多变量模糊神经网络控制器的研究
- 格式:pdf
- 大小:229.20 KB
- 文档页数:4
倒立摆系统的设计摘要倒立摆是一个非线性、强耦合、多变量和自然不稳定的系统。
通过它能有效地反映控制过程中诸如可镇定性、鲁棒性、随动性以及跟踪等多种关键问题,是检验各种控制理论的理想模型。
对倒立摆系统的研究不仅具有很重要的理论意义,而且在航天科技和机器人学领域中也有现实指导性意义。
本文以直线二级倒立摆模型为控制对象,阐述了倒立摆稳定控制的研究现状以及倒立摆系统的控制系统及机械结构组成。
在数学模型的基础上,重点分析基于Lagrange方程进行数学模型的方法,以及系统的能控性和能观测性。
接着进行了倒立摆系统的LQR控制方法研究。
运用最优控制理论,探讨了加权矩阵Q 和R的选取方法。
然后利用Matlab软件建立倒立摆系统模型,对二级倒立摆的LQR控制器进行了设计与仿真,利用Simulink建立了二级倒立摆的LQR控制模型,实现了二级倒立摆系统的稳定控制。
结果表明本文所给出的控制策略是有效的。
最后对倒立摆系统时滞问题进行了分析,给出了系统稳定性的判别公式。
关键词:倒立摆;Lagrange方程;数学模型;最优控制;SIMULINKDesign of Inverted Pendulum SystemABSTRACTInverted pendulum is a nonlinear,coupling,variable and natural unsteadiness system.During the controlprocess,pendulum can effectively reflect many pivotal problems such as equanimity, robust,follow-up and track.Therefore,it is a perfect model used to testing various control theories.Studying on inverted pendulum not only has a very important theory significance,but also has a realistic directory meaning in aerospace science and technology and robotics.In this paper,we establish mathematical models of double inverted pendulum system,and analyze the controllability and observability of these models.According to the theoretical analysis,this paper puts forward a solution that it is found by Linear Quadratic Optimal Control Theory.In the following,we design a double inverted pendulum’s controller based on the theory.Based on introducing the present established mathematical model,the method of the Mathematical model was done by analyzing the Lagrange equation. And the system characteristic was briefly analyzed.Next we do research on LQR control algorithm of inverted pendulum system.By using optimization control theory,the selection of matrix Q and R is dicussed.It is introduced how to realize the simulation of the inverted pendulum system by the Matlab.Double