机械手臂的结构设计共35页
- 格式:ppt
- 大小:2.37 MB
- 文档页数:35
机械手臂构造上主要由连杆与关节组成,而机器手臂的关节与人类的关节类似,它连接了两个相邻的连杆,并提供两个相邻的连杆产生相对运动。
不同的关节型态可以让两个相邻连杆做出不同型态的相对运动。
机器手臂常使用的关节型态有五种,其中三种为转动关节,另外两种为直动关节,以下介绍五种常用的关节型态。
1.回转关节:输入连杆与输出连杆之间的相对运动为旋转运动,其旋转轴垂直于两连杆。
2.扭转关节:输入连杆与输出连杆的相对运动为旋转运动,但两连杆与旋转轴平行。
3.旋转关节:连杆之间的相对运动为旋转运动,其输入连杆平行于旋转轴,而输出连杆连杆垂直于旋转轴。
4.线性关节:输入与输出连杆间的相对运动为直线运动,且两连杆与轴必须平行。
5.正交关节:连杆之间的相对运动为直线运动,但输入连杆与输出连杆必须相互垂直。
位置控制是一般工业型机器手臂最常使用的控制方式,工业型机器手臂最常需要应付的是快速、重复的动作,可大幅提升作业的效率,达到节省成本的目的。
首先设定终端效果器的位置与姿势,接着使用反向运动学求出各关节的位置,并规划关节旋转的轨迹。
接下来将关节需旋转的角度换算成马达转动的步数,利用运动控制卡依照规划的轨迹将脉波传送至马达驱动器。
最后控制马达带动各关节使终端效果器到达期望的位置与姿势。
机械手臂结构设计引言机械手臂是一种能够模拟人体手臂运动的机械装置,由多个关节和执行器组成。
机械手臂广泛应用于工业生产、医疗卫生、军事领域等多个领域。
在设计机械手臂的过程中,结构设计是至关重要的。
本文将介绍机械手臂的结构设计,包括材料选型、关节设计以及执行器设计等方面。
材料选型机械手臂的结构设计中,材料的选型是一个关键的考虑因素。
常用的材料包括金属、塑料和复合材料等。
对于机械手臂的关键部件,如关节和机械臂的骨架,通常选择高强度的金属材料,如铝合金或钢材。
这些材料具有良好的刚性和抗压能力,能够承受机械手臂在工作过程中的变形和载荷。
对于机械手臂的其他部件,如外壳和手部抓取装置,通常采用轻质的塑料材料。
塑料具有良好的韧性和耐磨性,能够减少机械手臂的自重,提高其运动效率。
此外,一些先进的机械手臂采用复合材料作为结构材料。
复合材料由两种或多种材料的组合而成,具有重量轻、强度高和耐腐蚀等优点。
复合材料在机械手臂的设计中能够提供更多的设计自由度,并且具有良好的机械性能。
关节设计机械手臂的关节设计是结构设计的核心部分。
关节是机械手臂的运动部件,具有转动和固定两种类型。
根据机械手臂的需要和设计要求,可以选择不同类型的关节。
常见的关节类型包括旋转关节、滑动关节和万向关节。
旋转关节允许机械手臂在水平和垂直方向上旋转,以实现多个角度的运动。
滑动关节允许机械手臂在水平方向上滑动,实现平移运动。
万向关节能够实现多个方向上的转动和滑动运动。
关节的设计要考虑到机械手臂的运动需求、载荷和精度要求。
需要确定关节的旋转角度范围、最大载荷和运动速度等参数。
在选择关节类型和设计参数时,需要综合考虑机械手臂的整体性能和成本等因素。
执行器设计执行器是机械手臂的驱动装置,用于控制机械手臂的运动。
常见的执行器类型包括电动执行器和液压执行器。
电动执行器是一种常用的执行器类型,具有结构简单、控制灵活和响应速度快等优点。
电动执行器通常采用电机作为动力源,通过齿轮传动或直接驱动实现机械手臂的运动。
机械手臂结构设计机械手臂是一种能够模拟人的手臂运动的装置,它由一系列的关节和链接组成,能够自由灵活地移动和操纵。
机械手臂结构设计是机械手臂设计的重要环节,决定了机械手臂的性能和应用领域。
机械手臂的结构设计需要考虑以下几个方面:机械手臂所需具备的运动自由度、负载能力、精度要求、工作范围、工作环境等。
根据具体的应用需求,可以选择不同的机械手臂结构。
目前,常见的机械手臂结构有以下几种:1.串联结构:串联结构是由多个关节和链接按照线性排列连接而成的机械手臂。
它可以实现较大范围的运动,但灵活性相对较差。
这种结构适合需要较大工作范围和负载能力的应用,如搬运、装配等。
