北斗-GPS模块数据格式定义-科愗20141231
- 格式:doc
- 大小:61.00 KB
- 文档页数:2

北斗/全球卫星导航系统(GNSS )接收机导航定位数据输出格式Navigation and positioning data output format forBeiDou/Global Navigation Satellite System(GNSS) receiver2015-10-19 发布 2015-11-01 实施BD 410004—2015BD 410004—2015目 次前言...................................................................................................................................................................... I I 引言.. (III)1 范围 (1)2 规范性引用文件 (1)3 术语和定义、缩略语 (1)3.1 术语和定义 (1)3.2 缩略语 (2)4 要求 (2)4.1 数据传输格式 (2)4.2 数据格式 (3)4.3 数据内容 (16)4.4 通用语句格式 (19)附录A(规范性附录) GNSS标识符 (41)参考文献 (42)BD 410004—2015前言为适应我国北斗卫星导航发展对标准的需要,全国北斗卫星导航标准化技术委员会组织制定“北斗专项标准”,推荐有关方面参考采用。
本标准由中国卫星导航系统管理办公室提出。
本标准由全国北斗卫星导航标准化技术委员会归口。
本标准起草单位:清华大学,北京安华北斗信息技术有限公司,中国卫星导航工程中心,中国航天标准化研究所。
本标准主要起草人:崔晓伟,陆明泉,张嘉怡,李冬航,李洪,姚铮,吴海玲,李作虎,周玉霞。
BD 410004—2015引 言随着卫星导航技术的发展,全球卫星导航系统建设以及服务性能不断改善,GNSS兼容接收机的应用范围也越来越广。
保定市贝尔电子有限公司产品说明书Q/BEH001-2013 北斗/GPS定位通信终端保定市贝尔电子有限公司声明本说明书可能包含技术上不准确的地方或印刷错误。
本说明书的内容将做不定期的更新,恕不另行通知;更新的内容将会在本说明书的新版本中加入。
我们随时会改进或更新本说明书中描述的产品或程序。
若存在说明书中对产品的描述与实物不符,一律以实物为准。
警告●将北斗/GPS定位通信终端放置在足够通风的空间。
●使北斗/GPS定位通信终端工作在技术指标允许的温度及湿度范围内,请不要在北斗/GPS定位通信终端放置盛液体的容器,比如花瓶等。
●设备电路板上的灰尘在受潮后会引起短路,在安装设备时,请尽量做好防尘、防潮工作。
●请选择SD卡生产厂商推荐的、适合设备工作要求的SD卡,以满足长时间、大数据量的读写要求,同时请从正式渠道购买,以保证SD卡的品质。
●禁止带电打开机盖;禁止带电插拔外设接口。
目录北斗/GPS定位通信终端 (1)声明 (2)警告 ...................................................................................................................错误!未定义书签。
概述 .. (4)1.1用途 (4)1.2型号及其含义 (4)1.3使用环境 (4)1.4技术特点 (5)1.5 产品主要功能 (5)1.5.1压缩处理功能 (5)1.5.2录像 (6)1.5.3预览与回放 (6)1.5.4报警 (6)1.5.5用户 (6)1.5.6网络功能 (7)二、技术指标 (7)三、安装指南 (8)3.1 清点设备及其附件 (8)3.2 硬件接口连接说明 (8)3.2.1前面板连接说明 (8)3.2.2后面板连接说明 (9)3.3 J1、J2引脚定义说明 (9)3.3.1 J1引脚定义说明 (9)3.3.2 J2引脚接口说明 (11)四、安装使用及维护 (11)4.1安装SD 卡和SIM/UIM 卡 (11)重要提示: (11)4.2安装SD 卡 (12)4.3安装SIM/UIM卡 (12)4.4 ACC启动控制连接说明 (13)4.5 ACC 接口与汽车点火开关相连 (13)4.6设备接口及插接设备维护 (13)五、安装 (14)概述1.1用途北斗/GPS定位通信终端是一款专门应用于各种移动视频音频监控领域的数字监控产品,具备本地录像存储(SD卡)、无线网络传输*、北斗/GPS 定位*、行车信息记录、语音监听或对讲*、报警触发等多项功能,性能完善且稳定;该设备外壳采用铝合金材料整体拉伸而成,并根据内部热耗分布特点在结构上进行巧妙设计,使设备在防尘、散热、防水、防锈蚀等方面达到完美融合;同时根据车载或其他移动监控的需求,该设备体积小、功耗低,便于安装并节省能耗。
GPS/北斗定位模块说明书GPS/北斗定位模块使用说明书V2.4济南智泽贸易有限公司目录1.产品介绍 (1)1.1.产品概述 (1)1.2.产品特点 (1)1.3.技术指标 (1)1.4.产品尺寸 (1)1.5.硬件接口 (2)2.通信协议 (3)2.1.通信协议 (3)2.2.寄存器定义 (4)3.协议详解 (6)3.1.读保持寄存器 (6)3.2.读取版本号 (6)3.3.读取设备地址 (7)3.4.读取设备波特率 (7)3.5.读取奇偶校验位 (7)3.6.读取定位数据(RMC) (8)3.7.定位数据(RMC)解析 (8)3.8.修改设备地址(广播) (9)3.9.修改波特率 (9)3.10.修改奇偶校验位 (9)4.保修期限 (10)5.技术支持 (10)6.联系方式 (10)7.免责声明 (10)1.产品介绍1.1.产品概述GPS/北斗定位模块,是一款具有GPS定位和北斗定位的双模定位终端,可以快速、精确定位位置。