inverted pendulum LQR controller is designed and emulated.LQR control model is programmed by Simulink, control of double inverted pendulum hardware system is realized.And it indicates that the control strategy proposed in this paper is effctive.Finally,we analysis the time-delay problem of double inverted pendulum system, get the giscriminant formula of the Stability of the system.Keywords: inverted pendulum;Lagrange equation;mathematical model;optimization control theory;Simulink目录1绪论 (1)1.1倒立摆系统研究的意义和前景 (1)1.2倒立摆系统的研究现状 (1)1.3课题任务 (2)2倒立摆系统建模与性能分析 (3)2.1系统数学模型的建立 (3)2.1.1倒立摆系统的运动分析 (3)2.1.2模型建立的基本方法 (4)2.1.3模型的建立 (4)2.2倒立摆系统性能分析 (8)2.2.1系统稳定性原理 (8)2.2.2系统能控性和能观性 (9)2.2.3二级倒立摆系统性能 (9)3 倒立摆系统控制与仿真 (11)3.1 LQR理论基础 (11)3.1.1 线性二次型问题 (11)3.1.2无限时间状态调节器问题 (12)3.2矩阵黎卡提方程的求解 (12)3.3 Simulink概述 (12)3.4二级倒立摆最优控制器的设计 (13)3.4.1最优控制器的设计 (13)3.4.2二级倒立摆系统仿真 (14)4倒立摆系统的实时控制 (17)4. 1硬件在回路仿真技术 (17)4.2系统实现方案介绍 (17)4.3系统实时性分析 (18)4.4系统实现方案确定 (20)4.5本章小结 (20)5摆系统时滞问题 (21)5.1 系统的稳定性 (21)5.2小结 (23)6 结论 (24)谢辞 (25)参考文献 (26)附录A (27)附录B (34)1 绪论1.1倒立摆系统研究的意义和前景倒立摆系统是一个非线性程度严重的高阶不稳定系统,也是一个典型的多变量系统。
模糊控制技术发展现状及研究热点摘要:综合介绍丁模糊控制技术的基本原理和发展状况,重点总结丁近年来该研究领域的热点问题,并对今后的发展前景进行了展望。
关键词:模糊控制结构分析稳定性白适应控制1模糊控制的热点问题模糊控制技术是一项正在发展的技术,虽然近年来得到了蓬勃发展,但它也存在一些问题,主要有以下几个方面:(1)还投有形成完挫的理论体系,没有完善的稳定性和鲁棒性分析,系统的设计方法(包括规则的获取和优化、隶属函数的选取等);(2)控制系统的性能小太高(稳态精度牧低,存在抖动及积分饱和等问题):(3)自适应能力有限。
目前,国内外众多专家学者围绕着这些问题展开了广泛的研究,取得了一些阶段性成果,下面介绍一下近期的主要研究热点。
2模糊控制系统的稳定性分析任何一个自动控制系统要正常工作,首先必须是稳定的。
由于模糊系统本质上的非线性和缺乏统一的系统描述,使得人们难以利用现有的控制理论和分析方法对模糊控制系统进行分析和设计。
因此,模糊控制理论的稳定性分析一直是一个难点课题,未形成较为完善的理论体系。
正因为如此,关于模糊系统的稳定性分析近年来成为众人关注的热点,发表的论文较多,提出了各种思想和分析方法。
目前模糊控制系统稳定性分析方法主要有以下几种:(1)李亚普诺夫方法(2)基于滑模变结构系统的稳定性分析方法(3)描述函数方法(4)圆稳定性判据方法模糊控制系统的稳定性分析还有相平面法、关系矩阵分析法、超稳定理论、Popov判据、模糊穴——穴映像、数值稳定性分析方法以及最近出现的鲁棒控制理论分析方法和LMI(矩阵不等式)凸优化方法等。
3自适应模糊控制器的研究为了提高模糊控制系统的自适应能力,许多学者对自适应模糊控制器进行了研究,研究方向主要集中在以下方面。
