基于DSP和CAN总线的步进电机控制系统研究
- 格式:pdf
- 大小:605.50 KB
- 文档页数:4


基于DSP的电机控制方法研究的开题报告一、选题背景及意义随着科技快速发展,各种新型电机应运而生。
而控制电机的方法和技术也得到了不断的升级和创新。
基于DSP的电机控制方法就是其中之一,它能够为电机提供更加准确和高效的控制,从而使电机在工作过程中得到充分利用和发挥。
同时,随着全球节能减排的大趋势,将减小电机运行时的损耗和污染成为制造业设备更新的方向。
基于DSP的电机控制方法可以优化电机的运行效率,减少能耗和排放,也有助于实现制造业设备的可持续发展。
因此,本论文旨在研究基于DSP的电机控制方法及其在电机控制中的应用,加深对该方法的认识和理解,为实现电机的高效控制和可持续发展提供技术服务。
二、研究方法和论文结构本论文将采用以下研究方法:1.文献综述法:对基于DSP的电机控制方法进行归纳和总结,从国内外相应领域获取相关的领先技术和理论研究,了解相关领域的研究现状,为本研究提供一定的理论支持。
2.实验方法:进行实验,测试基于DSP的电机控制方法的性能,并与其他控制方法进行比较。
根据实验结果对该方法进行评估和优化,提高电机的控制效率。
3.案例分析法:研究基于DSP的电机控制方法在电机控制领域的应用案例,分析其在实际工业生产中的应用效果,以此进一步验证和优化该方法的可行性。
论文结构如下:第一章:绪论介绍本研究的背景和意义,研究方法和论文结构。
第二章:基于DSP的电机控制方法的理论基础介绍基于DSP的电机控制方法的基础理论,包括硬件架构和算法设计等。
第三章:基于DSP的电机控制方法的实验研究该部分将介绍基于DSP的电机控制的实验研究,包括实验设计、实验流程、实验数据采集和处理等。
第四章:基于DSP的电机控制方法在电机控制中的应用介绍基于DSP的电机控制方法在电机控制领域的应用案例,分析其在实际工业生产中的应用效果和经济效益。
第五章:基于DSP的电机控制方法的优化研究本章将对基于DSP的电机控制方法进行优化研究,提高其控制效率和电机的使用寿命。

基于DSPIC芯片和CAN总线的控制模块研发与设计一、项目背景随着现代汽车电子化的发展和智能汽车的崛起,控制模块的研发与设计变得愈发重要。
基于DSPIC芯片和CAN总线的控制模块可以实现高性能、高效能的控制和通信功能,因此成为了目前控制模块设计的主要方向之一二、技术原理1.DSPIC芯片DSPIC芯片是一种专门用于数字信号处理的微控制器,具有高性能、高灵活性和低功耗的特点。
它集成了DSP和微控制器的功能,在计算能力和处理速度方面有着明显优势。
2.CAN总线CAN(Controller Area Network)总线是一种广泛应用于汽车电子系统中的通信协议,它可以实现各个控制模块之间的高速数据传输和通信。
CAN总线具有较强的抗干扰能力,可靠性高,并且支持多主机和多设备的连接。
三、硬件设计1.DSPIC芯片选型根据具体需求,选择合适的DSPIC芯片,考虑计算能力、存储容量、功耗等因素。
2.CAN总线接口电路设计设计CAN总线接口电路,包括电气层和协议层。
电气层需要设计CAN收发器和电平转换电路,确保CAN总线与DSPIC芯片之间的电气兼容性;协议层需要实现CAN总线的数据通信和控制逻辑。
3.外围电路设计根据实际需要添加外围电路,如时钟电路、稳压电路、输入输出接口、扩展接口等。
四、软件设计1.DSPIC芯片固件开发使用C语言或汇编语言等进行DSPIC芯片的固件开发,包括初始化设置、各种算法实现和控制逻辑编写。
2.CAN总线协议栈开发设计CAN总线协议栈,实现CAN数据通信和控制逻辑,包括消息的发送和接收、错误处理、帧过滤等功能。
3.软硬件接口驱动开发根据硬件设计的接口,编写驱动程序,并提供统一的API接口,方便上层应用程序调用。
五、测试与验证1.单元测试对芯片固件、CAN协议栈和硬件接口驱动进行单元测试,验证其功能正确性。
2.集成测试将各个模块集成到一起进行测试,验证整个控制模块的性能和稳定性。
