天行机械手操作手册
- 格式:ppt
- 大小:11.36 MB
- 文档页数:70
天行机械手说明书汇总天行机械手基本使用手册合集在操作项机器或应用时,一开始我们都需要借助说明书的辅助,这样可以让我们更好地将工具利用起来。
关于“天行机械手说明书汇总和天行机械手基本使用手册合集”内容都整理在下方,有需要的朋友可以来看看。
机械手清零便是回归原点。
一般机械手归原点的方法有很多种,我们可以根据机械手的故障情况来进行选择,归原点的方法一般有机械手电机找原点法,z轴信号法,电机、z轴信号相结合法。
一、机械手电机寻找原点时,当碰到原点开关时,马上减速停止,以此点为原点。
这种回原点方法的精度不高。
二、z轴信号法直接寻找编码器的z轴信号法,当有z轴信号法时,马上减速停止。
这种回原方法一般只应用在旋转轴,且回原速度不高,精度也不高。
三、电机、z轴信号相结合法此种回原方法是最精准的。
文章来自园大第一段高速去找原点开关,有原点开关信号时,电机马上以第二段速度寻找电机的Z相信号,第一个z轴信号一定是在原点档块上。
找到第一个z轴信号后,此时有两种方试,一种是档块前回原点,一种是档块后回原点(档块前回原点较安全,欧系多用,档块后回原点工作行程会较长,日系多用)。
以档块后回原为例,找到档块上第一个z轴信号后,机械手电机会继续往同一方向转动寻找脱离档块后的第一个z轴信号。
此种回原方法是最精准的,且重复回原精度高。
操作说明2.1开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按 Home 键,系统开始归原点; 9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。

机械手操作指导机械手在安装后,AAC已经对内部参数进行了必要的设定,在以后的使用中,只需要更改程序的位置和I/O,就可以适应不同的模具进行生产。
新装的机械手中使用:1.开机打开机械手的电源开关(主电源开关行程为90度),机械手会自动启动,进入机械手控制程序,这时可以在手动页面或选项页面打开机械手的伺服电源2.校零机械手在启动后,需要确认各个轴的零点位置。
当机械手的伺服电源打开后,在手动页面或选项页面按下校零按钮,机械手自动执行校零程序,当校零完成时,机械手会发出警报提示操作者机械手已经完成校零。
3.编程机械手在重新开电校零后,无论是使用以前的程序还是要编新的程序,操作者都要重新确认每一步的位置。
操作者根据生产的需求,在编程前先构思程序的整个流程(六个工序的具体位置,I/O的控制),然后在设置菜单中添加或删除图标。
在程序编完后,重新检查程序的每一步的位置和I/O以防止因粗心而造成的失误。
机械手的程序主要分为六步工序,分别是:准备工序(Prestage)、取出工序(Tackout)、卸货工序(Unload)、丢弃工序(Reject)、复位工序(Home1,Home2)准备工序:机械手做一些注塑前的准备工作,如从工作台拾取Label,拾取螺钉,以便于在取出工序中将其放入模内注塑.取出工序:将产品和水口从模具内取出,有时也会放一些Insert在模内.卸货工序:将产品放到传送带或采用托盘程序将产品直接装箱.丢弃工序:机械手可以根据SPI信号和本机的设定来执行丢弃工序,将不合格的产品放到废品箱,以便于同良品分开.复位工序:复位工序包括模内复位工序(Home1)、模外复位工序(home2).在按下READY 按钮后,机械手会根据设定的Tie bar值来判断机械手是执行模内复位工序还是模外复位工序.这两个工序确保机械手无论处于何地,都能安全的回到准备位置,开始下一轮全自动生产.4.生产确保机械手同注塑机联机,在编程完成后,就可以进入自动菜单运行全自动生产。
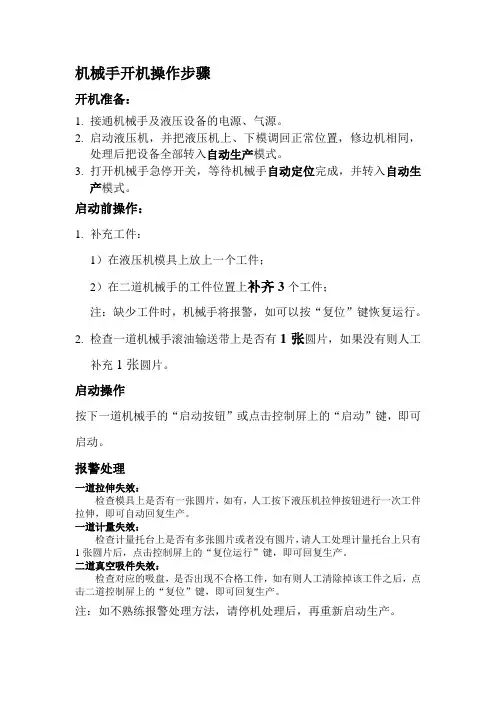
机械手开机操作步骤
开机准备:
1.接通机械手及液压设备的电源、气源。
2.启动液压机,并把液压机上、下模调回正常位置,修边机相同,
处理后把设备全部转入自动生产模式。
3.打开机械手急停开关,等待机械手自动定位完成,并转入自动生
产模式。
启动前操作:
1.补充工件:
1)在液压机模具上放上一个工件;
2)在二道机械手的工件位置上补齐3个工件;
注:缺少工件时,机械手将报警,如可以按“复位”键恢复运行。
2.检查一道机械手滚油输送带上是否有1张圆片,如果没有则人工
补充1张圆片。
启动操作
按下一道机械手的“启动按钮”或点击控制屏上的“启动”键,即可启动。
报警处理
一道拉伸失效:
检查模具上是否有一张圆片,如有,人工按下液压机拉伸按钮进行一次工件拉伸,即可自动回复生产。
一道计量失效:
检查计量托台上是否有多张圆片或者没有圆片,请人工处理计量托台上只有1张圆片后,点击控制屏上的“复位运行”键,即可回复生产。