(1)自校正模糊控制器自校正模糊控制器是在常规模糊控制的基础上,采用加权推理决策,并引入协调因子,根据系统偏差e和偏差变化ec的大小,预测控制系统中的不确定量并选择一个最佳的控制参数或控制规则集,在线自动调整保守和大胆控制的混合程度,从而更全面确切地反映出入对诸因素的综合决策思想,提高系统的控制精度和鲁捧性能。
西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表西安理工大学自动化与信息工程学院 2004 届学生毕业设计(论文)保存情况一览表。

模糊控制――文献综述摘要模糊控制理论是以模糊数学为基础,用语言规则表示方法和先进的计算机技术,由模糊推理进行决策的一种高级控制策。
模糊控制作为以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它已成为目前实现智能控制的一种重要而又有效的形式尤其是模糊控制和神经网络、遗传算法及混沌理论等新学科的融合,正在显示出其巨大的应用潜力。
实质上模糊控制是一种非线性控制,从属于智能控制的范畴.模糊控制的一大特点是既具有系统化的理论,又有着大量实际应用背景。
本文简单介绍了模糊控制的概念,模糊控制系统的组成,模糊控制的算法,其中包含模糊控制系统的原理、模糊控制器的分类及其设计元素。
最后以模糊PID复合控制在锅炉汽包水位控制中的应用说明模糊控制系统的整体设计过程,通过仿真证明了模糊控制显示出的优势。
1. 模糊控制的基本思想模糊控制是模糊集合理论中的一个重要方面,是以模糊集合化、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制,从线性控制到非线性控制的角度分类,模糊控制是一种非线性控制;从控制器的智能性看,模糊控制属于智能控制的范畴[1][2]。
模糊控制是建立在人类思维模糊性基础上的一种控制方式,模糊逻辑控制技术模仿人的思考方式接受不精确不完全信息来进行逻辑推理,用直觉经验和启发式思维进行工作,是能涵盖基于模型系统的技术。
它不需用精确的公式来表示传递函数或状态方程,而是利用具有模糊性的语言控制规则来描述控制过程。
控制规则通常是根据专家的经验得出的,所以模糊控制的基本思想就是利用计算机实现人的控制经验[3].2. 模糊控制系统的组成及结构分析摸糊控制系统是采用计算机控制技术构成的一种具有反馈通道的闭环结构的数字模糊控制系统。
智能性的模糊控制器是模糊控制系统的核心,一个模糊控制系统性能的优劣,主要取决于模糊控制器的结构,所采用的模糊控制规则、合成推理算法以及模糊决策的方法等因素[6] [7]。
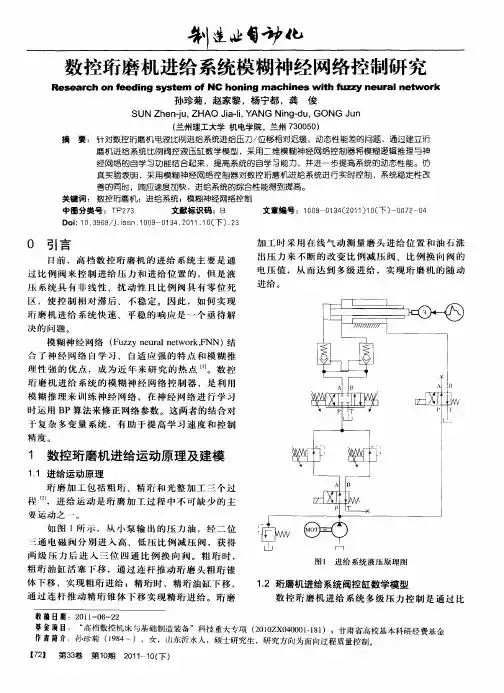
模糊控制系统组成原理如图1所示。
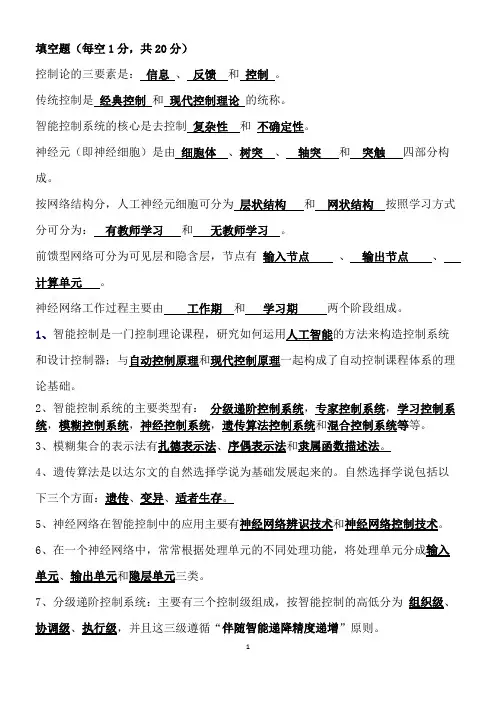
填空题(每空1分,共20分)控制论的三要素是:信息、反馈和控制。
传统控制是经典控制和现代控制理论的统称。
智能控制系统的核心是去控制复杂性和不确定性。
神经元(即神经细胞)是由细胞体、树突、轴突和突触四部分构成。
按网络结构分,人工神经元细胞可分为层状结构和网状结构按照学习方式分可分为:有教师学习和无教师学习。
前馈型网络可分为可见层和隐含层,节点有输入节点、输出节点、计算单元。
神经网络工作过程主要由工作期和学习期两个阶段组成。
1、智能控制是一门控制理论课程,研究如何运用人工智能的方法来构造控制系统和设计控制器;与自动控制原理和现代控制原理一起构成了自动控制课程体系的理论基础。
2、智能控制系统的主要类型有:分级递阶控制系统,专家控制系统,学习控制系统,模糊控制系统,神经控制系统,遗传算法控制系统和混合控制系统等等。
3、模糊集合的表示法有扎德表示法、序偶表示法和隶属函数描述法。
4、遗传算法是以达尔文的自然选择学说为基础发展起来的。
自然选择学说包括以下三个方面:遗传、变异、适者生存。
5、神经网络在智能控制中的应用主要有神经网络辨识技术和神经网络控制技术。
6、在一个神经网络中,常常根据处理单元的不同处理功能,将处理单元分成输入单元、输出单元和隐层单元三类。
7、分级递阶控制系统:主要有三个控制级组成,按智能控制的高低分为组织级、协调级、执行级,并且这三级遵循“伴随智能递降精度递增”原则。
