数控系统伺服驱动优化方法
- 格式:doc
- 大小:215.50 KB
- 文档页数:12
如何提高伺服电机的响应速度和精度在现代工业自动化领域中,伺服电机扮演着至关重要的角色。
无论是在数控机床、机器人系统,还是在自动化生产线等各种应用场景中,其响应速度和精度都直接影响着整个系统的性能和产品质量。
因此,如何有效地提高伺服电机的响应速度和精度,成为了众多工程师和技术人员关注的焦点问题。
要提高伺服电机的响应速度和精度,首先需要从电机的选型入手。
不同类型和规格的伺服电机在性能上存在着较大的差异。
在选择时,需要充分考虑应用场景的具体需求,如负载特性、运动速度、精度要求等。
一般来说,具有高转速、大扭矩、低转动惯量的电机,往往能够提供更快的响应速度和更高的精度。
电机的驱动器对于其性能的发挥也起着关键作用。
优质的驱动器能够提供更精确的电流控制和更快速的信号处理,从而有效地提高电机的响应速度和精度。
在选择驱动器时,需要关注其控制算法的先进性、带宽、分辨率等参数。
先进的控制算法可以更好地应对复杂的负载变化和动态响应要求,高带宽和高分辨率则能够实现更精细的控制。
机械传动系统的设计和优化同样不可忽视。
不合理的传动结构会引入间隙、摩擦和弹性变形等问题,从而影响电机的响应速度和精度。
例如,采用高精度的滚珠丝杠、直线导轨等传动部件,可以减少传动误差,提高系统的刚性和稳定性。
同时,合理的减速比设计也能够在满足扭矩要求的前提下,提高电机的转速和响应速度。
控制系统的参数整定是提高伺服电机性能的重要环节。
通过调整位置环、速度环和电流环的增益参数,可以优化系统的动态响应特性。
一般来说,增加位置环增益可以提高位置精度,增加速度环增益可以加快速度响应,增加电流环增益可以增强电机的输出扭矩。
但需要注意的是,增益参数的调整需要在稳定性和响应速度之间进行平衡,过大的增益可能会导致系统振荡,反而降低性能。
传感器的精度和响应速度也会对伺服电机的性能产生影响。
高精度的编码器能够提供更准确的位置和速度反馈信息,使控制系统能够更精确地控制电机的运动。
高端数控机床运动控制系统设计与优化随着科技的不断发展,高端数控机床在制造业中扮演着重要的角色。
高精度、高刚度和高速度的要求使得数控机床的运动控制系统设计与优化变得至关重要。
本文将探讨如何设计和优化高端数控机床的运动控制系统,以实现更高的性能和效率。
首先,数控机床的运动控制系统由伺服电机、驱动器和运动控制器组成。
正确选择和设计这些组件是实现高性能控制的关键。
伺服电机的选择应考虑到功率、转速范围和动态响应等因素。
驱动器的选择应与伺服电机适配,并具有高精密度和快速响应的特点。
运动控制器的选择应考虑到控制算法的优化和实时性能的需求。
其次,对于高端数控机床的运动控制系统来说,精确的运动轨迹控制是至关重要的。
在设计过程中,应将运动控制系统划分为多个子系统,并针对每个子系统进行优化。
例如,位置控制子系统可以采用PID控制算法,并通过增加反馈传感器的数量来提高控制精度。
速度控制子系统可以采用先进的误差补偿算法,如预测控制和模型预测控制,以提高动态响应和防止运动过冲。
加速度控制子系统可以通过优化运动轨迹来减少机床振动和加速度的非线性变化。
此外,实时性是高端数控机床运动控制系统设计与优化中的关键问题之一。
为了实现快速响应和高精度控制,设计人员应选择高性能的运动控制器和精密的传感器,并采用快速采样和实时控制算法。
此外,还可以应用并行处理和分布式控制等技术来提高系统的实时性能。
另外,稳定性和可靠性是任何高端数控机床运动控制系统设计与优化过程中应关注的重要问题。
为了确保系统运行的稳定性,应进行系统的建模和仿真,并对系统的各个方面进行全面的测试和验证。
此外,还应采取合适的故障检测和容错技术来提高系统的可靠性和容错能力。
最后,为了进一步优化高端数控机床的运动控制系统,可以采用智能化和自适应控制技术。
智能化技术可以通过学习算法和智能优化方法来提高系统的性能和稳定性。
自适应控制技术可以根据工件的特性和加工条件来调整控制参数,以实现最佳加工效果。
数控系统伺服驱动器接线及参数设定数控系统是一种实现数控机床运动控制的系统,它通过数控程序控制伺服驱动器驱动电机实现机床各轴的精确定位和运动控制。
正确的接线和参数设定对于数控系统的稳定运行和良好性能至关重要。
一、数控系统伺服驱动器接线1.电源线接线:将电源线的两根火线分别接入伺服驱动器的AC1和AC2端口,将零线接入伺服驱动器的COM端口。
2.电动机线接线:将电动机的三根相线分别接入伺服驱动器的U、V、W端口,注意保持相序正确。
3.编码器线接线:将编码器的信号线分别接入伺服驱动器的A相、B相和Z相端口,注意保持对应关系。
4.I/O信号线接线:将数控系统的输入信号线分别接入伺服驱动器的I/O端口,将数控系统的输出信号线分别接入伺服驱动器的O/I端口。
