SIMULTANEOUS REGISTRATION OF MULTIPLE VIEWS OF A 3D OBJECT
- 格式:pdf
- 大小:457.20 KB
- 文档页数:6

工作职责英文工作职责英文篇一:英语工作职责行业开发经理-OEMIndustr Development Manager - OEM Primar Aountabilit 基本职责 To identif, develop and maintain ustomers ithin an assigned industr and region. 确认、开发及维护在指定行业和区域内的客户。
Ke Aountabilities 重要职责1. Industr Planning and development 行业规划及开发?? Develop industr database and ontat information ithin target industries 在目标行业内建立、开发数据库和相关联系信息??3. Develop aount management plans, inluding all plans, primar ontats, et. based on industr aount target list 根据行业客户目标列表,开发客户管理计划,包括电话销售计划、基础联系信息等4.Ne Aount Selling 新客户的销售??5. Priorities opportunities and integrate all planning ith Field Sales staff in branhes6. 给予分公司的销售人员优先机会和综合的电话销售计划??7. Condut joint sales alls ith Field Sales staff on identified opportunities and introdue or provide remendations on Hagemeer produts and servies8. 就已确定的业务机会与销售人员进行联合电话销售,并对海格曼产品和服务进行介绍或提供建议??9. Follo up ith Field Sales on prior sales alls andidentified aounts 与销售人员共同跟进先前的销售电话和已确定的客户??10. Engage high value major aount prospets and explore identif longer term strategi produt and servie needs. 开发高价值的主要客户,开拓确定长期产品和服务的战略需要?? 11. Follo up identified Customer opportunities for solution selling opportunities. 跟进已确认的客户机会,以便找出销售实施方案。

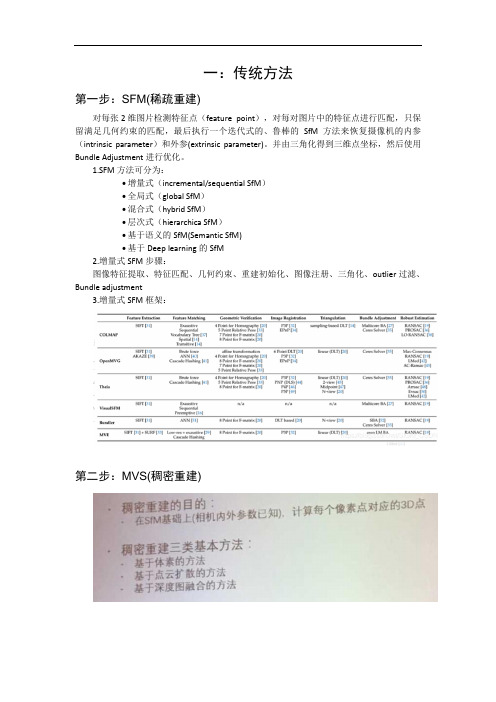
一:传统方法第一步:SFM(稀疏重建)对每张2维图片检测特征点(feature point),对每对图片中的特征点进行匹配,只保留满足几何约束的匹配,最后执行一个迭代式的、鲁棒的SfM方法来恢复摄像机的内参(intrinsic parameter)和外参(extrinsic parameter)。
并由三角化得到三维点坐标,然后使用Bundle Adjustment进行优化。
1.SFM方法可分为:•增量式(incremental/sequential SfM)•全局式(global SfM)•混合式(hybrid SfM)•层次式(hierarchica SfM)•基于语义的SfM(Semantic SfM)•基于Deep learning的SfM2.增量式SFM步骤:图像特征提取、特征匹配、几何约束、重建初始化、图像注册、三角化、outlier过滤、Bundle adjustment3.增量式SFM框架:第二步:MVS(稠密重建)第三步:建模1.三角网格建模(meshlab)2.LOD建模(得到标准城市模型)3.BIM建模(得到标准建筑物模型) 商业软件:二:RGB-DRGB-D设备:RGB-D设备为Microsoft Kinect V2 3D体感摄像机。
拍摄方式:摄像机拍摄6个角度的物体(物体旋转60°),每个角度拍摄五帧,获得五帧深度图像及彩色图像。
PCL(Point Cloud Library,点云库)第一步:深度图像的获取景物的深度图像由Kinect在Windows平台下拍摄获取,同时可以获取其对应的彩色图像。
为了获取足够多的图像,需要变换不同的角度来拍摄同一景物,以保证包含景物的全部信息。
具体方案既可以是固定Kinect传感器来拍摄旋转平台上的物体;也可以是旋转Kinect 传感器来拍摄固定的物体。
价格低廉、操作简单的深度传感器设备能够获取实时的景物深度图像,极大的方便了人们的应用。

syn 配准方法摘要:一、引言二、syn配准方法概述1.定义及作用2.发展历程三、syn配准方法分类1.基于模型的配准方法2.基于图像的配准方法四、syn配准方法的应用1.医学影像处理2.计算机视觉3.机器人导航与控制五、syn配准方法的优缺点1.优点2.缺点六、发展趋势与展望七、结论正文:一、引言syn配准方法作为多模态图像配准技术的一种,近年来在国内外研究取得了丰硕的成果。
syn配准,全称为Simultaneous Registration of multiple Modalities,意为同时配准多模态图像。
它通过对不同成像方式获取的图像进行空间对齐,实现多模态图像信息的融合,从而为临床诊断、科学研究等领域提供更为精确的图像数据。
二、syn配准方法概述1.定义及作用syn配准方法是指同时对多幅图像进行配准,并将它们融合为一个统一的坐标系统。
其目的是消除不同成像设备引起的几何差异,提高图像的质量和对比度,以便于后续的图像分析。
syn配准在多模态图像处理领域具有重要意义,为医生提供更为精准的诊断依据,同时也为患者带来更好的治疗效果。
2.发展历程syn配准方法的发展可以追溯到20世纪90年代,随着医学影像设备的不断更新换代,多模态图像融合逐渐成为研究的热点。
从最初的基于灰度值的配准方法,到后来的基于变换矩阵、基于特征点、基于深度学习等方法,syn配准技术不断演进,为临床应用提供了丰富的选择。
三、syn配准方法分类1.基于模型的配准方法基于模型的syn配准方法主要利用先验知识建立图像间的几何关系,通过优化算法求解变换参数。
这类方法包括:仿射变换、刚体变换、变换矩阵等。
2.基于图像的配准方法基于图像的syn配准方法主要依赖图像间的相似性度量进行配准,包括:互信息、巴氏距离、高斯过程回归等。
这类方法直接在图像域进行操作,避免了复杂的模型计算,具有较高的实时性。
四、syn配准方法的应用1.医学影像处理syn配准方法在医学影像处理领域取得了广泛的应用,如:脑部磁共振成像(MRI)与计算机断层扫描(CT)图像的配准,心脏核素显像与心脏磁共振图像的配准等。

医学图像配准技术A Survey of Medical Image Registration张剑戈综述,潘家普审校(上海第二医科大学生物医学工程教研室,上海 200025)利用CT、MRI、SPECT及PET等成像设备能获取人体内部形态和功能的图像信息,为临床诊断和治疗提供了可靠的依据。
不同成像模式具有高度的特异性,例如CT通过从多角度的方向上检测X线经过人体后的衰减量,用数学的方法重建出身体的断层图像,清楚地显示出体内脏器、骨骼的解剖结构,但不能显示功能信息。
PET是一种无创性的探测生理性放射核素在机体内分布的断层显象技术,是对活机体的生物化学显象,反映了机体的功能信息,但是图像模糊,不能清楚地反映形态结构。
将不同模式的图像,通过空间变换映射到同一坐标系中,使相应器官的影像在空间中的位置一致,可以同时反映形态和功能信息。
而求解空间变换参数的过程就是图像配准,也是一个多参数优化过程。
图像配准在病灶定位、PACS系统、放射治疗计划、指导神经手术以及检查治疗效果上有着重要的应用价值。
图像配准算法可以从不同的角度对图像配准算法进行分类[1]:同/异模式图像配准,2D/3D图像配准,刚体/非刚体配准。
本文根据算法的出发点,将配准算法分为基于图像特征(feature-based)和基于像素密度(intensity-based)两类。
基于特征的配准算法这类算法利用从待配准图像中提取的特征,计算出空间变换参数。
根据特征由人体自身结构中提取或是由外部引入,分为内部特征(internal feature)和外部特征(external feature)。
【作者简介】张剑戈(1972-),男,山东济南人,讲师,硕士1. 外部特征在物体表面人为地放置一些可以显像的标记物(外标记,external marker)作为基准,根据同一标记在不同图像空间中的坐标,通过矩阵运算求解出空间变换参数。
外标记分为植入性和非植入性[2]:立体框架定位、在颅骨上固定螺栓和在表皮加上可显像的标记。

一、概述在计算机视觉和机器人领域,三维点云配准是一个重要的问题,配准算法的性能直接影响着三维重建、SLAM(Simultaneous Localization and Mapping)等应用的效果。
本文将介绍一种基于Python语言的三维点云配准算法的实现,希望能够为相关研究和开发工作提供一些参考。
二、背景知识1. 三维点云三维点云是由大量点构成的三维空间数据集合,通常用于表示物体的表面形状和结构。
在实际应用中,我们往往需要对不同位置、角度或时间采集到的三维点云数据进行配准,即找到它们之间的对应关系,以便进行后续的分析和处理。
2. 点云配准点云配准是指将两个或多个不同位置或角度的点云数据进行对齐,使它们在同一坐标系下表现出一致的空间位置关系。
常见的配准方法包括ICP(Iterative Closest Point)算法、特征匹配算法等。
三、算法实现在本文中,我们将以Python语言为例,介绍一种基于ICP算法的点云配准实现。
ICP算法是一种迭代优化算法,通过不断更新点云之间的对应关系,最终达到最优的配准效果。
1. 数据准备我们需要准备两组三维点云数据用来进行配准。
这里我们采用numpy 库来表示点云数据,使用matplotlib库来进行可视化展示。
假设我们已经分别从传感器或其他数据源中获取到了两组点云数据,分别保存为numpy数组points1和points2。
2. 初始对齐在进行ICP算法之前,我们需要先对两组点云进行初步的对齐操作,以减小配准时的迭代次数。
这一步可以使用旋转、平移等刚体变换来实现,具体方法可以根据实际情况选择。
3. ICP算法迭代ICP算法的核心在于不断更新两组点云之间的对应关系,并通过最小化它们之间的距离来实现最优配准。
在Python中,我们可以使用scipy 库中的spatial.distance.cdist函数来计算两组点云之间的距离矩阵,然后根据距离矩阵来更新对应关系。
Fast phase-based registration of multimodal image dataa Systems Design Engineering, University of Waterloo, 200 University Avenue West, Waterloo, Ontario, Canada N2L 3G1Received 19 July 2008;revised 14 October 2008;accepted 18 October 2008.Available online 5 November 2008.AbstractAn interesting problem in pattern recognition is that of image registration, which plays an important role in many vision-based recognition and motion analysis applications. Of particular interest among registration problems are multimodal registration problems, where the images exist in different feature spaces. State-of-the-art phased-based approaches to multimodal image registration methods have provided good accuracy but have high computational cost. This paper presents a fast phase-based approach to registering multimodal images for the purpose of initial coarse-grained registration. This is accomplished by simultaneously performing both globally exhaustive dynamic phase sub-cloud matching and polynomial feature space transformation estimation in the frequency domain using the fast Fourier transform (FFT). A multiscale phase-based feature extraction method is proposed that determines both the location and size of the dynamic sub-clouds being extracted. A simple outlier pruning based on resampling is used to remove false keypoint matches. The proposed phase-based approach to registration can be performed very efficiently without the need for initial estimates or equivalent keypoints from both images.Experimental results show that the proposed method can provide accuracies comparable to the state-of-the-art