LOG与Canny边缘检测比较
- 格式:docx
- 大小:4.65 MB
- 文档页数:13
halcon边缘检测例子Halcon是一款功能强大的机器视觉库,其边缘检测功能可以帮助我们在图像中找出物体的边缘,从而实现目标检测和分割。
下面将以Halcon边缘检测例子为题,列举一些常用的边缘检测方法和技巧。
一、Sobel算子边缘检测Sobel算子是一种常用的边缘检测算法,它通过计算图像的一阶导数来寻找边缘。
Halcon中可以使用函数SobelA来实现Sobel算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
二、Canny算子边缘检测Canny算子是一种经典的边缘检测算法,它结合了高斯滤波、梯度计算和非最大值抑制等步骤,可以得到更准确的边缘检测结果。
Halcon中可以使用函数EdgesSubPix来实现Canny算子的边缘检测,可以设置不同的参数来调整检测结果的质量和灵敏度。
三、Laplacian算子边缘检测Laplacian算子是一种基于二阶导数的边缘检测算法,它可以检测出图像中的高频变化,从而找到边缘。
Halcon中可以使用函数Laplace来实现Laplacian算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
四、Roberts算子边缘检测Roberts算子是一种简单但有效的边缘检测算法,它通过计算图像中像素点的灰度差来判断是否存在边缘。
Halcon中可以使用函数RobertsA来实现Roberts算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
五、Prewitt算子边缘检测Prewitt算子是一种基于一阶导数的边缘检测算法,它通过计算图像中像素点的灰度变化来寻找边缘。
Halcon中可以使用函数PrewittA来实现Prewitt算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
六、Scharr算子边缘检测Scharr算子是一种改进的Sobel算子,它可以更好地抵抗噪声干扰,提供更准确的边缘检测结果。
Halcon中可以使用函数ScharrA来实现Scharr算子的边缘检测,可以设置不同的参数来调整检测结果的灵敏度。
图像边缘提取方法综述摘要图像最基本的特征是边缘,边缘是图像性区域和另一个属性区域的交接处,是区域属性发生突变的地方,是图像中不确定性最大的地方,也是图像信息最集中的地方,图像的边缘包含着丰富的信息。
因此,图像边缘提取一直以来都是图像处理与分析领域的研究热点。
本文对传统的具有代表性的各种图像边缘提取方法进行了阐述、对比和分析了各自的优缺点,为了更清楚地看出各种算法的效果,给出了一些常用算法对同一副标准测试图像进行边缘提取的实验结果。
同时,本文对现代的一些边缘检测方法如小波分析、形态学等也作了简要的介绍,重点分析了以上各种算法在图像边缘提取中的发展状况和优缺点。
最后提出了在实践中要根据待解决的问题的特点和要求决定采取何种方法。
关键词:图像处理;边缘提取;小波变换1 图像边缘提取概述人获得的绝大部分信息来源于图像信息,而在图像信息中又以边界信息最为丰富,它传递和表达着物体的空间几何信息,可以判定物体的大小、形状、类型甚至地理位置。
边缘特征是图像最基本的特征。
边缘是图像性区域和另一个属性区域的交界处,是区域性属性发生突变的地方,是图像中不确定性最大的地方,也是图像信息最集中的地方,图像的边缘包含着丰富的信息。