二、数控系统伺服驱动器参数设定伺服驱动器的参数设定包括基本参数设定和运动参数设定。
1.基本参数设定:包括电源参数设定、电机参数设定和编码器参数设定。
-电源参数设定:设置电源电压和频率等基本参数,确保电源供电稳定。
-电机参数设定:设置电机类型、额定电流、极数等参数,确保驱动器与电机匹配。
-编码器参数设定:设置编码器型号、分辨率等参数,确保编码器信号精确反馈。
2.运动参数设定:包括速度参数设定、加速度参数设定和位置参数设定。
-速度参数设定:设置速度环的比例增益、积分增益和速度限制等参数,确保速度控制精度。
-加速度参数设定:设置加速度环的比例增益、积分增益和加速度限制等参数,确保加速度控制平稳。
-位置参数设定:设置位置环的比例增益、积分增益和位置限制等参数,确保位置控制准确。
3.其他参数设定:包括滤波参数设定、限位参数设定和插补参数设定等。
-滤波参数设定:设置滤波器的截止频率和衰减系数等参数,确保驱动器与电机的振动减小。
-限位参数设定:设置限位开关的触发逻辑和触发动作等参数,确保机床在限位时及时停止。
-插补参数设定:设置插补周期、插补梯度和插补速度等参数,确保插补运动的平滑与快速。
伺服驱动器参数设置方法伺服驱动器是现代工业自动化控制系统中的重要组成部分,它能够精确控制电机的转速和位置,广泛应用于数控机床、印刷设备、包装设备、纺织设备等领域。
正确的参数设置对于伺服驱动器的性能和稳定性至关重要。
本文将介绍伺服驱动器参数设置的方法,帮助用户更好地使用伺服驱动器。
1. 确定电机参数。
在进行伺服驱动器参数设置之前,首先需要确定电机的参数,包括额定转速、额定电流、电机型号等。
这些参数将直接影响到伺服驱动器的参数设置,确保参数的准确性是非常重要的。
2. 设置速度环参数。
速度环参数是伺服驱动器中最基本的参数之一,它直接影响到伺服系统的速度响应和稳定性。
在设置速度环参数时,需要根据实际应用情况调整比例增益、积分时间和微分时间等参数,以达到最佳的速度控制效果。
3. 设置位置环参数。
除了速度环参数之外,位置环参数也是伺服驱动器中非常重要的参数。
位置环参数的设置将直接影响到伺服系统的位置精度和稳定性。
在设置位置环参数时,需要根据实际应用情况调整比例增益、积分时间和微分时间等参数,以达到最佳的位置控制效果。
4. 调整过流保护参数。
过流保护是伺服驱动器中非常重要的保护功能,它能够有效地保护电机和驱动器免受过载和短路的损坏。
在设置过流保护参数时,需要根据电机的额定电流和实际负载情况进行调整,确保过流保护参数的准确性和可靠性。
5. 调整过压保护参数。
过压保护也是伺服驱动器中非常重要的保护功能,它能够有效地保护电机和驱动器免受电源过压的损坏。
在设置过压保护参数时,需要根据电机的额定电压和实际电源情况进行调整,确保过压保护参数的准确性和可靠性。
6. 调整过速保护参数。
过速保护是伺服驱动器中非常重要的保护功能,它能够有效地保护电机和驱动器免受过速运行的损坏。
在设置过速保护参数时,需要根据电机的额定转速和实际运行情况进行调整,确保过速保护参数的准确性和可靠性。
总结。
通过正确的参数设置,可以使伺服驱动器在工业自动化控制系统中发挥更好的性能和稳定性。
数控机床伺服参数调整方法作者:李亚聪康亚彪来源:《科技创新导报》2020年第02期摘; ;要:现阶段,我国的工业发展较为迅速,产品的质量和数量都在不断提升,所以对数控机床提出了新的要求。
在数控机床的实际生产中,许多伺服参数的调整仍然不是十分完善,制约了机床的生产精度,对机床加工质量带来不利影响。
本文将从伺服系统的调整原则、顺序以及方法这三个方面进行阐述,旨在对我国数控机床伺服参数的调整提供借鉴。
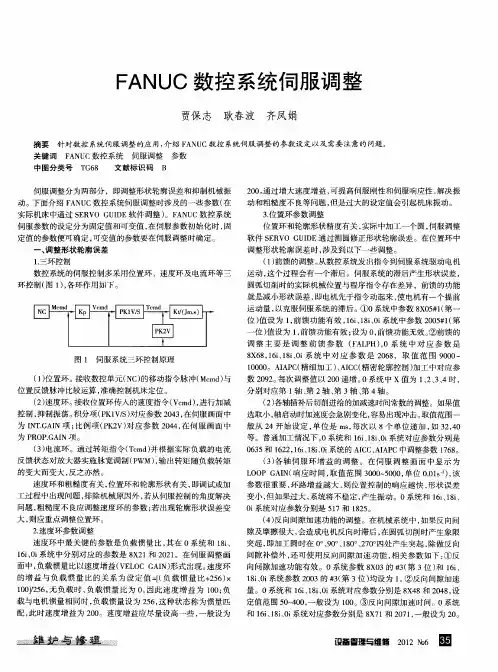
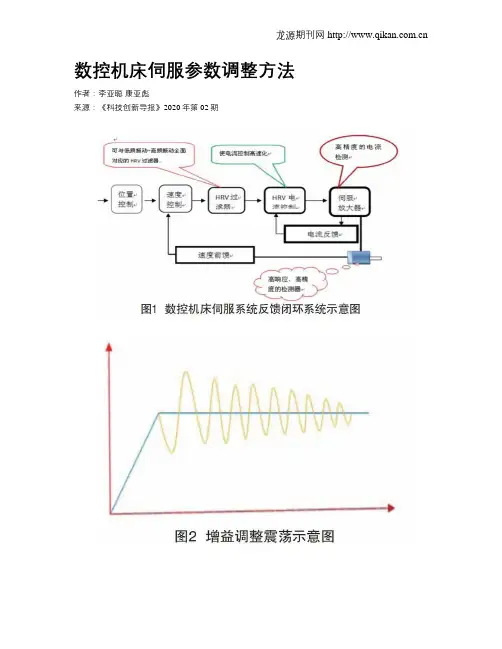
关键词:数控机床; 伺服; 振荡; 参数调控中图分类号:TP659; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ; ;文献标识码:A; ; ; ; ; ; ; ; ; ; ; ;文章编号:1674-098X(2020)01(b)-0066-021; 伺服系统参数调整原则伺服系统通常由三个反馈系组成,分别为位置环、速度环以及电流环,具体如图1所示。
1.1 位置环增益位置环增益是重要的参数,对机床的工作具有重要的作用。
位置环增益越大,那么当位置指令输入过后电机响应速度也会更快,进行位置跟踪会更加准确,运动部件定位会更加及时。
系统在执行指令的过程中,相应指令运转的部件会收到较大的冲力,所以也就对部件的刚性质量提出了更高的要求。