phase-basedimage registration methods for the purpose of initial coarse-grained registration while being much faster to compute.Keywords: Image registration; Phase; Fast Fourier transform; Multimodal; Keypoints; Dynamic sub-cloudsArticle Outline1. Introduction2. Multimodal registration problem3. Previous work4. Proposed registration algorithm4.1. Keypoint detection and sub-cloud size estimation4.2. Phase sub-cloud extraction4.3. Simultaneous sub-cloud matching and feature space transformation estimation4.4. Solving the simultaneous matching and feature space transformation estimation problem in the frequency domain4.5. Outlier pruning through resampling4.6. Algorithm outline5. Computational complexity analysis6. Experimental results7. Conclusions and future workAcknowledgementsReferences1. IntroductionImage registration is the process of matching points in one image to their corresponding points in another image. The problem of image registration plays a very important role in many visual and object recognition and motion analysis applications. Some of these applications include visual motion estimation [1] and [2], vision-basedcontent-based retrieval [3] and [4], image registration [5], [6], [7] and [9], and biometric authentication [10]. In the best case scenario, the images exist at the same scale, in the same orientation, as well as represented in the same feature space. However, this is not the case in most real-world applications. There are many situations where the images exist in different feature spaces. This particular problem will be referred to as the multimodal registration problem and is a particularly difficult problem to solve. Examples of this problem in real-world situations include medical image registration and tracking ofMRI/CT/PET data [11] and building modeling and visualization using LIDAR and optical data [12] and [13].There are several important issues that make multimodal registration a difficult problem to solve. First, many registration algorithms require that equivalent keypoints be identified within each image. However, given thedifferences between feature spaces in which the images exist, it is often a very difficult task. The significant differences between feature spaces also make it impractical to perform direct intensity matching between the two images. In recent years, an effective approach to multimodal registration has been proposed that utilizes local phase [14] and [15]. This state-of-the-art approach evaluates the mutual information between the local phase of two images to determine the optimal alignment and has been shown to be very effective at matching multimodal medical image data, outperforming existing multimodal registration methods [14] and [15]. However, this approach is computationally expensive (O(N6) for the mutual information evaluation process). As such, a registration method that is able to take advantage of local phase information to determine point correspondences between images while being computationally efficient is highly desired for the purpose of initial coarse-grained registration.The main contribution of this paper is fast phase-based registration algorithm for aligning multimodal images. The proposed method is designed to provide a fast alternative to the phase-based registration algorithm proposed by Mellor et al. [15]. It is important to note that the main contributions of this paper reside in the methods for keypoint detection and dynamic sub-cloud extraction, as well as the method for simultaneous phase correspondence evaluation and featuretransformation estimation, not in the outlier pruning scheme. Furthermore, the proposed method is designed for fast initialcoarse-grained matching and by no means guarantee the smoothness of the global data correspondence problem. A fine-grained matching method can be used after the initial matching to provide improved alignment based on global smoothness constraints.2. Multimodal registration problemThe multimodal registration problem can be defined in the following manner. Suppose there exist two images f and g, where points in f and g are represented using two different feature spaces, respectively. For every point in f, the goal of registration is to determine a corresponding point in g such that the highest degree of correspondence can be found between f and g. This problem can be alternatively be formulated as finding the optimal transformation T that maps all points from f to the points from g such that the highest degree of correspondence can be achieved. The relationship between f and g can be defined as(1)where and are coordinate vectors corresponding to f and g,respectively, and T is a transformation that maps points from f to g.Based on the above relationship, the multimodal registration problem can be formulated as a minimum distance optimization problem, with the distance representing the degree of data correspondence between two images expressed as(2)where D is the distance function that is inversely proportional to the degree of correspondence between feature points. Low values of D indicate a high level of correspondence between the images.3. Previous workA large number of methods have been proposed for the purpose of image registration. In general, current methods can be grouped into four main types:(1) Methods based on relative distances [16], [17], [18] and [19].(2) Methods in the frequency domain [20], [21] and [22].(3) Methods based on direct comparisons [6], [7], [8], [9], [23], [24], [25], [26] and [27].