3.系统测试将控制模块连接到实际系统中进行测试,验证其在实际环境下的可靠性和适应性。

基于DSP的步进电机控制一DSP简介DSP,即Digital Signal Processor数字信号处理器,它是以数字信号来处理大量信息的器件,强大数据处理能力和高运行速度。
其工作原理是接收模拟信号,转换为0或1的数字信号。
再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。
它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。
图1 TMS 320LF2407引脚图DSP在选型时主要考虑处理速度、功耗、程序存储器和数据存储器的容量、片内资源,如定时器的数量、I/O口数量、中断数量、DMA通道数等。
其主要供应厂商为TI、Motorola、Freescale等。
二.步进电机简介步进电机是将电脉冲信号转变为角位移或线位移进电机的转速或位置信号反馈给控制器DSP,从而实现转速或位置的闭环控制。
然后将转速或位置在液晶上显示,利用看门狗复位电路监控程序是否正常运行。
因为DSP本身使用工作电压和锁相环工作电压,故在系统使用外围电源电路提供5V电压时须转换成。
步进电机驱动电路由DSP产生的PWM信号不足以直接驱动电机运行,需要使用驱动电路,可使用集成芯片L298N,它是恒压恒流双H桥电机芯片,可同时控制两台直流电机,输出电流可达2A。
使用时应使用供电电压VS大于其逻辑电压VSS,否则将会出现电机失控的现象。
另外,为了保护电机,在驱动电路中需要加入两组续流二极管。
为了降低和减小驱动电路对控制系统的影响,可加入光耦器件。
DSP产生的PWM波经施密特反相器74HC14后加到TLP521-4光耦上进行光电隔离,再送给驱动芯片L298N.这样控制信号就变得稳定可靠了。
光电编码器的选择光电编码器的选择,可以选择增量式编码器或绝对值编码器,前者适用于速度检测,后者适用于位置检测。
编码器的A、B信号与正交解码脉冲单元QEP 相对应的引脚连接,可以检测出步进电机的速度(位置),并且能够判断出步进电机的旋转方向。

基于DSP的电机控制技术研究近年来随着现代电子技术的不断进步和应用领域的不断扩大,基于DSP的电机控制技术在各个行业中得到了广泛的应用。
作为一种高效、精确、可靠的电机控制技术,基于DSP的电机控制技术正在成为电机控制技术的主流趋势。
一、基于DSP的电机控制技术的发展历程基于DSP的电机控制技术是在数字信号处理技术的基础上发展出来的。
随着数字信号处理技术的不断发展,基于DSP的电机控制技术也跟随着不断发展壮大。
初期的电机控制技术主要采用模拟控制技术,最早开始应用的是PID控制技术。
然而由于模拟控制技术的缺陷,如控制精度低、鲁棒性较差等,这些缺陷给电机控制技术的发展带来了困难。
随着数字信号处理技术的不断发展,基于DSP的电机控制技术开始逐渐取代模拟控制技术,成为了电机控制技术的新趋势。
二、基于DSP的电机控制技术的工作原理基于DSP的电机控制技术的工作原理大致分为以下几个步骤:1. 传感器测量电机的实时状态信息:通过加速度计、编码器等传感器来获取电机的实时状态信息。
2. 采集数据并进行预处理:DSP芯片通过采用高速AD转换器来采集传感器测量的实时数据,然后对数据进行预处理,例如滤波、补偿等。
3. 通过控制算法实现电机控制:在电机控制方面,最常用的是PID控制算法和变频调速算法。
DSP芯片从采集的数据中提取电机的状态信息,然后使用控制算法来计算控制信号,再通过输出模块将控制信号发给电机。
4. 前馈控制和自适应控制:在实际控制中,为了更好地控制电机,可以引入前馈控制和自适应控制技术,以提高控制精度和响应速度。
三、基于DSP的电机控制技术的优点基于DSP的电机控制技术有以下几个优点:1. 精度高:基于DSP的电机控制技术通过数字方式来控制电机,精度高,控制精确。