定位模块内含双模定位芯片,快速定位位置,并且将定位信息以RS485接口和Modbus协议的方式提供给用户使用,串口波特率最高可达115200bps,可以通过PC机设置软件或串口命令轻松控制,使用方便快捷。
1.2.产品特点⏹同时支持GPS定位和北斗定位⏹串口波特率自定义,支持2400~115200bps⏹串口支持全双工和半双工串口通讯,支持RS485收发自动切换⏹模块串口波特率等参数可通过PC机或串口命令配置⏹RS485带TVS、过流等保护⏹提供天线状态诊断,提供天线开路、短路等状态信息1.3.技术指标环境参数⏹工作温度:-40℃~80℃⏹工作湿度:5%~95%RH,无凝露供电⏹工作电压:DC5~28V⏹功耗:≤0.3W定位精度⏹出色的定位功能,支持BDS/GPS/GLONASS卫星导航系统的单系统定位,以及任意组合的多系统联合定位⏹冷启动捕获灵敏度:-148dBm跟踪灵敏度:-162dBm⏹定位精度:2.5米(CEP50)⏹内置天线检测及天线短路保护功能1.4.产品尺寸产品尺寸长x宽x高为:95mm x50mm x30mm,其中95mm包含长度80mm和两个安装孔15m图1-1产品尺寸1.5.硬件接口图1-2硬件接口硬件接口定义见表1-2硬件接口定义。
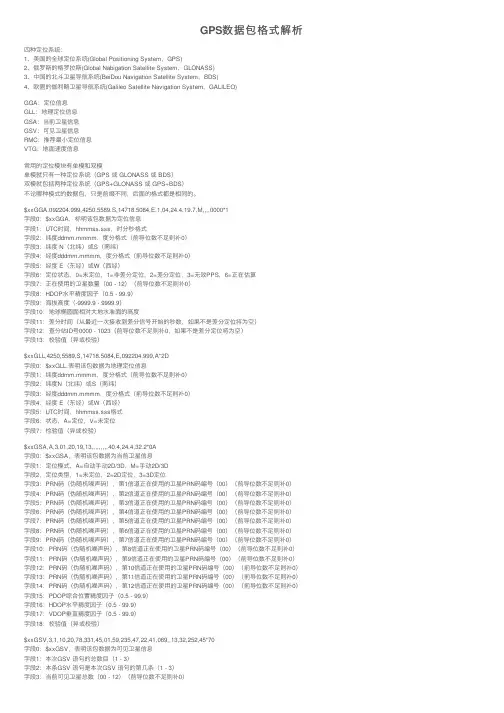
GPS数据包格式解析四种定位系统:1、美国的全球定位系统(Global Positioning System,GPS)2、俄罗斯的格罗拉斯(Global Nabigation Satellite System,GLONASS)3、中国的北⽃卫星导航系统(BeiDou Navigation Satellite System,BDS)4、欧盟的伽利略卫星导航系统(Galileo Satellite Navigation System,GALILEO)GGA:定位信息GLL:地理定位信息GSA:当前卫星信息GSV:可见卫星信息RMC:推荐最⼩定位信息VTG:地⾯速度信息常⽤的定位模块有单模和双模单模就只有⼀种定位系统(GPS 或 GLONASS 或 BDS)双模就包括两种定位系统(GPS+GLONASS 或 GPS+BDS)不论哪种模式的数据包,只是前缀不同,后⾯的格式都是相同的。
$xxGGA,092204.999,4250.5589,S,14718.5084,E,1,04,24.4,19.7,M,,,,0000*1字段0:$xxGGA,标明该包数据为定位信息字段1:UTC时间,hhmmss.sss,时分秒格式字段2:纬度ddmm.mmmm,度分格式(前导位数不⾜则补0)字段3:纬度 N(北纬)或S(南纬)字段4:经度dddmm.mmmm,度分格式(前导位数不⾜则补0)字段5:经度 E(东经)或W(西经)字段6:定位状态,0=未定位,1=⾮差分定位,2=差分定位,3=⽆效PPS,6=正在估算字段7:正在使⽤的卫星数量(00 - 12)(前导位数不⾜则补0)字段8:HDOP⽔平精度因⼦(0.5 - 99.9)字段9:海拔⾼度(-9999.9 - 9999.9)字段10:地球椭圆⾯相对⼤地⽔准⾯的⾼度字段11:差分时间(从最近⼀次接收到差分信号开始的秒数,如果不是差分定位将为空)字段12:查分站ID号0000 - 1023(前导位数不⾜则补0,如果不是差分定位将为空)字段13:校验值(异或校验)$xxGLL,4250,5589,S,14718.5084,E,092204.999,A*2D字段0:$xxGLL,表明该包数据为地理定位信息字段1:纬度ddmm.mmmm,度分格式(前导位数不⾜则补0)字段2:纬度N(北纬)或S(南纬)字段3:经度dddmm.mmmm,度分格式(前导位数不⾜则补0)字段4:经度 E(东经)或W(西经)字段5:UTC时间,hhmmss.sss格式字段6:状态,A=定位,V=未定位字段7:检验值(异或校验)$xxGSA,A,3,01,20,19,13,,,,,,,,,40.4,24.4,32.2*0A字段0:$xxGSA,表明该包数据为当前卫星信息字段1:定位模式,A=⾃动⼿动2D/3D,M=⼿动2D/3D字段2,定位类型,1=未定位,2=2D定位,3=3D定位字段3:PRN码(伪随机噪声码),第1信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段4:PRN码(伪随机噪声码),第2信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段5:PRN码(伪随机噪声码),第3信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段6:PRN码(伪随机噪声码),第4信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段7:PRN码(伪随机噪声码),第5信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段8:PRN码(伪随机噪声码),第6信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段9:PRN码(伪随机噪声码),第7信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段10:PRN码(伪随机噪声码),第8信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段11:PRN码(伪随机噪声码),第9信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段12:PRN码(伪随机噪声码),第10信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段13:PRN码(伪随机噪声码),第11信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段14:PRN码(伪随机噪声码),第12信道正在使⽤的卫星PRN码编号(00)(前导位数不⾜则补0)字段15:PDOP综合位置精度因⼦(0.5 - 99.9)字段16:HDOP⽔平精度因⼦(0.5 - 99.9)字段17:VDOP垂直精度因⼦(0.5 - 99.9)字段18:校验值(异或校验)$xxGSV,3,1,10,20,78,331,45,01,59,235,47,22,41,069,,13,32,252,45*70字段0:$xxGSV,表明该包数据为可见卫星信息字段1:本次GSV 语句的总数⽬(1 - 3)字段2:本条GSV 语句是本次GSV 语句的第⼏条(1 - 3)字段3:当前可见卫星总数(00 - 12)(前导位数不⾜则补0)字段4:PRN 码(伪随机噪声码)(01 - 32)(前导位数不⾜则补0)字段5:卫星仰⾓(00 - 90)度(前导位数不⾜则补0)字段6:卫星⽅位⾓(00 - 359)度(前导位数不⾜则补0)字段7:信噪⽐(00-99)dbHz字段8:PRN 码(伪随机噪声码)(01 - 32)(前导位数不⾜则补0)字段9:卫星仰⾓(00 - 90)度(前导位数不⾜则补0)字段10:卫星⽅位⾓(00 - 359)度(前导位数不⾜则补0)字段11:信噪⽐(00-99)dbHz字段12:PRN 码(伪随机噪声码)(01 - 32)(前导位数不⾜则补0)字段13:卫星仰⾓(00 - 90)度(前导位数不⾜则补0)字段14:卫星⽅位⾓(00 - 359)度(前导位数不⾜则补0)字段15:信噪⽐(00-99)dbHz字段16:校验值(异或校验)$xxRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,150706,,,A*50字段0:$xxRMC,表明该包数据为推荐最⼩定位信息字段1:UTC 时间,hhmmss.sss 格式字段2:状态,A=定位,V=未定位字段3:纬度ddmm.mmmm,度分格式(前导位数不⾜则补0)字段4:纬度N(北纬)或S(南纬)字段5:经度dddmm.mmmm,度分格式(前导位数不⾜则补0)字段6:经度E(东经)或W(西经)字段7:速度,节,Knots字段8:⽅位⾓,度字段9:UTC ⽇期,DDMMYY 格式字段10:磁偏⾓,(000 - 180)度(前导位数不⾜则补0)字段11:磁偏⾓⽅向,E=东W=西字段16:校验值(异或校验)$xxVTG,89.68,T,,M,0.00,N,0.0,K*5F字段0:$xxVTG,表明该包数据为地⾯速度信息字段1:运动⾓度,000 - 359,(前导位数不⾜则补0)字段2:T=真北参照系字段3:运动⾓度,000 - 359,(前导位数不⾜则补0)字段4:M=磁北参照系字段5:⽔平运动速度(0.00)(前导位数不⾜则补0)字段6:N=节,Knots字段7:⽔平运动速度(0.00)(前导位数不⾜则补0)字段8:K=公⾥/时,km/h字段9:校验值(异或校验)。
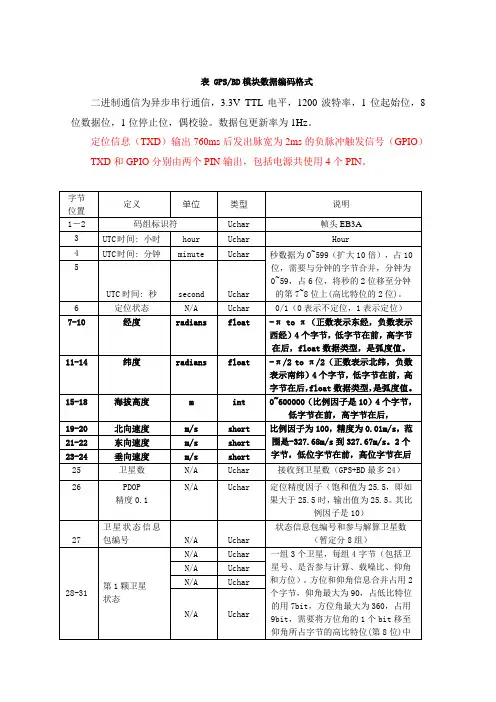
表 GPS/BD 模块数据编码格式二进制通信为异步串行通信,3.3V TTL 电平,1200波特率,1位起始位,8位数据位,1位停止位,偶校验。
数据包更新率为1Hz 。
定位信息(TXD )输出760ms 后发出脉宽为2ms 的负脉冲触发信号(GPIO ) TXD 和GPIO 分别由两个PIN 输出,包括电源共使用4个PIN 。
字节位置 定义单位类型 说明 1-2 码组标识符Uchar 帧头EB3A 3 UTC 时间: 小时 hour Uchar Hour4 UTC 时间: 分钟minute Uchar秒数据为0~599(扩大10倍),占10位,需要与分钟的字节合并,分钟为0~59,占6位,将秒的2位移至分钟的第7~8位上(高比特位的2位)。
5UTC 时间: 秒second Uchar 6 定位状态 N/A Uchar 0/1(0表示不定位,1表示定位) 7-10经度radiansfloat-π to π(正数表示东经,负数表示西经)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。
11-14 纬度 radians float-π/2 to π/2(正数表示北纬,负数表示南纬)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。
15-18 海拔高度 m int 0~600000(比例因子是10)4个字节,低字节在前,高字节在后, 19-20 北向速度 m/s short 比例因子为100,精度为0.01m/s ,范围是-327.68m/s 到327.67m/s 。
2个字节,低位字节在前,高位字节在后 21-22 东向速度 m/s short 23-24 垂向速度 m/s short 25 卫星数 N/A Uchar 接收到卫星数(GPS+BD 最多24) 26PDOP 精度0.1 N/AUchar定位精度因子(饱和值为25.5,即如果大于25.5时,输出值为25.5。

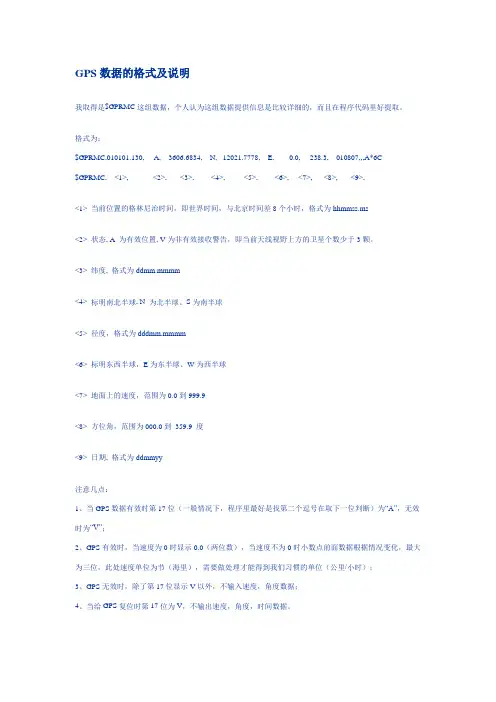
GPS数据的格式及说明我取得是$GPRMC这组数据,个人认为这组数据提供信息是比较详细的,而且在程序代码里好提取。
格式为:$GPRMC,010101.130, A, 3606.6834, N, 12021.7778, E, 0.0, 238.3, 010807,,,A*6C $GPRMC, <1>, <2>, <3>, <4>, <5>, <6>, <7>, <8>, <9>,<1> 当前位置的格林尼治时间,即世界时间,与北京时间差8个小时,格式为hhmmss.ms<2> 状态, A 为有效位置, V为非有效接收警告,即当前天线视野上方的卫星个数少于3颗。
