2010飞思卡尔电磁组赛道检测
- 格式:pdf
- 大小:745.43 KB
- 文档页数:23
精品文档电磁组竞赛车模路径检测设计参考方案(竞赛秘书处2010-1,版本 1.0)一、前言第五届全国大学生智能汽车竞赛新增加了电磁组比赛。
竞赛车模需要能够通过自动识别赛道中心线位置处由通有100mA 交变电流的导线所产生的电磁场进行路径检测。
除此之外在赛道的起跑线处还有永磁铁标志起跑线的位置。
具体要求请参阅《第五届智能汽车竞赛细则》技术文档。
本文给出了一种简便的交变磁场的检测方案,目的是使得部分初次参加比赛的队伍能够尽快有一个设计方案,开始制作和调试自己的车模。
本方案通过微型车模实际运行,证明了它的可行性。
微型车模运行录像参见竞赛网站上视频文件。
二、设计原理1、导线周围的电磁场根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。
智能汽车竞赛使用路径导航的交流电流频率为20kHz,产生的电磁波属于甚低频(VLF)电磁波。
甚低频频率范围处于工频和低频电磁破中间,为3kHz~30kHz,波长为100km~10km。
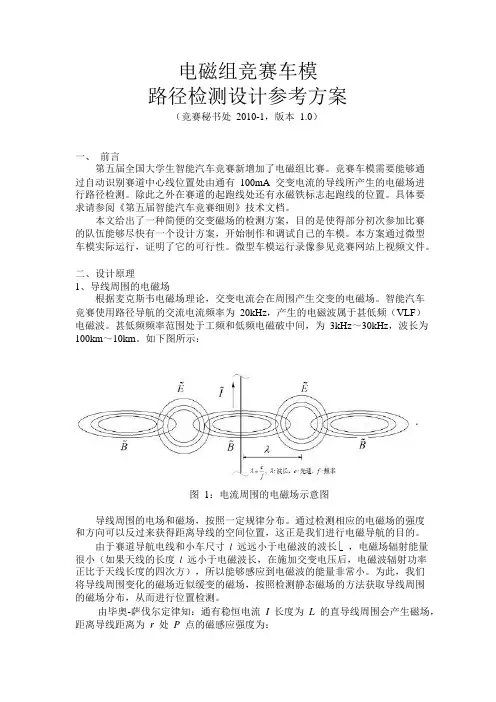
如下图所示:图1:电流周围的电磁场示意图导线周围的电场和磁场,按照一定规律分布。
通过检测相应的电磁场的强度和方向可以反过来获得距离导线的空间位置,这正是我们进行电磁导航的目的。
由于赛道导航电线和小车尺寸l远远小于电磁波的波长 ,电磁场辐射能量很小(如果天线的长度l远小于电磁波长,在施加交变电压后,电磁波辐射功率正比于天线长度的四次方),所以能够感应到电磁波的能量非常小。
为此,我们将导线周围变化的磁场近似缓变的磁场,按照检测静态磁场的方法获取导线周围的磁场分布,从而进行位置检测。
精品文档由毕奥-萨伐尔定律知:通有稳恒电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为:精品文档图 2 直线电流的磁场⎝1 4 r由此得: B = cos⎝4 r对于无限长直电流来说,上式中⎝1 = 0 ,⎝ 2 = ,则有B = (1)。
图3:无限长导线周围的磁场强度在上面示意图中,感应磁场的分布是以导线为轴的一系列的同心圆。

飞思卡尔智能车电磁组分区算法介绍写在之前的话:1、⽬前我是⼀名在校学⽣,这也是我第⼀次写博客,不周之处,请多谅解;2、此算法并⾮原创,借鉴⾃⼭东德州学院第⼋届⽩杨队(PS:个⼈看法,对于⼀些⼈把别⼈的开源东西改头换⾯⼀下就说是⾃⼰的原创⾏为⼗分鄙视);3、对于此算法的理解和说明并⾮纸上谈兵,算法已经被我运⽤到了⼩车⽐赛中并取得好的成绩(具体就不多说了,⽐赛时车莫名其妙坏了,⽐赛前调试的速度绝对能进国赛,⽐较遗憾),总之这算法是我尝试过的最好的算法;4、这⼀次所介绍的只是路径算法和⼀些知识普及,后⾯有时间会介绍其余部分算法及许多好的思路(舵机电机控制思路(不只是简单的PID),双车策略);5、希望对于这⽅⾯有涉及的⼈能与我联系并交流或指出不⾜之处。
---------------------------------------------------------------分割线-----------------------------------------------------------------------------⼀、没有这⽅⾯了解的可以看看 飞思卡尔智能车分为三组:摄像头、光电、电磁,我做的是电磁车,三种车队区别在于传感器的不同,所以获得路径信息的⽅法也不⼀样,摄像头和光电识别的是赛道上的⿊线(⽩底赛道),⽽电磁车则是检测埋在赛道下的通⼊100mh电流的漆包线,摄像头和光电采⽤的是摄像头和ccd作为传感器,电磁则是⽤电感放在漆包线周围,则电感上就会产⽣感应电动势,且感应电动势的⼤⼩于通过线圈回路的磁通量成正⽐,⼜因为漆包线周围的磁感应强度不同,因此不同位置的电感的感应电动势就不同,因此就可以去确定电感位置;因此在车⼦前⾯设置了50cm的前瞻,电感布局如下(怎么发不了图⽚):分为两排,前排3个,编号0,1,2(前期还加了两个竖直电感⽤来帮助过直⾓弯,后来改为了⼋字电感);后排2个,编号3,4;现在车⼦获得了不同位置的感应电动势的⼤⼩了,但这些值是不能处理的:1、感应电动势太微弱;2、是模拟信号,信号太微弱就放⼤它;这就涉及到模拟电路的知识了,就不多说了(因为要把这讲完到PCB绘制的篇幅就⾜够写另开⼀号专门写这些⽅⾯来(PS:题外话(我的题外话⽐较多)):放⼤部分外围你设计的再好也抵不过⼀个更好的芯⽚,有两个例⼦,⼀个是我⾃⼰的:之前⽤的是NE5532,但是效果不理想,加了好多什么滤波,补偿,都⽤上,没⽤,软件⾥处理后⾯再说,后来⼀狠⼼换了AD620,感觉像是春天来了,因为它是仪⽤放⼤器,还有就是贵。