当把边界从目标图像中提取出来后,目标物体的信息能够更直观地展现在人们面前,对于用计算机处理目标物更为有利。
因此,数字图像的边缘检测是图像分析处理领域十分重要的基础,在工程应用中占有十分重要的地位。
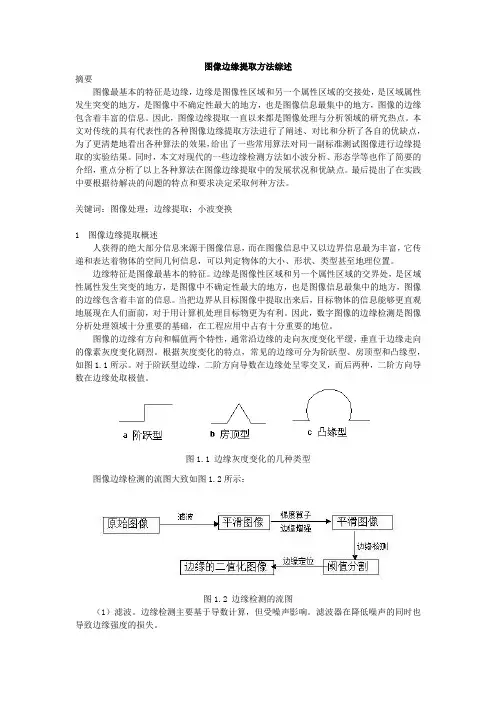
图像的边缘有方向和幅值两个特性,通常沿边缘的走向灰度变化平缓,垂直于边缘走向的像素灰度变化剧烈。
根据灰度变化的特点,常见的边缘可分为阶跃型、房顶型和凸缘型,如图1.1所示。
对于阶跃型边缘,二阶方向导数在边缘处呈零交叉,而后两种,二阶方向导数在边缘处取极值。
图1.1 边缘灰度变化的几种类型图像边缘检测的流图大致如图1.2所示:图1.2 边缘检测的流图(1)滤波。
边缘检测主要基于导数计算,但受噪声影响。
滤波器在降低噪声的同时也导致边缘强度的损失。
几种常用边缘检测算法的比较边缘检测是在数字图像上寻找图像亮度变化的过程,它对于图像处理和计算机视觉任务非常重要。
常见的边缘检测算法有Sobel算子、Prewitt算子、Roberts算子和Canny边缘检测算法。
本文将对这几种算法进行比较。
1. Sobel算子:Sobel算子是一种常见的边缘检测算法,它通过计算图像像素点与其邻域像素点之间的差异来检测边缘。
Sobel算子具有简单、快速的优点,可以检测水平和垂直方向的边缘,但对于斜向边缘检测效果较差。
2. Prewitt算子:Prewitt算子也是一种常用的边缘检测算法,它类似于Sobel算子,通过计算图像像素点与其邻域像素点之间的差异来检测边缘。
Prewitt算子可以检测水平、垂直和斜向边缘,但对于斜向边缘的检测结果可能不够精确。
3. Roberts算子:Roberts算子是一种简单的边缘检测算法,它通过计算图像像素点与其对角线方向上的邻域像素点之间的差异来检测边缘。
Roberts算子计算简单,但对于噪声敏感,容易产生干扰边缘。
4. Canny边缘检测算法:Canny边缘检测算法是一种经典的边缘检测算法,它包含多个步骤:高斯滤波、计算梯度、非最大抑制和双阈值处理。
Canny算法具有良好的边缘定位能力,并且对于噪声和细节边缘具有较好的抑制效果。
但Canny算法计算复杂度较高,在处理大规模图像时可能较慢。
综上所述,不同的边缘检测算法具有各自的优缺点。
若要选择适合应用的算法,需要综合考虑图像特点、计算复杂度和应用需求等因素。
如果对图像边缘的方向要求不高,可以选择Sobel或Prewitt算子;如果对图像边缘的方向要求较高,可以选择Canny算法。
另外,为了获得更好的边缘检测结果,通常需要进行适当的预处理,如灰度化、滤波和阈值处理等。
最后,对于不同的应用场景,可能需要使用不同的算法或算法组合来满足特定需求。
边缘检测的原理概述边缘检测是计算机视觉领域中一种常用的图像处理技术,用于检测图像中的边缘信息。
边缘是指图像中灰度级发生突变的区域,通常表示物体的轮廓或对象的边界。
边缘检测在很多图像处理应用中起着重要的作用,如图像分割、目标检测、图像增强等。
基本原理边缘检测的基本原理是利用像素点灰度值的变化来检测边缘。
在数字图像中,每个像素点都有一个灰度值,范围通常是0到255。
边缘处的像素点灰度值变化较大,因此可以通过检测像素点灰度值的梯度来找到边缘。
常用算法1. Roberts算子Roberts算子是一种基于差分的边缘检测算法。
它通过计算相邻像素点之间的差值来检测边缘。
具体计算方式如下:1.将图像转换为灰度图像。
2.将每个像素点与其相邻的右下方像素点(即(i,j)和(i+1,j+1))进行差值计算。
3.将每个像素点与其相邻的右上方像素点(即(i,j+1)和(i+1,j))进行差值计算。