2. 可靠性高:基于DSP的电机控制技术具有很高的可靠性,因为DSP芯片集成了多种保护机制,并且能够进行故障自诊断和保护。
3. 变频控制方便:通过基于DSP的变频技术可以实现电机的无级变速控制,可以满足各种工艺要求。
基于DSP的电机控制系统的研究基于DSP的电机控制系统的研究电机在现代工业中扮演着重要的角色,广泛应用于各个领域,如机械制造、交通运输、能源和工艺控制等。
为了提高电机的性能并满足不同应用的需求,研究者们不断探索新的控制技术和方法。
其中,基于数字信号处理器(DSP)的电机控制系统成为近年来的研究热点之一。
本文旨在介绍基于DSP的电机控制系统的研究进展,并探讨其优势和挑战。
1. 研究背景随着科技的不断进步,传统的电机控制方式已经无法满足现代工业的要求。
传统的电机控制系统一般采用模拟电路和微控制器实现,这种方式存在着精度低、可调性差、响应时间长等问题。
而DSP作为一种高性能的数字信号处理器,具有运算速度快、运算精度高、可编程性强等优点,能够更好地满足电机控制系统的需求。
2. 流程及原理基于DSP的电机控制系统一般由三个主要部分组成:输入输出模块、控制算法和功率驱动模块。
其中输入输出模块用于读取电机的状态信息,如电流、速度和位置等;控制算法通过对输入输出模块采集的数据进行处理,确定控制策略;功率驱动模块负责将控制信号转换为行动,并驱动电机的转动。
3. 研究进展基于DSP的电机控制系统的研究在控制算法、硬件设计和实时性等方面取得了许多进展。
在控制算法方面,PID控制、自适应控制和模糊控制等方法被广泛应用于电机控制系统中,以提高系统的控制精度和稳定性。
在硬件设计方面,研究者们提出了多种具有高性能的DSP芯片和电路设计方案,以满足电机控制系统的需求。
在实时性方面,通过优化控制算法和硬件设计,使得基于DSP的电机控制系统能够实现高带宽和低时延的控制。
4. 优势与挑战基于DSP的电机控制系统相比传统的控制方式具有许多优势。
首先,DSP能够实现更高的控制精度和稳定性,提高系统的性能表现。
其次,DSP的可编程性使得控制算法更加灵活,能够适应不同的工况和应用场景。
此外,基于DSP的电机控制系统还具有节能、体积小、可靠性高等优势。
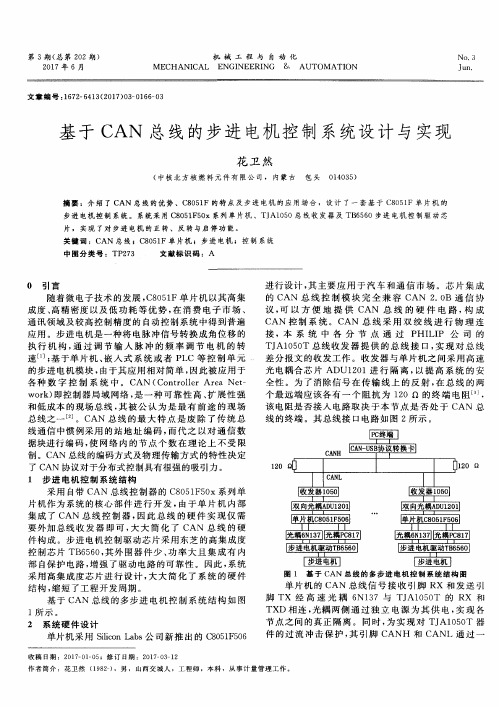
收稿日期:20000714 驱动控制 基于DSP 的步进电机控制系统设计李为民,邢晓正,胡红专,邓伟平(中国科学技术大学,合肥230027)Design of Control System of Stepper Motor B ased on DSPL I Wei -m i n ,X IN G Xiao -z heng ,HU Hong -z huan ,D EN G Wei -pi ng(University of Science and Technology of China ,Hefei 230027,China ) 摘 要:介绍了DSP 技术在步进电机控制系统中应用。
由DSP 微处理器构成步进电机的智能控制器,DSP 的数据端口构成步进电机的智能脉冲分配器,由定时器中断产生激励脉冲。
文章提出了基于单片ADSP -2181处理器的多目标步进电机脉冲扫描控制原理,每4个电机组成一个控制单元,控制单元分配一个地址序号,由DSP 处理器扫描其I/O 空间的控制单元驱动步进电机。
关键词:步进电机;控制系统;DSP 中图分类号:TM383 文献标识码:A 文章编号:1004-7018(2001)03-0027-02Abstract :This paper puts forward the application of DSP in the control system of stepper motor.Single DSP constitutes the intelligent controller of stepper motor.The data port of DSP forms the intelligent pulse distributor of stepper