平行度检测仪的设计方法
- 格式:pdf
- 大小:127.72 KB
- 文档页数:3
4米离轴反射式平行光管1.引言1.1 概述概述:4米离轴反射式平行光管是一种光学仪器,它通过将光线经过特殊设计的镜面反射系统传输,并实现光线平行传输的功能。
相较于传统的光学元件,这种光管具有更高的光学精度和传输效率。
在传统的光学系统中,由于光线经过多次反射和折射,会产生透射损耗和像差等问题。
而4米离轴反射式平行光管则通过特殊的光路设计,可以减少透射损耗和像差的产生,使得光线能够更加精确地传输。
该光管的工作原理基于离轴反射,通过将光线从一侧入射,经过多次反射后,从另一侧出射。
通过合理设计反射面的曲率和角度,可以实现光线的平行入射和平行出射。
这种设计不仅可以减少光线的损失,还可以提高系统的光学性能。
4米离轴反射式平行光管在许多领域都有广泛的应用。
例如,在光学实验中,它可以用于将平行光引导到要求高精度测量的光学器件上,从而提高测量的准确性。
在光通信领域,它可以用于传输光信号,提高传输距离和传输速率。
在激光加工中,它可以用于实现更精细的激光切割和焊接。
总之,4米离轴反射式平行光管是一种具有重要应用价值的光学仪器。
通过合理的设计和优化,可以实现高效的光线传输和精确的光学性能。
随着科学技术的不断发展,相信该技术在各个领域将有着更广泛的应用前景。
文章结构部分的内容可以按照以下方式编写:1.2 文章结构本文将按照以下结构进行阐述:第一部分是引言,主要包括概述、文章结构和目的。
在概述中,我们将简要介绍4米离轴反射式平行光管的基本原理和应用领域。
文章结构部分将介绍整篇文章的具体结构安排,以帮助读者了解文章的组织和编排方式。
最后,在目的部分我们将明确本文的目的,即通过对4米离轴反射式平行光管的原理和应用进行介绍,增进读者对该领域的理解和认识。
第二部分是正文,主要包括4米离轴反射式平行光管的原理和应用。
在原理部分,我们将详细讲解该光管的工作原理、结构特点和基本原理。
通过对其光路和光学特性的分析,读者可以对其工作原理有一个全面的了解。
三坐标做孔的平行度检测程序1.引言1.1 概述三坐标是一种用于测量物体尺寸、形状及位置关系的精密测量仪器。
在工业生产中,孔的平行度是一个重要的质量指标,它描述了孔与参考面之间的平行关系。
在制造过程中,孔的平行度检测对于确保产品的质量和性能至关重要。
本篇文章旨在介绍一个三坐标做孔的平行度检测程序。
该程序将利用三坐标技术,结合孔的平行度检测原理,实现对孔的平行度进行准确的测量。
文章将首先简要介绍三坐标技术的基本原理和应用领域。
通过了解三坐标技术的原理,读者可以更好地理解该程序的设计思路和实现方式。
随后,文章将详细探讨孔的平行度检测原理。
平行度检测是通过测量孔的倾斜角度和参考面之间的平行关系来评估孔的质量。
我们将介绍如何通过三坐标技术来实现对孔的平行度的精确测量,并解释其背后的计算原理。
接着,文章将重点讨论检测程序的设计与实现。
我们将详细描述如何编写一个高效、准确的三坐标做孔的平行度检测程序,包括数据采集、计算和结果显示等方面。
通过对程序设计的深入分析,读者可以了解到如何根据实际需求进行自定义设置,以实现更加灵活和高效的孔的平行度检测。
最后,文章将探讨该检测程序的应用与意义。
我们将详细说明该程序在工业生产中的应用场景,以及其对提高产品质量、提升工作效率和降低成本的重要意义。
读者可以从中获得对该程序价值的深入认识,并了解其在实际工作中的具体优势和应用效果。
通过本篇文章的阅读,读者将能够全面了解三坐标做孔的平行度检测程序的设计与实现过程,以及其在工业生产中的应用价值。
希望本文能够对相关领域的研究人员和工程师有所启发,为他们在实际工作中提供一定的参考和指导。
1.2 文章结构文章结构部分的内容可以包括以下内容:本文分为引言、正文和结论三个部分。
每个部分的主要内容如下:1. 引言部分包括三个小节。
在引言的概述部分,将简要介绍三坐标做孔的平行度检测程序的背景和重要性,引起读者对该主题的兴趣。
在文章结构的介绍部分,说明全文的组织结构和各个部分的内容概括,读者可以通过阅读本部分来了解文章的整体框架。
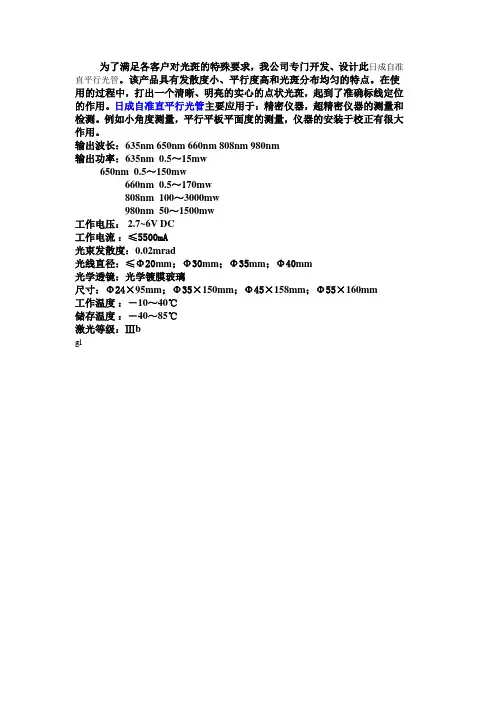
为了满足各客户对光斑的特殊要求,我公司专门开发、设计此日成自准直平行光管。
该产品具有发散度小、平行度高和光斑分布均匀的特点。
在使用的过程中,打出一个清晰、明亮的实心的点状光斑,起到了准确标线定位的作用。
日成自准直平行光管主要应用于:精密仪器,超精密仪器的测量和检测。
例如小角度测量,平行平板平面度的测量,仪器的安装于校正有很大作用。
输出波长:635nm 650nm 660nm 808nm 980nm
输出功率:635nm 0.5~15mw
650nm 0.5~150mw
660nm 0.5~170mw
808nm 100~3000mw
980nm 50~1500mw
工作电压: 2.7~6V DC
工作电流:≤5500mA
光束发散度:0.02mrad
光线直径:≤Φ20mm;Φ30mm;Φ35mm;Φ40mm
光学透镜:光学镀膜玻璃
尺寸:Φ24×95mm;Φ35×150mm;Φ45×158mm;Φ55×160mm 工作温度:-10~40℃
储存温度:-40~85℃
激光等级:Ⅲb
gl。
测控仪器的概念测控仪器则是利用测量和控制的理论,采用机、电、光各种计量测试原理及控制系统与计算机相结合的一种范围广泛的测量仪器。
按功能将仪器分成以下几个组成部分:1 基准部件2 传感器与感受转换部件 3 放大部件 4 瞄准部件 5 信息处理与运算装置 6 显示部件7 驱动控制器部件8 机械结构部件测控仪器的设计要求(1)精度要求(2)检测效率要求3)可靠性要求(4)经济性要求(5)使用条件要求(6)造型要求微分法几何法能画出机构某一瞬时作用原理图,按比例放大地画出源误差与局部误差之间的关系,依据其中的几何关系写出局部误差表达式。
