理论力学第10章的课后习题答案
- 格式:ppt
- 大小:376.00 KB
- 文档页数:9
第一章静力学公理与受力分析(1)一.是非题1、加减平衡力系公理不但适用于刚体.还适用于变形体。
()2、作用于刚体上三个力的作用线汇交于一点.该刚体必处于平衡状态。
()3、刚体是真实物体的一种抽象化的力学模型.在自然界中并不存在。
()4、凡是受两个力作用的刚体都是二力构件。
()5、力是滑移矢量.力沿其作用线滑移不会改变对物体的作用效果。
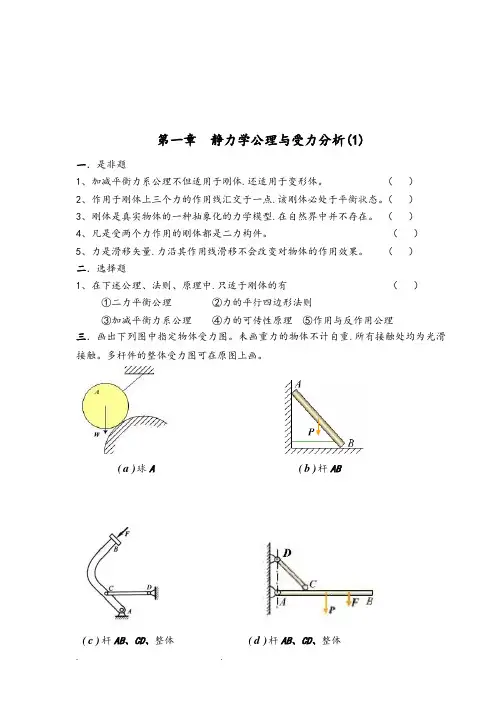
()二.选择题1、在下述公理、法则、原理中.只适于刚体的有()①二力平衡公理②力的平行四边形法则③加减平衡力系公理④力的可传性原理⑤作用与反作用公理三.画出下列图中指定物体受力图。
未画重力的物体不计自重.所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
b(杆ABa(球A ))d(杆AB、CD、整体)c(杆AB、CD、整体))e(杆AC、CB、整体)f(杆AC、CD、整体四.画出下列图中指定物体受力图。
未画重力的物体不计自重.所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
)a(球A、球B、整体)b(杆BC、杆AC、整体第一章 静力学公理与受力分析(2)一.画出下列图中指定物体受力图。
未画重力的物体不计自重.所有接触处均为光滑接触。
多杆件的整体受力图可在原图上画。
WADB CE Original FigureAD B CEWWFAxF AyF BFBD of the entire frame)a (杆AB 、BC 、整体)b (杆AB 、BC 、轮E 、整体)c (杆AB 、CD 、整体 )d (杆BC 带铰、杆AC 、整体)e(杆CE、AH、整体)f(杆AD、杆DB、整体)g(杆AB带轮及较A、整体)h(杆AB、AC、AD、整体第二章平面汇交和力偶系一.是非题1、因为构成力偶的两个力满足F= - F’.所以力偶的合力等于零。
()2、用解析法求平面汇交力系的合力时.若选用不同的直角坐标系.则所求得的合力不同。
()3、力偶矩就是力偶。
()二.电动机重P=500N.放在水平梁AC的中央.如图所示。
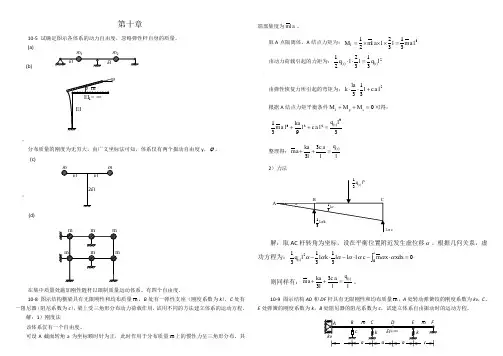

(a)A(a)O第10章 动能定理及其应用10-1 计算图示各系统的动能:1.质量为m ,半径为r 的均质圆盘在其自身平面内作平面运动。
在图示位置时,若已知圆盘上A 、B 两点的速度方向如图示,B 点的速度为v B ,θ = 45º(图a )。
2.图示质量为m 1的均质杆OA ,一端铰接在质量为m 2的均质圆盘中心,另一端放在水平面上,圆盘在地面上作纯滚动,圆心速度为v(图b )。
3.质量为m 的均质细圆环半径为R ,其上固结一个质量也为m 的质点A 。
细圆环在水平面上作纯滚动,图示瞬时角速度为ω(图c )。
解:1.222222163)2(2121)2(212121BB BC C C mv r v mr v m J mv T =⋅+=+=ω 2.222122222214321)(21212121v m v m r v r m v m v m T +=⋅++=3.22222222)2(212121ωωωωmR R m mR mR T =++=10-2 图示滑块A 重力为1W ,可在滑道内滑动,与滑块A 用铰链连接的是重力为2W 、长为l 的匀质杆AB 。
现已知道滑块沿滑道的速度为1v ,杆AB 的角速度为1ω。
当杆与铅垂线的夹角为ϕ时,试求系统的动能。
解:图(a )B A T T T +=)2121(21222211ωC C J v g W v g W ++=21221121212211122]cos 22)2[(22ωϕωω⋅⋅+⋅++++=l gW l l v l v l g W v g W]cos 31)[(2111221222121ϕωωv l W l W v W W g +++=10-3 重力为P F 、半径为r 的齿轮II 与半径为r R 3=的固定内齿轮I 相啮合。
齿轮II 通过匀质的曲柄OC 带动而运动。
曲柄的重力为Q F ,角速度为ω,齿轮可视为匀质圆盘。
试求行星齿轮机构的动能。


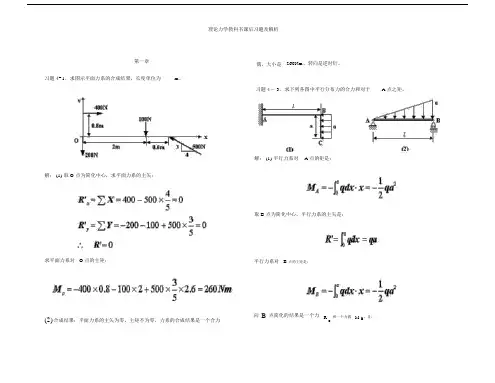
理论力学教科书课后习题及解析第一章偶,大小是260Nm,转向是逆时针。
.求图示平面力系的合成结果,长度单位为m1习题4-习题4-3.求下列各图中平行分布力的合力和对于A点之矩。