<3> 纬度, 格式为ddmm.mmmm<4> 标明南北半球, N 为北半球、S为南半球<5> 径度,格式为dddmm.mmmm<6> 标明东西半球,E为东半球、W为西半球<7> 地面上的速度,范围为0.0到999.9<8> 方位角,范围为000.0到359.9 度<9> 日期, 格式为ddmmyy注意几点:1、当GPS数据有效时第17位(一般情况下,程序里最好是找第二个逗号在取下一位判断)为“A”,无效时为“V”;2、GPS有效时,当速度为0时显示0.0(两位数),当速度不为0时小数点前面数据根据情况变化,最大为三位,此处速度单位为节(海里),需要做处理才能得到我们习惯的单位(公里/小时);3、GPS无效时,除了第17位显示V以外,不输入速度,角度数据;4、当给GPS复位时第17位为V,不输出速度,角度,时间数据。
我了解的也就这么多了,有哪里说的不详细的可以直接问我。
加我QQ请加说明。
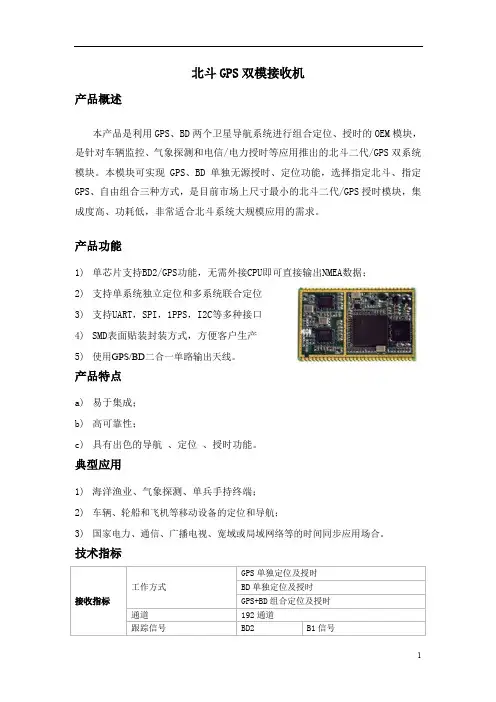
1 产品描述BNGB-01是一款GPS/BD2双模高感导航定位模块。
在弱信号环境中,具有出色的信号捕获能力。
适用于车载导航终端,以及便携式电子设备诸如自动导航设备,手持设备等。
2 产品特点高性能的BD2/GPS双模芯片,支持SBAS灵敏度高,自动跟踪灵敏度-162dBm信号快速捕获跟踪采用SMT邮票式封装尺寸小3 技术参数3.1 物理特性1)尺寸: 16×12.2×2.2mm3.2 环境特征1) 工作温度: -30℃~ +85℃2) 储存温度: -40℃~ +125℃3) 工作湿度:5%~95%RH,无凝结3.3 电气特性1)工作电压:+3.3V DC ±5%2)备用电池:+3.3V DC ±10%3)功耗:125mA @ 3.3V3.4 性能指标1)频率: GPS L1:C/A码; BD2 B1;支持SBAS2)通道数:36通道3) 更新率:默认1Hz4) 定位精度:水平:<5m速度:0.1m/s5) 1PPS: 1ms RMS6) 定位时间:冷启动时间: 33s热启动时间:21s失锁重捕: <1s7) 跟踪灵敏度:–162 dBm8)高度限制:<18,000m 速度限制:<300m/s 加速度:<3g 3.5 接口特性1) 串口:UART/USB/SPI/IIC,串口波特率默认9600;2) 1PPS输出:3.3V LVCMOS电平, 脉宽100ms;3)协议: NMEA0183协议 V4.04 管脚定义BNGB-01导航定位模块为24-pin封装,其管脚定义如下表所示。
图1 封装示意图 TOP View5 结构尺寸。
1.什么叫双模芯片?有单独北斗芯片?答: 北斗+GPS两用为双模.目前,没有单独北斗芯片的产品,单独北斗芯片都是测试实验,目前双模的芯片都可以设置成单独的北斗或单独GPS输出。
2.什么是芯片? 什么是模块?答: GPS芯片包含了RF射频芯片,基带芯片及微处理器的芯片组,多为贴片式的,不能与天线直接连接使用。
GPS模块是集成了RF射频芯片、基带芯片和核心CPU,并加上相关外围电路而组成的一个集成电路。
即接上电源和天线就可以使用, 为模块. 输出多为TTL.3. 何为转换板/开发板? 起什么作用?答: 为了方便使用芯片,我们制作了转换板,可以方便的接PC机,单片机等,转换板=外围电路+天线接口+电源接口+输出/输入接口转换TTl转USB或转RS232等,客户可以直接通上电源可工作.4.接单片机和计算机机怎么接?答: 接单片通常用TTL输出的转换板套件连接即可使用.计算机可以用USB接口或RS232接口套件即可使用.5.有技术支持和相应软件吗?答: 有. 可以去天工测控官网上看.6.1PP秒脉冲是什么意思?答: 1PPS秒脉冲是就每秒一个脉冲信号的意思. 和时间同步使用。
输出方式都是全球统一.7. 北斗/GPS双模套餐有几种? 如何选?答: 套餐多种, 由芯片/转换板/天线/实验箱等任意组合. 按输出接口不同有不同的方式,如: TTL,TTL+232, 再加天线, 任意组合.8. 如何操作使用?答: 按说明要求,电源一般(3.0V-4.2V)通电就有输出, 通常速率为4800/9600波特率, NMEA0183格式输出, 1秒一次, TTL电平数据,全球统一的.9. 双模芯片输出内容如何?答: 任何GPS/北斗芯片/模块都一样, 如SKG12D,1秒输出6条信息,GPS定位精度3米。
双模定位比单独的要精确, 定位功能可以自己选择,通过命令(指令集)关闭/打开任意输出的数据信息。
保留哪些信息根据需要自己采集。
下面是调试模组用串口监控到的数据:无卫星状态:$GPGGA,000355.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*44 $GPGSA,A,1,,,,,,,,,,,,,,,*1E$GPGSV,1,1,00*79$GPRMC,000355.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*79 $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000356.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*47 $GPRMC,000356.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*7A $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000357.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*46 $GPRMC,000357.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*7B $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000358.