优点是简单、直观,适合于求解机构中未能列入作用方程的源误差所引起的局部误差,但在应用于分析复杂机构运行误差时较为困难。
作用线与瞬时臂法基于机构传递位移的机理来研究源误差在机构传递位移的过程中如何传递到输出。
数学逼近法原理误差仪器设计中采用了近似的理论、近似的数学模型、近似的机构和近似的测量控制电路所引起的误差。
它只与仪器的设计有关,而与制造和使用无关。
原始误差由机床、夹具、刀具和工件组成的机械加工工艺系统会有各种各样的误差产生,这些误差在各种不同的具体工作条件下都会以各种不同的方式(或扩大、或缩小)反映为工件的加工误差。
误差的分类及表示方法按误差的数学性质分1)随机误差2)系统误差3)粗大误差按被测参数的时间特性分1)静态参数误差2)动态参数误差按误差间的关系分1)独立误差2)非独立误差误差的来源与性质原理误差仪器设计中采用了近似的理论、近似的数学模型、近似的机构和近似的测量控制电路所引起的误差。
它只与仪器的设计有关,而与制造和使用无关。
制造误差,运行误差:仪器在使用过程中所产生的误差。
(一)力变形误差(二)测量力(三)应力变形(四)磨损(五)间隙与空程(六)温度(七)振动与干扰(八)干扰与环境波动引起的误差3.2. 归纳测控仪器的设计流程测控仪器总体设计,是指在进行仪器具体设计以前,从仪器自身的功能、技术指标、检测与控制系统框架及仪器应用的环境和条件等总体角度出发,对仪器设计中的全局问题进行全面的设想和规划。
位置误差的测量实验报告一、实验目的1. 熟悉零件有关位置误差的含义和基准的体现方法。
2. 掌握有关通用量仪的使用方法。
二、实验用量具齿轮跳动检查仪、平板、千分表、百分表、千分表架、V型块、直角尺、钢板尺等三、实验内容及说明1、平行度误差的测。
连杆小孔轴线对大孔轴线的平行度1)连杆孔的平行度要求如图1-15所示2)测量方法如图1-16所示平行度误差为将零件转位使之处于图中0度位置,使两心轴中心与平板等高,然后在测出0度位置的平行度误差。
根据测量结果判断零件平行度误差是否合格2. 垂直度误差的测量十字头孔轴线对孔轴线以及对侧面B的垂直度要求,如图1-17所示。
1)轴线对轴线的垂直度误差的测量如图1-18所示。
将测量表架安装在基准孔心轴上部,在距离为L2两端用千分表测得读数分别为M1,M2,则该零件轴线对轴线的垂直度误差为:2) 轴线对侧面B的垂直度误差测量如图1-19所示。
被测孔轴线用心轴模拟,先将心轴穿入零件被测孔,以零件顶面为支撑面,放在三个千斤顶上。
再用一直角尺,使其一面放在平板上,另一面与基准面B靠拢,同时调节千斤顶使其与基准面贴合为止,这说明基准面B与平板垂直。
然后用千分表分别测出图中L2长度两端读数M1,M2,则垂直度误差为根据以上结果,判断两项垂直度要求是否合格3. 圆跳动误差的测量被测零件圆跳动公差要求如图1-23所示,其测量方法如图1-24所示1)径向圆跳动误差的测量:将工件旋转一周,记下千分表读数的最大差值。
共测三个截面,取其中最大跳动量作为该表面的径向圆跳动误差值,并判断该指标是否合格2)端面圆跳动误差的测量:分别在端面靠近最大直径处和较小直径处测量,每测一处,转动工件一转,读取指示表的最大最小读数差,取其较大者作为该端面的圆跳动误差值图1-15图1-16图1-17图1-18中国石油大学(华东)四、数据分析1. 单位(mm)实验内容L1L21L22L2M1M2F允许值是否合格孔轴线平行度0度位置36.262.059.0157.2 1.191 1.1950.000920.25合格孔轴线平行度90度位置36.279.578.5194.2 1.981 2.4650.09020.1合格孔轴线与端面垂直度93.860.060.0213.80.7100.5260.08070.06不合格孔轴线与孔轴线垂直度93.878.077.8249.60.8390.8890.01880.06合格图1-19图1-23图1-242. 单位(µm )3. 单位(µm )五、思考题1. 求垂直度、平行度误差时为什么要有L1/L2,L1、L2分别指什么?L2指被测心轴长度;L1指被测工件孔的长度。
检具和测量支架技术要求1. 概述检具:检具是一种用来测量和评价零件尺寸质量的专用检验设备。
在零件生产现场, 通过检具实现对零件的在线检测,为此需要将零件准确地安装于检具上, 然后通过目测,或测量表,或卡尺对零件型面,周边进行检查,也可以借助检验销或目测对零件上不同性质的孔及零件与零件之间的联接位置进行目检,从而保证在试生产及起步生产时实现零件质量状态的快速判断。
在此情况下,通过目检或测量可以判断:零件轮廓周边大小和形状区域以及相对位置与通过CAD/CAM直接加工的检具理论值之间的偏差。
对于零件上的某些极其重要的功能性尺寸,还能利用检具进行数值检测。
通常不能借助检具直接获得零件基于车身坐标系统精确的坐标值, 而是将零件置于检具上通过三坐标测量机测量方才获得.现代检具的结构在设计时同时考虑其可以作为测量支架使用.但是当检具的在线检查功能与测量支架功能不能同时满足时,应首先满足检具的在线检查功能。
测量支架是用三坐标测量机测量零件时的一种辅助支架,其所有的支撑面(点),定位基准面(点)均必须根据零件的CAD数据铣削加工,有些特殊零件的测量支架还应具有部分检具的功能。
1。
1 检具和测量支架的设计、制造和验收应以产品图纸和主模型(或CAD 数据)为基准。
当零件无主模型(或CAD数据)时,应以产品图纸和经认可的样件作为依据。
1。
2 检具和测量支架能够根据有效的产品图纸和主模型(或CAD数据)来合理地测量零件的所有参数,借助于三坐标测量机能对检具和测量支架进行校验和鉴定。
1.3 在正常的使用频率和良好的保养维护情况下,应保证检具和测量支架与其相对应的压延模具或焊接夹具有相同的使用寿命。
1.4 检具和测量支架的设计原则按VW 39D701,技术要求按VW 39D702。
2。
结构2.1 材料选择:(按VW 39D721)2.1。
1 轮廓(外形)表面:大、中冲件:由可加工的树脂材料组成(如CIBA 5166/XB5166)小冲件:铝合金2.1。