传统控制方法包括经典控制和现代控制,是基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,适于解决线性、时不变性等相对简单的控制。
智能控制的研究对象具备以下的一些特点:不确定性的模型、高度的非线性、复杂的任务要求。
IC(智能控制)=AC(自动控制)∩AI(人工智能) ∩OR(运筹学)AC:描述系统的动力学特征,是一种动态反馈。
AI :是一个用来模拟人思维的知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。
OR:是一种定量优化方法,如线性规划、网络规划、调度、管理、优化决策和多目标优化方法等。
现代主要控制方法的研究现状及展望现代主要控制方法的研究现状及展望1. 引言控制技术一直是工程领域的重要研究方向,随着科技的不断发展,现代主要控制方法成为了当前的研究热点。
控制方法的研究旨在实现对系统状态或输出的精确控制,从而达到预期的性能指标。
本文将就现代主要控制方法的研究现状及展望展开讨论。
2. 现代控制方法的分类现代控制方法主要包括PID控制、自适应控制、模糊控制、神经网络控制和模型预测控制等。
这些方法在不同的应用领域中发挥着重要作用,但也存在着不同程度的局限性。
在研究现状方面,各种控制方法都在不断地进行改进和发展,以满足对控制精度和鲁棒性的要求。
3. PID控制方法的研究现状PID控制作为一种经典的控制方法,其研究侧重于提高控制系统的稳定性和鲁棒性。
近年来,研究者们通过引入自适应算法和模糊逻辑等方法,对PID控制进行了改进,使其在复杂系统中也能够取得较好的控制效果。
然而,PID控制仍然存在参数调节繁琐、鲁棒性差等问题,未来的研究重点将集中在自适应PID控制和非线性PID控制等方向。
4. 自适应控制方法的研究现状自适应控制旨在实现对系统参数变化的自动调节,以保持系统的性能。
近年来,基于模型参考自适应控制和自适应滑模控制等方法得到了广泛研究和应用。
这些方法通过建立系统模型并引入自适应机制,实现了对系统参数变化的实时跟踪和调节。
未来的研究方向将聚焦于复杂系统的自适应控制和混沌系统的自适应控制等。
5. 模糊控制方法的研究现状模糊控制方法利用模糊逻辑对系统进行建模和控制,能够很好地处理系统的非线性和模糊性。
近年来,研究者们通过改进模糊推理算法和优化控制规则,提高了模糊控制方法的控制精度和鲁棒性。
未来,模糊控制方法有望在智能控制、模糊神经网络和模糊PID控制等方面得到进一步拓展和应用。
6. 神经网络控制方法的研究现状神经网络控制方法利用神经网络对系统进行建模和控制,能够很好地处理非线性和时变系统。
目前,基于深度学习和强化学习等方法的神经网络控制正在得到广泛关注和研究。
模糊控制器的设计步骤模糊控制器是一种针对非线性、模糊、不确定性系统的控制方法,在控制领域有着广泛的应用。
设计一个模糊控制器需要遵循以下步骤:1. 确定控制系统的输入和输出在设计模糊控制器之前,首先需要明确控制系统的输入和输出是什么。
输入可以是系统的状态或者外部的信号,输出可以是系统的输出或者控制器的输出。
2. 确定输入和输出的量化范围输入和输出的范围需要进行量化,以便在模糊控制器中进行处理。
量化范围通常是以数字的形式表示,例如温度范围从0到100度。
3. 确定模糊变量模糊变量是指控制系统中模糊化的变量,例如温度可以被表示为模糊变量“冷”、“温暖”和“热”。
模糊变量的数量和它们之间的关系需要根据实际情况进行确定。
4. 确定模糊规则模糊规则是指模糊变量之间的关系,例如如果温度为“冷”则需要增加加热器的功率。
模糊规则可以通过专家系统或者试验数据来确定。
5. 设计模糊推理机制模糊推理机制是指根据模糊规则,将输入模糊变量转化为输出模糊变量的过程。
模糊推理机制可以是模糊关系、模糊逻辑或者模糊神经网络等。
6. 设计输出反模糊化输出反模糊化是指将模糊变量转化为具体的控制信号的过程,例如将“冷”、“温暖”和“热”转化为具体的温度控制信号。
输出反模糊化可以使用加权平均法、最大值法或者中心平均法等。
7. 设计模糊控制器模糊控制器是指将模糊规则、模糊推理机制和输出反模糊化组合在一起的系统。
模糊控制器可以使用模糊PID控制器、模糊自适应控制器或者模糊神经网络控制器等。
8. 仿真和调试在实际运用中,需要对模糊控制器进行仿真和调试,以验证控制效果和精度。