2016目录第十一届竞赛规则导读说明.......................... 错误!未定义书签。
一、前言.......................................... 错误!未定义书签。
二、比赛器材...................................... 错误!未定义书签。
1、车模 ....................................... 错误!未定义书签。
(1)车模的种类............................ 错误!未定义书签。
(2)车模修改要求.......................... 错误!未定义书签。
2、电子元器件 ................................. 错误!未定义书签。
(1)微控制器.............................. 错误!未定义书签。
(2)传感器................................ 错误!未定义书签。
(3)伺服电机.............................. 错误!未定义书签。
3、电路板 ..................................... 错误!未定义书签。
4、编程语言及调试工具 ......................... 错误!未定义书签。
三、比赛环境...................................... 错误!未定义书签。
1、赛道 ....................................... 错误!未定义书签。
(1)赛道材质.............................. 错误!未定义书签。
(2)赛道尺寸、形状、间距.................. 错误!未定义书签。
(3)赛道引导方式.......................... 错误!未定义书签。
满足磁导航智能车信号检测的调理电路设计磁导航组是即将举办的2010年第五届全国大学生飞思卡尔杯智能汽车竞赛中首次引入,新赛制规定,在赛道中心线下铺设漆包线,其中通有f=20 kHz,I=100 mA 的交变电流,频率为(202)kHz,电流为50~150 mA,要求电磁组不允许通过获取道路的光学信息进行路径检测,只能通过检测漆包线周围的磁场来引导小车沿着载流线行驶。
从工作频率、输出信号的大小、器件成本、磁场强度等方面综合考虑,最适合用于磁导航赛道检测的传感器就是感应线圈。
检测线圈安装在智能车体上后,智能车前进过程中线圈与导航载流线之间的空间方位决定了线圈输出的感应电动势,再配接适当的信号调理电路,将检测线圈输出的电信号经过放大、检波等处理,最终转换为智能车单片机能接收的信号,为智能车提供导航依据,这是磁导航智能车能够正确寻道、高速行进的重要基础性工作。
而到目前为止,磁导航的检测研究还很少,本文将对检测线圈配接的信号调理电路进行探讨。
1 检测线圈中的感应电动势由于比赛用车的尺度远小于赛道长度,可将载流导线近似看作无限长直导线。
载流长直导线周围的磁感应线是以导线为轴的同心圆环,B的方向为电流i的右螺旋切向,距离导线a的P点磁感应强度式中0为真空磁导率,i为直导线中的交变电流,以正弦电流激励(若为非正弦波,可看作是一系列正弦波的线性迭加),i=Ipsin2ft,故B为交变磁场,通过放置在导线周围的检测线圈将交变磁场转化为感应电动势。
假设在载流导线正上方竖直放置面积为S,匝数为N的矩形检测线圈,此时磁感应强度与线圈平面垂直,以线圈中心P点处的磁感应强度可估算出通过线圈的磁通量式(4)表明,当线圈绕制成型后,线圈匝数Ⅳ和面积S已确定。
检测线圈输出的感应电动势还与激励电流的幅值,Ip和频率f成正比。
赛制规定的激励电流频率为(202)kHz,变化不超过10%。
但电流范围50~150 mA,变化可达3倍,这将对线圈输出的感应电动势产生很大影响。
电磁组竞赛车模路径检测设计参考方案(竞赛秘书处2010-1,版本 1.0)一、前言第五届全国大学生智能汽车竞赛新增加了电磁组比赛。
竞赛车模需要能够通过自动识别赛道中心线位置处由通有100mA 交变电流的导线所产生的电磁场进行路径检测。
除此之外在赛道的起跑线处还有永磁铁标志起跑线的位置。