目录摘要 (1)关键词 (1)1 前言 (3)2 设计方案的确定 (3)2.1 连杆端面平行度自动检测仪设计的背景和意义 (3)2.2 平行度的原理 (5)2.3 连杆端面平行度自动检测仪的设计思路 (5)3 连杆端面平行度自动检测仪的设计 (6)3.1 自动检测装置工作台的组成部分的设计 (6)3.1.1 定位元件的设计 (6)3.1.2 检测元件的设计 (6)3.1.3 调整机构的设计 (6)3.1.4 标准连杆件的设计 (6)3.2 传感器的布局及检测方法 (7)3.2.1 传感器的布局 (7)3.2.2 检测方案和数据采集 (7)3.2.3 检测方法 (7)4 形位误差检测的特点和原则 (7)4.1 形位误差检测的特点 (7)4.2 形位误差检测的基本原则 (8)5 原始数据的采集和处理 (9)5.1 传感器采集数据的原理 (9)5.2 原始数据的处理 (9)6 自动检测装置的系统设计 (10)6.1 主机部分 (10)6.2 传感器测量部分 (10)6.3 电机及驱动部分 (11)6.3.1 步进电机的选择 (11)6.3.2 测量系统的运动控制 (12)6.4 机械机构部分 (12)6.4.1 工作台的设计 (13)6.4.2 滚珠丝杠螺母副的设计 (13)6.4.3 滚珠副导轨的设计 (15)6.4.4 位置检测元件的设计 (15)6.4.5 联轴器的选择 (15)7 自动检测装置的软件设计 (16)7.1 数据处理程序的编制 (16)7.2 数据自动采集接口 (17)8 测量误差的组成及补偿思路 (17)9 结论 (18)参考文献 (18)致谢......................................................................................... 错误!未定义书签。
附录 (24)连杆端面平行度自动检测仪的设计摘要:平行度是确定零件精度的一个重要标准,而机械产品是由一些零、部件组成的,因此零、部件的几何精度将直接影响整个机械产品的精度和使用效果。
平板类零件平面度平行度的测量王玉霞冯栓良李全胜段成华:平板类零件平面度平行度的测量25平板类零件平面度平行度的测量MeasuringParallelismandFlatnessofFlatparts王玉霞冯栓良李全胜段成华(1石家庄金刚集团2石家庄学院)[摘要]本文以阀板为例介绍了一种平板类零件平面度平行度的测量方法,着重介绍了其测量原理以及相适应的机械测量装置.本测量系统可一次装夹同时测量出平板类零件的两个平面度参数和两平面互为基准的平行度参数,具有被测参数测量值显示,超差警示,测量结果显示等功能.(关键词]板类零件平面度平行度测量1前言平板类零件在机械零件中占有很大的比重,平板双面的平面度和平行度往往是重要的技术指标.常规的检测采用在标准平面上用三可调支承架及百分表测量,或送往计量部门采用常规计量仪(如三坐标量仪)检测,成本高效率又太低,对于批量生产难以实现丁序质量控制,严重影响板类零件的正常加工生产.下面我们以汽车空气压缩机阀板平面度平行度的测量为例,说明测量原理与整个系统设计.阀板的平面度和平行度加工误差直接影响到汽车空气压缩机系统气密性,是保证汽车安全行驶的一项重要技术指标.2检测原理与系统设计平板类零件平面度和平行度参数检测是将被测零件外形尺寸的微小变化通过电感式位移传感器将位移信号转换成电信号,这种信号经放大和模数转换后由计算机处理测量数据和对平面度,平行度进行评定.最后由CRT显示器显示测量结果.工作原理图如图1所示.尺传放模数计【寸感大I转换算j司变器l—器r+{器—+机卜+化圈1最关键的是确定一种适宜生产过程的平面度和平行度测量与误差评定的方法以及研制高效率, 高精度和高可靠性的专用测量与数据采集系统.1.调整被测量表面使评定基准与测量基准平行.此时量值的最大值与最小值的代数差即为平面度误差,但把评定基准调整到符合最小条件是困难的,因为理想平面到实际表面的最大距离为最小即符合最小条件,但实际表面的形状是各种各样的,理想平面的实际位置将随着具体被测表面的不同而改变.所以只能选择便于在实际表面上确定其位置的其他评定基准,然后进行测量. 2.被测表面上选择一些有代表性的截面按测量直线度误差的方法进行.对任何一个被测表面. 我们都可以看成是由无数条素线组成,所以每一截面的直线度误差皆能在一定程度上反映被测表面的平面度误差,如果能把若干个截面上各自独立的直线度误差有意识地联系起来,经过科学地数据处理,综合到相对的同一评定基准平面上去就可以得到被测平面的平面度误差值.本系统采用的正是这种测量方式.对于平面度误差的评定,通常采用有i种方式:最小区域法,对角线法和三点法.这三种方法中的后两种评定误差较大,易将合格件判为超差件.按最小区域法来评定平面度误差.基准面的位置要符合最小条件,或者说包容被测表面的平行平面之间的距离为最小,评定误差为最小..我们采用最小区域法来评定平面度误差.当测量得到的原始数据经过数据处理后,可得到一组相对基准表面的新数据,这组新数据的基准内燃机与配件2010年第6期是否满足最小条件的要求,还需要按一定的准则进行判别即三角形准则,交叉准则和直线准则.对于平面度误差法的求解方法,在计算机比较普及的今天,随着平面度误差值的评定方法的不断更新,出现了一些比较有价值的评定方法.但是,由于求解平面度误差值方法的限制,需要有经验的操作者进行找点试算,如所找的点不准确,计算出的结果就不准.这就要经过反复的试算,直至得到准确的结果为止,数据处理时间太长.最小区域法的判别准则是实现包容被测表面的两平行平面间的距离为最小是判别准则.在一般的情况下,所测得的原始数据矩阵图很少能巧合地满足判别准则,这就要使基面旋转来得到新的矩阵图,使之出现符合准则情况的特征点.基面旋转是评定平面度误差的关键一环.圈—2圜一3圜4注:上图▲为最低点.△为最高点为了测量阀板两端面平面度和平行度,阀板平面度平行度测量机都采取上,下两面布测点,每面布实测点l0点,理论计算点为16点,这样每个阀板实测为总共20点,理论计算为32点.