motor ,and the control system creates drive pulse of stepper motors by the timer of DSP.The paper also presents the control principle of pulse scanning method of multi -object stepper motors based on single ADSP -2181.Each control unit controls four stepper motors ,and has one I/O port address number of DSP.DSP drives stepper motors by scanning the I/O port address of each unit.K eyw ords :stepper motor ;control system ;DSP1引 言由于超大规模集成电路技术的迅速发展,DSP (Digital signal processor 数字信号处理器)的性能价格比得到很大提高,使得DSP 在电机控制领域的应用愈来愈广泛。
嵌入式技术 电 子 测 量 技 术EL ECT RO NIC M EA SU REM EN T T ECHN O LO GY 第32卷第1期2009年1月基于DSP和CAN总线的步进电机控制系统研究王 瑾(陕西纺织服装职业技术学院 咸阳 712000)摘 要:为了提高步进电机控制系统的动态性能和控制精度,提出基于数字信号处理器T M S320L F2407A的步进电机控制系统设计方法,包括系统硬件、软件及加减速控制算法的设计;并运用CAN总线技术实现了DSP与工控机之间的数据通信。
通过实验测试,结果验证了步进电机加减速控制算法的正确性和有效性。
关键词:步进电机;数字信号处理器;CA N总线;加减速控制中图分类号:T P273 文献标识码:AStudy on stepping motor control system based on DSP and CAN busWang Jin(Shaanx i T ex tile an d Garment Institute,Xian yang712000)Abstract:In order to impro ve dynamic perfor mance and contro l pr ecision o f stepping moto r co nt ro l sy stem,this paper br ings fo rw ard stepping moto r co ntr ol system design based o n T M S320L F2407A DSP,including hardwar e design, so ftwar e desig n and contro l alg or ithm desig n of acceleration and deceler at ion.Data co mmunicatio n between DSP and indust rial computer is achiev ed by the use of CA N bus.T hro ug h ex per imental test,t he results pro ve that contro l a lg orithm of acceleration and deceleratio n is co rr ect and eff ective.Keywords:stepping mo tor;DSP;CA N bus;contro l o f acceleratio n and deceler ation0 引 言步进电机是一种将电脉冲信号转换成角位移的执行机构,其转子角位移与输入脉冲的个数成正比,其转动速度与输入脉冲的频率成正比,通过改变脉冲频率可以实现大范围内的调速;同时,步进电机易于与计算机和其它数字元件接口,因此被应用于各种数字控制系统中[1]。