相对于高增益,位置环增益越小,伺服系统也会更加平稳,虽然如此,但是不能过分追求低增益,否则就会带来更高的使伺服系统跟踪误差,最终在工件加工时在加工轨迹上产生误差。
为了加强机床的刚性,减少跟随误差,尽可能加快定位速度,就要适当提高位置环设定值,但是应当保持在一定范围内,否则就会带来振动,降低工作质量。
1.2 速度环增益速度环增益一般用于调整速度环的反应速度。
如果增加一定量的速度环增益,那么机床的振动幅度也会更加剧烈,不利于实际工作。
所以,要确定机械部件的振动上限,在这个上限值以下来调整速度环增益,以提升反应速度。
在速度环增益设定的过程中,若缺乏合理的数据支持,就会带来偏差,导致静态误差的产生。
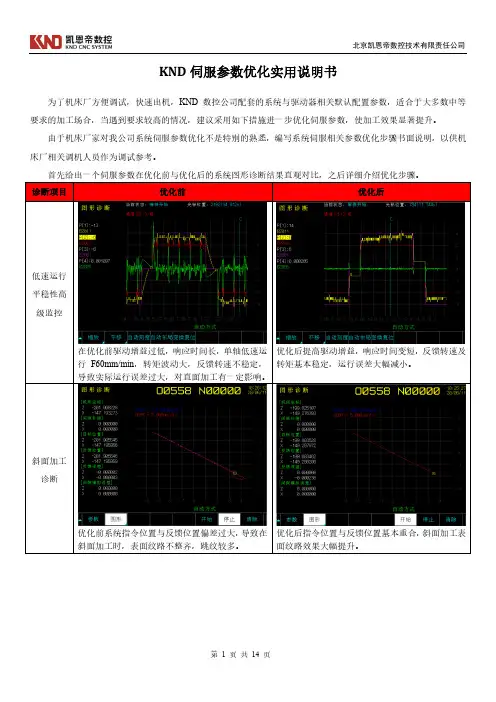
KND伺服参数优化实用说明书为了机床厂方便调试,快速出机,KND数控公司配套的系统与驱动器相关默认配置参数,适合于大多数中等要求的加工场合,当遇到要求较高的情况,建议采用如下措施进一步优化伺服参数,使加工效果显著提升。
由于机床厂家对我公司系统伺服参数优化不是特别的熟悉,编写系统伺服相关参数优化步骤书面说明,以供机床厂相关调机人员作为调试参考。
首先给出一个伺服参数在优化前与优化后的系统图形诊断结果直观对比,之后详细介绍优化步骤。
在优化前驱动增益过低,响应时间长,单轴低速运行F60mm/min,转矩波动大,反馈转速不稳定,导致实际运行误差过大,对直面加工有一定影响。
优化后提高驱动增益,响应时间变短,反馈转速及转矩基本稳定,运行误差大幅减小。
优化前系统指令位置与反馈位置偏差过大,导致在斜面加工时,表面纹路不整齐,跳纹较多。
优化后指令位置与反馈位置基本重合,斜面加工表面纹路效果大幅提升。
优化前系统指令位置与反馈位置偏差过大,导致在圆弧加工时表面纹路不好,过象限处尖角过大,真圆度变差。
优化后指令位置与反馈位置基本重合,圆弧尖角明显收短,表面纹路提升,真圆度变好。
、锥面加工纹路效果提升驱动参数优化调试步骤目的:在工件表面纹路要求较高的场合,尽量提高伺服的响应性,选择合适的刀具,切削转速、进给量、精车余量来保证,就如何优化伺服参数参考以下步骤:第一步:确认电机型号是否正常匹配。
第二步:确认驱动增益参数与摩擦补偿系数参数为默认状态(重要的步骤看3遍)。
第三步:XZ轴运行到中间合适位置,各轴分别做惯量自学习(TU1)。
操作步骤【录入方式】→按【参数】两次进入伺服参数页面→选择需要学习的伺服→按【操作】键→按【学习惯量】软键→按【确定】软键,自动学习完成。
第四步:进行振动频率检出:(1)【录入方式】→按【诊断】键,进入诊断页面如下:(2)按【图形诊断】软键,进入如下页面:(3)按【振动检测】软键,进入振动频率检测页面:(4)按【参数设定】软键,输入需要检测的轴名,按【完成】即可。
数控机床通常包含了数控系统、伺服驱动器、伺服电机以及机械部件等。
在前期方案设计时,为了使数控机床的加工精度及效率达到最优,需要选择适合运动规划需求的数控系统和满足机械特性需求的电机。
伺服电机虽然是直接执行部件,但和数控系统一样,自身无法直接驱动机械部件运动,均需要通过伺服驱动器来实现最终的运动控制需求。
然而,不同的运动规划和加工工艺,对于驱动器参数的调试影响很大;不同的机械结构和加工误差,对驱动器的滤波处理等参数有不一样的需求。
所以,为了最终能同时实现更好的加工精度和更快的加工效率,在设备调试过程中,尤其是在对批量机床的参数统一化过程中,对伺服驱动器的优化便显得尤其重要。
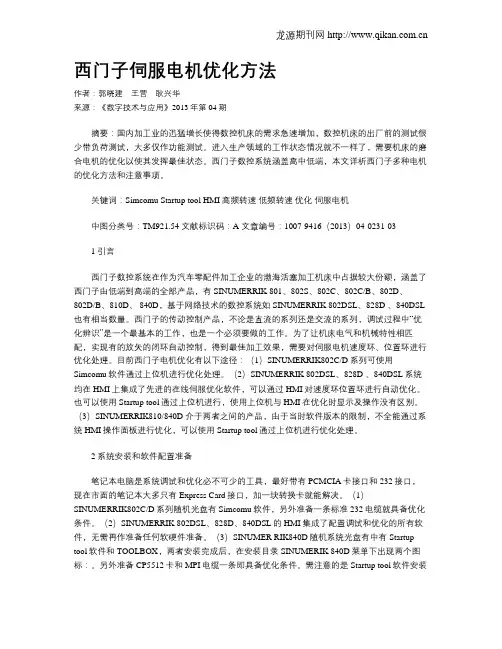
菲仕伺服驱动器的介绍及特征全新的AxN系列通用伺服驱动系统(图1)是菲仕自主创新的最新成果。
它是菲仕中国吸收了意大利菲仕15年运动控制经验后,结合8年中国市场实践,自主研发,为中国制造业转型升级而专门打造的全新一代高性能伺服驱动器。
其电流输出能力覆盖15A到150A,可使用CANopen、EtherCAT和Modbus等多种现场总线,支持海德汉ENDAT 2.2编码器、西克Hiperface编码器、正余弦编码器、数字增量式编码器和霍尔传感器多种主流编码器。
图1 AxN系列通用伺服驱动系统AxN全数字交流伺服驱动器主要特性:⑴更紧凑的外形。
对比上一代产品,体积缩小16%~20%,重量减轻25%~35%。
⑵更灵活的安装。
支持柜内安装、穿墙安装和冷却板安装,穿墙安装时散热器外置,无需在电气柜内安装空调等降温设备,更节约成本;冷却板安装时支持外置水冷,帮助驱动器发挥优异性能。
⑶更智能的运行。
驱动器内置PLC,编程符合IEC61131-3标准,可在多种应用场合脱离上位机直接运行,实现电子凸轮、电机参数自适应等多种功能,节约成本。
⑷更稳定的品质。