布测点示意图如图5所示,图中"▲"为实际测量点,"×"为补加的理论计算点.厂一一一1▲广一一一卜一十一斗一十rI—一寸一_千t-————▲——J幽5圈6本系统按l6点理论矩阵布点测量,但根据零件实际形状的特殊性(结构中的孑L,凹槽等),实际测量布了10点,但仍按l6点矩阵计算评定平面度误差.被检测的两种型号阀板零件的外形简图如图5所示.3机械测量装置设计该测量系统设计时,从方法上人手,简化机构,减少加工难度,降低加T精度.测量前用校准件使上测量台的l0个传感器的数值处于一个平面内, 下测台的l0个传感器的数值处于与上测量台的10 个传感器的数值平行的一个平面内.利用计算机会很容易实现这一点(只有初开机时才进行校准工作).然后开始测量零件.其测量示意图如图7所示:基准平面_刘F平自—÷I_:::f:;:要测量基准平面图7两条点划线分别为上测量台基准平面和下测量基准平面,这两个基准平面是由校准件确定的.两条曲线为被测零件的上下两平面.△X为被测零件的上平面各点相对于上测量台基准平面的变化量.△Y为被测零件的下平面各点相对于下测量台基准平面的变化量.通过测量,被测零件的上下两平面分别得到一个数据矩阵,利用最小区域法可以分别得到它们的平面度误差.利用最小二乘方法可以分别得到它们互为基准的平行度误差.由于要测量阀板的两端面的平面度和互为基准的平行度,所以在阀板两面共布置了20个测点.机械装置简图如图8所示.1,本体;2,运动传递机构:3,下测量台;4,被测工件;5,上测量台;6,托莱;7, 导向及限位;8,浮支承销;9,测头;1O,定位销;11,支承销图8机械部分是由本体,运动传递机构,下测量台,托架,上测量台等组成.1)本体(件1):它是整机的底座,内部装有运动传递机构各零部件,其顶面是设计的基准.也是加工与装配的基准.一切其它机构都以此基准延伸.它的底部装有四个可调支脚,可在一定范围内调整整机的水平和高低.2)运动传递机构(件2):它是将手轮的转动运王玉霞冯栓良李全胜段成华:平板类零件平面度平行度的测量27动通过锥齿轮副(直角),丝杠,螺母等部件,传递给托架,以实现托架的上升或下降.为了使操作轻松自如,本套传递系统都设计成省力机构.运动传递机构具有自锁功能,可使托架停留在运动区间内的任何位置.3)下测量台(件3):它固定安装在本体上,其上按一定规律装有十只传感器及测头等零件.测量时,被测零件放在下测量台上,以下测量台上的两个定位销周向定位(限制水平移动的三个自由度), 三个支承销作支承定位(限制垂直方向的自由度).4)被测零件(件4):被测零件可以是EQ140一阀板3509D5--03l,也可以是EQ153(含EQ145)阀板3509N--061.还可以是校准件.5)上测量台(件5):它固定安装在托架上,其上按一定规律装有十只传感器及测头和三个浮支承销.测量时,下测量台装被测零件,上测量台随托架下降,并利用三个浮动支承销压紧零件,使零件定位并夹紧,然后进行测量.6)托架(件6):用以安装上测量台,其上设计有两个限位支承面,工作时,托架可以上升和下降. 7)导向以及限位装置(件7):其作用是使托架能较高精度地垂直上,下运动,并能精确限位.托架每次下降到测量位置,都应使测量台保持同一位置.所以托架上的两个限位支承面与本体上的两个限位支承面应密切贴合.这也是调整时的重点之O8)浮支承销(件8):该销的头部可以受力而自动伸缩,共有三个浮支承销,安装在测量台上.其作用是将零件定位日并压紧.9)测头(件9):共有20个测头,上,下测量台各安装了10个测头.其作用是拾取零件被测表面测点的数据.101定位销(件10):共有两个定位销,安装在下测量台上.其作用是限制被测件的水平方向的自由度.111支承销(件l1):共有三个支承销,安装在下测量台上.其作用是限制被测件的垂直方向的自由度.4电气系统电气系统以工控技术为核心,采用工控,高速数据采集技术及线性集成电源,电感式位移传感器,专用精密放大电路等集成电路,故结构简单,精度高,稳定性好.系统硬件结构框图如下图9所示. 图9系统软件采用模块化结构,用C语言编制,运行于DOS6.22环境.程序流程图如图l0所示.④圈105数据测试结论1.试验数据(1),测量机的准确度的测试取十块阀板零件,送到计量部门进行测试,然后.将此十块阀板在该测量机上进行测试,测试数据与偏差如表1所示.(2),测量机的重复精度测试取一块阀板零件,在该测量机上连续测量20次.测量数据与测量重复精度评价的均方根估算值如表2所示.2.分析与说明(1),测量机的准确测试时,计量部门测量的结果与该测量机测量的结果有偏差,最大偏差为4.2微米.引起偏差的主要原因是:测点数和测点位置不同.中心计量所每个被测面取60点,该测量机每个被测面只取l6点.所以产生偏差,但是,偏差不大.属于测量机允许误差范围内.(2),测量机的重复精度测试时,对某一阀板进行连续20次测量,存在偏差,四项测量数据的均方差分别为:0.2372,0.1322,0.5649,0.4882.即:Smax= 0.5649.N=20.则K6:1.0132,8=KS*Smax=0.5724,38= 内燃机与配件2010年第6期1.717微米.其产生的主要原因是:一是电气系统的漂移,二是重复装夹的微量偏移.但是,偏差不大,属于测量机允许误差范围内.3.结论根据测试数据可知,准确度误差最大为4.2微米,重复精度误差最大为2.1微米.重复精度评价的3Q=1.717微米,小于要求的3.5微米.阀板的平面度公差为20微米.平行度公差为50微米.测量机的测量精度系数在1/3—1/l0之间,满足工艺要求. 