A点的矩是:(1) 解:平行力系对O(1) 解:取点为简化中心,求平面力系的主矢:B取点为简化中心,平行力系的主矢是:求平面力系对点的主矩:O 点的主矩是:B 平行力系对B RB向点简化的结果是一个力,且:M和一个力偶合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力(2) B.理论力学教科书课后习题及解析A,且:M向A点简化的结果是一个力如图所示;R和一个力偶A如图所示;将,使满足:d R向下平移一段距离B的大小等于载荷分布的其几何意义是:。
R最后简化为一个力R,大小等于R B,使满足:d R将向右平移一段距离A矩形面积,作用点通过矩形的形心。
A(2) 取点为简化中心,平行力系的主矢是:的大小等于载荷分布的R。
其几何意义是:RR最后简化为一个力,大小等于A三角形面积,作用点通过三角形的形心。
点的主矩是:A平行力系对.理论力学教科书课后习题及解析列平衡方程:。
.求下列各梁和刚架的支座反力,长度单位为习题4-4m解方程组:反力的实际方向如图示。
校核:解:(1) 研究AB杆,受力分析,画受力图:结果正确。
(2) 研究AB杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:理论力学教科书课后习题及解析(3) 研究ABC,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:列平衡方程:反力的实际方向如图示。
校核:解方程组:结果正确。
.理论力学教科书课后习题及解析反力的实际方向如图示。
校核:结果正确。
的约束反力A.重物悬挂如图,已知习题4-5G=1.8kN,其他重量不计;求铰链和杆BC所受的力。
列平衡方程:解方程组:BC是二力杆),画受力图:研究整体,受力分析((1) 解:反力的实际方向如图示。
理论力学教科书课后习题及解析第一章偶,大小是260Nm,转向是逆时针。
习题 4- 1.求图示平面力系的合成结果,长度单位为m。
习题 4- 3.求下列各图中平行分布力的合力和对于 A 点之矩。
解: (1) 平行力系对 A 点的矩是:解: (1) 取 O 点为简化中心,求平面力系的主矢:取 B 点为简化中心,平行力系的主矢是:求平面力系对O 点的主矩:平行力系对 B 点的主矩是:(2)合成结果:平面力系的主矢为零,主矩不为零,力系的合成结果是一个合力向B点简化的结果是一个力RB和一个力偶M B,且:如图所示;向 A 点简化的结果是一个力R A和一个力偶M A,且:如图所示;将 R B向下平移一段距离d,使满足:最后简化为一个力R ,大小等于R B。
其几何意义是: R 的大小等于载荷分布的将 R A向右平移一段距离d,使满足:矩形面积,作用点通过矩形的形心。
(2)取 A 点为简化中心,平行力系的主矢是:最后简化为一个力R,大小等于R A。
其几何意义是:R 的大小等于载荷分布的三角形面积,作用点通过三角形的形心。
平行力系对 A 点的主矩是:列平衡方程:习题 4-4 .求下列各梁和刚架的支座反力,长度单位为m。
解方程组:反力的实际方向如图示。
校核:解: (1) 研究 AB 杆,受力分析,画受力图:结果正确。
(2) 研究 AB 杆,受力分析,将线性分布的载荷简化成一个集中力,画受力图:(3) 研究 ABC ,受力分析,将均布的载荷简化成一个集中力,画受力图:列平衡方程:解方程组:列平衡方程:反力的实际方向如图示。
校核:解方程组:结果正确。
反力的实际方向如图示。
校核:结果正确。
习题 4-5 .重物悬挂如图,已知G=1.8kN ,其他重量不计;求铰链 A 的约束反力和杆 BC 所受的力。
列平衡方程:解方程组:解: (1) 研究整体,受力分析(BC 是二力杆),画受力图:反力的实际方向如图示。
列平衡方程:习题 4-8 .图示钻井架,G=177kN ,铅垂荷载P=1350kN ,风荷载 q=1.5kN/m ,水平力 F=50kN ;求支座 A 的约束反力和撑杆CD 所受的力。
理论力学课后习题答案-第10章--动能定理及其应用-)(a)v ϕABC rv 1v 1v 1ωϕ(a)CCωCvωO第10章 动能定理及其应用10-1 计算图示各系统的动能:1.质量为m ,半径为r 的均质圆盘在其自身平面内作平面运动。
在图示位置时,若已知圆盘上A 、B 两点的速度方向如图示,B 点的速度为v B ,θ = 45º(图a )。
2.图示质量为m 1的均质杆OA ,一端铰接在质量为m 2的均质圆盘中心,另一端放在水平面上,圆盘在地面上作纯滚动,圆心速度为v (图b )。
3.质量为m 的均质细圆环半径为R ,其上固结一个质量也为m 的质点A 。
细圆环在水平面上作纯滚动,图示瞬时角速度为ω(图c )。
解:1.222222163)2(2121)2(212121BBB CCCmv r v mr v m J mv T =⋅+=+=ω 2.222122222214321)(21212121v m v m r v r m v m vm T +=⋅++= 3.22222222)2(212121ωωωωmR R m mR mR T =++=10-2 图示滑块A 重力为1W ,可在滑道内滑动,与滑块A 用铰链连接的是重力为2W 、长为l 的匀质杆AB 。
