钻井平台设备 图解 1
- 格式:doc
- 大小:1.65 MB
- 文档页数:14

自升式钻井平台由平台、桩腿和升降机构组成,平台能沿桩腿升降,一般无自航能力。
工作时桩腿下放插入海底,平台被抬起到离开海面的安全工作高度,并对桩腿进行预压,以保证平台遇到风暴时桩腿不致下陷。
完井后平台降到海面,拔出桩腿并全部提起,整个平台浮于海面,由拖轮拖到新的井位中海油63号自升式钻井平台2008年全球共有自升式钻井平台(Jackup)446座,分布在南美、北美、亚洲、非洲、欧洲、澳洲各地。
设计水深一般为10米(30英尺)到250米(750英尺)以内,属近海海域。
它们主要集中建造于1980~1983年,之后的建造数量特别少,使用年限基本上在20~30年,而在役的自升式钻井平台船龄大多数超过25年。
因此,该类钻井平台未来更新换代的需求比较大。
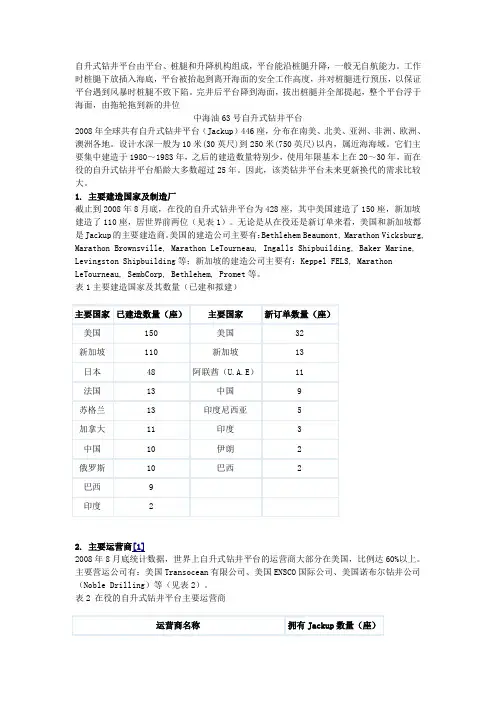
1. 主要建造国家及制造厂截止到2008年8月底,在役的自升式钻井平台为428座,其中美国建造了150座,新加坡建造了110座,居世界前两位(见表1)。
无论是从在役还是新订单来看,美国和新加坡都是Jackup的主要建造商。
美国的建造公司主要有:Bethlehem Beaumont, Marathon Vicksburg, Marathon Brownsville, Marathon LeTourneau, Ingalls Shipbuilding, Baker Marine, Levingston Shipbuilding等;新加坡的建造公司主要有:Keppel FELS, Marathon LeTourneau, SembCorp, Bethlehem, Promet等。
表1主要建造国家及其数量(已建和拟建)2. 主要运营商[1]2008年8月底统计数据,世界上自升式钻井平台的运营商大部分在美国,比例达60%以上。
主要营运公司有:美国Transocean有限公司、美国ENSCO国际公司、美国诺布尔钻井公司(Noble Drilling)等(见表2)。
表2 在役的自升式钻井平台主要运营商在新订单方面,美国Vantage Energy公司持有14艘,居世界第一位,其次是美国Rowan 公司持有9艘,而中国油田服务有限公司以7艘订单位居第三位。
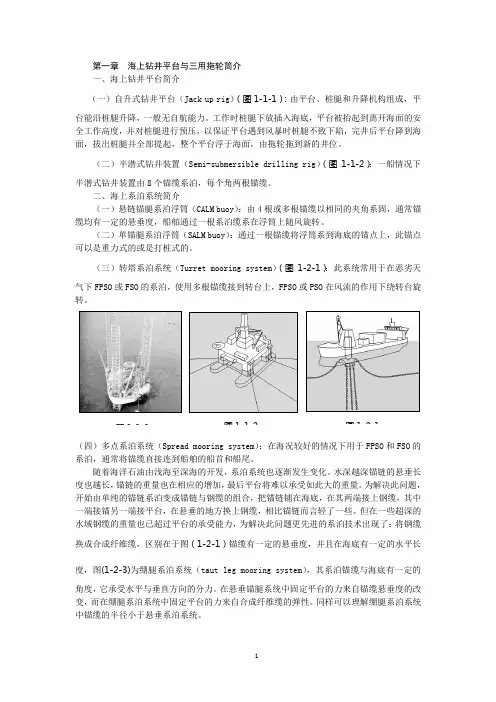
第一章 海上钻井平台与三用拖轮简介一、海上钻井平台简介(一)自升式钻井平台(Jack up rig )(图1-1-1):由平台、桩腿和升降机构组成,平台能沿桩腿升降,一般无自航能力。
工作时桩腿下放插入海底,平台被抬起到离开海面的安全工作高度,并对桩腿进行预压,以保证平台遇到风暴时桩腿不致下陷,完井后平台降到海面,拔出桩腿并全部提起,整个平台浮于海面,由拖轮拖到新的井位。
(二)半潜式钻井装置(Semi-submersible drilling rig )(图1-1-2):一船情况下半潜式钻井装置由8个锚缆系泊,每个角两根锚缆。
二、海上系泊系统简介(一)悬链锚腿系泊浮筒(CALM buoy ):由4根或多根锚缆以相同的夹角系固,通常锚缆均有一定的悬垂度,船舶通过一根系泊缆系在浮筒上随风旋转。
(二)单锚腿系泊浮筒(SALM buoy ):通过一根锚缆将浮筒系到海底的锚点上,此锚点可以是重力式的或是打桩式的。
(三)转塔系泊系统(Turret mooring system )(图1-2-1):此系统常用于在恶劣天气下FPSO 或FSO 的系泊,使用多根锚缆接到转台上,FPSO 或PSO 在风流的作用下绕转台旋转。