2.并联结构:并联结构是由多个平行的关节和链接组成的机械手臂。
它可以实现高速度和高精度的运动,同时具备较大的负载能力。
这种结构适合需要高精度和高灵活性的应用,如焊接、喷涂等。
3.混合结构:混合结构是串联结构和并联结构的结合,既具备串联结构的工作范围和负载能力,又具备并联结构的高速度和高精度。
这种结构适合需要同时兼顾工作范围、负载能力、速度和精度的应用,如装配线、包装等。
在机械手臂结构设计过程中,需要注意以下几个关键因素。
1.关节和链接的选择:关节和链接是机械手臂的基本组成部分,它们的选择直接影响着机械手臂的运动能力和负载能力。
对于需要较大力矩和负载能力的应用,应选择高强度和耐磨损的关节和链接。
2.驱动方式的选择:机械手臂的驱动方式有液压驱动、电动驱动和气动驱动等。
不同的驱动方式具有不同的特点和适用范围,需要根据具体应用需求选择合适的驱动方式。
3.运动控制系统的设计:机械手臂的运动控制系统是保证机械手臂按照预定轨迹和速度运动的关键。
运动控制系统的设计应考虑到运动精度和稳定性的要求,可以采用传感器、编码器、电机控制器等设备实现对机械手臂的精确控制。
4.安全设计:机械手臂通常用于危险的工作环境,因此安全设计是非常重要的。
安全设计应包括安全传感器、急停按钮、防护罩等安全设备,以确保人员和设备的安全。
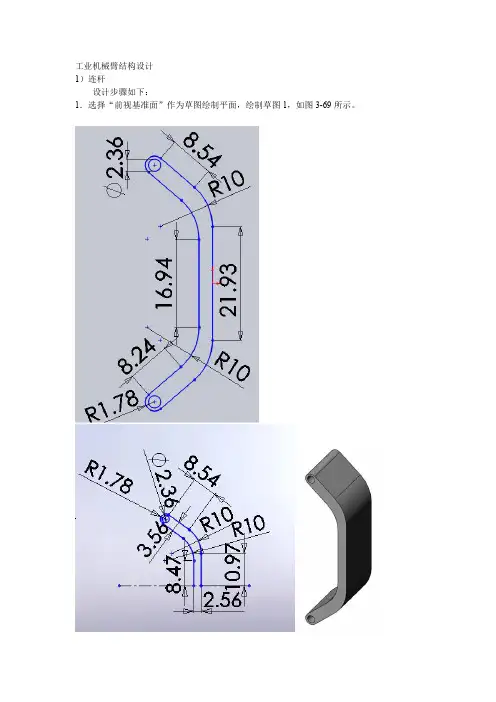
工业机械臂结构设计1)连杆设计步骤如下:1.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入:终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型1。
3.选择“右视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值61mm,确定,完成实体造型2。
5.选择图示边线,点选圆角特征按钮,添加半径为5mm的圆角。
完成连杆实体造型如图所示。
2)连接件11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
3)连接件21.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
2.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值15mm,确定,完成实体造型。
3.选择“上视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
4.点选切除-拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值12mm,确定,完成实体造型2。
5.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
6.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
7.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
8.点选拉伸特征图标,在属性管理器中输入终止条件:两侧对称,拉伸高度值12mm,确定,完成实体造型。
9.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
10.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值40mm,确定,完成实体造型3。
11.选择“前视基准面”作为草图绘制平面,绘制草图1,如图3-69所示。
12.点选切除-拉伸特征图标,在属性管理器中输入拉伸高度值20mm,确定,完成实体造型3。
13.选择图示表面作为草图绘制平面,绘制草图1,如图3-69所示。
14.点选拉伸特征图标,在属性管理器中输入终止条件:给定深度,拉伸高度值5mm,确定,完成实体造型。