二道真空吸件失效:
检查对应的吸盘,是否出现不合格工件,如有则人工清除掉该工件之后,点击二道控制屏上的“复位”键,即可回复生产。
注:如不熟练报警处理方法,请停机处理后,再重新启动生产。
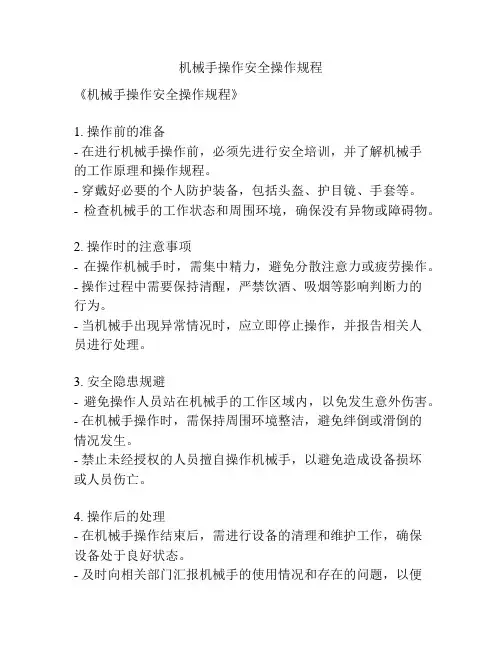
机械手操作安全操作规程
《机械手操作安全操作规程》
1. 操作前的准备
- 在进行机械手操作前,必须先进行安全培训,并了解机械手
的工作原理和操作规程。
- 穿戴好必要的个人防护装备,包括头盔、护目镜、手套等。
- 检查机械手的工作状态和周围环境,确保没有异物或障碍物。
2. 操作时的注意事项
- 在操作机械手时,需集中精力,避免分散注意力或疲劳操作。
- 操作过程中需要保持清醒,严禁饮酒、吸烟等影响判断力的
行为。
- 当机械手出现异常情况时,应立即停止操作,并报告相关人
员进行处理。
3. 安全隐患规避
- 避免操作人员站在机械手的工作区域内,以免发生意外伤害。
- 在机械手操作时,需保持周围环境整洁,避免绊倒或滑倒的
情况发生。
- 禁止未经授权的人员擅自操作机械手,以避免造成设备损坏
或人员伤亡。
4. 操作后的处理
- 在机械手操作结束后,需进行设备的清理和维护工作,确保
设备处于良好状态。
- 及时向相关部门汇报机械手的使用情况和存在的问题,以便
进行及时的维修和改进。
遵守《机械手操作安全操作规程》,可以有效保障操作人员的安全,减少因机械手操作而导致的意外事件发生,提高工作效率和质量。
因此,在使用机械手进行操作时,务必严格遵守相关规程,切实做好安全防护工作。

机械手操作规程1. 前言机械手是一种自动化装置,广泛应用于工业生产线上的材料处理和产品装配等工序。
为了确保机械手的安全操作和顺利运行,制定一套机械手操作规程是至关重要的。
本文将详细介绍机械手的操作规程,包括机械手的启动与停止、操作人员的安全要求、紧急情况处理、机械手维护等内容。
2. 机械手启动与停止2.1 机械手的启动必须由经过培训并持有相关证书的操作人员操作,并按照以下步骤进行:a) 确保操作区域没有人员障碍,相关机械设备处于正常工作状态。
b) 按下机械手启动开关,确认所有安全保护装置和传感器正常工作。
c) 使用机械手的操纵面板或控制系统设定相关参数和指令。
d) 验证机械手的动作是否与预期一致。
2.2 机械手的停止可以通过以下方式实现:a) 手动关闭机械手的启动开关。
b) 控制系统发出停止指令。
3. 操作人员的安全要求3.1 在进行机械手操作前,操作人员必须穿戴个人防护装备,包括头盔、护目镜、耳塞、防护服等。
3.2 禁止戴手套操作机械手,以免手套被夹住或纠缠在机械手部件上。
3.3 操作人员应确保双手干燥,以防止滑动或失去操作控制。
3.4 操作过程中,应严禁随意触摸机械手上的运动部件以及故障诊断区域。
4. 紧急情况处理4.1 在机械手操作中,如遇紧急情况或人身安全受到威胁,操作人员应立即采取以下措施:a) 紧急停止机械手运行,关闭启动开关。
b) 向附近的工作人员发出求助信号。
c) 配合现场救援人员进行安全疏散。
4.2 针对机械手发生故障或意外事故的紧急情况,操作人员应知悉机械手的紧急停止装置的位置和使用方法,并随时保持冷静和集中注意力。
5. 机械手维护5.1 定期检查机械手的机械部件和电气部件,确保其正常工作。
5.2 根据机械手制造商的指导和要求,定期更换润滑油和其他易损件。
5.3 机械手的维护工作应由经过培训的维护人员进行,确保维修操作的安全性和有效性。
5.4 在机械手维护期间,应采取必要的安全措施,例如切断电源、锁定开关和传动装置,以防止意外启动或运动。
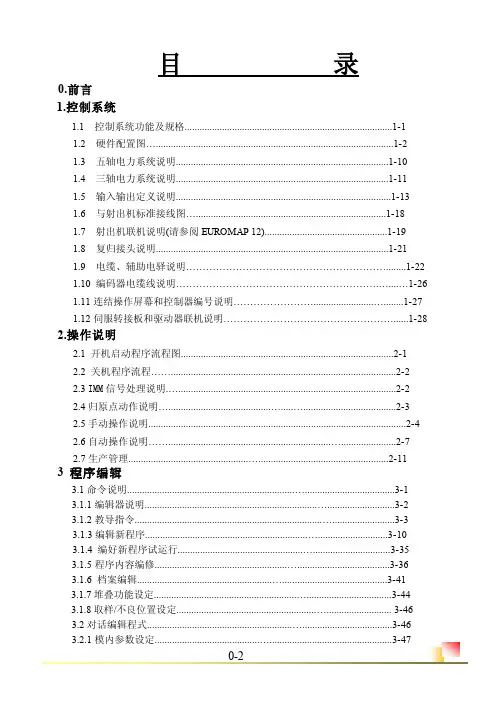
目录0.前言1.控制系统1.1 控制系统功能及规格...................................................................................1-11.2 硬件配置图…...............................................................................................1-21.3 五轴电力系统说明.....................................................................................1-101.4 三轴电力系统说明.....................................................................................1-111.5 