(4) Methods based on extracted features [14], [15], [28], [29], [30], [31], [32], [33], [34], [35] and [36].Methods based on relative distances exploit the spatial relationships between neighboring pixels within an image to determine the best match between two points. These algorithms are based on the assumption that if a point in image f, p f,0, has a corresponding point in image g, p g,0, then there exist other points in f, {p f,1,p f,2,…,p f,n}, that have a corresponding points in g, {p g,1,v g,2,…,p g,n}, such that the distance between p f,0 and point p f,k is equal to the distance between p g,0 and point p g,k. Methods based on relative distances are primarily useful for situations where the transformation between the images consists only of translations and rotations.Methods in the frequency domain [20], [21] and [22] exploit the frequency characteristics such as phase to estimate the transformation between two images. A common frequency domain registration method is phase correlation, where the Fourier coefficients calculated from image f are divided by that calculated from image g. Performing the inverse transform on the result yields a single peak indicating the translation that matches the two images. This technique has been extended to account for global rotations and scale by Reddy et al. [21]. As such, frequency domain methods are only suited for globally rigid point correspondences. Methods based on direct comparisons [6], [7], [8], [9], [23], [24], [25], [26] and [27] attempt to find data point correspondences between twoimages by performing point matches directly in their respective feature spaces. Many techniques in this group make use of feature information from neighboring data points to determine the similarity between two data points. Some common similarity metrics used in direct comparison methods include maximum likelihood [5], correlation [23] and [26], and mutual information [6], [7], [8] and [9]. Of particular interest in recent years are techniques based on mutual information, which attempt to match data points by finding the mutual dependence between the images. The key advantage of techniques based on mutual information is that it allows images existing in different feature spaces to be compared in a direct manner. However, such techniques also require good initial match estimates to produce accurate results as they are veryunder-constrained in nature. Furthermore, techniques based on mutual information are computationally expensive and may not be practical for certain situations where computational speed is important. A comparison between the computational complexity of mutual information-based techniques and the proposed method will be discussed later on in the paper.In methods based on extracted features [14], [15], [28], [29], [30], [31], [32], [33], [34], [35] and [36], the images are compared indirectly using extracted features that exist in a common feature space. Common features used in such methods include contours [29] and [30],invariant moments [34] and [35], orientation [33] and [36], and shape properties [28]. By comparing methods using derived features in a common feature space, this allows such techniques to match images existing in different feature spaces in cases where similar features can be extracted from both images.In recent years, an effective approach has been proposed for the purpose of multimodal registration that evaluates the mutual information between the local phase of images to determine optimal point correspondences [14] and [15]. This state-of-the-art approach improves mutual information performance by reducing feature non-homogeneities and accentuating structural information, and has been shown to be very effective at finding correspondences between medical imaging data acquired using different medical imaging modalities. However, this approach suffers from the same computational cost issues associated with mutual information-based methods. The primary goal of this paper is to provide a fast approach to phase-based image registration that provides comparable accuracy at a significantly reduced computational cost.4. Proposed registration algorithmThe proposed approach to phase-based image registration can be divided into three main parts. First, keypoints are selected andsub-clouds are extracted using a multiscale phase-based keypoint extraction method, as described in Sections 4.1 and 4.2. A simultaneous globally exhaustive phase correspondence evaluation and feature space transformation estimation scheme is performed between the phasesub-clouds from one image over all translations and local rotations of the other image, as described in Sections 4.3 and 4.4. A simple outlier pruning scheme based on resampling is used to remove erroneous matches and the transformation that maps data points from one image to the other, as described in Section 4.5. The main contributions of the proposed framework is a novel multiscale phase-based keypoint and sub-cloud extraction scheme, as well as a novel simultaneous globally exhaustive phase sub-cloud correspondence evaluation and feature space transformation estimation scheme.4.1. Keypoint detection and sub-cloud size estimationIn conventional keypoint-based registration algorithms, a set of keypoints {p g,10,p g,20,…,p g,n0} are extracted from each image to construct sub-clouds {C(p g,10),C(p g,20),…,C(p g,n0)} of a certain size [35]. This is done for several reasons. First, it is computationally expensive to match every data point in one image to those in the other image. As such, it is much more computationally efficient to select a subset of points within each image that can be used to estimate the overall mapping between thetwo images. Second, it can be said that a majority of points within a image cannot be uniquely distinguished from other points based on its neighboring points. As such, these non-unique points can result in false point correspondences. Therefore, it is intuitive that only points that are distinctive be considered in the registration process.One of the issues encountered in many registration methods is that they require that equivalent keypoints be identified within each image. What this means is that for every keypoint selected from image f, there must exist a corresponding keypoint selected from image g for a valid keypoint match to occur. While it is relatively easy to determine equivalent keypoints in cases where the images exist in the same feature space, it is considerably more difficult to do so in cases where the images exist in significantly different feature spaces. If equivalent keypoints are not selected in both images, correct keypoint matches will not be found. The proposed algorithm removes the need for equivalent keypoints by looking at the problem from a different perspective. Suppose that a distinctive keypoint p g is detected in image g. Ideally, there exists a corresponding keypoint p f in image f that is distinctive based on its neighboring points. In such a situation, it is intuitive that p f will likely be found if p g is compared