4.对上述两组差值进行平方和再开方得到边缘强度。
5.根据设定的阈值对边缘强度进行二值化处理。
2. Sobel算子Sobel算子是一种基于滤波的边缘检测算法。
它通过使用两个卷积核对图像进行滤波操作,从而获取图像中每个像素点的梯度信息。
具体计算方式如下:1.将图像转换为灰度图像。
2.使用水平和垂直方向上的两个卷积核对图像进行滤波操作。
3.将水平和垂直方向上的滤波结果进行平方和再开方得到边缘强度。
4.根据设定的阈值对边缘强度进行二值化处理。
3. Canny边缘检测算法Canny边缘检测算法是一种基于多步骤的边缘检测算法,被广泛应用于计算机视觉领域。
它在边缘检测的精度、对噪声的抑制能力和边缘连接性上都有很好的表现。
Canny算法的主要步骤包括:1.将图像转换为灰度图像。
2.对图像进行高斯滤波以减小噪声的影响。
3.计算图像的梯度和方向。
4.对梯度进行非极大值抑制,只保留局部极大值点。
5.使用双阈值算法进行边缘连接和边缘细化。
6.得到最终的边缘图像。
图像处理中的边缘检测方法与优化指南在图像处理领域中,边缘检测是一个重要的技术,它可以帮助我们识别图像中物体的边界以及其中的细节信息。
边缘检测的准确性直接影响着后续图像处理和分析的结果。
本文将介绍图像处理中的常用边缘检测方法,并探讨如何优化这些方法,以提高边缘检测的效果和鲁棒性。
一、常用边缘检测方法1. Sobel算子Sobel算子是一种经典的边缘检测方法,它基于图像中像素值的梯度变化来检测边缘。
Sobel算子分为水平和垂直两个方向,通过对图像进行卷积操作,分别得到水平和垂直方向上的梯度图像,然后通过对两个方向的梯度图像进行合并,得到最终的边缘图像。
Sobel算子简单易实现,对噪声具有一定的鲁棒性,但对细节信息的提取效果较弱。
2. Canny边缘检测Canny边缘检测是一种广泛应用的边缘检测方法,它不仅具有较高的准确性,而且能够有效抑制噪声。
Canny边缘检测基于多个步骤,包括高斯滤波、计算梯度和非最大抑制、确定双阈值以及边缘连接。
首先,通过高斯滤波平滑图像,减少噪声对边缘检测的干扰;然后,计算梯度图像和梯度方向,选择局部最大值作为边缘点;接着,通过双阈值将梯度图像中的强边缘和弱边缘分开,确定边缘点;最后,通过边缘连接将弱边缘点与强边缘点连接起来,形成完整的边缘图像。
3. Laplacian算子Laplacian算子是一种基于图像二阶导数的边缘检测方法,它能够提高对图像细节的检测效果。
Laplacian算子对图像进行二阶导数计算,然后根据二阶导数的变化来检测边缘。
由于Laplacian算子对噪声比较敏感,因此在应用前通常需要对图像进行平滑处理。
Laplacian算子能够检测到更多的边缘细节,但对噪声的响应较高,需要进行后续处理以提高边缘检测的准确性。
二、边缘检测方法的优化指南1. 参数选择边缘检测方法中的参数选择对于边缘检测的效果至关重要。
不同的图像和应用场景可能需要不同的参数设置。
因此,在使用边缘检测方法之前,需要根据具体情况选择合适的参数。
canny算子边缘检测原理
Canny算子是一种常用的边缘检测算法,其原理如下:
1. 高斯滤波:首先对图像进行高斯滤波,以减少噪声的影响。
高斯滤波是利用高斯函数对图像进行平滑操作,可以抑制高频噪声。
2. 计算梯度幅值和方向:对平滑后的图像进行梯度计算,通过计算像素点的梯度幅值和方向,可以找到图像中的边缘。
常用的梯度算子包括Sobel算子和Prewitt算子。
3. 非极大值抑制:在梯度图像中,对于每个像素点,通过比较其梯度方向上的两个相邻像素点的梯度幅值,将梯度幅值取最大值的点保留下来,其他点置为0。