现已知道滑块沿滑道的速度为1v ,杆AB 的角速度为1ω。
当杆与铅垂线的夹角为ϕ时,试求系统的动能。
解:图(a ) B AT T T +=)2121(21222211ωC CJ vgWv g W ++=21221121212211122]cos 22)2[(22ωϕωω⋅⋅+⋅++++=l gW l l v l v l g W v g W]cos 31)[(2111221222121ϕωωv l W l W v W W g +++=10-3 重力为P F 、半径为r 的齿轮II 与半径为r R 3=的固定内齿轮I 相啮合。
齿轮II 通过匀质的曲柄OC 带动而运动。
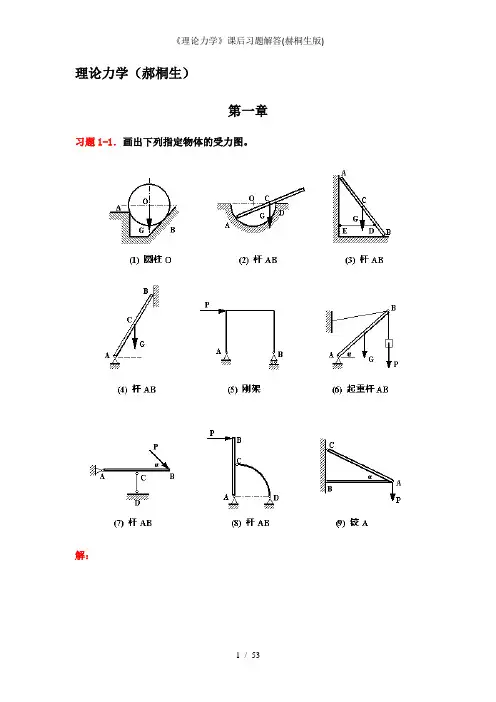
理论力学(郝桐生)第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1)研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
解:(1) 研究铰E,受力分析,画力三角形:由图知:(2) 研究铰C,受力分析,画力三角形:由图知:习题2-7.夹具中所用的两种连杆增力机构如图所示,书籍推力P作用于A点,夹紧平衡时杆AB与水平线的夹角为;求对于工件的夹紧力Q和当α=10o时的增力倍数Q/P。
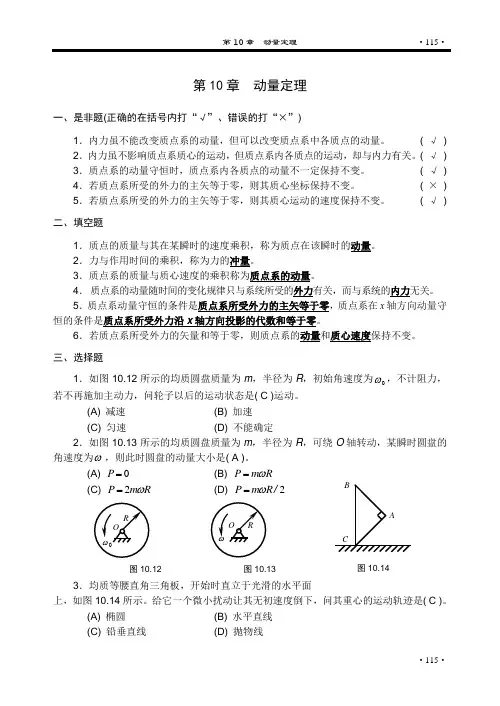
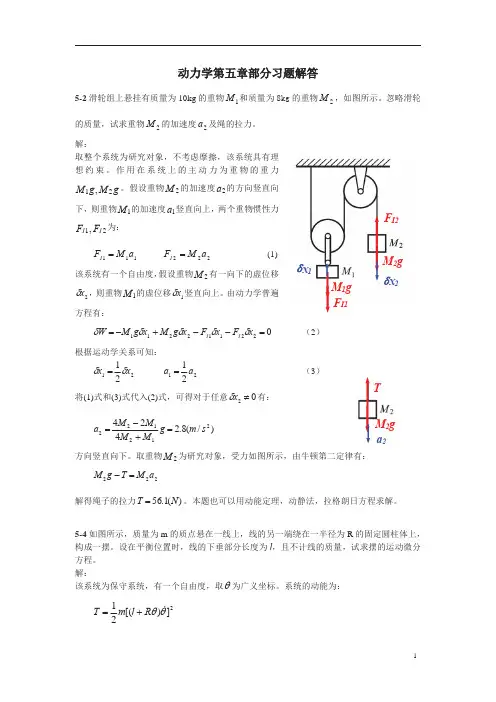
·115·第10章 动量定理一、是非题(正确的在括号内打“√”、错误的打“×”)1.内力虽不能改变质点系的动量,但可以改变质点系中各质点的动量。
( √ ) 2.内力虽不影响质点系质心的运动,但质点系内各质点的运动,却与内力有关。
( √ ) 3.质点系的动量守恒时,质点系内各质点的动量不一定保持不变。
( √ ) 4.若质点系所受的外力的主矢等于零,则其质心坐标保持不变。
( × ) 5.若质点系所受的外力的主矢等于零,则其质心运动的速度保持不变。
( √ ) 二、填空题1.质点的质量与其在某瞬时的速度乘积,称为质点在该瞬时的动量。
2.力与作用时间的乘积,称为力的冲量。
3.质点系的质量与质心速度的乘积称为质点系的动量。
4.质点系的动量随时间的变化规律只与系统所受的外力有关,而与系统的内力无关。
5.质点系动量守恒的条件是质点系所受外力的主矢等于零,质点系在x 轴方向动量守恒的条件是质点系所受外力沿x 轴方向投影的代数和等于零。
6.若质点系所受外力的矢量和等于零,则质点系的动量和质心速度保持不变。
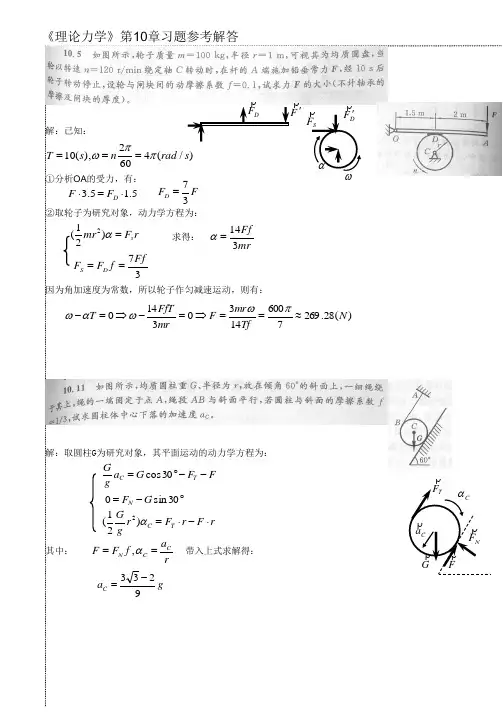
三、选择题1.如图10.12所示的均质圆盘质量为m ,半径为R ,初始角速度为0ω,不计阻力,若不再施加主动力,问轮子以后的运动状态是( C )运动。
(A) 减速(B) 加速(C) 匀速 (D) 不能确定2.如图10.13所示的均质圆盘质量为m ,半径为R ,可绕O 轴转动,某瞬时圆盘的角速度为ω,则此时圆盘的动量大小是( A )。
(A) 0P = (B) P m R =ω (C) 2P m R =ω(D) 2P m R /=ω图10.12 图10.133.均质等腰直角三角板,开始时直立于光滑的水平面上,如图10.14所示。
给它一个微小扰动让其无初速度倒下,问其重心的运动轨迹是( C )。
(A) 椭圆 (B) 水平直线 (C) 铅垂直线(D) 抛物线ABC图10.14·116·4.质点系的质心位置保持不变的必要与充分条件是( D )。
第一章测试1【单选题】(10分)二力平衡公理适用于A.流体B.变形体C.刚体D.刚体和变形体2【单选题】(10分)作用于刚体上三个相互平衡的力,若其中任何两个力的作用线相交于一点P,则其余的一个力的作用线必定A.交于同一点B.不一定交于同一点C.交于同一点,且三个力的作用线共面D.不通过P.3【单选题】(10分)作用与反作用力公理适用于A.仅变形体B.仅刚体C.刚体和变形体D.仅流体4【单选题】(10分)作用于刚体上的平衡力系,如果作用到变形体上,则变形体A.平衡B.不一定平衡C.不平衡【单选题】(10分)作用于变形体上的平衡力系如果作用到刚体上,则刚体A.不一定平衡B.不平衡C.平衡6【判断题】(10分)严格来说,只要通过所画的受力图采用以后的理论能得到正确的结果,所画的受力图就是正确的,只是有的会引入过多未知力,导致后续计算需要多列方程。
A.对B.错7【判断题】(10分)应用二力平衡公理和3力汇交定理目的是在解题的第一步就尽量减少未知量的数目,便于计算。
