,杆的重力,连杆承受载荷后所受的变形等因素。
图2. 2机构运动简图以下分析图2.3的连杆机构杆件的受力情况,如图所示杆ABD,DEF在受力分析可得受到3个力的作用,由此可得为三力杆件,根据静力平衡原理,这三个力所受的合力为零,且三个力的作用线汇交与一点,而杆件BC,EC受到两个力的作用,且为二力杆件。
DEF在F点吊起物体,力的方向竖直向下,CE杆通过铰链E施加给DEF的力P的方向和CE的方向相同,G力和P力相交于K点,Q力的方向经过D 点和K点,已知重力G的大小和方向,Q力和P力的方向也知道,可知Q力和P力的大小。
图2.3连杆机构受力图同理可得ABD同样受到三个力的作用,根据作用力与反作用力的原理,DEF 对ABD 的作用力Q与Q力的方向相反,且处于同一条直线上,如图2.3所示,二力杆BC通过B点给ABD的作用力S沿着BC轴线方向,Q力和S力相交于J点,第三个力为固定铰链A对于ABD杆的支持力R力,R力必须通过J点,满足以下受力分析图。
已知Q力的大小和方向,S力的方向已知,有作图法可得R力和S力的大小和方向。
图2.4为ABD杆的受力分析图平衡吊必须达到平衡状态的主要条件是R力必须只受到竖直方向的力,将ABD杆和DEF杆的受力分析图综合到一起研究,以下是综合受力分析图4图2.5平衡吊的平行四边形连杆机构力的封闭图根据以上受力分析可得,当连杆装置满足过F点做一条轴向线FK和EC杆相交于K 点,在连接K,D两点,并与BC杆相交于J点,但J点恰好过A点的轴向线,可以满足R 力竖直向下。
机构需要满足下列的几何条件:△ KEF s^ABJ ,△ KDE DJB 根据三角形相似比的原理可得以下比例公式:AB/BJ=KE/EF ,KE/DE=DB/JB由以上公式联立可得:AB/BD=DE/EF经以上推倒可得:△ ABC s △ CEF,可得AC // CF又因为AC和CF有公共点C,可得A,C,F三点共线,AC=(m-1)CF;22平衡吊的运动分析平衡吊的运动由横轴向,纵轴向组成,以下单独对两个方向的装置的运动状态进行分析2.2.1对装置横轴向状态的计算进行运动分析,当A点不动时,水平移动C点,看F点的运动轨迹是怎样变化。
如图2.5所示,过C点做一条水平直线MN,A点与F点的投影在这条直线上分别为,M,N两点。
对C点进行平移,平移后为C点,F点则平移至F'点,同样得到A,F' ,C共线,F'点在MN上的投影为N'点。
在C点左右水平移动之前有:FEC s^CBA,CE/AB=EF /BC=FC/CA=m —lAFNAMC,FC/CA=FN /AM= m —l 所以有FN= (m-1) *AMC点移动后有:△F' E'SA C B' A, C' E' /A' B' =E' F' /B' C =F' Cl /C' A = mF' C' /C' A=F' N' 殛=吊N' (m-1) *AM所以可得:F'N'= FN可证明当C点做水平方向移动时,C点也是沿着水平方向移动的,△ AFF s△AC C,得:FF' =m*CC所以可得当F点做水平方向匀速直线运动的时候,C点也随着F点做匀速直线运动,且F 点的速度是C点速度的m倍;2.2.2:对装置纵轴向状态的计算当A点运动时,F点的运动轨迹,C点固定住,A点移动到A'点的位置上,由图可得F' ,C,A处于同一条直线上,过C点做一条水平线MN,可得FN丄MN,△CFE s^ ACB,CF/AC=EF/BC=m-1同理:△ CNF s^CMA,CN/CM=CF/AC=m-1再对F点的位置变化进行分析,以上公式可以推导出厶CNF CMA,即NF'// MA ,F点一直在竖直方向上运动,由公式厶CNF CMA可得到FF'/AA =m1,即卩F点的竖直方向速度是A点速度的m-1倍,当A点做匀速运动的条件下,F 点也是做匀速直线运动的,且F点的位移是是A点位移的m-1倍。
在以上的的计算中可以看出:再设计过程中m 的取值直接影响到平衡吊的结构,与平衡吊的建模有着密切的关系,一般的m的取值围为5到10之间,但m的取值不易过大或者过小,过小会造成工作围较小,过大会导致各杆件受力不均匀,出现倒伏的现象。
该平衡吊的吊钩处悬挂重载荷,m的取值相对较小,取6,从而使其结构更加的紧凑,符合其作业要求。
2.3平衡吊的设计流程平衡吊设计主要步骤为,机构的选取,分析及选取合适材料,加以计算,根据材料及其机构的配合确定最后方案,检验是否合适。
1•连杆机构的设计一整理基本布局图一计算各部分铰链所受的力一杆件的材料的选择-截面尺寸与杆件长度的选择一再进行校核验算-确定杆的配重及质心的位置2. 丝杆螺母的设计-对螺母受力分析及其计算 -螺母的设计-螺母的校核-选择合适的外力3. 将两个设计流程联合起来,所得到的数据进行SOLIDWORKS 建模2.3.1 平行四边形连杆机构的设计以下图示是机构的作业简化图,由图示可以清楚地求出作业的工作区域,吊钩处的最大和最小移动距离,整个连杆机构的运动状态可以精准的看出来,包括各杆件在上下左右移动时候的角度变化趋势,对以下建立模型时提供了直观的运动体系,方便了建模时的尺寸的计算出错等。
根据查阅的资料得出一般IT平衡吊的工作区域为:s=1800,z=1500吊钩在悬挂重物的条件下上升的速度为6米每秒,根据力学平衡的原理分析已知:A,C,F三点共线,AF/AC=FF /CC =m=6;当A点固定的情况下,重物点F水平方向上移动,则C点也会沿着水平方向上移动,重物点F的距离和C点呈现m倍的关系,水平移动的距离S=1800mm理论上可在水平导向槽里移动300mm的距离;同理,当C点固定不动时,重物F在上升或下降的移动中,A点也会随着F的轨迹移动,方向相同大小不等,他们的关系呈现为F是A的m-1倍,即竖直移动的距离z=1500mm,理论上竖直导向槽的距离为300mm。