输入输出定义说明......................................................................................1-131.6 与射出机标准接线图…............................................................................1-181.7 射出机联机说明(请参阅EUROMAP 12).................................................1-191.8 复归接头说明.............................................................................................1-211.9 电缆、辅助电驿说明……………………………………………………........1-221.10 编码器电缆线说明…………………………………………………….…....…1-261.11连结操作屏幕和控制器编号说明……………………........................…........1-271.12伺服转接板和驱动器联机说明……………………………………………......1-282.操作说明2.1 开机启动程序流程图.....................................................................................2-12.2 关机程序流程……..........................................................................................2-22.3 IMM信号处理说明.….......................................................................................2-22.4归原点动作说明….........................................….....….....................................2-32.5手动操作说明.......................................................................................................2-42.6自动操作说明…….................................................................…......................2-72.7生产管理................................................…....................................................2-113 程序编辑3.1命令说明...................................................................…....................................3-13.1.1编辑器说明.....................................................................…...........................3-23.1.2教导指令...........................................................................….........................3-33.1.3编辑新程序.................................................................…............................3-103.1.4 编好新程序试运行..................................................…...............................3-353.1.5程序内容编修.....................................................….....................................3-363.1.6 档案编辑......................................................…..........................................3-413.1.7堆叠功能设定.........................................................…..................................3-443.1.8取样/不良位置设定........................................................….......................... 3-463.2对话编辑程式..........................................................…....................................3-463.2.1模内参数设定..........................................….................................................3-473.2.2中途参数设定...............................................................................................3-503.2.3终点功能设定...............................................................................................3-513.2.4公共参数设定...............................................................................................3-523.2.5资料存储......................................................................................................3-53 4维护篇4.1系统相关参数设定............................................................................................4-14.1.1操作设定........................................................................................................4-14.1.2禁区设定........................................................................................................4-24.1.3极限设定........................................................................................................4-34.1.4出厂设定........................................................................................................4-34.1.5语言切换........................................................................................................4-44.1.6系统参数备份.................................................................................................4-44.1.7系统升级........................................................................................................4-54.2系统维护...........................................................................................................4-64.3教好程序备份..................................................................................................4-104.4操作错误说明..................................................................................................4-11 