A.错B.8【判断题】(10分)若一个物体共有3个点受到平面力,其其中2个力汇交与一点,则画受力图时将第3个约束反力必然通过该交点。
A.错B.对9【判断题】(10分)画受力图时,根据约束特点,都是平行力,图中所有未知平行力的指向可以都假设与已知主动力的指向相同。
A.对B.错10【判断题】(10分)在画局部某个构件的受力图时,约束和力可以同时出现。
A.对B.错第二章测试1【判断题】(10分)平面力偶系能只能列2个独立方程。
A.错B.对2【判断题】(10分)力偶的矩与矩心选取有关A.对B.错3【判断题】(10分)平面力偶系可以列3个独立方程。
A.错B.对4【判断题】(10分)构成力偶的2个力,大小一定相同,方向相反,且两个力间的距离不等于0。
A.对B.错5【判断题】(10分)力偶在力投影方程中一定不会出现.A.错B.对6【判断题】(10分)力对任何矩心的力矩大小一定相等,转向一定相同。
《理论力学》课后习题解答(赫桐生,高教版)(总53页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第一章习题1-1.画出下列指定物体的受力图。
解:习题1-2.画出下列各物系中指定物体的受力图。
解:习题1-3.画出下列各物系中指定物体的受力图。
解:第二章习题2-1.铆接薄钢板在孔心A、B和C处受三力作用如图,已知P1=100N沿铅垂方向,P2=50N沿AB方向,P3=50N沿水平方向;求该力系的合成结果。
解:属平面汇交力系;合力大小和方向:习题2-2.图示简支梁受集中荷载P=20kN,求图示两种情况下支座A、B的约束反力。
解:(1) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:(2) 研究AB,受力分析:画力三角形:相似关系:几何关系:约束反力:习题2-3.电机重P=5kN放在水平梁AB的中央,梁的A端以铰链固定,B端以撑杆BC支持。
求撑杆BC所受的力。
解:(1)研究整体,受力分析:(2) 画力三角形:(3) 求BC受力习题2-4.简易起重机用钢丝绳吊起重量G=2kN的重物,不计杆件自重、磨擦及滑轮大小,A、B、C三处简化为铰链连接;求杆AB和AC所受的力。
解:(1) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆受拉,BC杆受压。
(2) 研究铰A,受力分析(AC、AB是二力杆,不计滑轮大小):建立直角坐标Axy,列平衡方程:解平衡方程:AB杆实际受力方向与假设相反,为受压;BC杆受压。
习题2-5.三铰门式刚架受集中荷载P作用,不计架重;求图示两种情况下支座A、B的约束反力。
解:(1) 研究整体,受力分析(AC是二力杆);画力三角形:求约束反力:(2) 研究整体,受力分析(BC是二力杆);画力三角形:几何关系:求约束反力:习题2-6.四根绳索AC、CB、CE、ED连接如图,其中B、D两端固定在支架上,A端系在重物上,人在E点向下施力P,若P=400N,α=4o,求所能吊起的重量G。
各章习题(计算题)部分答案第1章 略 第2章2-1 R 3284kN F .=,R cos()2063,.=︒F i ,R cos()1163,.=︒F j 2-2 3162kN T .=,30β=︒ 2-3 482.α=︒,R 496kN x F .= 2-4 11866N 50N x y F .F ==,2230N 40N x y F F ==-, 330N 60N x y F F ==, 44566N 566N x y F .F .==, 2-5 R 0F =2-6(a) 707kN 354kN 354kN Ax Ay B F .F .F .===,,(b) 05kN 5kN Ax Ay B F F F ===,,(c) 933kN 433kN 612kN Ax Ay B F .F .F .===,,(垂直于支撑面,指向简支梁) 2-7 min 15kN F =,N 25kN F =2-8 0866kN 05kN 1kN Ax Ay BD F .F .T ===,, 2-9 N N 1732kN 3464kN 15m A C F .F .AC .===,, 2-10 03436kN AB AC F F .==,2-11 BC F =,Ax F =,Ay F G = 2-12 N 65EF G F =+2-13 N N C D F F =2-14 231N 1155N 231N 845N AB AE BC BD F F .F F .