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*49 $GPRMC,000358.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*74 $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000359.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*48 $GPRMC,000359.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*75 $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000400.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*43 $GPGSA,A,1,,,,,,,,,,,,,,,*1E$GPGSV,1,1,00*79$GPRMC,000400.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*7E $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000401.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*42 $GPRMC,000401.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*7F $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000402.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*41 $GPRMC,000402.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*7C $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000403.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*40 $GPRMC,000403.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*7D $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000404.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*47 $GPRMC,000404.026,V,8960.0000,N,00000.0000,E,0.00,0.00,060180,,,N*7A $GPVTG,0.00,T,,M,0.00,N,0.00,K,N*32$GPGGA,000405.026,8960.0000,N,00000.0000,E,0,0,,137.0,M,13.0,M,,*46 $GPGSA,A,1,,,,,,,,,,,,,,,*1E有卫星状态:$GPGGA,090113.000,3958.2847,N,11616.6454,E,1,8,1.00,67.6,M,-6.7,M,,*7 8$GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090114.000,3958.2847,N,11616.6456,E,1,8,1.00,67.7,M,-6.7,M,,*7 C$GPRMC,090114.000,A,3958.2847,N,11616.6456,E,0.00,0.00,080110,,,A*65 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090115.000,3958.2846,N,11616.6456,E,1,8,1.00,67.7,M,-6.7,M,,*7 C$GPRMC,090115.000,A,3958.2846,N,11616.6456,E,0.00,0.00,080110,,,A*65 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090116.000,3958.2846,N,11616.6456,E,1,8,1.00,67.8,M,-6.7,M,,*7 0$GPRMC,090116.000,A,3958.2846,N,11616.6456,E,0.00,0.00,080110,,,A*66 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090117.000,3958.2845,N,11616.6457,E,1,8,1.00,67.8,M,-6.7,M,,*7 3$GPGSA,A,3,29,15,10,18,09,21,24,27,,,,,1.28,1.00,0.79*08 $GPGSV,3,1,10,24,78,302,38,15,77,207,42,29,36,238,48,10,33,073,24*76 $GPGSV,3,2,10,21,29,310,39,08,22,054,,18,15,276,42,27,14,167,36*7D $GPGSV,3,3,10,09,05,175,35,40,,,*45$GPRMC,090117.000,A,3958.2845,N,11616.6457,E,0.00,0.00,080110,,,A*65 