具体要求请参阅《第五届智能汽车竞赛细则》技术文档。
本文给出了一种简便的交变磁场的检测方案,目的是使得部分初次参加比赛的队伍能够尽快有一个设计方案,开始制作和调试自己的车模。
本方案通过微型车模实际运行,证明了它的可行性。
微型车模运行录像参见竞赛网站上视频文件。
二、设计原理1、导线周围的电磁场根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。
智能汽车竞赛使用路径导航的交流电流频率为20kHz,产生的电磁波属于甚低频(VLF)电磁波。
甚低频频率范围处于工频和低频电磁破中间,为3kHz~30kHz,波长为100km~10km。
如下图所示:图1:电流周围的电磁场示意图导线周围的电场和磁场,按照一定规律分布。
通过检测相应的电磁场的强度和方向可以反过来获得距离导线的空间位置,这正是我们进行电磁导航的目的。
由于赛道导航电线和小车尺寸l远远小于电磁波的波长 ,电磁场辐射能量很小(如果天线的长度l远小于电磁波长,在施加交变电压后,电磁波辐射功率正比于天线长度的四次方),所以能够感应到电磁波的能量非常小。
为此,我们将导线周围变化的磁场近似缓变的磁场,按照检测静态磁场的方法获取导线周围的磁场分布,从而进行位置检测。
由毕奥-萨伐尔定律知:通有稳恒电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为:B = +sin ⎝ d ⎝ (⎧0 = 4 ⋅10 7 TmA 1 ) ( cos ⎝1 2 ) 。
4 r图 2 直线电流的磁场⎝1 4 r 由此得: B = cos ⎝ 4 r对于无限长直电流来说,上式中⎝1 = 0 ,⎝ 2 = ,则有 B = (1)。
第十届"飞思卡尔"杯全国大学生智能汽车竞赛技术报告第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:电子科技大学摘要本文设计的智能车系统以MK60DN512ZVLQ10微控制器为核心控制单元,通过CMOS摄像头检测赛道信息,使用模拟比较器对图像进行硬件二值化,提取黑色引导线,用于赛道识别;通过编码器检测模型车的实时速度,使用PID控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
关键字:MK60DN512ZVLQ10,CMOS,PIDAbstractIn this paper we will design a smart car system based on MK60DN512ZVLQ10as the micro-controller unit. We use a CMOS image sensor to obtain lane image information. Then convert the original image into the binary image by the analog comparator circuit in order to extract black guide line for track identification. An inferred sensor is used to measure the car`s moving speed. We use PID control method to adjust the rotate speed of driving electromotor and direction of steering electromotor, to achieve the closed-loop control for the speed and direction.Keywords: MK60DN512ZVLQ10,CMOS,PID目录摘要 (II)Abstract (III)目录............................................................................................................................ I V 引言.. (1)第一章系统总体设计 (2)1.1系统概述 (2)1.2整车布局 (3)第二章机械系统设计及实现 (4)2.1智能车机械参数调节 (4)2.1.1 前轮调整 (4)2.1.2其他部分调整 (6)2.2底盘高度的调整 (7)2.3编码器的安装 (7)2.4舵机转向结构的调整 (8)2.5摄像头的安装 (9)第三章硬件系统设计及实现 (11)3.1 