表1(单位:微米)件测试项目计量部门测测量机的测偏差A号量数据量数据A平面度4.75.1+O.4B平面度l6.516.1-0.41A平行度8_410.O+1.6B平行度l9.119.8+O.7A平面度lO39.1一1.2B平面度8.67.8—1-22A平行度lO.710.5-0-2B平行度8.510.5+2.OA平面度27.231.4+4-2B平面度41.141.8+O.73A平行度33_437.2+3.8B平行度45.045.6+O.6A平面度11.1lO.O一1.1B平面度15_214.0一1.24A平行度l1_8l4.9+3.1B平行度l6.6l5.7一O.9A平面度l3.6l3.7+O.1B平面度26.524.3-2-25A平行度l9.5183一1.2B平行度30.426.2-4.2A平面度17-318.4+1.1B平面度l1.7l】.70.06A平行度25-325.9+0.6B平行度19-319.7+0I4A平面度5.083+3.3B平面度5.95.0-0.97A平行度8.2l2.4+4.2B平行度l0.1l0.3+0.2时间:2009.10.15上午操作人:李全胜记录人:冯栓良验证人:王玉霞件测试项目计量部门测测量机的测偏差A号量数据量数据A平面度l5.313-2—2.1B平面度10I39.2一1.I8A平行度14.815.7-0.9B平行度l2.914.0+1.1A平面度20.822.6+1.8B平面度27.225.7一1.59A平行度21.422.7+l_3B平行度28.425.8-2.6A平面度26.830.2+3.4B平面度35.536.6+o.81OA平行度35.636.3+O.7B平行度46.546.3-0.2表2(单位:微米)次数A面平面度B面平面度A面平行度B面平行度16.7l6.710.2l9.126.6l6.79.7l8.936.6l6.49.6l8.546.4l6.49-3l8.456.5j63l0.1l8.766.816-410-3l9.076.716.6l0-318.9863i6.410.7l9396.3l6-4l0.719.61O6.】16-410.219.4116.2l6.5l0.2l9.4l26.2l6-410.619.6l36.4l6.4l1-219.8l46.4l6.411.219.9l563l6.1l1.119.4l66016-4l1.Ol9.9I75.916-310.419.5l86.1l6.4l1.420.1I96.1l6.410.619.6206.2l6.41O.919.9均方0.2372O.1322O.565O0.4882时间:2009.10.16.上9点操作人:李全胜记录人:冯栓良验证人:王玉霞(下转第35页)朱则刚:丁程机械发动机冷却系统的维护和检修散热器时并不感觉烫手;风扇皮带不打滑,风扇叶转动正常.表明冷却系统大循环不通或受阻.可初步诊断节温器损坏.其主阀门不能开启,副阀门不能关闭所致.拆除节温器后,发动机工作恢复正常, 更换新件后故障消失.节温器的常见故障有:阀门开启和全开的温度过高,甚至不能开启,节温器关闭不严,前者将造成冷却水不能有效地进行大循环,致使发动机过热, 在寒冷地区,还会因冷却未经大循环而使散热器结冰.后者将造成发动机升温缓慢,造成发动机过冷. 此外,随着节温器性能逐渐衰退,主阀门的开度逐渐减小,致使进入大循环的冷却水流量减少,冷却系统将逐渐过热.节温器失灵时.有两种情况:节温器主阀门长期处于关闭状态,无论水温高低,冷却水的循环路线均是由水泵泵水,经缸体水套缸盖水套,出水管后,又由水泵泵向缸体,即所谓的小循环,这样必然造成发动机温度过高直至开锅.如果节温器长期处于打开状态,因无节温器的控制,冷却水循环路线则一直是由水泵经缸体和缸盖水套,出水管到散热器,这样,在车辆启动时(尤其在冬季),发动机冷却水温上升慢,使发动机不能在正常的温度下工作.发动机温度过低.发动机开始工作时,打开水箱加水口盖观察,若冷却水平静为节温器工作正常:如果水温升得较快,当表温度针显示8O℃后,即达到主阀门开启温度,升温速度减慢,也为节温器工作正常;否则工作失效应予更换新件.当水温在70℃以下,而水温表继续上升.达到节温器主阀门开启时,水箱内水温缓慢上升为节温器性能良好.否则阀门关闭不严,使其过早地进行大循环T作失常.当节温器主阀门达到打开时刻,用手指触摸水温烫手,再打开放水开关,感觉水温一样烫手为节温器良好,否则主阀门打不开而损坏.节温器的检查是将其吊放在盛水的烧杯中,逐渐提高水的温度,观察节温器开始开启和完全开启的温度.如蜡式节温器初开温度为76℃左右,完全开启温度为85℃左右;主阀门最大升程(全开时)为7ram.若经检验不符合上述要求时,一般予以更换新件. (上接第28页)测量精度系数K=36/T=2.1/20=0.105;测量能力指数Mcp=T/6~=20/4.2=4.766社会效益和经济效益对于平板类零件来说该测量机具有较好的推广价值.过去,由于该汽配厂一直没有专用的检测设备,只能靠人T用百分表抽检或送上级部门用i坐标测量机测量阀板的平面度与平行度.人工检测存在效率低,精度差,劳动强度大,不能真实描述平面度和平行度误差等诸多缺陷,而三坐标测量机测量费用高且时间长,都无法满足现场工艺测量技术要求.阀板平面度平行度测量机的应用解决了现生产检测难题.实现了对阀板平面度平行度百分之百检测.采用人T抽检的抽检率仅为10%左右,若按日产600件,根据其测量不确定度与零件公差以及工艺能力系数.计算得其误收率达4%,即每日约24件不合格零件进入下道工序并装车使用,造成质量隐患.而采用该测量机后,有效地控制了零件加工工序质量,提高了检测效率,降低了工人的劳动强度.同三坐标测量机相比,效率提高40倍以上并且大大降低了成本.参考文献1中国标准出版社第三编辑室,六项基础互换性标准汇编中国标;住出版社,20052(美)贝克维思(Beckwith,T.G.)等着,王伯雄译,《机械量测量》.水利电力出版社,2004年07月。
Internal Combustion Engine &Parts———————————————————————基金项目:2014年福建省中青年教师教育科研项目(A 类)—发动机连杆平行度和中心距的综合检具研究,JA14419,项目负责人:陈小梅。
作者简介:陈小梅,讲师,硕士研究生,主要研究方向为机械结构设计。
0引言随着人们生活水平的不断提高,再加上汽车行业的蓬勃发展,人们对汽车安全性提出了更高的要求,而连杆作为汽车发动机的重要零件之一,其质量关系着整车的安全性。