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090118.000,3958.2846,N,11616.6457,E,1,8,1.00,67.8,M,-6.7,M,,*7 F$GPRMC,090118.000,A,3958.2846,N,11616.6457,E,0.00,0.00,080110,,,A*69 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090119.000,3958.2846,N,11616.6458,E,1,9,0.85,67.8,M,-6.7,M,,*7 C$GPRMC,090119.000,A,3958.2846,N,11616.6458,E,0.00,0.00,080110,,,A*67 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090120.000,3958.2847,N,11616.6459,E,1,9,0.85,67.8,M,-6.7,M,,*7 6$GPRMC,090120.000,A,3958.2847,N,11616.6459,E,0.00,0.00,080110,,,A*6D $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090121.000,3958.2847,N,11616.6460,E,1,9,0.85,67.8,M,-6.7,M,,*7 D$GPRMC,090121.000,A,3958.2847,N,11616.6460,E,0.00,0.00,080110,,,A*66 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090122.000,3958.2847,N,11616.6461,E,1,9,0.85,67.8,M,-6.7,M,,*7 F$GPGSA,A,3,29,15,10,18,09,21,24,08,27,,,,1.14,0.85,0.77*0D $GPGSV,3,1,10,24,78,302,38,15,77,207,42,29,36,238,48,10,33,073,22*70 $GPGSV,3,2,10,21,29,310,39,08,22,054,21,18,15,276,42,27,14,167,36*7E $GPGSV,3,3,10,09,05,175,35,43,,,*46$GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3D$GPGGA,090123.000,3958.2848,N,11616.6462,E,1,9,0.85,67.8,M,-6.7,M,,*7 2$GPRMC,090123.000,A,3958.2848,N,11616.6462,E,0.00,0.00,080110,,,A*69 $GPVTG,0.00,T,,M,0.00,N,0.00,K,A*3DGPS数据格式定义为(以数据手册为准):GPS 数据格式GPRMC(建议使用最小GPS数据格式)$GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11><CR><LF>1) 标准定位时间(UTC time)格式:时时分分秒秒.秒秒秒(hhmmss.sss)。
GPS模块数据格式定义简介NMEA 0183是美国国家海洋电子协会(National Marine Electronics Association)为海用电子设备制定的标准格式。
目前业已成了GPS导航设备统一的RTCM ( Radio Technical Commission forMaritime services)标准协议。
NMEA-0183协议采用ASCII码来传递GPS定位信息,我们称之为帧。
帧格式形如:$aaccc,ddd,ddd,…,ddd*hh(CR)(LF)1、“ $” :帧命令起始位2、aaccc:地址域,前两位为识别符(aa),后三位为语句名( ccc)3、ddd…ddd:数据4、“ *” :校验和前缀(也可以作为语句数据结束的标志)5、 hh:校验和( check sum), $与*之间所有字符ASCII码的校验和(各字节做异或运算,得到校验和后,再转换16进制格式的ASCII字符)6、 (CR)(LF):帧结束,回车和换行符序号命令说明最大帧长1 $GPGGA GPS定位信息 722 $GPGSA 当前卫星信息 653 $GPGSV 可见卫星信息 2104 $GPRMC 推荐定位信息 705 $GPVTG 地面速度信息 346 $GPGLL 大地坐标信息7 $GPZDA 当前时间(UTC)信息UTC 时间即协调世界时,相当于本初子午线(0 度经线)上的时间,北京时间比 UTC 早 8 个小时。
3.2 指令讲解1, $GPGGA( GPS定位信息, Global Positioning System Fix Data)$GPGGA语句的基本格式如下(其中M指单位M,hh指校验和,CR和LF代表回车换行,下同):$GPGGA,(1),(2),(3),(4),(5),(6),(7),(8),(9),M,(10),M,(11),(12)*hh( CR)(LF)(1)UTC时间,格式为hhmmss.ss;(2)纬度,格式为ddmm.mmmmm(度分格式);(3)纬度半球, N或S(北纬或南纬);(4)经度,格式为dddmm.mmmmm(度分格式);(5)经度半球, E或W(东经或西经);(6)GPS状态, 0=未定位, 1=非差分定位, 2=差分定位;(7)正在使用的用于定位的卫星数量( 00~12)(8)HDOP水平精确度因子( 0.5~99.9)(9)海拔高度( -9999.9到9999.9米)(10)大地水准面高度( -9999.9到9999.9米)(11)差分时间(从最近一次接收到差分信号开始的秒数,非差分定位,此项为空)(12)差分参考基站标号(0000到1023,首位0也将传送,非差分定位,此项为空)举例如下:$GPGGA,023543.00,2308.28715,N,11322.09875,E,1,06,1.49,4 1.6,M,-5.3,M,,*7D2, $GPGSA(当前卫星信息)$GPGSA语句的基本格式如下:$GPGSA,(1),(2),(3),(3),(3),(3),(3),(3),(3),(3),(3),(3),(3),(3),(4),(5),( 6)*hh(CR)(LF)(1) 模式, M = 手动, A = 自动。