with all points in f. Therefore, if every point in f is selected as a keypoint, a correct keypoint match will theoretically befound for every distinctive keypoint in g. In the proposed algorithm, every point in f is selected as a keypoint.There are several advantages to this approach. First, it ensures that a correct keypoint match for a keypoint in g is possible. This is in contrast to methods that attempt to determine keypoints in both images independently, which does not guarantee a correct match is possible. Second, since only distinctive keypoints are selected from g, the presence of non-distinctive keypoints in f will have a lesser impact on the accuracy of keypoint matches. Finally, since only a small set of points are selected as keypoints from g, the computational complexity is significantly lower than an exhaustive evaluation between all possible point pairs between the two images.Another issue that must be dealt with during the keypoint detection stage is determining the size of individual sub-clouds centered around each keypoint. The size of a sub-cloud should be adjusted in an adaptive manner to account for the feature characteristics of the underlying image. For example, smaller sub-clouds should be used in situations where the feature characteristics around a keypoint are most distinctive at a finer scale. Conversely, larger sub-clouds should be used in situations characterized by feature characteristics that are most distinctive at alarger, coarser scale. Therefore, a method for determining the size of individual sub-clouds is desired.Various algorithms have been proposed for the purpose of keypoint detection [37], [39], [40], [41], [42], [43] and [44]. However, there are drawbacks to these techniques. Most commonly used keypoint detection algorithms such as that proposed by Harris et al. [41], the DoG maxima method used by Lowe et al. [37], and the wavelet-based method proposed by Fauqueur et al. [39] are highly sensitive to datanon-homogeneities, where the same data content is represented by different data point values due to certain conditions. For example, in the case of MRI data volumes, RF inhomogeneity conditions can result in significant data non-homogeneities in the constructed data volume [38]. Furthermore, many of these techniques utilize Gaussian pre-filtering to suppress noise in the image, which can also significantly reduce the distinctiveness of data characteristics for the purpose of keypoint detection.A better approach to keypoint detection that addresses the issue associated with data non-homogeneities can be developed based on the feature significance measure introduced by Kovesi [44], which uses local phase characteristics obtained from complex-valued wavelets. By utilizing only the phase information, this measure of feature significanceis largely invariant to data non-homogeneities. Furthermore, this measure is highly robust to noise without the need for pre-filtering, provides improved localization over existing measures, and accounts for variations due to orientation. The proposed method builds upon this measure of feature significance to create a novel keypoint detection and sub-cloud size estimation algorithm.The proposed keypoint detection and sub-cloud size estimation scheme can be described as follows. The local amplitude and phase at each point in image g is computed over multiple scales and orientations using complex-valued wavelets such as logarithmic Gabor wavelets. The local amplitude and phase at a particular point at wavelet scale n is computedbased on a pair of even-symmetric and odd-symmetric wavelets andat scale n,(3)(4)The local phase coherence at point , orientation θ, and over a range of N scales can then be computed as(5)(6)where W represents the frequency spread weighting factor, A n and φnrepresent the amplitude and phase at wavelet scale n, respectively, represents the weighted mean phase, T represents the noise threshold and ε is a small constant used to avoid division by zero. The parameters used to compute local phase coherence is the same as that described in [44]. The feature significance at point can then be computed as the minimum moment of local phase coherence based on the local phase,θ2,…,θl},coherence at different orientations {θ(7)The feature significance increases with the increase of μ. Once the minimum moment of local phase coherence has been determined, the keypoint locations of g are determined at the local minimum moment maxima using non-maximal suppression.Once the keypoints of g have been selected, it is necessary to identify the dominant scale, s, at which the keypoint is most distinctive. This is achieved by computing the minimum moment of local phase coherence μs at each keypoint p g,i0 over a fixed range of scales {s1,s2…,s z} and finding the maxima of minimum moment of local phase coherence over the scales,(8)The radius of an individual sub-cloud centered at keypoint p g,i0 can then be determined as(9)r(p g,i0)=λs(p g,i0)-1r min,where λ is the scale size and r min is the minimum radius size. During testing, λ=1.5 and r min=10 was found to provide good results and so are used for testing purposes. However, these parameters can be tuned specifically based on a particular application for improved performance.4.2. Phase sub-cloud extractionOnce the keypoints {p g,10,p g,20,…,p g,n0} have been detected from g, a set of phase sub-clouds {C(p g,10),C(p g,20),…,C(p g,n0)} of neighboring points is extracted around the keypoints. This is based on the assumption that if a keypoint in g, p g,i0, corresponds to a keypoint in f, p f,i0, then its neighboring data points in g will have corresponding points in f such that the distances between p g,i0 and its neighboring points {p g,i1,…,p g,im} will be equal to the distances between p f,i0 and the corresponding points{p f,i0,…,p f,im}, where m is the number of neighboring points. This assumption is very similar to that made in methods based on relative distances. However, by selecting a phase sub-cloud of neighboring points, the assumption is only made from a local perspective. This leads to a second assumption:The relative distances between a keypoint p g,i0 and its neighboring points {p g,i1,…,p g,im} within a sub-cloud in g is approximately equivalent to the relative distances between