====,,,2-15 (a) 33PF P F B Ay =-=,(b) P F F B A 32== (A F ,B F 方向相反,组成一力偶) (c) 0==B A F F2-16 1F,AB F,OA F =,7kN BC F =- 2-17 1905N 1905N 1905N 1905N Ax Ay Cx Cy F F F F =-===-,,, 2-18 3571N 3571N 3571N 3571N Ax Ay Cx Cy F F F F ==-=-=,,,·312··312·2-19 24kN m M =⋅,1155kN A B F F .== 第3章3-1 2400N Ax F =,1200N Ay F =,8485N BC F .= 3-2 R 0F'=,260N m O M =⋅ 3-3 (a) R F'qa =,221qa M O = (b) R12F'ql =,21ql q M O = 3-4(a) Ax F =,40kN Ay F =,120kN m A M =⋅,N C F = (b) 0=AxF ,25kN Ay F .=-,15kN By F =,D 25kN y F .=3-5 当60α=︒时,min 4AB PrF L= 3-6 0=Ax F ,qa F Ay2=,2qa M A =3-7 (a)2400N Ax F =,1000N Ay F =-,2400N Dx F =-,2000N Dy F = (b)2400N Ax F =-,1000N Ay F =-,2400N Dx F =,2000N Dy F =3-8 Ax F =,Ay F =,Bx F =,By F =3-9 rPLF Ax 2-=,P F Ay =,r PL F Bx 2=,P F By =,r PL F D 2=,P F C 2=3-10 R 32E F qa =-,qa F BD 22= 3-11 23kN Ax Cx F F .=-=-,1kN Ay Cy F F == 3-12 3PF AC -=,0=EF F ,32P F BD -= 3-13 2F F BC=,2F F DE = 第4章4-1 T 20kN F =,104kN OA F .=-,139kN OB F .=- 4-2 254kN m x M .=⋅,146kN m y M .=⋅,0=z M 4-3 0)(=P z M4-4 θαsin sin )(Pa M AB =P 4-5 3C A B WT T T ===4-6 1kN T =,0=Ax F ,750N Ay F =-,500N Az F =-,433N Bx F =,500N BZ F = 4-7 F F F -==61,F F =3,0542===F F F·313··313·4-8 321M a cM a b M +=,a M F Ay 3=,a M F Az 2=,0=Dx F ,a M F Dy 3-=,aM F Dz 2-= 4-9 4kN Ax F =,146kN Az F .=-,79kN Bx F .=,29kN Bz F .=-4-10 5kN Ox F =-,4kN Oy F =-,8kN Oz F =,32kN m Ox M =⋅,30kN m Oy M =-⋅,20kN m Oz M =⋅4-11 (a ) 10412kN N F .=,20213kN N F .=,30375kN N F .= 4-12 )(22221221r r r r x C --=,0=C y4-13 (a ) 589mm C x .=-,0=C y (b ) 797mm C x .=,349mm C y .= 4-14 )(22221221r r r r x C --=,0=C y4-15 0Ax F =,121(P )2Ay F P =-+,21P 2Az P F =+,0Cx F =,0Cy F =,22Cz P F =第5章5-1 min F =,s arctan f α= 5-2 )()m m sin +cos -P F αϕθϕ=,m θϕ=5-3 (1) A 先滑动,(2) A 、B 一起滑动 5-4 能保持平衡,S 201N F = 5-5 223.0=f5-6 3πarcsin 43πff α=+5-7 1s sin cos P F f αα=-,2s sin cos PF f αα=+,故21F F >5-8 min 845kN Q .= 5-9 435N P .=5-10 θ≤9926.︒5-11 120cm x >5-12 s 2(sin cos )Q R f L αα⋅+≤P ≤s 2(sin cos )Q Rf L αα⋅-5-13 min 1475N P .=5-14 4961N m .⋅≤C M ≤7039N m .⋅ 5-15 11cm b <5-16s s sin cos cos sin f Q f αααα-+≤P ≤s s sin cos cos sin f Q f αααα+- 5-17 arc ϕ=·314··314·5-18 500N P = 5-19 s f ≥15.0 5-20 75mm b .