MK60DN512ZVLL10主控模块 (12)3.2电源管理模块 (12)3.3 摄像头模块 (14)3.4电机驱动模块 (15)3.5测速模块 (16)3.6陀螺仪模块 (16)3.7灯塔检测模块 (16)3.8辅助调试模块 (17)第四章软件系统设计及实现 (19)4.1赛道中心线提取及优化处理 (19)4.1.1原始图像的特点 (19)4.1.2赛道边沿提取 (20)4.1.3推算中心 (21)4.1.4路径选择 (23)4.2 PID 控制算法介绍 (23)4.2.1位置式PID (24)4.2.2增量式PID (25)4.2.3 PID参数整定 (25)4.3转向舵机的PID控制算法 (25)4.4驱动电机的PID控制算法 (26)第五章系统开发及调试工具 (27)5.1开发工具 (27)5.2上位机图像调试 (27)5.3SD卡模块 (27)5.3.1SD卡介绍 (27)5.3.2 SPI总线介绍 (28)5.3.3软件实现 (28)第六章模型车的主要技术参数 (30)结论 (31)参考文献 (I)附录A:电原理图 (II)附录B:程序源代码................................................................................................... I V引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。

最近很多人问光电车如何检测起跑线,是红外管还是ccd,ccd需不需要另外加多一个。
其实我很想说,如果不清楚不行是实践说的话常识一下就行了,行话的,理论是辅助自己更好去实践的,并非事实就是这样,太多的因素我们无法理论推理!在这里分享一下我检测起跑线的一些经验:1、我的CCD是检测跳变沿来识别黑线的,一开始观察到当车经过起跑线的时候,是可以检测到6个跳变沿的,在其他任何的地方都不会检测到这么多的跳变沿,这是我开始检测的简单方法。
这里检测跳变沿的阈值很关键,有一个范围,动态的,其实如果你能保证每一次检测都不会检测不到或者误判黑线这6个跳变沿是没问题的。
阈值方面属于检测黑线的范围就不多说了。
2、上面检测六个跳变沿一直用的很准确的,但是当速度上到1.8以上的时候偶尔就检测不到,常识降低阈值,还行,勉强提取黑线和起跑线都没有问题。
(在这里发现如果速度继续加快的话方法就会检测不到了)3、速度要继续提高,没有办法了,想到用红外对管,不过由于是直立车,车身的角度不能很好的保持,红外对管不调制过的话距离太短,更重要的是,过障碍和坡度的时候肯定会卡到或者误判。
想着想着发现极为纠结的红外,不靠谱。
4、接着就考虑从CCD下手,加多一个CCD?加多一个的话让他斜着放速度就算是3.0还是可以检测的,不过不仅在车身重心增高,代码的时序要求更严格了,检修和维护的困难都会增加。
pass.5、最后我的决定是,减小曝光时间,增加CCD检测的周期,之前是9ms的周期,现在继续缩短,6ms。
经过测试认证,巡线白天依然毫无压力,晚上实验室灯全开,全程偶尔会有十来个6ms周期丢线之外其他地方都还ok。
起跑线检测目前还没有出现误判漏判的i情况。
以上是我在弄起跑线的一个过程,希望能帮助到有需要的的车友。
PS:送上我做车的重要心得体会:大胆的打破常局去实践才是王道,即使理论明明说是错误的,你也可以去尝试。
信心、创新、实践。
第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告摘要本文以第十届全国大学生智能车竞赛为背景,介绍了基于电磁导航的智能赛车控制系统软硬件结构和开发流程。
该系统以Freescale半导体公司32 位单片机MK60DV510ZVLQ100为核心控制器,使用IAR6.3程序编译器,采用LC选频电路作为赛道路径检测装置检测赛道导线激发的电磁波来引导小车行驶,通过增量式编码器检测模型车的实时速度,配合控制器运行PID控制等控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
同时我们使用集成运放对LC选频信号进行了放大,通过单片机内置的AD采样模块获得当前传感器在赛道上的位置信息。
通过配合Visual Scope,Matlab等上位机软件最终确定了现有的系统结构和各项控制参数。
实验结果表明,该系统设计方案可使智能车稳定可靠运行。