连杆在机体中所做的运动较为复杂,它是活塞和曲轴的连接件,一方面将活塞顶面的气体压力传递给曲轴,同时又受曲轴的驱动带动活塞运动,从而压缩气缸内的气体。
连杆的这些工作特性决定了连杆的材料、设计、加工工艺等有更高的要求。
而在保证了合理的加工工艺后,连杆加工精度的测量成了生产中频繁而又不可缺少的环节。
目前,连杆加工质量的测量重要有以下几种方法:在20世纪80年代前后,连杆检测主要是采用手动测量,该方法人为因素影响大,并且效率低,之后,连杆检测出现了采用微机控制的多参数综合量仪,而且随着时间的推移,这类检测装置成为趋向;还有三坐标测量机测量和用不同传感器制造的综合量仪及水柱式气动量仪测量等,理论上这是一种先进的测量设备,但由于实际使用时对环境条件要求较高,检测周期较长[1],无法满足生产线上快速检测平行度和中心距的要求,不便于生产,因此该测量方法在批量化生产的连杆检测上都并不实用,许多连杆生产厂家都争先研制适合的连杆检测装置。
另一方面,在国家“十三五”规划和“中国制造2025”战略的引领下,制造业将进入智能制造的时代,目前欧美的机器人市场已基本饱和,而我国机器人及智能装备产业正处于优化和提升阶段。
工信部在十三五规划指出,到2025年,制造业重点领域全面实现智能化。
智能制造新模式以智能工厂/车间为载体,以网络互联为支撑,通过智能制造装备等手段,达到有效缩短产品研制周期、提高生产效率、提升产品质量的目的。
平行度检具的设计方法
平行度检具?嘿,那可是个超厉害的工具!设计平行度检具,首先得明确测量对象和精度要求。
这就好比你要去参加一场比赛,总得知道比赛规则和目标吧?要是稀里糊涂地开始,那可不行!
测量基准的选择至关重要。
就像盖房子得有个坚实的地基,选对了基准,后面的测量才能靠谱。
你想想,要是基准都歪了,那还能测出准确的平行度吗?
结构设计要合理。
不能太复杂,也不能太简单。
太复杂了操作起来麻烦,容易出错;太简单了又可能精度不够。
这就像做饭,调料放多了太咸,放少了没味道。
在设计过程中,安全性可不能忽视。
要是检具不稳定,突然倒了或者出啥意外,那可不得了!就像走钢丝的时候没有安全绳,你敢走吗?稳定性也很重要,要是测量的时候数据一直在跳,那咋能行?就像坐过山车一样,忽上忽下的,能让人放心吗?
平行度检具的应用场景那可多了去了。
比如机械加工、汽车制造、航空航天等等。
在这些领域,平行度的要求可高了!它的优势也很明显啊,精度高、操作方便、效率高。
你说,这么好的工具,谁不喜欢呢?
给你举个实际案例吧。
有一次,在一个汽车制造厂里,工人们用平行度检具检测发动机缸体的平行度。
哇塞,一下子就测出了问题所在,及时进行了调整,避免了大麻烦。
要是没有这个检具,那可就惨了,说不定会生产出一堆废品呢!
平行度检具就是这么牛!它能让你的测量工作变得轻松又准确。
所以啊,设计平行度检具的时候一定要认真,可不能马虎哦!。
我对机械设计平行度、垂直度公差等级的理解在机械设计和制造中,平行度和垂直度是非常重要的概念,它们影响着零件的装配质量、工作稳定性和性能可靠性。
平行度和垂直度公差的等级则是衡量零件制造精度和质量水平的重要标准。
本文将从浅入深地探讨这两个概念,帮助读者更好地理解它们的意义和应用。
一、平行度和垂直度的定义和意义1. 平行度平行度是指在特定平面内,两个平行面或轴线之间的偏离程度。
在机械设计中,平行度的要求通常体现在零件的装配和相对位置上。
机床上的导轨、轴承支座等部件需要保持一定的平行度,以确保工作台的运动平稳、精度高。
另外,一些特殊要求的轴承也需要保持一定的平行度,以保证其工作性能。
2. 垂直度垂直度是指在特定平面内,两个垂直面或轴线之间的偏离程度。
在实际工程中,垂直度的要求通常在装配工艺、结构牢固性和工作稳定性方面发挥重要作用。
在建筑结构中,墙体的垂直度对整体结构的稳定性和外观效果有着关键性的影响。
二、平行度和垂直度的公差等级及其应用在实际的机械制造中,平行度和垂直度的公差等级决定了零件制造的精度范围和质量水平。
根据国际标准ISO 1101,平行度和垂直度的公差等级通常分为三个等级,即一般等级、精密等级和特殊等级。
1. 一般等级一般等级是指在一般机械加工和装配中使用的公差等级。
它适用于对平行度和垂直度要求不是特别高的零件,可以满足大多数机械装配和工作要求。
2. 精密等级精密等级是指在精密机械加工和装配中使用的公差等级。
它适用于对平行度和垂直度要求比较高、装配精度和运行平稳性要求较高的零件,如精密仪器、车床、数控机床等部件。
3. 特殊等级特殊等级是指在特殊机械加工和装配中使用的公差等级。
它适用于对平行度和垂直度要求非常严格、装配精度和运行平稳性要求极高的零件,如航空航天、国防军工等高端领域的零部件。
三、个人观点和总结在我看来,平行度和垂直度的公差等级不仅仅是零件制造精度的标准,更是对机械设计和制造质量的一种保障。
难点难点通过几何关系的分析,找到平行度误差产生的因素,找正的方法教学方法教法任务驱动法学法小组互助、小组竞争和自主探究学习法环节教学内容教师活动学生活动导入课题(约5分钟)1、自主测量中级工操作试题中工件总长?2、发现同一工件不同方向的测量结果不同。
3、引出问题——平行度通过自主测量中级工操作试题中工件总长宣布本次课的任务,根据测量结果引出本堂课内容。
本环节实行五人一组的小组学习模式。
教师布置任务后,同学们开始测量和产生疑问。
提出问题——平行度。
设计思路直入式布置任务,让学生尝试动手做,由学生自己发现问题,进而探索解决问题的方法,带着疑问学习,激发学生求知欲。
回顾复习(约3分钟)根据工件图纸上的具体形位公差——平行度的相关内容。
平行度识读:1、定义:零件的左端面相对于基准A右端面的平行度公差值为0.04。
2、含义:教师根据工件图纸上的具体形位公差——平行度的相关内容,引导学生回顾复习,掌握知识。
结合图纸思考和回顾所学的平行度的相关概念。