这样可以剔除非边缘的像素。
4. 双阈值处理:将梯度幅值图像中的像素分为强边缘、弱边缘和非边缘三类。
设置两个阈值:高阈值和低阈值。
如果某个像素的梯度幅值大于高阈值,则将其标记为强边缘。
如果某个像素的梯度幅值小于低阈值,则将其剔除。
对于梯度幅值介于低阈值和高阈值之间的像素,如果其与某个强边缘像素相连,则将其标记为强边缘,否则将其标记为弱边缘。
5. 边缘连接:通过将强边缘和与其相连的弱边缘进行连接,找到完整的边缘。
这里通常使用8连通或4连通算法来判断两个像素是否相连。
通过以上步骤,Canny算子可以得到图像中的边缘信息,并且相对其他算法能够更好地抑制噪声和保持边缘的连续性。
数字图像处理中的边缘检测算法研究一、引言边缘检测在数字图像处理中是一个非常重要的问题,其主要任务是检测图像中物体的边缘信息,为后续的图像分割、目标跟踪、模式识别等处理提供基础。
目前,数字图像处理领域中常用的边缘检测算法主要包括基于梯度的算法、基于模板的算法和基于机器学习的算法,这些算法各有特点,适用于不同的应用场景。
本文将介绍几种经典的边缘检测算法及其特点,以期对数字图像处理领域的研究有所帮助。
二、基于梯度的边缘检测算法基于梯度的边缘检测算法是最为常见的一种边缘检测算法,其主要思路是通过对图像做梯度运算,来检测图像中的边缘信息。
经典的基于梯度的边缘检测算法包括Sobel算法、Prewitt算法、Roberts算法、Canny算法等。
下面我们将依次介绍这几种算法的特点及其优缺点。
1. Sobel算法Sobel算法是一种常见的基于梯度的边缘检测算法,其主要思想是对图像进行一阶梯度运算。
Sobel算子可以分为水平滤波器和垂直滤波器两个部分,分别用于检测图像中水平和垂直方向的边缘信息。
Sobel算法不仅能够提取较为精确的边缘信息,而且计算速度也较快,在实际应用中得到了广泛的应用。
2. Prewitt算法Prewitt算法也是一种基于梯度的边缘检测算法,其内核包括水平和垂直方向的两个模板。
与Sobel算法相比,Prewitt算法更加注重增强图像的垂直边缘信息,因此在一些需要检测线状目标的应用场景中,效果更加明显。
3. Roberts算法Roberts算法是一种基于梯度的边缘检测算法,它通过对图像做两阶梯度运算,来检测图像中的边缘信息。
Roberts算法在边缘检测的过程中可以检测到细节较为丰富的边缘,但是它所检测到的边缘信息相对于其他算法而言较为稀疏。
4. Canny算法Canny算法是一种经典的基于梯度的边缘检测算法,其主要思路是先将图像做高斯滤波,之后再计算图像的梯度值,通过非极大值抑制和双阈值分割等处理,最终得到准确的边缘信息。
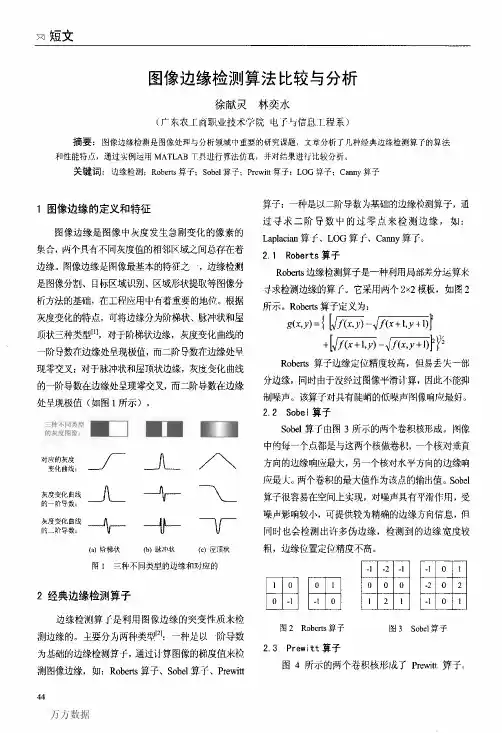
网短文图像边缘检测算法比较与分析徐献灵林奕水(广东农工商职业技术1学院电r与信息工程系)摘要:图像边缘检测是图像处理与分析领域中重要的研究课题,文章分析了几利-经典边缘检测算了的算法和性能特点,通过实例运用MATLABT具进行算法仿真,并对结果进{J:比较分析。
关键词:边缘检测;Roberts算子;Sobel算子;Prcwitt算子;LOG算子;Carmy算子1图像边缘的定义和特征图像边缘是图像中狄度发生急剧变化的像素的集合.曲个具有不同灰度值的相邻区域之间总存在着边缘。
罔像边缘是图像最基本的特征之,边缘检测是图像分割、目标区域识别、区域形状提取等图像分析方法的基础,在工程应用中有着重要的地位。
根据灰度变化的特点,可将边缘分为阶梯状、脉冲状和屋顶状三种类型【lj,对于阶梯状边缘,灰度变化曲线的一阶导数在边缘处呈现极值,而二阶导数在边缘处旱现零交叉;剥于脉冲状和屋顶状边缘,灰度变化曲线的一阶导数在边缘处呈现零交叉,而二阶导数在边缘处呈现极值(如图1所示)。