5高级应用及编程5.1系统设定...........................................................................................................5-15.2指令说明..........................................................................................................5-65.2.1逻辑运算指令................................................................................................5-75.2.2数值设定类....................................................................................................5-85.2.4 系统数据备份和还原...................................................................................5-10。
机械手安全操作规程
1. 使用前的准备
在开始操作机械手之前,操作人员需要进行以下准备工作:
- 确保机械手处于正常工作状态,无故障或损坏。
- 确认操作人员已经接受过相关的操作培训,并具备相应的资质。
- 检查操作区域是否清洁整齐,没有杂物或其他障碍物。
2. 操作流程
按照以下步骤进行机械手的安全操作:
1. 打开机械手的电源,确保连接正常。
2. 系好安全带,戴好手套和护目镜。
3. 调整机械手的姿态和位置,确保能够有效完成操作任务。
4. 使用控制器对机械手进行指令操作,注意保持指令的准确性和精确度。
5. 在操作过程中,密切观察机械手的动态,确保其运行正常,
没有异常情况。
6. 在机械手完成操作任务后,及时关闭电源,并进行必要的关
机操作。
3. 安全注意事项
在操作机械手时,需要特别注意以下安全事项:
- 避免将手或其他身体部位靠近机械手的工作区域,以防止可
能的伤害。
- 确保操作过程中没有人员或其他物体处于机械手的运动范围内。
- 使用机械手过程中,严禁擅自更改或调整机械手的程序设置。
- 在操作完成后,清理操作区域,将机械手和相关设备存放在
指定位置。
4. 突发情况处理
在遇到机械手突发情况时,需要立即停止操作,并按照以下步骤进行处理:
1. 关闭机械手的电源,防止进一步的意外发生。
2. 立即向上级主管或相关技术人员报告,通知他们当前情况。
3. 尽量保持现场的现状,不要擅自动手修复或处理问题。
以上就是机械手的安全操作规程,请严格按照规程进行操作,确保工作安全和效率。
机械手操作规程机械手是一种常见的工业自动化设备,在生产制造过程中起到至关重要的作用。
为了确保机械手具有高效的工作性能并保证生产安全,必须遵循严格的操作规程。
下面是一份机械手操作规程的文档,详细介绍了机械手操作的注意事项和安全措施。
一、前言机械手是一种高度智能化的设备,能够实现精准操作和灵活调整。
在使用机械手时,必须严格遵守安全操作规程,以免发生意外事故。
本文档旨在阐述机械手的操作规程,以提示工作人员在使用机械手时的注意事项。
二、机械手的基本组成机械手是由机械臂、控制器、工具端等多个组成部分组成的。
机械手通常由以下组成部分构成:1. 机械臂:机械臂是机械手的核心部分,通常具有多个运动关节,可以调整臂长、角度和位置。
在进行机械手操作时,机械臂是最关键的部分。
2. 控制器:控制器用于控制机械臂的运动。
通常包括程序控制器、运动控制器和信号处理器等。
在使用机械手时,操作人员必须能够熟练掌握控制器的各项操作,同时需注意控制器的安全使用。
3. 工具端:工具端是机械手的作业工具,通常根据不同的作业需要进行选择。
在进行机械手操作时,需要根据实际情况选择适合的工具端,以确保操作的高效性和安全性。
三、操作规程1. 预备工作在进行机械手操作之前,需要做好以下几个预备工作:(1) 检查控制器和机械臂是否正常运转,确保所有零部件处于正常工作状态。
(2) 检查工具端是否与机械臂连接牢固,确保不会出现掉落和意外伤害。