设计思路本环节遵循“做中学”的教学理念,根据本节课的教学目标,结合图纸思考和回顾所学的平行度的相关概念,为下几何分析奠定基础。
环节教学内容教师活动学生活动几何分析(约15分钟)做一做:根据图纸的工艺流程来分析主轴,工件相关要素的几何关系,从而来找到平行度的找正方法。
一、原因探究1、装夹毛坯时几何关系:2、车削工件右端时的几何关系:3、掉头车削工件左端时的几何关系:二、找正分析教师强调工艺流程中的几何关系的变化情况,探究原因,并在讨论过程中,找到原因,评价学生的思维的情况,鼓励小组互助与竞争,并及时提示和指导的学生。
引导学生自主学习、自主探究、自主归纳。
本环节实行集体讨论探究的模式,由教师引导归纳,互帮互助,完成任务。
设计思路通过探究讨论学习,学生已经做好了杠杆百分表控制平行度的的知识准备,进入动手实践环节,这是本节课的教学重点。
环节教学内容教师活动学生活动视频回顾(约5分钟)通过视频回看,巩固同轴度控制中的操作流程,从而引发学生对平行度控制的操作流程的思考。
平行度公差标准全文共四篇示例,供读者参考第一篇示例:平行度公差标准是机械制造中一项非常重要的质量指标,它用来衡量物体表面与设定轴线或平面的平行程度,是保证零件装配精度和性能稳定性的一个重要因素。
平行度公差标准在设计和制造阶段都起着至关重要的作用,影响着产品的质量和生产效率。
平行度公差标准的定义和意义。
平行度是指两个平面之间的最小距离的差异,是表征平面平行程度的一个重要指标。
在工程设计和制造中,平行度公差标准是衡量和控制零件表面平行度的重要标准,其目的是保证零件之间的配合精度,降低装配过程中的摩擦和磨损,提高产品的使用寿命和可靠性。
平行度公差标准的计算方法。
在制造过程中,平行度公差通常采用最大材料原则,即在设计图纸中标注平行度公差时,取两个平行面之间最大允许距离作为公差值。
如果要求两个平行面之间的公差为0.1mm,那么实际制造过程中,两个平行面之间允许的最大距离为0.1mm,即两个平行面之间的距离不得大于0.1mm。
平行度公差标准的应用范围和重要性。
平行度公差标准在各个行业和领域都有广泛的应用,特别是在汽车、航空航天、机械制造等重工业领域中,平行度公差标准更是至关重要。
在汽车制造中,平行度公差的控制直接影响到零部件的配合精度和整车性能;在航空航天领域,平行度公差的严格要求是确保飞行器安全运行的关键因素;而在机械制造领域,平行度公差的控制是保证零件装配精度和性能稳定性的基础。
平行度公差标准的管理和控制。
为了保证产品的质量和性能,企业需要建立完善的平行度公差标准管理体系,包括对平行度标准的制定、执行和监控等。
企业可以通过制定内部标准、加强员工培训、引入自动化检测设备等方式,提高平行度公差标准管理水平,确保产品质量和生产效率。
平行度公差标准作为机械制造中的重要质量指标,对产品质量和生产效率起着至关重要的作用。
企业应该加强对平行度公差标准的管理和控制,不断提高产品质量和生产效率,为客户提供更优质的产品和服务。
第28卷第4期长春理工大学学报Vo l 128No 142005年12月J ou rnal of Changchun Un i versit y of Science and T echnologyDec .2005收稿日期:2005-08-12基金项目:振兴东北老工业基地项目(04-02GG156)作者简介:张立颖,女(1976-),硕士研究生,主要从事光学仪器装调方面的研究。
平行度检测仪的设计方法张立颖 刘德尚 王文革(中国科学院长春光学精密机械与物理研究所,长春 130031)摘 要:国内现有的平行度检测方法和检测设备都是用于检测可见光的平行度。
对于激光和红外平行度的精密检测,还没有一个好的检测方法。
本文介绍了一种既可以检测可见光又可以检测激光、红外平行度的检测仪,并且论述了设计原理、装调方法以及精度的验证,其检测精度可以达到?2d 。
关键词:平行度;激光;红外中图分类号:TH74512 文献标识码:A文章编号:1672-9870(2005)04-0033-03Design of t he L ight Parallelis m DetectorZ HANG L i y ing LIU D es hang WANG W enge(Changchun Instit u te o f Op tics ,F i n eM echanics and Phy sics ,Chinese Acade my of Siences ,Changchun 130031)Abst ract :In our nation ,w e have l o ts o f m ethods and equ i p m ents to detect the parallelis m of v isible li g h.t But w e don t 'kno w how to detect the paralle lis m of laser and i n frared ,This paper descri b es briefly the desi g n idea,asse m b l y techn i q ue and ho w to test and verify its accuracy .A t las,t we get the conclu -si o n that the accuracy of the ne w detecto r is less than ?2d ,and the dectctor can be used i n v isi b l e ligh.tK ey w ords :Pa ra lle lism;Laser ;Infrared 随着激光与红外技术的发展,红外跟踪器和激光测距机已被广泛应用在现代化的光电经纬仪上。
然而令人遗憾是,对于激光、红外系统的平行度的标校却一直没有一个令人满意的方法,无奈人们只能在几十公里外制造一个红外目标,并把这个目标假设为无穷远光源来标校激光、红外系统的平行度,这个方法测量误差大,实现也困难。