(四)多点系泊系统(Spread mooring system ):在海况较好的情况下用于FPSO 和FSO 的系泊,通常将锚缆直接连到船舶的船首和船尾。
随着海洋石油由浅海至深海的开发,系泊系统也逐渐发生变化。
水深越深锚链的悬垂长度也越长,锚链的重量也在相应的增加,最后平台将难以承受如此大的重量。
为解决此问题,开始由单纯的锚链系泊变成锚链与钢缆的组合,把锚链铺在海底,在其两端接上钢缆,其中一端接锚另一端接平台,在悬垂的地方换上钢缆,相比锚链而言轻了一些。
但在一些超深的水域钢缆的重量也已超过平台的承受能力,为解决此问题更先进的系泊技术出现了:将钢缆换成合成纤维缆,区别在于图(1-2-1)锚缆有一定的悬垂度,并且在海底有一定的水平长度,图(1-2-3)为绷腿系泊系统(taut leg mooring system ),其系泊锚缆与海底有一定的角度,它承受水平与垂直方向的分力。
钻井设备- Swivel & Top driver前面我们已经知道了,钢丝绳穿过定滑轮组和动滑轮组,动滑轮组因此可以上下自由的运动。
但是问题出来了,上下垂直方面可以很方便的运动,但是我们钻井,还需要旋转的力,也就是钻杆是旋转的,我们的滑轮组不可能跟着一起转,否则之间的钢丝绳估计会绞得像麻花。
这是swivel的其中的一个作用,同时我们也知道,钻井需要钻井液,试着想一想,钻杆在哪里高速的旋转着,我们如何把钻井液-泥浆送到钻杆的中空的空间去呢?这是swivel的另外一个重要作用- 泥浆进入钻杆的最初的通道。
如下图,泥浆经高压软管—鹅颈管goose neck—进入swivel。
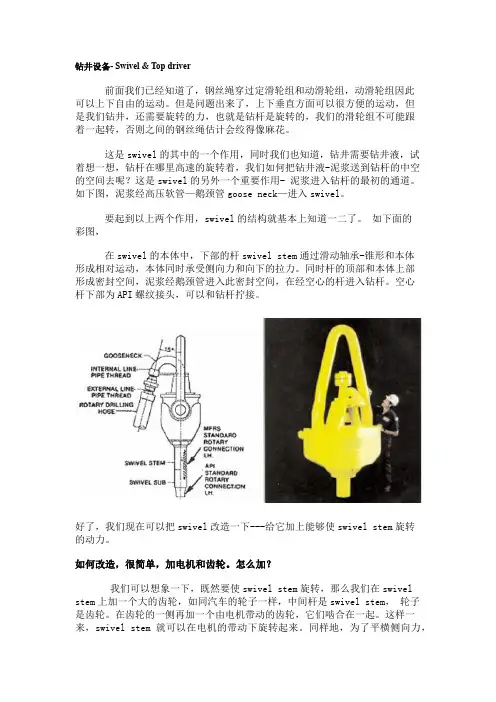
要起到以上两个作用,swivel的结构就基本上知道一二了。
如下面的彩图,在swivel的本体中,下部的杆swivel stem通过滑动轴承-锥形和本体形成相对运动,本体同时承受侧向力和向下的拉力。
同时杆的顶部和本体上部形成密封空间,泥浆经鹅颈管进入此密封空间,在经空心的杆进入钻杆。
空心杆下部为API螺纹接头,可以和钻杆拧接。
好了,我们现在可以把swivel改造一下---给它加上能够使swivel stem旋转的动力。
如何改造,很简单,加电机和齿轮。
怎么加?我们可以想象一下,既然要使swivel stem旋转,那么我们在swivel stem上加一个大的齿轮,如同汽车的轮子一样,中间杆是swivel stem,轮子是齿轮。
在齿轮的一侧再加一个由电机带动的齿轮,它们啮合在一起。
这样一来,swivel stem就可以在电机的带动下旋转起来。
同样地,为了平横侧向力,以及增加旋转的扭矩,在齿轮的另一侧也加一个电机带着的齿轮。
下图是齿轮箱:然后加上必要的润滑设施和结构部分,以及导向机构。
它有了一个新的名字Top driver,也叫power swivel。
很显然,Top driver与swivel的区别,swivel是它的一部分。
事实上,Top driver 要比上面写的复杂的多。

随着人类对油气资源开发利用的深化,油气勘探开发从陆地转入海洋。
因此,钻井工程作业也必须在浩瀚的海洋中进行。
在海上进行油气钻井施工时,几百吨重的钻机要有足够的支撑和放置的空间,同时还要有钻井人员生活居住的地方,海上石油钻井平台就担负起了这一重任。
由于海上气候的多变、海上风浪和海底暗流的破坏,海上钻井装置的稳定性和安全性更显重要。
目前的海上石油钻井平台可分为固定式和移动式两种。
固定式钻井平台大都建在浅水中,它是借助导管架固定在海底而高出海面不再移动的装置,平台上面铺设甲板用于放置钻井设备。