对辩墨√厂JL//,\变化曲线:——/——jL~\銎度裹些苎线——,_『\—一+——、L一的阶导数:—…L一:竺;i紫+—伊一—飞一『由一阶导数:VUVfal阶梯状fbl脉冲状(c)屋丁页状阿1三种不同类型的边缘和列应的2经典边缘检测算子边缘检测算,是利用图像边缘的突变性质米检测边缘的。
土要分为两种类犁闭:一种是以阶导数为基础的边缘检测算f,通过训算图像的梯度值米检测幽像边缘,如:Roberts算子、Sobel算予、Prewitt算子;一种是以二阶导数为基础的边缘榆测算子,通过寻求二阶导数L}J的过零点来检测边缘,如:Laplacian算f、LOG算f、Canny算了。
21Roberts算子Roberts边缘检测算子是一种利用局部差分运算术寻求检测边缘的算,。
它采用两个2x2模板,如图2所示。
Roberts算子定义为:g(W)={【√7i历一√7:百万面f+炒丽一痧丙而f严Roberts算子边缘定位精度较高,但易丢失一部分边缘,同时由于没经过图像-平滑计算,因此不能抑制噪声。
图像处理实验报告专业:姓名:学号:1几种边缘检测算子比较简单做了几组算子的边缘检测效果对比,包括几组梯度算子和二阶倒数算子。
这里简单记录一下Roberts算子、Sobel算子、Prewitt 算子、Log算子、Canny算子的运算原理与结果。
1.1Roberts算子Roberts算子是一种利用局部差分来寻找边缘的算子,Roberts 梯度算子所采用的是对角方向相邻两像素值之差,算子形式如下:Gx = f(i,j) - f(i-1,j-1)Gy = f(i-1,j) - f(i,j-1)|G(x,y)| = sprt(Gx^2+Gy^2)Roberts梯度算子对应的卷积模版为然后选择适当的阈值τ,若G ( x,y)>τ,则(i ,j)为边缘点,否则,判断(i ,j)为非边缘点。
由此得到一个二值图像{ g (i,j)},即边缘图像。
1.2Sobel算子Sobel算子在边缘检测算子扩大了其模版,在边缘检测的同时尽量削弱了噪声。
其模版大小为3×3,其将方向差分运算与局部加权平均相结合来提取边缘。
Sobel算子所对应的卷积模版为然后选择适当的阈值τ,若G ( x,y)>τ,则(i ,j)为边缘点,边缘定位精度不够高。
当对精度要求不是很高时,是一种较为常用的边缘检测方法。
1.3Prewitt 算子同Sobel 算子相似,Prewitt 算子也是一种将方向的差分运算和局部平均相结合的方法,也是取水平和垂直两个卷积核来分别对图像中各个像素点做卷积运算,所不同的是,Sobel 算子是先做加权平均然后再微分,Prewitt 算子是先平均后求微分,其对应的卷积模版为梯度幅值G ( x,y),然后选取适当的阈值τ,若G ( x,y)>τ,则(i ,j)为边缘点,否则,判断(i ,j)为非边缘点。
由此得到一个二值图像{ g (i,j)},即边缘图像。
1.4Log 算子Log算子基本思想是:先在一定的围做平滑滤波,然后再利用差分算子来检测在相应尺度上的边缘。

基于背景差法的视频车辆分割算法研究摘要:在交通监控系统中,实现车辆的准确检测是关键技术,其中车辆的分割与提取是至关重要的。
本文在车辆分割中对四种边缘检测微分算子进行比较,实验结果表明Canny算子去噪能力强、边缘定位精度准确、不易被噪声填充,效果最好。
关键词:视频车辆分割边缘检测微分算子1 引言边缘检测技术是所有基于图像分割方法最基本的处理,对于处理数字图像非常重要。