出厂前经过振动、短路、高低温、过载等9大严格测试,确保AxN系列驱动器能在多种恶劣环境下稳定运行。
数控机床性能参数分析与优化数控机床是现代制造业的关键设备之一,它的性能参数对于工件的加工精度、质量和效率具有重要影响。
本文将介绍数控机床的性能参数,分析其影响因素和优化方法,以提高数控机床的加工效率和质量。
一、数控机床的性能参数数控机床的性能参数包括机床精度、重复定位精度、加工速度、加工精度等。
其中,机床精度是指机床的几何形状精度和位置精度,反映了机床的制造水平和装配质量;重复定位精度是指机床在连续多次加工同一位置时的精度误差,反映了机床的维护和调整水平;加工速度是指机床加工的速度和进给速度,反映了机床的快速定位和运动能力;加工精度是指机床加工的尺寸精度和形状精度,反映了机床的加工能力和工件质量。
二、数控机床性能参数的影响因素数控机床的性能参数受多种因素影响,包括机床结构、主轴系统、导轨系统、伺服系统、控制系统等。
其中,机床结构对几何形状精度和位置精度有重要影响,主轴系统对加工速度和加工精度有重要影响,导轨系统对位置精度和加工精度有重要影响,伺服系统对加工速度和加工精度有重要影响,控制系统对机床加工的精度和稳定性有重要影响。
三、数控机床性能参数的优化方法为了提高数控机床的性能参数,需要从多个方面入手,包括机床结构、主轴系统、导轨系统、伺服系统、控制系统等。
1. 机床结构优化机床结构优化是提高机床几何形状精度和位置精度的关键。
在机床设计和制造过程中,需要加强对机床刚性、精度和稳定性的控制,采用可靠的连接和调整装置,保证机床各部件的精度和稳定性。
此外,还需要进行机床的动态特性分析,优化机床的结构参数和布局,提高机床的工作效率和稳定性。
2. 主轴系统优化主轴系统优化是提高机床加工速度和加工精度的关键。
在主轴系统设计和制造过程中,需要加强对主轴系统的刚性、平衡和精度的控制,采用高性能陶瓷轴承和高精度电机,提高主轴系统的旋转速度和动态精度。
此外,还需要进行主轴系统的动态特性分析和设计,降低主轴系统的振动和噪声,提高主轴系统的工作效率和可靠性。
西门子伺服电机优化方法作者:郭晓建王营耿兴华来源:《数字技术与应用》2013年第04期摘要:国内加工业的迅猛增长使得数控机床的需求急速增加,数控机床的出厂前的测试很少带负荷测试,大多仅作功能测试。
进入生产领域的工作状态情况就不一样了,需要机床的磨合电机的优化以使其发挥最佳状态。
西门子数控系统涵盖高中低端,本文详析西门子多种电机的优化方法和注意事项。
关键词:Simcomu Startup tool HMI 高频转速低频转速优化伺服电机中图分类号:TM921.54 文献标识码:A 文章编号:1007-9416(2013)04-0231-031 引言西门子数控系统在作为汽车零配件加工企业的渤海活塞加工机床中占据较大份额,涵盖了西门子由低端到高端的全部产品,有SINUMERRIK 801、802S、802C、802C/B、802D、802D/B、810D、 840D,基于网络技术的数控系统如SINUMERRIK 802DSL、828D 、840DSL 也有相当数量。
西门子的传动控制产品,不论是直流的系列还是交流的系列,调试过程中“优化辨识”是一个最基本的工作,也是一个必须要做的工作。
为了让机床电气和机械特性相匹配,实现有的放矢的闭环自动控制,得到最佳加工效果,需要对伺服电机速度环、位置环进行优化处理。
目前西门子电机优化有以下途径:(1)SINUMERRIK802C/D系列可使用Simcomu软件通过上位机进行优化处理。
(2)SINUMERRIK 802DSL、828D 、840DSL系统均在HMI上集成了先进的在线伺服优化软件,可以通过HMI对速度环位置环进行自动优化。
也可以使用Startup tool通过上位机进行,使用上位机与HMI在优化时显示及操作没有区别。
(3)SINUMERRIK810/840D 介于两者之间的产品,由于当时软件版本的限制,不全能通过系统HMI操作面板进行优化,可以使用Startup tool通过上位机进行优化处理。
一.驱动优化的必要性:数控系统的主要功能是把编制的NC 程序转变成相应的轴的机械位移,在轴位移的过程中,好的动态特性和稳定性是驱动稳定高效运行的关键。
特别在模具的高速加工中,要求系统有良好的动态和静态特性。
一般在机床调试时系统会给定一组相应轴的默认参数,但这些参数一般是为了保证系统正常运行的比较保守参数,驱动优化的目的是在现有的基础上尽可能提高系统的动态性。
二.驱动轴的结构:根据上图的机械结构可以看出来,实际的机床运动链是电机根据系统的运动指令位移相应的角度,电机的旋转运动经过连轴节转递到丝杠,丝杠又通过和工作台连接在一起的丝母把旋转运动转变成工作台的直线运动。