< 第6章6-1 (cos sin )x v lk kt kt =-,(cos sin )y v lk kt kt =-+; )sin (cos 2kt kt lk a x +-=,)sin (cos 2kt kt lk a y --= 6-2 (1) 0=s ;v R ω=;0a τ=,2n a R ω=(2) R s 23=;12v R ω=;2a ωτ=,2n 14a R ω= (3) R s =;0v =;2a R ωτ=-,n 0a =6-3 直角坐标法:t R x ω2cos =,t R y ω2sin =;2sin2x v R t ωω=-,2cos2y v R t ωω=; t R a x ωω2cos 42-=,t R a y ωω2sin 42-=自然坐标法:t R s ω2=;2v R ω=;0a τ=,2n 4a R ω= 6-4 ()sin M x l b t ω=+,()cos M y l b t ω=-;22221()()M M x y l b l b +=+-6.52222()1()x a y b l l-+=+6-6 22)sin (cos h t r l t r x B +-+=ωω,h y B -=6-7v =322xb u a -= 6-8 )cos sin arctan(00tr h tr ωωθ-=6-9 当0s t =时,157cm s M v ./=;0M a τ=,n2617cm s M a ./=当2s t =时,0M v =;2123cm s M a ./τ=-,n0M a =6-10 C x =C y =2C avv l=6-11 t e R t e y ωω222cos sin -+=;[cos v e t ωω=6-12 02cos4m x .t =;0566m s v ./=-;22263m s a ./=-6-13 0arctan rad v tbϕ=;02220rad s bv /b v t ω=+6-14 225t =ϕ;120m s v /=;236000m s n a /= 6-15 8rad s /ω=;2384rad s ./ε=-6-16 转轴O 的位置位于正方形的中心;1rad s /ω=,21rad s /ε=6-17 12C v r ω=;n 214C a r ω=,12C a r ετ=·315··315·6-18 12m s M v ./=;n 272m s M a ./=,206m s M a ./τ= 6-19 0377m s C v ./=6-20 2225000rad s /dεπ=;25922m s a ./= 6-21 32rad .ϕ=6-22 12mm h =6-23 02=ω,222r lb ωε-=6-24 02m s AB v ./=,2005m s AB a ./=;02m s C v ./=,n 20267m s C a ./=,2005m s C a ./τ=6-25 2012ωr a =,方向沿1AO ;2024ωr a =,指向轮心第7章7-1 x'vt =,cos()a kt y'ϕ=+,轨迹方程为cos()ky'a x'vϕ=+ 7-2 2cos M v R ωϕ=,方向水平向左 7-3 (a )2309rad s ./ω=; (b )2182rad s ./ω=7-4 (1)34OC v b ω=,34C lv v b=;(2)234K v a b = 7-5 当0ϕ︒=时,0v =;当30ϕ=︒时,100cm s v /=,向右;当90ϕ︒=时,200cm s v /=,向右7-6 126m s BC v ./=;2274m s BC a ./= 7-7 10cm s CD v /=;2346cm s CD a ./= 7-8 a a =7-9 3v ω=,方向向上7-10 1.732rad /s ω=,28.66rad /s ε=- 7-11 0.173m /s v =,20.05m /s a = 7-12 0.173m /s M v =,20.35m/s M a =7-13 πcos 15sin BC nr v αβ=7-14 23CD r v ω=;29310ωr a C D =7-15 a 3465mm s v ./=;21400mm s CD a /=第8章8-1 122v v r ω-=,122O v v v +=8-2 156cm s C v ./=,17cm s D v /=·316··316·8-3 877cm s C v ./=8-4 375rad s OB ./ω=,I 6rad s /ω=8-5 600mm s A v /=,200mm s B v /=,s C v /=;4rad s 3ABC /ω=,05rad s BD ./ω= 8-6 2rad s AB /ω=,2578rad s AB ./ε=-;667rad s BC ./ω=-,21926rad