its corresponding keypoint p f,i0 and its neighboring points {p f,i1,…,p f,im} within a sub-cloud in f. However, therelative distances between a keypoint and all other points in g is not equivalent to the relative distances between its corresponding keypoint and all other points in f.The second assumption implies that, under geometric distortions, the spatial relationships between local neighboring points are largely maintained but variations in global spatial relationships between points can still occur. Without this assumption, it would not be feasible to match keypoints based on its neighboring data points.For the proposed algorithm, the intermediate phase sub-cloud E(p g,00) of a keypoint p g,00 is determined as all points {p g,i1,…,p g,im} that is bounded by a circle centered at p g,00 and radius r(p g,00) (as determined during the keypoint detection and sub-cloud size estimation process),(10)r(p g,00)2=(x-x pg,00)2+(y-y pg,00)2.To take better advantage of the spatial relationships between neighboring points while reducing the amount of non-distinctive points within a phase sub-cloud, the proposed algorithm constructs dynamically shaped phase sub-clouds {C(p g,10),C(p g,20),…,C(p g,n0)} based on keypoint triplets. Suppose that a keypoint triplet is constructed from an arbitrary keypoint in g, p g,10, and its two nearest neighbor keypoints p g,20 and p g,30.A larger phase sub-cloud C(p g,10) may be formed from the keypointtriplet by combining the individual phase sub-clouds{E(p g,10),E(p g,20),E(p g,n0)} formed around each of the three keypoints. Therefore, the combined phase sub-cloud C(p g,10) can be expressed as(11)An example of this combined sub-cloud is illustrated in Fig. 1. This combined phase sub-cloud will be referred to as a triplet phasesub-cloud. The key advantage of this triplet phase sub-cloud is that it preserves the distinctiveness of the individual phase sub-clouds while taking better advantage of the spatial relationships between keypoints. As such, a triplet phase sub-cloud is extracted for each keypoint. It is important to note that the overall shape of a triplet phase sub-cloud may vary from keypoint to keypoint as it depends on the spatial relationship between a keypoint and its two nearest neighbor keypoints.Full-size image (5K)Fig. 1. Combined phase sub-cloud from keypoint triplets.4.3. Simultaneous sub-cloud matching and feature space transformation estimationOnce a set of triplet phase sub-clouds {C(p g,10),C(p g,20),…,C(p g,n0)} have been extracted, sub-cloud matching is performed between each keypoint p g in g and every point p f in f. Since triplet phase sub-clouds were not explicitly extracted from f, it is intuitive to vary the triplet phasesub-cloud C(p f) for a point in f based on the shape of the triplet phase sub-cloud C(p g) in g with which it is being evaluated against. Therefore, a different triplet phase sub-cloud C i(p f,j) is dynamically formed for the point in f for each triplet phase sub-cloud C(p g,i) it is matched against in g. This concept is illustrated in Fig. 2.Full-size image (16K)Fig. 2. Triplet phase sub-cloud matching: note that the phase sub-cloud at data point p f,0 changes depending on the phase sub-cloud it is being matched against in g.As stated earlier, the use of mutual information to evaluate the similarity of local phase information, as proposed by Mellor et al. [14] and [15], has very high computational complexity and is impractical in certain situations. Therefore, a faster approach that produces comparable results is highly desired.Instead of using mutual information, the proposed algorithm evaluates the similarity between triplet phase sub-clouds using a simple sum of squared distance metric. The similarity between a triplet phasesub-cloud at and a triplet phase sub-cloud atmay be expressed as the sum of squared distances between the local phase φf and φg within the sub-clouds,(12)where(13)where p min,g is the keypoint in the triplet closest to . Therefore, the minimum distance optimization problem between a triplet phasesub-cloud over all triplet phase sub-clouds can be expressed as(14)where tis an optimal translation vector between keypoint and its, the location of can becorresponding point . By finding tdetermined as(15)The biggest issue with this basic similarity evaluation formulation between triplet phase sub-clouds is that, while using local phase alleviates much of the problems associated with data non-homogeneitiesinherit within an image, the local phase values of images with significantly different feature spaces are often not directly comparable. This is because the local phase of features in significantly different feature spaces can exist in different feature spaces themselves. Therefore, the basic formulation is poorly suited for situations characterized by images with significantly different feature spaces. Mellor et al. address this issue through the use of mutual information, which can be seen as a statistical approach to implicit feature space transformation, as the feature space changes depending on the alignment of the images. However, this approach is computationally expensive, particularly for large images.In the proposed algorithm, a fast polynomial approximation approach to implicit feature space transformation is used instead to find the correspondence between phase sub-clouds. Rather than dynamically changing the feature spaces of both phase sub-clouds, the proposed algorithm attempts to determine a feature space transformation function that transforms the feature space of a triplet phase sub-cloud in f to that of a triplet phase sub-cloud it is being evaluated against in g. As such, a different feature space transformation function is implicitly computed for each pair of phase sub-clouds being evaluated.The proposed algorithm models the feature space transformation function between two phase sub-clouds as a polynomial function,(16)where a i is the i th coefficient of the polynomial. Integrating the n th-order feature space transformation function into the sum of squared distance similarity function yields the following expression:(17)Given this new combined phase sub-cloud similarity evaluation and feature space transformation estimation function, the minimum squared distance problem must also account for