GPS/北斗定位模块使用说明书文档版本:V1.2目录1.产品介绍 (3)1.1产品概述 (3)1.2功能特点 (3)1.3设备技术参数 (3)1.4产品选型 (3)2.设备使用说明 (4)2.1设备安装前检查 (4)2.2接口定义 (4)3.配置软件安装及使用 (5)3.1软件选择 (5)4.通信协议 (6)4.1通讯基本参数 (6)4.2数据帧格式定义 (6)4.3寄存器地址 (7)4.4通讯协议示例以及解释 (8)4.4.1读取设备地址0x01的定位状态 (8)4.4.2读取设备地址0x01的经度 (8)4.4.3修改地址 (9)5.联系方式 (10)6.文档历史 (10)附录:壳体尺寸 (11)1.产品介绍1.1产品概述我公司研发生产的GPS/北斗定位模块,是一款具有GPS定位和北斗定位的双模定位终端,可以快速、有效、精确定位位置。
GPS/北斗定位模块内含双模定位芯片,可快速定位位置,并且将定位信息以RS232/485接口和ModBus协议的方式提供给用户使用,并可以通过PC 机设置软件或串口命令轻松控制,使用方便快捷。
1.2功能特点同时支持GPS定位和北斗定位(北斗二号和北斗三号1-63号全部卫星)采用WGS84世界大地坐标系,精准定位经纬度信息可实时读取对地速度、对地航向、海拔高度等信息串口波特率自定义,支持1200~115200bps模块串口波特率等参数可通过PC机或串口命令配置RS232/485带TVS、过流等保护提供天线状态诊断,提供天线开路、短路等状态信息1.3设备技术参数供电DC7~30V功耗0.348W使用环境工作温度-20℃~+60℃,0%RH~95%RH非结露通信接口RS232/485接口可选;通信波特率:1200~115200可设天线接口接我公司提供的GPS+北斗双频天线定位精度 2.5m(CEP50)海拔高度典型精度:±10m对地速度<0.36km/h(1σ)1.4产品选型RS-公司代号GPSBDS-GPS北斗定位模块N01-RS485(ModBus-RTU协议)N02-RS232(标准RS232-DB9接口)1GPS北斗定位模块外壳2.设备使用说明2.1设备安装前检查设备清单■GPS北斗定位模块1台■产品合格证、保修卡等■GPS+北斗双频天线安装尺寸:Φ2.5mm88mm2.2接口定义序号标识说明1DC10-30V电源输入设备供电10-30VDC宽压供电2Ant北斗+GPS双频天线3通信设备485通信灯4运行设备运行灯5电源正电源输出正6电源负电源输出负7485A通信:485-A8485B通信:485-B注:通信灯在设备485通信时亮0.1s,设备运行灯正常工作(定位成功)时亮0.5s,熄灭0.5s,异常(未定位成功)时亮0.1s,熄灭0.9s,且模块只需要一端供电就可以正常工作,另一端电源是为后级供电而准备,如不对后级进行供电,可悬空。
GPS/北斗双模授时器GPS/BD X产品说明书苏州全波通信技术有限公司目录1产品简介 (3)1.1功能介绍 (3)1.2系统框图 (3)图1 GPS/北斗双模授时器GPS/BD X系统框图 (3)2产品结构 (4)2.1结构图 (4)图2 GPS/北斗双模授时器GPS/BD X结构图 (4)2.2产品前面板图 (5)图3 GPS/北斗双模授时器GPS/BD X前面板图 (5)2.3产品后面板图 (5)图4 GPS/北斗双模授时器GPS/BD X后面板图 (5)3主要特性和技术说明 (7)3.1主要特性 (7)3.2技术说明 (7)表1 GPS/北斗双模授时器GPS/BD X物理参数 (7)表2 GPS/北斗双模授时器GPS/BD X技术参数 (8)4全中文操作界面使用说明 (10)4.1开机 (10)4.2待机模式 (10)4.3查询模式 (10)表3 查询模式下的界面1 (10)表4 查询模式下的界面2 (11)4.4全中文操作界面使用说明 (11)图5 授时器状态参数 (12)图6 授时器系统参数 (13)5监控数据帧格式 (14)1产品简介1.1功能介绍本公司研发的GPS/北斗双模授时器具备同时接收GPS 系统和北斗系统共同提供的时间信息和定时信号功能,当其中一套系统失效时能自动切换到另一套系统继续稳定工作,能为网络设备提供精确、标准、安全、可靠的时间服务。
本产品采用模块化设计,精度高、性能好、功能强、功耗低,无积累误差,不受地域气候等环境条件限制,全自动智能化运行,操作简单,免维护,适合无人值守。
本产品可为广电单频网系统、计算机网络系统、电力自动化系统、水利自动化系统、电子商务系统等提供精密的标准时间信号和时间戳服务,已经被成功应用在广电、交通、金融、通信、安防、电力、水利、医疗、教育、IT 等领域。
本产品采用全中文操作界面,可通过RJ45接口、按键进行系统控制和监测。
本产品支持远程升级,可通过RJ45口完成对授时器的系统升级。
XN647-BDBD/GPS多模卫星导航通用接收机模组产品说明书功能描述1.1概述本模块是一款支持BD2 B1/GPS L1频点的双模导航定位模块。
模块尺寸为16mm x 12mm x 2.65 mm ,采用24pin 邮票孔封装。
本模块内部具备天线状态检测和天线短路保护功能,支持休眠工作模式。