随着微电子技术的发展,数字信号处理器以其强大的运算处理功能、较高的控制精度而在自动控制系统中普遍使用。
在众多DS P型号中,T MS320LF2407A作为TI公司的一款新型16位定点数字信号处理器,以其外设集成度高、A/D转换速度快等特点,而被广泛用于电机数字化控制。
为了提高步进电机的控制性能和精度,本文以TM S320LF2407A为核心,实现了三相步进电机控制系统的设计;并运用CAN总线技术,完成了上位机与步进电机控制系统之间的数据通信。
1 系统结构基于DSP和CAN总线的步进电机控制系统结构框图如图1所示。
整个系统主要由数字信号处理器、CAN总线及其接口电路、工控机、步进电机等部分组成。
本系统上位机经CAN接口适配卡与总线相连,实现对下位机的监控和管理。
下位机选用T MS320LF2407A,通过CAN驱动器PCA82C250连接至CAN物理总线[2]; DSP用于接收上位机指令,实现对步进电机的控制及向上位机发送电机运行状态和各种参数。
在此网络系统中,可配置多个节点,各节点之间都能通过CAN总线交换信息。
图1 系统结构框图王瑾等:基于DSP 和CAN 总线的步进电机控制系统研究第1期2 系统硬件设计2.1 DSP 与C AN 总线接口电路DSP 与CAN 总线接口电路主要用于完成工控机与步进电机控制系统的数据通信,电路如图2所示。
图2 DSP 与CA N 总线接口电路电路选用PCA82C250作为CAN 控制器和CA N 总线间的接口,提供对总线的差动发送和接收能力。
为提高系统抗干扰性能,在DSP 与PCA82C250之间增加了光电隔离电路,隔离采用高速光耦6N137,其最高响应频率可达10M H z 。
电路中,PCA 82C250的输出引脚CANH 和C ANL 之间必须并联120 终端匹配电阻;否则,会降低总线数据通信的可靠性[3]。
并将RS 引脚接地,使PCA82C250工作于高速通信方式。
2.2 脉冲分配器电路步进电机输出接口电路包括脉冲分配器电路和功率驱动电路2部分。
脉冲分配器根据指令将脉冲按一定逻辑关系加到各相绕组的功率放大器上,使步进电机按一定方式运行[4]。
系统采用专为三相步进电机脉冲控制而设计的接口芯片C H 250作为脉冲分配器,电路如图3所示。
图3 脉冲分配器电路图中CH250接成三相六拍工作方式,TM S320LF2407A的PWM1、T1PWM 脚分别与CH 250的J6r 、CP 端相连。
PWM1脚的电平高、低控制步进电机的旋转方向;T1PWM 脚输出脉冲的个数决定步进电机旋转角度;其输出脉冲的频率控制电机的加、减速运动。
2.3 功率驱动电路脉冲分配器CH 250的A 、B 、C 三端输出电流很小,为200~400 A ;而所用三相反应式步进电机驱动电流较大,每相静态电流约3A 。
为满足驱动要求,系统设计了步进电机功率驱动电路,如图4所示(以A 相为例)。
电路采用三级晶体管放大,第1级用3DG6小功率管,第2级用3DK4中功率管,第3级用3DD15大功率管。
LA 为步进电机A 相绕组。
R15为限流电阻,保证电流稳态值为额定值;D2为续流二极管,防止3DD15关断时绕组反电势击穿管子。
C9为加速电容,动态工作时,利用其旁路作用,使电机绕组电流上升加快,来改善电流波形的前沿,提高电机高频性能[5]。
图4 步进电机功率驱动电路3 系统软件设计步进电机存在启动时的失步、停止时的过冲现象,这是影响步进电机位置控制精度的主要原因。
因此,软件设计主要介绍步进电机加减速控制算法及程序实现。
3.1加减速控制算法设计在位置控制时,对步进电机的加减速有严格要求,就是在不失步和过冲的前提下,用最短的时间移动到指定位置[6]。
为满足加减速控制要求,本系统步进电机按照指数加减速曲线进行控制,如图5所示。