关键字:MK60DV510ZVLQ100,PID控制,MATLAB,智能车第十届全国大学生智能汽车邀请赛技术报告目录第一章引言 (5)第二章系统方案设计 (6)2.1系统总体方案的设计 (6)2.2系统总体方案设计图 (6)电磁传感器模块 (7)控制器模块 (7)电源管理模块 (7)编码器测速模块 (7)舵机驱动模块 (8)起跑线检测模块 (8)人机交互模块 (8)测距模块 (8)第三章机械结构调整与优化 (8)3.1智能车前轮定位的调整 (8)主销后倾角 (9)3.1.2主销内倾角 (9)3.1.3 前轮外倾角 (10)3.1.4 前轮前束 (10)3.2 舵机的安装 (11)3.3编码器安装 (12)3.4车体重心调整 (12)3.5传感器的安装 (13)3.6测距模块的安装 (14)第四章硬件电路设计 (15)4.1单片机最小系统 (15)4.2电源管理模块 (16)4.3电磁传感器模块模块 (17)4.3.1 电磁传感器的原理 (17)4.3.2 信号的检波放大 (18)4.4编码器接口 (19)4.5舵机驱动模块 (20)4.6电机驱动模块 (20)4.7人机交互模块 (21)第五章控制算法设计说明 (22)5.1主要程序流程 (22)5.2赛道信息采集及处理 (23)5.2.1 传感器数据滤波及可靠性处理 (23)5.2.2 位置偏差的获取 (25)5.3 控制算法实现 (27)5.3.1 PID算法原理简介 (27)5.3.2基于位置式PID的方向控制 (31)5.3.3 基于增量式PID和棒棒控制的速度控制 (31)5.3.4 双车距离控制和坡道处理 (33)第六章系统开发与调试 (34)6.1开发环境 (34)6.2上位机显示 (35)6.3车模主要技术参数 (36)第七章存在的问题及总结 (37)7.1 制作成果 (37)7.2问题与思考 (37)7.3不足与改进 (37)参考文献 (38)附录A 部分程序代码 (39)第十届全国大学生智能汽车邀请赛技术报告第一章引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
第十届飞思卡尔杯智能车竞赛规则解读
根据官方公布最新规则,第十届飞思卡尔杯智能车竞赛仍然分为摄像头组、光电组和电
磁组,赛道类型仍然与往届相似。
规则中变化的内容有:摄像头组采用C型双电机车模,以四轮着地形式运动;光电组采用D型双电机车模或者E型双电机车模,以两轮直立形式运动;电磁组采用B型单电机车模,以两车跟随形式运动。
竞赛仍然指定使用飞思卡尔16位处理
器XS128、32位Cortex M4处理器K60/K10,32位Cortex M0处理器KL25等作为主处理器。
现以组别类型、处理器类型以及循迹传感器类型分类,制作第十届飞思卡尔智能车竞
赛各组别配件清单,仅供参考。
飞思卡尔智能车电磁组程序员成长之路1.飞思卡尔智能车小车入门智能汽车电磁组简介:第五届全国大学“飞思卡尔杯”智能汽车竞赛新增加了“电磁组”。
根据比赛技术要求,电磁组竞赛,需要选手设计的智能车能够检测到道路中心线下电线中20KHz 交变电流产生的磁场来导引小车沿着道路行驶o在平时调试和比赛过程中需要能够满足比赛技术要求的20KHz的交流电源驱动赛道中心线下的线圈。
同时参赛选手需要自行设计合适的电磁传感器来检测赛道信息完成智能寻迹功能。
智能车制作是一个涵盖电子.电气、机械.控制等多个领域和学科的科技创新活动。
简单点来说可以将其分为硬件电路(包括电源.MUC控制部分、电机驱动、传感器)、机械、算法三方面的设计。
电磁组在机械方面可以参照光电组的设计方案,这里不再赘述。
本设计指导只讲述20KHZ电源.电磁传感器设计方案以及部分算法。
智能车对单片机模块需求:人多数0思卡尔的单片机都能满足要求,对参数选「來说抓紧选择一个熟悉的芯片I.手,左做算法调试。
飞思卡尔单片机资源:单片机推君主频IO AD PWM SPI10中斷PIT DMA S度S12840M8716CH8CH1204无K60100/120/150M10416353104415KL2548M6716,1x141X6+2X216724软多CF525 580M100881424低MPC5 60440/64M1061320432416CH低电磁组电磁组芯片电机双电机四路PW控制转向舵机一路「叫"控制路径识别传感器电磁传感器若干路AD采集速股采集编码器商路脉冲计数或10 中断其他传感器起跑线识别中断采集避障超声波雷达若干AD采集机披控制方案摇头舵机P叫控制参数设宜按键10控制交互界面OLED显示SPI或者10模拟智能车程序框架:智能车涉及到10模块,中断模块,PWM 模块,DMA 模块,AD 模块等。
在车模调试中 还有必须的模块。
如SCI 模块、定时器模块,SPI 模块等。