the coefficients {a0,…,a n}. The modified minimum distance optimization problem between a triplet phasesub-cloud over all triplet phase sub-clouds can be expressed as(18)By combining the phase sub-cloud similarity metric and feature space transformation model into a single combined metric, both phasesub-cloud matching and feature space transformation estimation processes are evaluated in a simultaneous manner.One aspect that has not been accounted so far is the effect of local rotations on phase sub-cloud matches. While the assumptions made about local spatial relationships still hold true, the coordinates of the data points being compared within each phase sub-cloud are no longer the same. One method of improving the robustness of the proposed algorithm to local rotations is to introduce additional sub-clouds by rotating the sub-cloud boundary for a sub-cloud at different angles. The sub-cloud boundary of the new sub-clouds at keypoint p g,i can be expressed as(19)where is the rotation matrix for . What this means is that a tripletphase sub-cloud within f must also be compared to the newly introduced phase sub-clouds within g as well. Integrating local rotations into (18) produces the following problem formulation:(20)where is the similarity between a sub-cloud in f and a sub-cloud in gcreated by rotating its sub-cloud boundary by . For testing purposes, a。
HikvisionTemperature Screening SolutionHuman Skin-Surface temperature is an important indicator of physical health.In many scenarios, people with abnormal skin-surface temperature need to be detected quickly and accurately in order to take measures to prevent a situation from becoming dangerous.ForewordCurrent Situation•Close contact among users, leading to high risk of infection.Close Contact, High Risk•Lots of manpower invested.•Person-by-person inspection is inefficient.High Cost, Low Efficiency•Manual registration is required, which may lead to human error and not so timely feedback.Difficult to Collect StatisticsTraditional methods like using the ear thermometer or mercury thermometer perform well in detecting people with abnormal skin-surface temperature. However, all of these methods haveobvious and significant deficiencies:•Effectively reducing manpower and the duration of skin-surface temperature measurement.•Producing real-time and accurate temperature measurement data for management and decision-making.Better ApproachUsing machines instead of manpower alone is a much better choice in many aspects.•Reducing the contact among people. Thedetection process can be fast and convenient , as imperceptible as possible, and canminimize the impact on people's daily travel.Solution Business FlowLocating potential elevatedtemperature Double check with mercury or earthermometers.134SAFEDistant and accurate check withoutphysical contact, reducing cross-infection possibilities.EFFICIENTAutomatic alarm triggering, reducing manpower invested.ADAPTABLEMultiple product types, easy to deploy, and suitable for different scenarios.TRACEABLECombining temperature, image and face identification for easy management and query.人体测温黑体Fast preliminary temperature screening without contact2Human skin-surface temperaturemeasurementEnteringTemperature Screening with Fast DeploymentSolution 1✓Entrances with short-term requirements✓Unsuitable for complicated wiring and installation1-1 Thermographic CamerasVisualized Bi-spectrum Live View1-2 Wireless DevicesEasy Connection, Cable Free⏹With Thermographic Camera⏹With Handheld Thermographic Camera1-3 Metal Detector DoorsReal-time Sound and Light Alarm⏹With Metal Detector DoorGroup Temperature ScreeningSolution 2Temperature Screening with Access Control ✓Indoor space without wind✓Security control and Temperaturescreening at the entrance which has a route to guide people flow⏹With MinMoe Wall-Mounting Touch-free Temperature Screening TerminalSolution 3✓Indoor open space without wind ✓Large people flow✓Temperature screening on crowdsHigh-risk Group Screening with High Efficiency⏹With Thermographic Bullet CameraTouch-Free, Access is Easier but SaferSolution 4Temperature Screening on Patrol✓Indoor open space without wind✓Patrolling without a fixed route Anytime, Anywhere, Just one click.⏹With Handheld Thermographic Camera Solution 5✓Indoor open space without wind✓Face recognition with mask onTemperature Screening & Mask DetectionIntuitive Demonstration⏹With Thermographic Camera &DeepinMind NVRVisualized Bi-spectrum Live ViewTemperature Screening with Fast Deployment –Thermographic CamerasSolution IntroductionProduct Design•Indoor space without wind•Route for passenger flow is recommended• 5 minutes’ stay after entrance is recommended •Use the Black Body calibrator to improve the accuracy to ±0.3℃•Local video storage with HikCentral & pStor, no need for NVR•Thermal: 160 ×120, lens: 3 mm / 6 mm •Optical: 2688 ×1520, lens: 4 mm / 8 mm •Accuracy: ±0.5℃(±0.3℃with black body)•Measurement range: 30-45℃•Working temperature: 10-35℃•Embedded audio alarm for abnormaltemperatures•AI detection to reduce false alarms by other heat resourcesDS-2TD1217B-3/6 PA DS-2TD2617B-3/6 PA PoE SwitchBlack body (optional)LaptopTemperature screening CameraBlack body PoE switchLaptop HikCentral-Professional and PstorTripod Tripod Adaptor Distance between camera and people: 0.8-1.5 m (3 mm lens) 1.5-3m (6 mm lens)Installation height is 1.5 mDistance between camera and Black Body calibrator: 1 m (3 mm lens), 2 m (6 mm lens). Keep the Black Body in the upper left /upper right corner of the camera’s viewDouble check by mercurythermometer, ear thermometer etc.Thermographic Bullet CameraThermographic Turret Camera11HikCentral-Professional and Pstor Note: HikCentral Professional & Pstor only need i5 & 16G RAM LaptopProduct DesignSolution IntroductionEasy Connection, Cable FreeTemperature Screening with Fast Deployment -Wireless Devices•For building entrances,elevator halls, airport securitychecks, etc.•Wireless deployment withoutcables (by the app or theiVMS-4200 client)•Indoor space without wind•Route for passenger flow isrecommended• 5 minutes’ stay after entranceis recommendedDistance between camera andpeople: 1 -2mInstallation height is 1.5 mDouble check by mercurythermometer, ear thermometer etc.