(3) 对需要处理的物品进行认真检查,确保其符合操作要求。
2. 操作步骤(1) 开始操作前,必须确认工作区域内没有人员和障碍物,以免影响机械手的正常运转。
(2) 将物品放置在工作区域内,确保物品与机械手的工作范围相符,并根据需要选择合适的工具端进行操作。
(3) 打开机器人控制器电源,按照程序运行机械手,让机械手各部分运转到位,达到最佳工作状态。
(4) 操作人员应站在安全区域,观察机械手的工作状态和动作,确保机械手可以准确地执行任务。
机械手作业指导书一、介绍机械手是一种自动化设备,用于完成各种物体的搬运、装配、焊接等作业。
为了确保机械手的正常运行和作业效率,本指导书将详细介绍机械手的操作步骤、安全注意事项以及常见故障排除方法。
二、操作步骤1. 准备工作:a. 确保机械手的电源已连接并正常工作。
b. 检查机械手的机械臂、夹爪等部件是否处于良好状态。
c. 确保作业区域的环境整洁,没有障碍物。
2. 启动机械手:a. 打开机械手的电源开关。
b. 按照机械手的启动程序进行操作,确保机械手进入正常工作状态。
3. 设置作业参数:a. 根据作业需求,设置机械手的运动速度、力度等参数。
b. 确保机械手的运动范围符合作业要求。
4. 进行作业:a. 将待处理的物体放置在机械手的工作区域内。
b. 根据作业要求,调整机械手的姿态和位置,确保夹爪能够准确抓取物体。
c. 启动机械手的抓取功能,将物体抓取起来并移动到目标位置。
d. 根据作业流程的要求,进行必要的装配、焊接等操作。
e. 完成作业后,将物体放置到指定位置。
5. 关闭机械手:a. 在作业完成后,关闭机械手的电源开关。
b. 清理机械手的工作区域,确保无残留物。
三、安全注意事项1. 在操作机械手之前,必须熟悉机械手的操作手册,并接受相关培训。
2. 在操作过程中,应佩戴适当的个人防护装备,如手套、护目镜等。
3. 严禁将手或其他身体部位靠近机械手的运动部件,以免发生意外伤害。
4. 在进行维护、保养或故障排除时,必须先关闭机械手的电源,并确保机械手处于停止状态。
5. 定期检查机械手的各个部件,如机械臂、夹爪等,确保其正常工作。
6. 在作业过程中,严禁将机械手用于超出其额定负荷的作业。
四、常见故障排除方法1. 机械手无法启动:a. 检查机械手的电源连接是否正常。
b. 检查电源开关是否打开。
c. 检查机械手的控制系统是否正常。
2. 机械手运动异常:a. 检查机械手的运动部件是否受损或卡住。
b. 检查机械手的传感器是否正常工作。
修订记录目的为了让技术人员了解机器,正确的操作,确保操作安全和产品的品质范围适用本部门技术员责任人技术员一、机械手的操作1 先接好气管,让机械手气压表的气压在4kg-8kg之间。
2 打开机械手电源开关,并在注塑机控制板上打开机械手功能键。
3 注塑机开模完成后,先手动放下机械手臂,并调节好手臂下降的位置。
在调试机械手的各行程位置时,首先模开到足够宽的位置,再把机械手气缸里的气放掉,用手慢慢地托下主臂,再逐一进行调试,以免机械手下降时损坏模具及治具4 按“手动”键,即可进入手动操作画面,依所须动作,先按“选择”键,再按“动作”键,依次调节好各动作的延时时间,检查安全报警装置,机械手取出异常时能否发生报警,开机之前必须调好检测,以免压模。
5 按产品的要求设定或选择所需要的程式合理进行取物,然后在注塑机自动状态下,按“全自动”键即可进入自动生产。
6 如要修改动作程式:按“停止”键和“修改”键,进入程式修改画面。
7 技术人员可依据不同的模具,输入动作程式“0-99”,确定后按“输入”键确认,再按“停止”键,然后按“全自动”键进入自动生产。
8 其它设定参照设备使用说明书。
二、安全注意事项1气压表的气压一定要在4kg-8kg之间。
2机械手臂下降后,不能作回旋动作。
使取出臂下降到模具内进行手动运转时,要充分注意不要使取出臂接触到模具,而且,取出臂的操作要在安全范围以外的地方操作.3 注塑机开模未完成,机械手臂不能作下降动作。
4 可打开注塑机安全门关警报,处理完警报,关上安全门即可自动生产。
5.在不使用机械手时,必须把机械手臂置于安全位置,以防机器震动时手臂落下而损坏..6. 机械手运转中,人不可站在机械手落下或作动的范围内,也不可把手或其它的物体伸入机械手作动的安全范围内.。
引言概述:机械手是一种自动化设备,广泛应用于工业领域中。
为了确保机械手的安全操作和高效运行,制定一套完善的机械手操作规程是必要的。
本文将从机械手的基本原理、操作准备、操作流程、安全注意事项和维护保养等五个大点详细阐述机械手的操作规程。
正文内容:一、机械手的基本原理1.机械手的工作原理:介绍机械手的基本结构和工作原理,包括电机、传动装置和控制系统等。