下图是轴的给定值和实际值的曲线图,从图可以看出来,给定值和实际值之间有一个差值,这个差值是因为系统的惯性和连接元件中的弹性变形引起的,这个差值就是系统的动态误差的主要组成部分。
影响系统的动态特性主要有以下几个方面:直线移动部分的质量,比如工作台和工件的大小。
旋转移动部分的惯性。
摩擦力,主要有工作台导轨之间,丝杠和丝母之间的摩擦力。
这些东西在机床设计以后就定下来了,所以大型机床的动态特性很难和中小型的机床比,同时机床的润滑情况也会影像系统的动态特性。
除了这些外,连接元件中的弹性变形也是影响系统动态性能的关键因素,比如连轴节等,一般说来,系统的刚性越好,系统的动态特性就越好,所以在优化之前先尽量在机械方面提高系统的刚性,比如检查去联轴节的连接,丝杠的间隙等。
下面是机床结构的简化图。
Position [mm]Time [s]10100从图上可以看出,电机的输出传递到工作台也就是负载上时要经过中间一些传递环节,对应传递环节的输出和输入比就是传递函数。
从理论上讲,一个理想的驱动传递函数是一个纯线性环节,只有这样,输出的会真实的跟随输入,但实际上在传递环节中存在好多的弹性环节,所以一个近似的传递环节可以简化为一个线性环节和一个弹性环节的组合,并且弹性环节部分的频率常常是好多的频率组合起来的。
三菱数控伺服驱动参数设定与调整作者:陈泽南来源:《佛山陶瓷》2012年第07期摘要:本文分析了三菱数控伺服驱动控制原理及相关伺服参数作用与关系,阐述了伺服驱动参数调整要领及相关伺服驱动参数设定与调整方法。
实践证明,通过对伺服驱动参数的最佳化调整,解决了铣面光洁度差、加工面有刀痕等问题。
关键词:三菱数控;伺服驱动参数;调整1 引言数控机床伺服驱动参数调整的好坏,直接影响到机床的加工精度和性能。
很多数控机床在出厂前,都进行过伺服驱动参数基本设定,能满足一般精度的加工要求。
但在动态性能要求高的模具加工中,由于伺服驱动参数没有进行最佳调整,造成电气系统与机械特性匹配不合理,导致加工中出现质量问题。
例如,铣球面光洁度差、加工圆弧呈椭圆、加工面在象限切换处出现刀痕等等。
根据三菱数控系统的特点,笔者总结了伺服驱动参数调整要领及伺服驱动参数设定与调整方法。
2 伺服驱动参数分析三菱伺服驱动控制原理如图1所示。
三菱伺服驱动系统采用图1所示的三环控制方式。
整个控制流程是通过位置环到速度环,再到电流环,最终到伺服电机。
而伺服电机则将电流信号和速度信号分别反馈给电流环和速度环、位置环,从而实现快速、准确的运动控制。
2.1 电流环电流环的作用是限制最大电流,使系统有足够大的加速扭矩。
电流环控制参数主要包含电流回路q轴进给补偿#2209、电流回路d轴进给补偿#2210、电流回路q 轴增益#2211、电流回路d轴增益#2212,这些参数由伺服电机的电气特性决定的,根据电机型号设定相对应的标准值。
2.2 速度环速度环的作用是抑制速度波动,增强系统抗负载扰动的能力。
速度环控制参数主要有:速度回路增益1(#2205,简称:VGN1)、速度回路增益2(#2206,简称:VGN2)、速度回路延迟补偿(#2207,简称:VIL)、速度回路进给补偿(#2208,简称:VIA)。
速度回路增益1,是决定伺服控制响应性的重要参数,对机床的切削精度和切削循环时间有很大的影响,增大设定值则控制精度相应提高,但机械容易发生振动。
伺服驱动器重要参数的设置方法和技巧随着市场的发展和国内功率电子技术、微电子技术、计算机技术及控制原理等技术的进步,国内数控系统、交流伺服驱动器及伺服电动机这两年有了较大的发展,在某些应用领域打破了国外的垄断局面。
笔者因多年从事数控技术工作,使用了多套日本安川、松下、三洋等数字伺服,但最近因国产伺服性价比好,使用了一些数控技术公司生产的交流伺服驱动及电动机,对使用中某些方面总结了一些简单实用的技巧。
1 KNDSD100基本性能1.1 基本功能SD100采用国际上先进的数字信号处理器(DSP)TM320(S240)、大规模可编程门阵列(FPGA)、日本三菱的新一代智能化功率模块(1PM),集成度高,体积小,具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。
与步进电动机相比,交流伺服电动机无失步现象。
伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。
调速比宽 1:5000,转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。
采用全数字控制,控制简单灵活。
用户通过参数修改可以对伺服的工作方式、运行特性作出适当的设置。
目前价格仅比步进电动机高2000~3000元。
1.2 参数调整SD100为用户提供了丰富的用户参数0~59个,报警参数1~32个,监视方式(电动机转速,位置偏差等)22个。