本文设计的平行度检测仪(以下简称检测仪)从根本上解决了这个难题,它的结构简单、成本低,既可以在实验室使用,又可以直接安装在红外跟踪车上,在外场随时标校激光、红外的平行度,同时它又可兼做红外目标模拟器,因此具有良好的市场前景。
1 检测仪的结构及检测原理111 检测仪的结构用于检测激光、红外平行度的检测仪的组成包括,光学部分:(1)衰减片;(2)平面镜组;(3)分光镜;(4)平行光管;(5)红外光源;(6)特制耙面。
机械部分:(1)导轨;(2)可移动支架。
用于可见光测量时,只需把红外光源更换为普通光源,将特制耙面更换为普通星点板即可。
112 检测仪的检测原理11211 检测仪的光学系统检测仪的光学系统如图1所示。
检测仪由A 、B 两个光路组成。
激光经过(光路A )衰减片衰减后,从平面镜2的周围入射到分光镜上,经过平行光管汇聚到特制耙面上,使耙面发热形成红外光源,发射出的光经过平行光管后变成平行光,经过分光镜把光分成两束,一束(光路A )原路返回,一束(光路B)进入红外接收系统。
11212 检测仪的工作过程①红外光源发射出的光经过特制耙面(此时耙面可以视为一个星点)通过平行光管变成平行光,再经过分光镜进入光路B ,并呈像在红外成像器的光轴中心。
②激光测距机发出的激光通过光路A 最终汇长春理工大学学报2005年1)衰减片;2、3)平面镜组;4、5)平行光管6)特制面;7)红外光源;8)分光镜图1光学系统图聚到耙面上,使耙面发热形成红外光源,发射出的光经过光路B呈像在红外成像器上,当成像器上的亮斑偏离中心时,调整激光测距机使亮斑呈像在红外成像器的中心。
11213检测仪的工作原理当实现工作过程①时,以红外光源作为基准,将检测仪与被检系统的相对位置调整至最佳(实验证明,这样利于提高检测精度)。
检测仪本身平行度主要取决于平面镜组的平行关系,如图2所示(零件符号参见图1)。
图2平面镜组光路原理对比图由图2可以看出只要两只平面镜保持平行,则入射光线与出射光线就总能平行。
因此,当平行镜组平行,激光发出的光斑呈在红外系统的光轴中心时,激光与红外这两个光轴就是平行的。
如果光斑偏离红外光轴中心,其偏离量即为两光轴的不平行度。
21检测仪的机械结构和装调方法211检测仪的机械结构检测仪的机械结构如图3所示(零件符号参见图1)。
检测仪的机械结构主要由导轨和支承架组成。
包括:托板、转向装置、升降杆、底座、轮子和底脚。
如果无需移动则可以去掉轮子和底脚,而将底座设计为用螺钉固定在某一基面的形式。
转向装置用来(根据需要)调整导轨角度和固定导轨。
升降杆通过一个微调机构任意升降并锁紧。
图3机械结构简图鉴于导轨的任意方向的微小变形都会直接影响检测仪的精度。
因此导轨的结构设计非常重要。
导轨采用对称结构,铸铁材料,并经时效处理,四面精磨,这样可使其不易弯曲、扭曲,由温度差异所引起的变形小,导轨的设计结构如图4所示。
图4导轨结构图212检测仪的装调方法由图2不难看出,检测仪的精度主要取决于平面镜组的平行度。
因此,在将平面镜组安装在导轨上时,以导轨底面为基面,用一台精度为012d的平行光管和一个大直径的标准平面镜将平面镜组的平行度调至?1d范围内;同样以导轨为基准,分别用平面镜、平行光管和刀口仪对件8、件4、件5进行调整,并调到?2c以内。
件6是一个可以更换靶面的装置,靶面与机械件的配合精度要满足滑配无晃量。
31精度的检测将一个测量用十字丝安装到检测仪耙面所在位置处(特制耙面去掉后),将两个012d平行光管用标准平面镜调至平行后,标定检测仪从两个光路出来的十字丝,并测量三次,其所得平均值为:34第4期张立颖等:平行度检测仪的设计方法X=+012d,Y=+018d。
41误差分析设计要求检测精度为:两束平行光平行度[?2d。
实际误差情况如表1所示。
表1误差分析序号误差因素极限误差/秒随机误差未定系统误差备注1温度误差?012每?5e带来的误差2瞄准误差?0143读数误差?0124光学刻尺误差?012由公式:D=?12E2i=1D2i+E2j=1e2j求得极限误差(单位:秒)为:D=?12(0.22+0.22)+(0.42+0.22)=?01489U?015进而:|X|+|D|=0.7"|Y|+|D|=1.3"|X|+|D|<|?2"||Y|+|D|<|?2"|因此检测结果能够满足设计要求。
5结论由于红外成像器和激光测距机在收发能量和光谱谱段方面的巨大差异,因此对不同谱段传感器之间的平行度检测装置的研制一直是光电测量设备检测领域的热点和难点之一。
本文介绍的多功能新型平行度检测仪填补了国内激光和红外检测方法方面的技术空白。
视需要,如果仪器使用精度可放宽至?10d以上,则可以将导轨及支承架材料设计为铸铝,其整体结构将更加轻便、携带亦方便,更有利于野外使用。
用于可见光测量时,可以取代拱型检测架、T型检测架、莱卡经纬仪及012d平行光管等。
现有检测仪耙面在使用过程中会有损伤,应根据需要定期更换。
相信随着技术的进步,各种元器件、材料性能的不断发展、完善,新型无需更换的耙面很快将面世,定期更换耙面的问题也将随之得到解决。
参考文献[1]杨志文.光学测量[M].北京:北京理工大学出版社,1995.[2]费业泰.误差理论与数据处理[M].北京:机械工业出版社,2000.[3]杜戈果,邓莹,陈慧玲.拉曼光纤激光器的初步研究[J].激光与红外,2004,34(3):169-171.[4]江涛,王永仲.空时级联滤波红外点目标检测[J].光电工程,2004,31(12):17-19.[5]王晓丽,张重.基于外光电效应的智能型SF6检漏仪的研究[J].长春理工大学学报,2005,28(2):36 -39.[6]KE HTARNAVA Z N,OH H J.D evelop m ent and rea l-ti m e i m ple m entati on of a rule-based auto-focus a l go-r it h m[J].R eal-T i m e I m ag i ng,2003,9(3):197-203.35。