图像的边缘是图像的最基本特征,图像的边缘部分集中了图像大部分的信息,是所要提取目标和背景的分界线,提取出边缘才能将目标与背景区分开来,因此它是图像分割所依赖的重要特征。
2 常用的边缘检测微分算子常用的边缘检测微分算子有Sobel、Robert、LOG、Canny,下面对这几种算子进行介绍。
2.1 Sobel算子Sobel算子是边缘检测比较常用的一种算子。
该算子包含两组3×3的矩阵,分别为横向及纵向,一个是检测水平边缘的模板,另一个是检测垂直边缘的模板。
由于Sobel算子是滤波算子的形式,简单有效,应用较广泛。
同时对噪声具有一定的抑制能力,但这种抗噪能力是通过平均像素来实现的,所以图像产生一定的模糊,还会检测出一些伪边缘,所以检测精度较低,因此比较适用于图像边缘灰度值比较尖锐,且图像噪声比较小的情况。
2.2 Robert由于Roberts算子是利用图像的两个对角线的相邻像素之差进行梯度幅值的检测,所以求得的是在差分点处梯度幅值的近似值,处理后的结果边缘不是很平滑,并且检测水平和垂直方向边缘的性能好于斜线方向的边缘,同时由于没经过图像平滑计算,对噪声敏感,因此该算子适用于边缘明显且噪声较少的图像分割。
2.3 LOG(Laplacian-Gauss)算子在二维空间中,常用的二阶导数算子是Laplacian算子。
但是这种算子边缘的方向信息被丢失而且是二阶差分算子,因此双倍加强了图像噪声的影响。
由于图像强度二阶导数的零交叉点求边缘点算法对噪声十分敏感,为了消除噪声影响将高斯滤波器和Laplacian边缘检测结合在一起,形成了LOG算法。
基于MATLAB边缘检测与提取的几种方法的比较数字图像边缘检测(Digital Image Processing)又称为计算机图像边缘检测,它是指将图像信号转换成数字信号并利用计算机对其进行处理的过程。
由于图像边缘是图像最基本的特征之一,往往携带着一幅图像的大部分信息。
而边缘存在于图像的不规则结构和不平稳现象中,也即存在于信号的突变点处,这些点给出了图像轮廓的位置,这些轮廓常常是我们在图像边缘检测时所需要的非常重要的一些特征条件,这就需要我们对一幅图像检测并提取出它的边缘。
在通常情况下,我们可以将信号中的奇异点和突变点认为是图像中的边缘点,其附近灰度的变化情况可从它相邻像素灰度分布的梯度来反映。
根据这一特点,提出了多种边缘检测算子:如Robert算子、Sobel 算子、Prewitt 算子、Laplacian 算子,Canny算子等。
这些方法多是以待处理像素为中心的邻域作为进行灰度分析的基础,实现对图像边缘的提取并已经取得了较好的处理效果。
经典的边界提取技术大都基于微分运算。
首先通过平滑来滤除图像中的噪声,然后进行一阶微分或二阶微分运算,求得梯度最大值或二阶导数的过零点,最后选取适当的阈值来提取边界。
本文主要介绍几种经典的边缘提取算法,选取两种用MATLAB语言编程实现,对提取结果进行比较和分析。
图像边缘检测的基本步骤:(1)滤波。
边缘检测主要基于导数计算,但受噪声影响。
但滤波器在降低噪声的同时也导致边缘强度的损失。
(2)增强。
增强算法将邻域中灰度有显著变化的点突出显示。
一般通过计算梯度幅值完成。
(3)检测。
但在有些图像中梯度幅值较大的并不是边缘点。
最简单的边缘检测是梯度幅值阈值判定。
(4)定位。
精确确定边缘的位置。
几种边缘算子的比较以柚子的图片为例1、Roberts算子是一种利用局部差分算子寻找边缘的算子,Roberts算子边缘定位准,但是对噪声敏感。
适用于边缘明显而且噪声较少的图像分割,在应用中经常用Roberts算子来提取道路。