用户可以根据不同的现场情况调整参数,以达到最佳控制效果。
几种常用的参数的含义是:(1)“0”号为密码参数,出厂值315,用户改变型号必须将此密码改为385。
(2)“1”号为型号代码,对应同系列不同功率级别的驱动器和电动机。
(3)“4”号为控制方式选择,改变此参数可设置驱动器的控制方式。
其中,“0”为位置控制方式;“1”为速度控制方式;“2”为试运行控制方式;“3”为JOG控制方式;“4”为编码器调零方式;“5”为开环控制方式(用户测试电压及编码器);“6”为转矩控制方式。
数控机床进给伺服系统伺服参数优化研究【摘要】:伺服驱动系统是数控机床的重要组成部分,在相同的机械性能状况下,其伺服参数与机械性能的匹配程度决定机床的加工精度与质量。
很多机床设备往往偏重于机械方面的精度提升,而对电气方面伺服参数的优化重视不够。
本文结合实际生产中碰到的问题,以优化伺服进给轴的参数为目的,实现机床的最佳性能。
文中对伺服参数优化的对像、检测工具、永磁同步电机(PMSM)、SIEMENS840Dsl数控系统参数优化,模糊PID控制作了介绍。
首先依据数控机床的手动优化软件对研究对像做了大量的实验,找出相关的规律。
其次再引入模糊自适应PID控制方法,依据实验建立规则表,再用MATLAB仿真软件验证结论的正确性。
最后再把所得到的结论应用于实际伺服参数优化中,在不增加机床硬件的情况下,通过伺服进给系统的参数优化,可以明显提高机床的跟踪精度,最终实现加工质量的提升。
【关键词】:伺服参数优化CNCPMSMPID模糊自适应【学位授予单位】:山西大学【学位级别】:硕士【学位授予年份】:2013【分类号】:TG659【目录】:中文摘要10-11ABSTRACT11-13第一章引言13-191.1课题研究的目的与意义13-151.2伺服驱动技术国内外研究进展15-171.2.1国内研究进展15-161.2.2国外研究进展16-171.3课题来源及论文研究所完成的主要工作17-19第二章SIEMENS数控机床进给伺服驱动参数优化方案19-322.1目前的伺服参数优化方案19-222.2伺服驱动参数优化方法的改进222.3伺服优化的球杆仪检测平台22-282.4伺服优化的机床平台28-312.5小结31-32第三章永磁同步电机的数学模型32-463.1永磁同步电机简介32-333.2永磁同步电机的数学模型33-393.2.1基本方程33-373.2.2d、q轴的数学模型37-393.3永磁同步电机的矢量控制39-433.3.1状态方程及控制框图39-403.3.2解耦控制及坐标转换40-433.4永磁同步电机速度环数学方程43-453.4.1速度环框图43-443.4.2速度环数学方程44-453.5小结45-46第四章SIEMENS840DsI伺服系统三环回路控制参数特点及优化46-664.1SIEMENSS120伺服驱动系统简介46-514.2伺服优化基本概念51-554.2.1Bode图51-524.2.2阻尼、频率晌应与阶跃晌应524.2.3内含有耦合连接载荷的电机52-534.2.4滤波器53-554.3电流环优化55-574.4速度环优化57-624.4.1频率响应测试57-584.4.2K_P的调整584.4.3电流设定点滤波器58-594.4.4速度控制器积分时间T_n594.4.5设定点阶跃响应和干扰阶跃响应59-604.4.6参考模型60-614.4.7前馈控制61-624.5位置环优化62-634.6Trace功能63-644.7圆测试球杆仪64-654.8小结65-66第五章基于自适应模糊PI的伺服电机的参数优化66-915.1常规PID66-685.2数字PID68-705.2.1位置式PID控制算法68-695.2.2增量式PID控制算法69-705.2.3基于前馈补偿的PID控制算法705.3模糊PID70-745.3.1模糊-PID复合控制715.3.2比例-模糊-PI 控制715.3.3模糊自适应PID控制71-745.4模糊控制74-825.4.1结构74-765.4.2模糊化76-785.4.3模糊规则设计78-805.4.4模糊推理机805.4.5去模糊化80-825.5仿真分析82-905.5.1仿真模型82-845.5.2控制器设计84-855.5.3仿真结果分析85-905.6小结90-91第六章结论91-92参考文献92-96攻读学位期间取得的研究成果96-97致谢97-98个人简况及联系方式98-100 本论文购买请联系页眉网站。
FANUC数控系统伺服驱动优化在数控机床上的应用FANUC数控系统是世界领先的数控系统供应商之一,其伺服驱动器在数控机床上的应用具有广泛的优化空间。
数控机床作为现代制造业的重要设备,对于提高生产效率、降低人工成本具有重要意义。