s BC ./ε=8-7 2()C A Rv a R r r=-,2Bx C a a τ=,2(2)()C By R r v a R r r -=- 8-8 2022ωr a B =,20211ωε=B O 8-9 032C v r ω=,20123ωr a C =8-10 01.15v l ω=8-11 16186rad s O C ./ω=,127817rad s O C ./ε=-8-12 s CD v /=,22m s 3CD a /= 8-13 n 2400cm s B a /=,21705cm s B a ./τ=-,21705cm s C a ./=-8-14 34e OC v v OB b ω==,OC ε=;12E v v =,E a = 8-15 21960mm s B a /=,298rad s AB ./ε=8-160C v ω,方向向左;rR B O 01ωω=,逆时针转向8-17 22()C Rv a R r =-,B a =8-18 n 202B a a ω=,2002)B a a ετ=-8-19 330ωω=B ;209)349(10ω+-=B a 8-20 2m s B v /=,2828m s C v ./=,28m s B a /=,21131m s C a ./= 第9章9-1 rgf=max ω 9-2 min 67r min n /=9-3 1v =9-4 0cos cos sin v x b kt kt k α=+,0sin sin vy kt kα=9-5 0cos x v t α=,201sin 2y v t gt α=+·317··317·9-6 0(1e )kt v s k-=- 9-7 202s t .=,707m s .= 9-8 172N F .=9-9 )(22g a amL F AC +=ω,)(22g a a mL F BC -=ω9-10 max 584kN F .=,min 536kN F .=9-11 g f f a ααααsin cos cos sin -+=,N cos sin W F f αα=- 9-12 )cos 1(200t m F t x ωωυ-+=第10章10-1 (a ) 12p mL ω=,方向水平向右;(b ) p mR ω=,方向水平向右;(c ) p me ω=,方向垂直于OC 的连线;(d ) C p mv =,方向水平向右10-2 30N x F =10-3 11221022a gP P P P F -++= 10-4 11r 12m v v v m m =++10-5 0(sin cos )v t g f'αα=-10-6 12(54)2l p m m ω=+,方向与曲柄垂直且向上 10-7 t m m l m x m m kx ωωsin 1211+=++10-8 2R s =10-9 (1) 3123123(22)cos ,2()C P L P P P L tx P P P ω+++=++ (2) 12123(2)sin ;2()C P P L t y P P P ω+=++2321max 222ωL gP P P F Ox ++=10-10 椭圆 2224l y x =+10-11 (1) 2sin G Wx l t P W Gω+=++ (2) 2m a x 2x G W F l g ω+=10-12 向右移377cm . 10-13 33(sin )cos ox R F m g m a r θθ=+,1233()(sin )sin oy RF m g m g a m g m a rθθ=+-++ 10-14 21212)(m m gm m f b m a ++-=·318··318·10-15 17cm A s =,向左移动;9cm B s =,向右移动 10-16 2max12(2)2ox r F F G G gω=++10-17 24(cos sin )3Ox mR F ωϕεϕπ=-+,24(sin cos )3Oy mR F mg ωϕεϕπ=+- 第11章11-1 (a ) ω2031ml L =,(b ) ω2021mR L =,(a ) ω2023mR L =11-2 208m s a ./=,2862kN T F .=,4626kN Oy F .