支撑固定平台的桩腿是直接打入海底的,所以,钻井平台的稳定性好,但因平台不能移动,故钻井的成本较高。
为解决平台的移动性和深海钻井问题,又出现了多种移动式钻井平台,主要包括:坐底式钻井平台、自升式钻井平台、钻井浮船和半潜式钻井平台。
坐底式钻井平台又称沉浮式或沉底式钻井平台,其上部和固定式钻井平台类似,其下部则是由若干个浮筒或浮箱组成的桁架结构,充水后,使钻井平台下沉坐于海底并处于工作状态,排水后,使钻井平台上浮可进行拖航和移位。
坐底式钻井平台多用于水浅、浪小、海底较平坦的海区。
自升式钻井平台是有多个(一般为3~4个)桩腿插入海底,并可自行升降的移动式钻井平台。
自升式钻井平台基本由两部分组成,一部分是可以安放钻井设备、器材和生活区的平台,另一部分是可升降并可插入海底的桩腿。
我国自行制造的自升式钻井平台“渤海一号”平台的四根桩腿是由圆形的钢管做成的,桩腿的高度有七十多米,升降装置是插销式液压控制机构。
该型钻井平台造价较低、运移性好、对海底地形的适应性强,因而,我国海上钻井多使用自升式钻井平台。
钻井平台桩腿的高度总是有限的,为解决在深海区的钻井问题,又出现了漂浮在海面上的钻井船。
钻井船的排水量从几千吨到几万吨不等,它既有普通船舶的船型和自航能力,又可漂浮在海面上进行石油钻井。
由于钻井船经常处于漂浮状态,当遇到海上的风、浪、潮时,必然会发生倾斜、摇摆、平移和升降现象,因此钻井船的稳定性是一个非常关键的问题。

bull nose:用来封住casing string的钢板(焊在下端部),球面形或半椭球形,像个牛鼻子。
有的直接用个带螺纹的塞子塞住的。
好像是用来做泥浆循环实验。
cathead:在drill floor上的cat head用来辅助吊sand line的,如下图红色的cat head,顶部的轮子下面有个液压泵,旁边的轮子可以像合页一样转动,用来调整拉拽的角度。
还应该有根钢丝,一端绕过旁边的轮子和顶部的轮子,固定在另一端(和旁边轮子对过的一边),使用的时候顶部的轮子在液压泵的推动下向上移动,钢丝的来拽距离是上面轮子移动距离的两倍。
这种形式的cathead目前广泛应用在平台和钻井船上。
cat walk:在船上的catwalk大家都知道的吧,在平台上也有类似的结构。
在钻井系统中指的是和vee-door下面的pipe ramp链接的窄长平台,用来运送钻井所需的工具、管子等这个图是陆地上catwalk。
图中是工人在上面选管子准备运到drill floor上。
dog house:dog house 又叫boiler house这个只有在陆地钻井时看的到,就是一个在拖车上的小房间,或是在卡车上分割出来的小房间。
里面摆放杂物或休息的地方,实在像个狗窝。
在陆地钻井的时候可以把设备、工具都装车上方便移动,就连derrick都可以装车上(横着放),运到指定地点后再竖起了。
在平台上和船上是没有的。
finger board:在derrick上用来扶持接好的drill pipe和coller的。
因形状像人的手指而得名。
这是陆地上的derrick。
在平台和钻井船上,finger board是在derrick的里面的。
见下图这些大手指上还有些小手指,管子运过来的时候会自动打开,(图中正在打开,管子放好后会关闭)有了这套系统,就不需要monkey board了。
这套系统既节省的大量时间,又不需要很多劳动力,据说可以提高25%的效率,而造价只占整个rig的1%。


固定式平台之混凝土钻井平台
文字概述
混凝土重力式平台的底部通常是一个巨大的混凝土基础(沉箱),用三个或四个空心的混凝土立柱支撑着甲板结构,在平台底部的巨大基础中被分隔为许多圆筒型的贮油舱和压载舱,这种平台的重量可达数十万吨,正是依靠自身的巨大重量,平台直接置于海底。