优化FANUC数控系统的伺服驱动器可以有效提高机床的精度、速度和稳定性,从而提升整体加工质量和效率。
首先,FANUC数控系统采用的伺服驱动器技术先进,具有高精度、高可靠性和高稳定性的特点。
通过优化伺服驱动器的参数设置和控制策略,可以更好地适应各种加工工艺和零件加工要求,提高机床的动态响应能力和控制精度。
在高速、高精度加工场景下,采用FANUC伺服驱动器可以更好地满足对零件尺寸、表面质量的要求,提高加工精度和一致性。
其次,FANUC数控系统伺服驱动器具有优秀的即时响应能力和反馈控制性能,在加工过程中可以更快地调节参数和优化控制策略,实现更加高效的加工过程。
通过优化伺服驱动器的反馈控制算法和响应速度,可以降低机床加工过程中的振动和误差,提高加工精度和表面质量。
同时,FANUC数控系统的伺服驱动器还支持多轴同步运动控制,可以实现多道工序的同步加工,提高加工效率和生产能力。
另外,FANUC数控系统伺服驱动器具有开放式的通信接口和灵活的编程功能,可以更方便地与其他设备或系统进行集成和通信。
通过优化伺服驱动器的通信接口和数据传输速度,可以实现数控机床与工作站、MES系统、ERP系统等的无缝对接,实现信息共享和智能化制造。
此外,FANUC 数控系统伺服驱动器还支持远程监控和故障诊断功能,可以及时发现和解决机床运行中的问题,减少生产中断和损失。
综上所述,FANUC数控系统伺服驱动器在数控机床上的优化应用具有重要意义和广泛应用前景。
通过优化伺服驱动器的参数设置、控制策略、反馈控制算法和通信接口,可以提高机床的加工精度、速度和稳定性,实现智能化、高效化生产,推动制造业的发展和升级。
同时,FANUC数控系统伺服驱动器还可以与其他先进制造技术和工业互联网技术结合,实现更加智能、柔性、绿色的制造模式,推动制造业向高质量、高效率的方向发展。
数控系统伺服驱动优化方法
白斌
内容摘要:目前数控机床配置的数控系统主要有日本FANUC和德国SIEMENS系统,如何提高伺服驱动系统的动态特性,这也是维修及调试人员必须要做的一项很重要的工作。
机床各轴的驱动、电机数据如速度环、位置环增益直接影响轴的动态运行特性。
如果这些参数设置不当,就会导致机床运行过程中的振动,伺服电机啸叫,使加工无法进行,甚至会导致丝杆和导轨损坏。
为了达到良好的零件加工精度,对驱动参数进行优化是一项必不可少的工作。
关键词:速度环位置环优化
伺服驱动优化的目的就是让机电系统的匹配达到最佳,以获得最优的稳定性和动态性能。
在数控机床中,机电系统的不匹配通常会引起机床震动、加工零件表面过切、表面质量不良等问题。
尤其在磨具加工中,对伺服驱动的优化是必须的。
数控系统伺服驱动包括3个反馈回路,即位置回路、速度回路以及电流回路,其组成的框图如图1-1所示。
最内环回路反应速度最快,中间环节反应速度必须高于最外环,如果没有遵守此原则,将会造成震动或反应不良。
图1-1 伺服系统控制回路
伺服优化的一般原则是位置控制回路不能高于速度控制回路的反应,因此,若要增加位置回路增益,必须先增加速度回路的增益。
如果仅仅增加位置回路增益,机床很容易产生振动,造成速度指令及定位时间增加,而非减少。
在做伺服优化时必须知道机床的机械性能,因为系统优化是建立在机械装配性能之上的,即不仅要确保伺服驱动的反应,而且也必须确保机械系统具备高刚性。
以日本FANUC 0iC系统为例,详细讲解伺服驱动优化过程。
主要过程在伺服调整画面进行优化调整,画面如图1-2所示。
图1-2 FANUC伺服调整画面
1)首先将功能位参数P2003的位3 设定1,回路增益参数P1825设定为3000,,速度增益参数P2021从200增加,每加100后,用JOG移动坐标,看是否震动,或看伺服波形(TCMD)是否平滑。
注:速度增益=[负载惯量比(参数P2021)+256]/256 *100。
负载惯量比表示电机的惯量和负载的惯量比,直接和具体
的机床相关,一定要调整。
2)伺服波形显示:把参数P3112#0改为1(调整完后,一定要还原为0),关机再开机。
如下图1-3所示:采样时间设定5000,如果调整X轴,设定数据为51,检查实际速度。
图1-3伺服波形设置画面
如果在起动时,波形不光滑(如图1-4所示),则表示伺服增益不够,需要再提高。
如果在中间的直线上有波动,则可能由于高增益引起的震动,这可通过设定参数2066=-10(增加伺服电流环250um)来改变。
图1-4 伺服波形显示画面
3)N脉冲抑制:当在调整时,由于提高了速度增益,而引起了机床在停止时也出现了小范围的震荡(低频),从伺服调整画面的位置误差可看到,在没有给指令(停止时),误差在0左右变化。
使用单脉冲抑制功能可以将此震荡消除,按以下步骤调整:
a) 参数2003#4=1,如果震荡在0-1范围变化,设定此参数即可。