2.机械手的运动方式:详细介绍机械手的运动方式,如点动、连续运动和编程运动等。
二、机械手操作准备1.安全检查:在操作机械手之前,需要对相关设备和工作环境进行安全检查,确保机械手的正常运行和操作的安全性。
2.程序预设:根据实际需求,对机械手进行程序预设,包括位置预设、速度预设和力度预设等。
三、机械手操作流程1.机械手的启动与停止:详细描述机械手的启动和停止流程,包括控制开关的操作和相关指示灯的解读等。
2.机械手的自动运行:介绍机械手的自动运行流程,包括程序调用、动作执行和状态监测等。
3.机械手的手动操作:说明机械手的手动操作流程,包括示教操作、示教器的使用和手动调整等。
四、机械手操作安全注意事项1.个人安全防护:强调操作人员在操作机械手时必须佩戴相关个人防护装备,如手套、护目镜等。
2.设备安全措施:介绍在机械手操作过程中需要遵循的设备安全措施,如固定设备、防护罩的使用和电气安全等。
3.环境安全管理:说明在机械手操作过程中需要注意的环境安全管理,如通风、防尘等措施的落实。
4.操作风险评估:提醒操作人员在操作机械手前进行风险评估,确保操作过程的安全性。
5.事故应急预案:机械手操作过程中可能出现的事故和应急处理措施,包括故障排除、人员撤离和报警等。
五、机械手的维护保养1.日常维护:介绍机械手的日常维护工作,如清洁、润滑、紧固和检查等。
2.定期保养:详细说明机械手的定期保养工作,如零部件更换、系统校准和功能测试等。
3.保修事项:提醒操作人员在发现机械手出现故障或异常时及时联系维修部门,并记录相关信息。
动作说明
一、产品(每模产品为8件)
二、自制夹具
三、动作次序
开模完延时1s
机械臂进入模具(如图一)
夹具上行(
20mm
)
机械手整体转动10度
20mm 推动放圈手柄(图二) 松开放圈手柄夹具上行夹具退出 自制夹具顺时自制夹具逆时针旋转 机械臂回原点
取产品滑道
放圈手柄
四、动作步骤说明
第一步、机械臂从原点伸向模腔内,该动作方向与产品方向一致,目的是使产品能顺利进入产品滑道;
第二步、机械臂垂直向上移动20毫米(该动作的目的是使产品从下腔中取出产品);
第三步、机械臂整体顺时针旋转10°(该动作目的是将钢圈中心位置与下模腔中心对正,让钢圈能顺利落入模具中);
第四步、推动放圈按钮(该动作是将存放在储圈槽的钢圈放到模腔内);
第五步、退回放圈按钮(该动作是将钢圈推板回位为下次动作做准备);
第六步、机械臂从模腔中退回;
第七步、机械臂旋转约30°(该动作是将产品转到空位,好操作);
第八步、自制夹具旋转30°(该动作是将产品从滑道中脱出); 第九步、自制夹具旋转回位; 第十步、机械臂旋转回位; 第十一步、机械臂回原点。
五、上面“四”为主臂,而水口动作为标准动作。
六、附图。
天行机械手老版模式转换教程(原创实用版)目录一、引言1.介绍天行机械手2.阐述教程的目的和适用对象二、老版模式与新版模式的区别1.控制方式的不同2.功能模块的区别三、模式转换步骤1.准备工具和材料2.关闭电源并拔掉电源线3.拆卸机械手外壳4.接触并拔掉老版模式的连接线5.接入新版模式的连接线6.安装机械手外壳7.开机测试四、可能出现的问题及解决方法1.接触不良导致的故障2.配件不兼容导致的问题3.操作不当导致的损坏五、总结1.重申教程的目的和意义2.提醒注意事项和安全规范正文一、引言天行机械手是一款广泛应用于工业生产领域的自动化设备,以其高效、精确和稳定的性能受到广大用户的青睐。
随着科技的进步和用户需求的变化,天行机械手的模式也在不断地更新升级。
为了帮助用户更好地适应新版模式,我们特推出这篇老版模式转换教程,旨在帮助大家轻松完成机械手的模式转换。
本教程适用于拥有天行机械手的用户及技术人员。
二、老版模式与新版模式的区别1.控制方式的不同:老版模式的天行机械手采用有线控制,而新版模式则采用无线控制。
无线控制方式使得操作更加便捷,同时也减少了线缆的束缚,提高了机械手的移动灵活性。
2.功能模块的区别:新版模式的机械手相较于老版模式,增加了更多实用功能,例如自动避障、速度调节等。
这些功能使得机械手在复杂环境下的适应性更强,能够满足更多样化的生产需求。
三、模式转换步骤在进行模式转换之前,请确保您已经准备好以下工具和材料:新版模式的连接线、螺丝刀、一字螺丝刀、尖嘴钳等。
接下来,按照以下步骤进行模式转换:1.关闭电源并拔掉电源线:为了确保您的安全,请在进行任何操作之前,先关闭机械手的电源,并拔掉电源线。
2.拆卸机械手外壳:使用螺丝刀和尖嘴钳,将机械手的外壳拆卸下来,暴露出内部的连接线和控制模块。
3.接触并拔掉老版模式的连接线:在拆卸外壳后,您可以看到老版模式的连接线。
使用尖嘴钳夹住连接线,轻轻地将其拔掉。
4.接入新版模式的连接线:将新版模式的连接线一端插入控制模块的相应接口,另一端接入机械手的外壳。