可以使用MATLAB等软件进行模拟和调试,优化控制器的各个参数和规则。
设计一个模糊控制器需要经过多个步骤,从控制系统的输入和输出、模糊变量、模糊规则、模糊推理机制、输出反模糊化到最终的控制器设计和仿真调试,需要综合考虑多个因素和参数,才能得到最优的控制效果。
非线性系统智能控制算法的研究与应用随着科技的快速发展,非线性系统在现代工程技术中的应用越来越广泛。
非线性系统问题的解决需要相对复杂的数学和物理模型,加上非线性系统难以发现特征值,对传统控制方法的稳定性等方面的要求也更高。
智能控制算法的出现给非线性系统的问题提供了有效的解决方案,大大提高了非线性系统控制的精度和效率。
非线性系统智能控制算法主要包括模糊控制、神经网络控制、遗传算法控制等,这些算法的出现一定程度上弥补了传统线性控制系统在非线性控制领域的不足,也取得了很高的应用价值。
一、模糊控制模糊控制是通过提供符合人类的思维模式来实现自适应控制的一种方法,它可以在非线性系统控制中应用。
该控制方法的优势在于对于复杂问题建模能力强,适合应用于非线性的控制问题中。
在智能控制中,模糊控制器主要由何种控制规则构成,以及如何对它们进行分析来确定输出控制的变量值。
模糊控制器通常将小数、整数和语言描述转化为逻辑形式,这种方法可以避免特定条件的误导性对大多数系统的控制造成的影响,提高了非线性系统控制精度和效率。
二、神经网络控制神经网络控制是一种由多个神经元组成的复杂系统,结构类似于人类大脑的神经网络。
神经网络控制器可以对系统的非线性动态行为进行预测,通过学习和训练使控制策略不断优化,从而提高控制精度和效率。
与模糊控制相比,神经网络控制在设计时不需要任何的数学模型,更加适合复杂系统和噪声较大情况下的控制。
三、遗传算法控制遗传算法控制是一种基于遗传学原理的智能控制方法,该算法通过将控制参数进行编码,利用自然选择和遗传变异的机制进行控制策略的优化,达到提高非线性系统控制效率的目的。
对于非线性系统,遗传算法控制可以通过一定的迭代计算使得得到的控制策略得到优化,达到自适应控制达到优化效果。
综上所述,智能控制在非线性系统控制中发挥着重要作用。
模糊控制、神经网络控制和遗传算法控制在非线性系统控制应用中起着重要的促进作用,进一步推动了非线性系统控制技术的发展。
控制系统设计与优化中的多变量控制技术研究随着现代工业过程的复杂性和自动化水平的提高,控制系统在工程实践中的应用越来越广泛。
多变量控制技术作为控制系统设计与优化的重要组成部分,被广泛研究和应用。
本文将探讨多变量控制技术在控制系统设计与优化中的基本概念、方法和应用。
一、多变量控制技术概述多变量控制技术是指在一个系统中同时控制多个输入和输出变量的控制技术。
相比于单变量控制技术,多变量控制技术能够更全面地考虑系统的动态特性和耦合效应,进一步提高系统的控制精度和稳定性。
例如,在化工过程中,同时控制多个温度、压力和流量等变量,能够确保生产过程的安全稳定和效率优化。
二、多变量控制技术的基本方法1. 线性多变量控制方法线性多变量控制方法是最常用和成熟的多变量控制技术之一。
其中,传统的PID控制器是最简单的线性多变量控制方法之一。
在PID控制器中,根据系统的输入和输出变量之间的关系,进行参数调整和系统建模,从而实现对多个变量的同时控制。
此外,基于线性代数和系统理论的LQ控制、LQR控制和H∞控制等方法也被广泛应用于多变量控制领域。
2. 非线性多变量控制方法非线性多变量控制方法考虑了系统非线性特性的影响,适用于非线性和强耦合的系统。
其中,模型预测控制(MPC)是一种常用的非线性多变量控制方法。
MPC将系统建模和优化算法相结合,通过预测和优化系统的未来行为,确定最优控制策略,并在实时调整中对控制器参数进行更新。
此外,基于模糊理论和人工神经网络的非线性多变量控制方法也具有一定的应用潜力和研究价值。
三、多变量控制技术的应用研究多变量控制技术在各个领域的应用研究中取得了显著成果。
以下列举几个典型的应用示例:1. 化工过程控制在化工过程中,同时控制多个变量是确保产品质量和生产效率的关键。
利用多变量控制技术,可以准确地控制和优化温度、压力、流量等多个变量,提高产品质量、降低生产成本和能源消耗。
2. 机械系统控制在机械系统中,多个变量之间的相互作用往往非常复杂。