=11-3 (1) ωωω22231ml mR Ml L O ---=,(2) ωω2231ml Ml L O --=11-4 θω22sin )312(l M m L O +=11-5 480r min n /=11-6 022ωωmr J ma J z z ++=11-7 0N 0Pr F fgt ω= 11-8 211212122()()R M R M'm m R R ε-=+11-9 )()(2212J i J gPR R PR Mi a ++-=11-10 t P P gkl)3(3cos210+=δϕ11-11 gR RW g J R W M a 2101sin +-=α,1T 1sin W F W a g α=+ 11-12 g J r m r m r m r m O++-=2222111122ε11-13 g R m r R m r R m a )()()(2222121ρ++++=,)()()(22221212ρρ+++-=R m r R m g m m Rr F11-14 v =T 13F mg =11-15 θsin 74g a =,θsin 71mg F -= 11-16 g a C 355.0=11-17 3)(2121m m gm m f F a ++-=·319··319·11-18 gr M R m r m R fm r m a 2222121ρ++-=,T 11A F m g m a =-,2T 2B m RF fm g a r=+11-19 2N 22sin 12D QL F a Lα=+,αcos g a Cx =,22212sin 12L a g a a Cy +=α 11-20 N 3633N B F .=11-21 P F F x O x O 516.021==,P F y O 434.11=,P F y O 164.12=第12章12-1 )cos 1(0ϕ+=mgr W AB ,)sin (cos 0θϕ-=mgr W AC 12-2 129904J F W .=,10500J f W =- 12-3 12206J W .=-,23206J W .=,031=W 12-4 (a) 2216T ml ω=,(b) 2234T mR ω=,(c) 2214T mR ω=,(d) 234C T mv =,12-5 10J W =重,503J W .=重12-6 θω222sin 61ml T = 12-7 21s s hf += 12-8 2122)cos (sin 2m m f gr m M r++-=ααϕϕω12-9 v=12-10 A v =12-11 A v =12-12 v =11/sin M R W a g W Wα-=+12-13 C v =45C a g =12-14 98N F .= 12-15 θωsin 3632121l g m m m m ++=,θεcos 23632121lgm m m m ++=12-16 C v =321321843)43(m m m gm m m F +++=12-17 (1) 2211)3()sin (2Rm m gR m M +-=αε, (2) R m m gR m M m F Ox )3(2)2sin cos 6(2121++=αα; ααsin )3()sin 3(21212⋅+++=Rm m gR m M m g m F Oy·320··320·12-18 v =m khmg a 34-=,41s 36F kh mg =+ 第13章13-1 αsin 32g a =13-2 g a 32=,T 3WF =13-3 Q P Pg a 322+=,QP PQF 32+=13-4 g P T a 3cos 2α=,N sin F P T α=-,s 1cos 3F T α= 13-5 22233cos sin 3()sin 2b a g b a ϕϕωϕ-=-13-6 445N ADF .=,54N BE F =13-7 2222(sin )cos sin J mr mr M ϕϕϕϕϕ++= 13-8 2222143)2(43ωr m gr m m M -+=,2143ωr m F Ox -=,4)2()(22121ωr m m g m m F Oy +-+= 13-9 0β=︒时,2329N Ax F =-,1382N Bx F =,1962N Ay By F F .==180β=︒时,12238N Ax F .=,592N Bx F =-,1962N Ay By F F .==13-10 2023ωmr F Ax -=,mgr F Ay =,20221ωmr F Bx =,mgr F By =13-11 g a a C x C 1712==,mg F 175= 13-12 l g 791=ε,lg 732-=ε,0=Ox F ,mg F Oy 72=第14章14-1 ctg 2P /Q /ϕ= 14-2 (3ctg 2)Ax F /P θ=14-3 A F P /=14-4 ctg Q P θ= 14-5 450N Q P /==14-6 12F F l =/2(cos )a ϕ14-7 05kN 21kN m Ax Ay A F F m ===⋅,,14-8 1866kN P .=14-9 2()F lx a k b=+14-10 2(kN)Ax F =, 3.804(kN)Ay F =,24(kN m)A M =-⋅,18.588(kN)B F =。