•Thermal resolution: 160 ×120 ;•Optical resolution: 640 ×480 ;•Accuracy: ±0.5℃•Measurement range: 30-45℃• 3.5” LCD touch screen•Supports Wi-Fi hotspot, live view on PC or mobile client for lesseye fatigue•Supports real-time audio alarm and automatic uploading ofscreen capturesHandheld thermographiccameraTripodHik-Thermal appHandheld thermographic cameraHotspotLaptop iVMS-4200DS-2TP21B-6AVF/W 1-2•Long-term Temperature screening with metal detector door for entrancesof police station, subway station, airport security check, etc.•Indoor space without wind.•Thermographic turret camera fixed on walk-through metal detector door.Real-time Sound and Light AlarmTemperature Screening with Fast Deployment –Metal Detector DoorsSolution Introduction•18 independent detection zones, •7-inch LCD temperature indicator •2,200 mm * 850 mm * 480 mm•Thermal imaging resolution: 160 * 120•Temperature measurement accuracy: ±0.5 ℃•Temperature measurement range: 30-45 ℃•Onboard audio alarm for abnormal temperature or metal.ISD-SMG318LT-FProduct DesignReal-time alarm monitoring Double check by mercury thermometer, ear thermometer etc.Measurement distance: 0.8 m – 1.5 mHuman height between 1.45 m -1.85 mLCD screen to display the temperature PoE SwitchNVRMetal Detector Laptop1-3Entrance of office building Entrance of terminalEntrance of college buildingEntrance of dormitory Entrance of supermarket Elevator hall of parking lot Entrance of restaurantSchoolOffice Building RetailAirportApplication Scenarios1Security Check at Airport•Long-term Temperature screening with access control for building related projects•Indoor space•Centralized management for access control with temperature recordsSolution IntroductionProduct DesignSwitchNVRVMS HikCentral-Professional server(optional)VMS HikCentral-ProfessionalControl ClientDouble check by mercurythermometer, ear thermometer etc.Normal temperature Abnormal temperatureVMS Centralized management for access control system support:①Exportable access records with temperature statistics②Handling real-time Temperature alarms and tracing back records③Centralized management for multiple screening sitesCard readerPersonnel identificationTemperature measurement MinMoe TerminalDS-K1T671TM-3XF•7-inch LCD touch screen,2 Mega pixel wide-angle lens•Built-in Mifare card reading module;•Max.50,000 faces capacity , Max.50,000 cards;•Temperature range: 30-45℃, accuracy: ±0.5℃;•Supports 6 attendance status, including check in,check out, break in, break out, overtime in,overtime out•Face Recognition Duration(1:N) ≤0.2s•Authentication Distance: 0.5m ~ 1.5mMonitoringTablet (optional)MinMoe TerminalProduct DesignDouble check by mercury thermometer, ear thermometer etc.Normal temperature Abnormal temperatureCard readerPersonnel identificationTemperature measurementEntrance of Office Entrance of Meeting RoomEntrance of Restriction Area Application Scenarios2Product DesignHigh-risk Group Screening with High EfficiencySolution Introduction•Temperature screening of crowd with high efficiency (indoor), simultaneousTemperature screening of multiple people•The Black Body calibrator is used to improve the accuracy to ±0.3℃•Centralized managementfor CCTV with temperature recordNVRPoE SwitchThermographicBullet CameraHikCentralProfessionalBlack Body + Tripod(optional)HikCentral ProfessionalPoE switchWall Mounted BracketAI Detection•Thermal: 384 ×288, lens: 10/13/15 mm•Optical: 2688 ×1520, lens: 4/6/6 mm•Accuracy: ±0.5℃•Measurement range: 30-45℃•Working temperature: 10-35℃•AI detection to reduce false alarmsWall-mountedReal-time alarm monitoringDouble check by a mercurythermometer, ear thermometer, etc.Distance between camera and black body:5/3/3 m. Keep Black Body in the upper left/ upper right corner of the camera’s viewInstallation height: 2.5mDistance between camera and people:2.5–9 m (15 mm thermal lens);2.5–7 m(13 mm thermal lens);2-7 m (10 mm thermal lens)DS-2TD2636B-15/PDS-2TD2636B-13/PDS-2TD2637B-10/P Group Temperature Screening3Thermographic Bullet CameraBlack Body + Tripod(optional)AirportRailway Station FactoryApplication Scenarios3Product DesignTemperature Screening on PatrolAnytime, Anywhere. Just One ClickSolution Introduction1 m -2mIf abnormal•For preliminary Temperature screening by spot-checking inspectors (indoor )•Temperature screening without disturbing a person•Thermal resolution: 160 ×120;•Optical resolution: 640 ×480;•Accuracy: ±0.5℃•Measurement range: 30-45℃• 3.5” LCD touch screen•Supports Wi-Fi hotspot , automaticscreenshots of a person with Temperature & uploading to the Mobile Client (Hik-Thermal) as evidence•Supports real-time audio alarm •Operation time: 4-5 hoursDS-2TP21B-6AVF/WHik-Thermal appHandheld Thermographic cameraHotspotiVMS-4200438.5 °CDouble checkWorkshop ClassroomOffice Application Scenarios4Product DesignTemperature Screening & Mask DetectionIntuitive DemonstrationSolution Introduction•Temperature Screening: Simultaneous Temperature screening for multiple persons (indoor), contact-free•Mask Detection: Detecting whether people wear masks, and timely giving alarms on people without masks•Identity Verification & Stranger Alarm: Confirming identity, even with mask , and giving alarms on strangers•Temperature Status•Facial Recognition Results •Mask Detection•Number of People: total number, abnormal temperature, no mask, normal temperatureiDS-9616(/32)NXI-I8/X(B)(STD)(T) iDS-7716(/32)NXI-I4/(16P)/X(B)(STD)(T) iDS-6708NXI-I/8F(B)(STD)(T)Thermographic Camera DeepinMind NVRVisualized GUI & Voice Broadcast:•Special interface in DeepinMind NVR, visually displaying all kinds of information•Supporting voice broadcast upon mask and temperature status Efficient Search & Report:•Fast video search of target people, such as people with abnormal temperatures, without masks and so on;•Exporting reports with ID, skin-surface temperature and mask status5DS-2TD2617B-3/6PA DS-2TD2636B-15/P DS-2TD2636B-13/PDS-2TD2637B-10/P DS-2TD1217B-3/6PAPOE SwitchHikCentral-ProfessionalBlack Body +Tripod (optional)ThermographicCameraDeepinMind NVRCollege Industry Park Office Building Application Scenarios5Recommended for indoor scenarios, as large fluctuations of outdoor temperature will influence the temperature measurement accuracy.Thermographic bullet camera •Thermal: 160 ×120•Lens: 3 mm / 6 mm •Optical: 2688 ×1520•Optical lens: 4 mm / 8 mm •Video mode: Bi-spectrum image fusion •Accuracy: ±0.5℃(±0.3℃with black body)•Measurement range: 30-45℃•Supports audio alarms Thermographic turret camera •Thermal: 160 ×120•Lens: 3 mm / 6 mm •Optical: 2688 ×1520•Optical lens: 4 mm / 8 mm •Video mode: Bi-spectrum image fusion •Accuracy: ±0.5℃(±0.3℃with black body)•Measurement range: 30-45℃•Supports audio alarms •Temperature resolution: 0.1℃•Accuracy: ±0.1℃•Temperature stability: ±0.1℃/h •Effective emissivity: 0.97±0.02•Operating temperature: 0-30℃Handheld thermographic camera •Thermal resolution: 160 ×120 •Optical resolution: 640 ×480 •Measurement range: 30-45℃•Touch screen •Accuracy: ±0.5℃•Bi-spectrum image fusion •Supports Wi-Fi •Supports audio alarms •Automatic screenshots & uploading Thermographic bullet camera•Thermal: 384 ×288, lens: 15 mm/13 mm/10 mm •Optical: 2688 ×1520, lens: 6mm/6mm/4mm •Accuracy: ±0.5℃(±0.3℃with black body)•Measurement range: 30-45℃•Working temperature: 10-35℃•AI human detection, false alarms reduction •Simultaneous Temperature screening for multiple people (Up to 30 people)DS-2TD2617B-3/6PA DS-2TD1217B-3/6PA DS-2TD2636B-15/P DS-2TD2636B-13/P DS-2TD2637B-10/P DS-2TP21B-6AVF/WDS-2TE127-G4A Black body CalibratorMinMoe Wall-Mounting Touch-free Temperature Screening Terminal•Face identification, Temperature screening , mask detection •Voice reminder of not-wearing masks, and no-mask entrance is prohibited •Face capacity: 50,000•Temperature accuracy:±0.5℃, range: 30~45℃•Face Recognition Duration(1:N) ≤0.2s •Face Recognition Distance: 0.5m ~ 1.5m DS-K1T671TM-3XF•18 independent detection zones, LCD screen •Thermal camera resolution: 160 x 120•Temperature range: 30~45℃•Temperature accuracy: ±0.5℃ISD-SMG318LT-FMonitoring TabletDS-KC001•7“ Touch -Screen Android Indoor Station •Display resolution: 1024 * 600•Wi-Fi 802.11b/g/n •Remote Temperature screening & records checking,real time preview•Centralized data management, max to 100,000records•Abnormal temperature alarm•Remote access control & video intercom Metal detector doorDeepinMind NVR•8 channels of picture or video streaming;32-library capacity with up to 100,000face pictures in total.•16 channels of picture or 8 channelsvideo streaming; 32-library capacity withup to 100,000 face pictures in total.iDS-6708NXI-I/8F(B)(STD)(T) iDS-7716(/32)NXI-I4/(16P)/X(B)(STD)(T) iDS-9616(/32)NXI-I8/X(B)(STD)(T)POE switch •L2, Unmanaged, 10/100M RJ45 PoE ports, 1 10/100M RJ45 uplink port, 802.3af/at, PoE power budget. 300m long distance transmission, 6KV surge protection DS-3E0105P-E(B)DS-3E0109P-E(C)DS-D5024FNDS-D5032QE DS-D5043QE Monitor•1080P , HDMI/VGA input, plastic casing, VESA, basebracket included, 7*24h (23.8”)(31.5”)(43”)DS-D5024FC DS-D5032FC-A (23.8”)(31.5”)•1080P , HDMI/VGA input, build-in speaker,plastic casing, VESA, base bracket included, 7*24h DS-D5043UC (43”)HikCentral Professional•Flexible, scalable, reliable and powerful central surveillance system.•Supports live view, play back, access control, alarm management, personnel identification, temperature data storage, abnormal temperature trend analysis etc.Management of Registered Identities Management of Unregistered IdentitiesPersonnel Access Management & Skin-temperature Measurement•HikCentral links personnel skin-temperature and corresponding identity;•Access status and temperature live display / recording on HikCentral;•Administrators can grant the access remotelyAbnormal Status Management •Detected abnormal temperature from multiple sites will be centralized into HikCentral anddisplayed on GIS map / E-map;•Batch attendance handling of people in quarantine Abnormal Status Registration•Once abnormal temperature appears, inspectors can type in the identity information and register it to HikCentral;•All registrations are traceable, and can be easily searched and exported;•Visualized statistic report helps administrators to assign and adjust manpower;ThanksSee far, go further****************************。
介绍中国传统文化的讲座时间地点英语作文Lecture on Traditional Chinese CultureChina, as one of the oldest civilizations in the world, boasts a rich and diverse traditional culture that has left an indelible mark on both its past and present. To shedlight on this fascinating aspect of Chinese heritage, weare pleased to announce a lecture on traditional Chinese culture. The lecture aims to provide participants with an insight into various aspects of China's vibrant cultural traditions.Date:The lecture will take place on [date] at [time]. It is scheduled to last for approximately two hours, allowing ample time for an extensive exploration of different topics.Venue:The lecture will be held at [venue], conveniently locatedin the heart of the city. The venue is easily accessible bypublic transportation, ensuring convenience for all attendees.Content:During the lecture, renowned scholars and experts in traditional Chinese culture will deliver insightful presentations on a range of topics. The audience can expect to gain knowledge about ancient philosophy, traditionalarts such as calligraphy and painting, literature, music, architecture, and more.The speakers will delve into the historical context and significance behind these cultural elements while highlighting their enduring influence on modern society. Furthermore, they will explore how these traditions have been preserved over centuries and continue to shape contemporary Chinese identity.Language support:To ensure inclusivity and accessibility for English-speaking participants, simultaneous translation services will be available throughout the entire lecture. This way,everyone can fully engage with the content presented by our esteemed panel of speakers.Registration:In order to attend this enlightening event, registration in advance is required. Interested individuals can sign up online through our official website or by contacting our designated phone number/email address. Limited seats are available due to high demand; therefore, it is advisable to secure your spot early.Conclusion:Don't miss out on this unique opportunity to immerse yourself in China's captivating traditional culture through our comprehensive lecture series. Join us on [date] at [time] at [venue], and embark on a journey to discover the ancient wisdom and artistic brilliance that have shaped Chinese civilization for millennia.中国传统文化讲座作为世界上最古老的文明之一,中国拥有丰富多样的传统文化,这些文化传统在历史上和现代社会都留下了深刻的印记。