1.2产品特性24pin由B票孑L封装,尺寸16mm x 12mm x 2.5 mm支持BD2 B1和GPS L1频点支持以下三种工作模式1)单BD2 B1工作模式2)单GPS L1工作模式3)BD2 B1/GPS L1混合工作模式内置BD2 B1/GPS L1的LNA (低噪声放大器)。
具有天线状态检测和天线短路保护的功能。
具有备份电源输入接口,支持热启动。
内部自带上电复位电路,并支持用户在使用中对模块进行外部复位。
1.3性能指标1.4应用个人定位和导航产品车载、船舶定位导航1.5功能框图和典型应用1.5.1功能框图图1-1双模导航定位模块功能框图本双模导航定位模块可对外部BD2 B1/GPS L1有源天线供电,并具有天线状态检测和天线短路保护功能。
外部有源天线接收空中卫星信号送给射频芯片,射频芯片内部经LNA放大、混频处理后送到中频滤波器,再经过AD转换成数字中频信号送给基带芯片。
基带芯片接收到射频芯片送来的数字中频信号,经过捕获和跟踪、定位解算等一系列算法处理后,通过串口输出NMEA数据并给出1PPS信号。
1.5.2典型应用图1-2双模导航定位模块典型应用图2模块接口说明2.1硬件接口2.1.1电源模块有两个电源输入管脚(VCC、V-BCK)与两个电源输出管脚(VCC-RF)。
其中VCC为模块的工作主电源;V-BCK为模块的备份输入电源,在主电源VCC断电时给RTC电路供电,确保关键信息不丢失,以实现热启动功能,模块内部设计有对备用电源V-BCK 的充电电路,推荐外接可充电的电池或大容量电容;VCC-RF输出VCC电压值,可用于天线供电。
表 GPS/BD 模块数据编码格式
二进制通信为异步串行通信,3.3V TTL 电平,1200波特率,1位起始位,8位数据位,1位停止位,偶校验。
数据包更新率为1Hz 。
定位信息(TXD )输出760ms 后发出脉宽为2ms 的负脉冲触发信号(GPIO ) TXD 和GPIO 分别由两个PIN 输出,包括电源共使用4个PIN 。
字节位置 定义
单位
类型 说明 1-2 码组标识符
Uchar 帧头EB3A 3 UTC 时间: 小时 hour Uchar Hour
4 UTC 时间: 分钟
minute Uchar
秒数据为0~599(扩大10倍),占10位,需要与分钟的字节合并,分钟为0~59,占6位,将秒的2位移至分钟的第7~8位上(高比特位的2位)。
5
UTC 时间: 秒
second Uchar 6 定位状态 N/A Uchar 0/1(0表示不定位,1表示定位) 7-10
经度
radians
float
-π to π(正数表示东经,负数表示西经)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。
11-14 纬度 radians float
-π/2 to π/2(正数表示北纬,负数表示南纬)4个字节,低字节在前,高字节在后,float 数据类型,是弧度值。
15-18 海拔高度 m int 0~600000(比例因子是10)4个字节,
低字节在前,高字节在后, 19-20 北向速度 m/s short 比例因子为100,精度为0.01m/s ,范围是-327.68m/s 到327.67m/s 。
2个字节,低位字节在前,高位字节在后 21-22 东向速度 m/s short 23-24 垂向速度 m/s short 25 卫星数 N/A Uchar 接收到卫星数(GPS+BD 最多24) 26
PDOP 精度0.1 N/A
Uchar
定位精度因子(饱和值为25.5,即如果大于25.5时,输出值为25.5。
其比
例因子是10) 27 卫星状态信息包编号
N/A Uchar 状态信息包编号和参与解算卫星数
(暂定分8组) 28-31
第1颗卫星 状态
N/A Uchar 一组3个卫星,每组4字节(包括卫星号、是否参与计算、载噪比、仰角和方位)。
方位和仰角信息合并占用2个字节,仰角最大为90,占低比特位的用7bit ,方位角最大为360,占用9bit ,需要将方位角的1个bit 移至仰角所占字节的高比特位(第8位)中
N/A Uchar N/A
Uchar
N/A Uchar
- 2 -
注:1)字节27-卫星状态包编号表示本数据包中卫星状态信息的编号(3bit ),从0开始,要发送24颗卫星的状态信息,则该编号为0~7,占低比特位;以及参与解算卫星数(5位),占高比特位;
2)字节35-41卫星状态信息中,共三组,每组四字节,第一字节中7bit 表示卫星号(其中GPS 的卫星号为1~32,北斗2的卫星号为实际卫星号+50。
),占低比特位,第8个bit 代表该颗卫星是否参与计算,高比特位,参与计算则为1,不参与计算则为0;信噪比占用1个字节;方位和仰角信息合并占用2个字节,仰角最大为90,占低比特位的用7bit ,方位角最大为360,占用9bit ,需要将方位角的1个bit 移至仰角所占字节的高比特位(第8位)中。
3) 每个多字节数据的低字节在前,高字节在后。
32-35
第2颗卫星 状态
N/A Uchar 一组3个卫星,每组4字节(包括卫星号、是否参与计算、载噪比、仰角和方位)。
方位和仰角信息合并占用2个字节,仰角最大为90,占低比特位的用7bit ,方位角最大为360,占用9bit ,需要将方位角的1个bit 移至仰角所占字节的高比特位(第8位)中 N/A
Uchar N/A
Uchar
N/A Uchar
36-39
第3颗卫星 状态
N/A Uchar 一组3个卫星,每组4字节(包括卫星号、是否参与计算、载噪比、仰角和方位)。
方位和仰角信息合并占用2个字节,仰角最大为90,占低比特位的用7bit ,方位角最大为360,占用9bit ,需要将方位角的1个bit 移至仰角所占字节的高比特位(第8位)中 N/A
Uchar N/A
Uchar
N/A Uchar
40-41 校验和 N/A short
字尾(16比特校验和为无符号短整型数,其为所有信息字节(包括帧头)求和,忽略超出16位的进位和溢出。
低字节先发,高字节后发。
)。