现在已有大约20座混凝土重力式平台用于北海。
图1、钻井平台及供给船
图2、钻井平台俯视图一(八角形处为直升机升降平台)
图3、钻井平台俯视图二(八角形处为直升机升降平台)
图4、钻井平台俯视图三(八角形处为直升机升降平台)。
大气,真是庞然大物!海洋石油钻井平台模拟
点击上面蓝色字体直观学机械关注我们
法律顾问:赵建英律师
大型海洋石油钻井平台都是下面这样的↓↓
走进一看都是这样的↓↓
钻井船↓↓
来个剖面图,巨帅↓↓
海洋钻井平台是主要用于钻探井的海上结构物。
平台上装钻井、动力、通讯、导航等设备,以及安全救生和人员生活设施,是海上油气勘探开发不可缺少的手段。
主要分为移动式平台和固定式平台两大类。
其中按结构又可分为:
(1)移动式平台:坐底式平台、自升式平台、钻井船、半潜式平台、张力腿式平台、牵索塔式平台。
(2)固定式平台:导管架式平台、混凝土重力式平台、深水顺应塔式平台。
下面是一个模拟海洋钻井平台的视频
友情提示,建议在wifi下欣赏,留着流量学知识!
End
来源:直观学机械整理,河南郑州的“Nirvana”先生提供资料,感谢
评论处大家可以补充文章解释不对或欠缺的部分,这样下一个看到的人会学到更多,你知道的正是大家需要的。
bull nose:用来封住casing string的钢板(焊在下端部),球面形或半椭球形,像个牛鼻子。
有的直接用个带螺纹的塞子塞住的。
好像是用来做泥浆循环实验。
cathead:在drill floor上的cat head用来辅助吊sand line的,如下图红色的cat head,顶部的轮子下面有个液压泵,旁边的轮子可以像合页一样转动,用来调整拉拽的角度。
还应该有根钢丝,一端绕过旁边的轮子和顶部的轮子,固定在另一端(和旁边轮子对过的一边),使用的时候顶部的轮子在液压泵的推动下向上移动,钢丝的来拽距离是上面轮子移动距离的两倍。
这种形式的cathead目前广泛应用在平台和钻井船上。
cat walk:在船上的catwalk大家都知道的吧,在平台上也有类似的结构。
在钻井系统中指的是和vee-door下面的pipe ramp链接的窄长平台,用来运送钻井所需的工具、管子等
这个图是陆地上catwalk。
图中是工人在上面选管子准备运到drill floor上。
dog house:dog house 又叫boiler house
这个只有在陆地钻井时看的到,就是一个在拖车上的小房间,或是在卡车上分割出来的小房间。
里面摆放杂物或休息的地方,实在像个狗窝。
在陆地钻井的时候可以把设备、工具都装车上方便移动,就连derrick都可以装车上(横着放),运到指定地点后再竖起了。
在平台上和船上是没有的。
finger board:在derrick上用来扶持接好的drill pipe和coller的。
因形状像人的手指而得名。
这是陆地上的derrick。
在平台和钻井船上,finger board是在derrick的里面的。
见下图这些大手指上还有些小手指,管子运过来的时候会自动打开,(图中正在打开,管子放好后会关闭)有了这套系统,就不需要monkey board 了。
这套系统既节省的大量时间,又不需要很多劳动力,据说可以提高25%的效率,而造价只占整个rig的1%。
fox hole:fox hole的作用类似mouse hole,都是放管子准备接起来的,区别在于他有slips,还有在结构方面,是下沉的,而且需要beam支撑,安装了slips后基本和drill floor平齐了。
一般是两个并排的,有的也有三个。
为什么要有slips?