图5 指数加减速曲线第32卷电 子 测 量 技 术系统按指数曲线加减速时,驱动脉冲的频率f 与升速时间t 的关系如下[7]:f t =f m -f m e -t/ (1)式中:f m 为步进电机最高运行频率; 是决定升速快慢的时间常数,实际工作中可由实验来确定。
实际运行中,若步进电机运行频率为f g,由式(1)可算出升速时间为:t r = ln f m -ln f m -fg (2)由于DSP 是用定时器比较中断方式来控制步进电机速度的,电机的加减速控制实际上是不断地改变定时器周期寄存器的装载值。
为了编程方便,可用阶梯曲线来拟合加速曲线,将升速段按照速度等间距均匀地离散为n 档,如图6所示。
图6 指数加速曲线离散化若步进电机启动脉冲频率为f g ,稳定运行最高频率为f c ,则相邻两速度级的频率变化为:!f =(f c -f q )/n (3)则每一档频率f k 为:f k =f q +!f k -1(k =1,2, ,n )每一档运行时间Tk 为:T k =t r f k+1-t r f k (k =1,2, ,n )式中:t r f k 、t r f k +1分别为运行频率为f k 及f k +1时的升速时间。
各分档速度内运行步数N k 为:N k =f k T k (4)则加速过程总步数N r 为:N r =!nk =1Nk(5)执行加速控制时,对每档速度都要计算在此台阶上应走步数,然后以递减方式查询。
当减至0时,表明该速度档步数已走完,进入下一档速度。
同时,递减加速过程总步数,直到加速过程走完。
以上就是对步进电机加速过程的处理方法,减速过程的处理同加速过程。
3.2 加减速控制程序实现采用指数加减速曲线控制步进电机运行时,需要通过计算来获得PWM 输出频率;为提高程序执行效率,系统采用图6所示近似指数加速曲线[8]。
即用速度级数M 与1个常数C 的乘积来模拟在该速度级上保持的时间,并且保持时间用步数来代替;因此,在每个速度级上,步进电机都要走MC 步。
本系统步进电机工作时,启动频率为400H z,最高频率3200H z;取电机速度级数M =7,常数C=2。
当外部时钟频率为10M H z,经DS P 内部锁相环4倍频,且通用定时器1的预分频因子为64时,可求出各速度级上PWM 信号频率所对应的定时器1周期寄存器值T 1PR,如表1所示。
程序运行时,可通过查表来改变T 1PR 的装载值,控制输出PWM 信号的频率;这样可以大幅减少占用CPU 的时间,提高系统响应速度。
表1 加速时各级频率及T1PR 值对照表速度级数M 频率/H z 每级脉冲个数周期寄存器T 1PR 值速度级数M 频率/H z 每级脉冲个数周期寄存器T 1P R 值1400261A H 5200010138H 2800430DH 6240012104H 312006208H 72800140DF H416008186H程序设计时,将加减速控制程序放在DSP 定时器1的比较中断服务子程序中。
每当比较中断发生时调用1次该程序,也即步进电机每走一步调用1次;并按照加减速控制要求经查表装入T1PR 值,在紧接着的下1个周期中相应地控制步进电机运动速度。
加减速控制程序流程图如图7所示。
图7 加减速控制程序流程图4 实验结果在实验过程中,系统选用三相反应式步进电机70BF003,其额定激励电压27V,每相静态电流3A ,步距角∀=1.5∀,最大静转矩0.784N m 。
系统工作时,使步王瑾等:基于DSP 和CAN 总线的步进电机控制系统研究第1期进电机启动频率为400H z,最高工作频率3200H z,取速度级数M=7,常数C=2,分别用示波器对步进电机加、减速过程中TM S320LF2407A 的T 1PWM 引脚输出信号频率进行检测,其波形如图8所示。
图8 实验结果由图可知,步进电机在进行速度控制时,DSP 的T1PWM 引脚输出频率可变的PWM 信号;且步进电机速度并非一直上升(或下降),而是每升1级(或每降1级)都要在该速度级上保持一段时间,即实际加、减速轨迹呈阶梯状,并在速度级上按2、4、6、 等步数变化;同时,输出波形最低频率400H z,最高频率3200H z 。