b) 参数2099设置为400
4) 有关250um加速反馈的说明:
电机与机床弹性连接,负载惯量比电机的惯量要大,在调整负载惯量比时候(大于512),会产生50-150HZ的振动,此时,不要减小
负载惯量比的值,可设定此参数进行改善。
此功能把加速度反馈增益乘以电机速度反馈信号的微分值,通过补偿转矩指令Tcmd,来达到抑制速度环的震荡。
5)速度回路和位置回路的高增益,可以改善伺服系统的响应和刚性。
因此可以减小机床的加工形状误差,提高定位速度。
由于这一效果,使得伺服调整简化。
HRV2控制可以改善整个系统的伺服性能。
伺服用HRV2调整后,可以用HRV3改善高速电流控制,因此可进行高精度的机械加工。
表1-1是标准HRV2高精度伺服设定控制设定参数。
表1-1 HRV2高精度伺服控制设定参数
SIEMENS810/840D系统具有自动优化功能,由驱动系统在负载状态下自动测试和分析调节器的频率特性,确保调节器的比例增益和积分时间常数。
如果自动优化的结果不够理想,达不到机床最佳控制效果,在此基础上需要进行手工优化。
首先就SIEMENS810/840D自动优化的具体步骤做一详细介绍。
在优化之前要使机床在JOG方式下,在如图1-5画面可以选Without PLC,这样在优化过程中PLC不生效。
Date:31.03.2011
File:06 S tart-up_axes.27 l rights reserved.SIT RAIN Auto mation
图1-5 840D自动优化画面
SIEMENS840D中PCU50轴优化具体步骤:
1.菜单→启动→驱动/伺服轴→扩展→自动控制设置
2.在自动控制设置窗口:设置好不带PLC,上限、下限。
3.按右侧垂直菜单的启动键,此时显示“开始机械系统测量部分1”
→确认
4.按“程序启动键”,电机正转。
然后显示“开始机械系统测量部分
2”→“确认”
5.再次按“程序启动键”,电机反转。
然后显示“启动当前控制的测
量”→“确认”
6.再次按“程序启动键”。
然后显示“控制器数据开始计算”→“确
认”
7.窗口显示:
8.按右侧垂直菜单的“保存”键,然后显示“开始测量速度控制回
路”→“确认”
9.再次按“程序启动键”。
手动适当修改驱动参数1407。
自动优化的结果并不一定是一个理想的结果,大部分情况下进行手工优化。
手工优化一般是先利用自动优化的结果,在原调节器比例增益和积分时间常数的基础上,更好地确定调节器比例增益和积分时间常数。
最后还要根据测量的结果设定各种滤波器控制数据,以消除驱动系统的共振点。
1.速度控制环手动优化
速度控制环优化比例增益和积分时间常数两个数据,先确定它的比例增益,再优化积分时间常数。
如果把速度调节器的积分时间常数MD1409调整到500ms,积分环节实际上处于无效状态,这时PI速度调节器转化为P调节器。
为了确定比例增益的初值,可从一个较小的值开始,逐渐增加比例增益,直到机床发生共振,可听到伺服电机发出的啸叫声,将这时的比例增益乘以0.5,作为首次测量的初值。
参考频率响应是Kp(MD1407)和Tn(MD1409)优化的最重要的方法。
优化后显示的幅值(db)和相位图1-6中,表示的是速度实际值是如何跟随设定值的;0db表示实际速度和设定速度值是相同的幅值;0相位表明实际速度跟随设定值具有最小的延时。
手动优化就是大量的、反复多次调整Kp(MD1407)和Tn (MD1409)数值,目的就是使频率特性的幅值在0db处保持尽可能宽的范围,而不出现不稳定的振荡情况,必要时也需要不断调整滤波器参数进行优化。
图1-6 参考频率响应图
2.位置控制环的优化
位置环优化主要是位置调节器的优化。
影响位置调节器的主要控制数据是它的伺服增益因子,因为系统的跟随误差与它有密切关系。
调整位置调节器伺服增益因子的前提条件是速度调节器有较高的比例增益,因此速度调节器的优化是位置调节器特性调整的基础。
调整伺服增益因子的目标,应使系统的跟随误差达到最小。
增加伺服增益因子可以减少系统的跟随误差,但是伺服增益因子不能调整得太大,否则会导致系统的超调,甚至出现振荡现象。
一般情况下,为了获得较高的轮廓加工精度,应尽可能增大伺服增益因子。
伺服增益因子在机床参数MD3220中设置。
优化位置调节器最简单的方法是观察它的跟随特性,当伺服增益系数改变时,在操作面板可以看到Following error(跟随误差)的变化,从中判断伺服增益因子是否达到最佳。
如图1-7所示。
图1-7轴服务画面
通过对FANUC和SIEMENS系统速度环、位置环的调试,发现对机床参数的调整是一件复杂而繁琐的工作,由于参数之间是相互影响的,需要反复的调试确定。
参数优化的好坏,决定加工效果。
如有侵权请联系告知删除,感谢你们的配合!。