有个这个可以实现自动化,它固定了管子的位置,roughneck可以准确的找到管子的位置,进行接管子。
一系列运管子,接管子,再运到fingerboard上都是电脑自动控制的。
设定好程序后操作人员就可以去喝咖啡了
monkey board:monkey board和finger board是在一起的,是个窄小的平台,工人可以在上面辅助取放管子的操作(tripping pipe)。
其高度离drill floor一般为35或40英尺(1ft=304.8mm),不同的井架上可能有所不同,但基本
都是大约在derrick的中部
这副图中可以看到人后面波浪线样的结构,是finger board上用来固定管子的。
现在在自动控制的体统中用的是像小手指一样的结构,装在大的手指上,可以转动(自动控制)。
mouse hole:mouse hole就是在drill floor的rotary table旁边简单的开个洞,下面有个套管,放钻管接头的。
Spider:一个放在rotary table 上的几座,里面是个锥形面,用来安装slips,和fox hole的slips一样用于抓住drilling pipe或casing pipe。
在接管子的时候提起方钻管,夹住下面的管子,然后由roughneck拧开方钻管,方钻管就会被移动到mouse hole上方去链接放在里面的joint也就是钻管,然后在移会rotary table接上去继续钻,同时另一根jiont又被放进mouse hole。
Roughneck:roughneck,铁钻工。
用来拧紧和拧开管子用的,rotary table上有一个。
foxhole 上也有一个。
这个图是ratary table上的roughneck。
从中也可以看出cathead的布置,其实有两个,沿ratary table 中心线对称。
仔细看roughneck旁边的drill floor能看到两边有两个沉下去的“池子”这里将来会装上木头,接好的管子就放这里,上面是对应的finger board。
接好的管子(钻管或钻环)就叫做sand line ,cathead就是拖拽这sand line的
Gooseneck:处在最顶端,用来连接stand pipe 和钻管的,随travelling block 移动,泥浆或水泥就是从软管经过这个gooseneck到drill pipe里的。
BOP-blowout preventer:用一个字解释BOP就是--阀。
从结构形式及工作原理来分主要有两类: ram and annular。
(闸板型,环形型)
典型闸板型:
关于bop 为什么需要bop?
为了防止井喷,井喷是件很危险的事情,当钻井钻到含气或含油层的时候,巨大的油气压力能把钻管泥浆等喷出来,破坏rig,污染环境,威胁工作人员的安全,甚至周围居民安全,喷出有毒气体(硫化氢)影响很大。
大家是否记得几年前中国哪来生井喷事故,大量的硫化氢气体泄露……
bop如何工作?
楼上图2中的9是在钻管还在井里的时候使用,4是在没有钻管的时候使用
它们都是是包裹橡胶的闸板,依靠液压推动来关闭和打开。
环形的也是橡胶,依靠液压动力推动挤压,达到封闭的目的
还有和bop配套的控制设备:气罐,泵,液压设备,控制开关,管路,阀,等。
bop响应时间?
环形bop的相应时间为60秒
闸板型bop的相应时间为30秒
什么时候关闭?
依靠监控井口压力的装置,判断是否需要关闭。
如果关闭后压力仍继续增大,剪断钻管也无法封住,就该通知rig上的人,开始逃跑了,在陆地的drill floor上有个滑滑梯就是紧急逃跑用的。
关闭后怎么办?
bop关闭后就开始使用chock and kill manifold ,MGS--mud gas separator
在平台上有两种:SBOP 和SSBOP
SSBOP--subsea bop是在海底的,实际应用时是把控制系统集成在一起组成SSBOP STACK要和LMRP配合使用,LMRP叠加在SSBOP上,上面在连接riser。
riser最上面是用MRT悬挂的telescopic jiont。
控制系统一般采取遥控的方式,同时还需要对bop进行监控(可以用ROV监控)。
SBOP--surface bop使用时要和SID(或SIS)配合使用,SBOP靠MRT悬挂在drill floor下面,SID和SSBOP类似是坐在在海底井口上的。
两者用riser连接。
SSBOP和LMRP
看看与陆基bop的区别:。