边缘检测是计算机视觉和图像处理中的一项重要任务,它用于识别图像中物体的边界或不同区域之间的边缘。
边缘检测算法通过检测图像中像素强度的快速变化来工作。
以下是一些常用的边缘检测算法:Sobel算子:Sobel边缘检测算法是一种基于一阶导数的离散微分算子,它结合了高斯平滑和微分求导。
Sobel算子对噪声具有平滑作用,提供较为精确的边缘方向信息,但边缘定位精度不够高。
当对精度要求不是很高时,是一种较为常用的边缘检测方法。
Prewitt算子:Prewitt算子是一种一阶微分算子的边缘检测,利用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用。
其原理是在图像空间利用两个方向模板与图像进行邻域卷积来完成的,这两个方向模板一个检测水平边缘,一个检测垂直边缘。
Canny算子:Canny边缘检测算法是John F. Canny于1986年开发出来的一个多级边缘检测算法。
Canny的目标是找到一个最优的边缘检测算法,最优边缘检测的含义是:好的检测- 算法能够尽可能多地标识出图像中的实际边缘,漏检真实边缘的情况和误检非边缘轮廓的情况都最少。
Laplacian算子:Laplacian算子是一种二阶导数算子,具有旋转不变性,可以满足不同走向的图像边缘锐化要求。
通常其算子的系数之和需要为零。
由于拉普拉斯算子对噪声比较敏感,所以图像一般先经过平滑处理,因为平滑处理会用到拉普拉斯算子,所以通常将平滑处理的过程和拉普拉斯锐化处理的过程合并在一起做,此时平滑处理的滤波器又称为掩模。
Roberts算子:Roberts算子又称为交叉微分算法,它是基于2x2的邻域计算差分的方法。
Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。
这些算法各有优缺点,选择哪种算法取决于具体的应用场景和需求。
例如,Canny算子通常被认为是边缘检测的最优算法,但它在计算上可能比Sobel或Prewitt算子更复杂。
边缘检测算法的比较分析摘要:边缘检测在图像处理中占要重要的地位,边缘检测的算法选择直接影响到整个计算机视觉系统性能的好坏,寻找比较简单的算法、对边缘检测精度并与抗噪性能协调的算法起着重要作用,是图像处理领域的热点。
关键词:计算机视觉边缘检测边缘是不同区域的分界线,是图像局部强度变化最显著的那些像素的集合也是图像最基本的特征[1]。
是其周围像素灰度有阶跃性变化或屋顶变化的集合。
不同的灰度值的相邻区域之间边缘总是存在的。
边缘检测技术是图像处理中最基础的技术,快速精确的提取图像边缘信息是该领域研究的热点,实际景物图像常常是各种类型的边缘及其模糊化结合的组合。
原始图像住住含有噪声给边缘检测带来困难。
1 边缘检测以原始图像为基础,对图像的每个像素对它的某个领域内灰度阶跃变化,利用边缘增强算子,突出局部边缘,提取边缘点集。
利用边缘邻近一阶或二阶方向导数变化规律检测边缘。
常用的边缘检测方法有:高斯-拉普拉斯(LOG)算子、Roberts算子、Prewitt算子、Sobel算子、Canny算子等。
1.1 Roberts算子Roberts算子是最简单的一种边缘检测算子,采用对角线方向相邻两像素之差进行梯度幅度检测,检测水平和垂方向边缘的性能好于斜线方向,并且检测定位精度比较高,但对噪声较体敏感。
是一种利用局部差分算子寻找边缘的算子,具有整数像素坐标的输入图像。
1.2 Sobel算子可产生较好的检测效果,是综合图像每个像素点的上下左右邻点灰度的加权和,接近模板中心的权值较大,可以产生较好的边缘效果,对噪声有平滑作用,抗噪声县增加计算量,提供较为精确的边缘方向信息。
该方法是对于精度不高要求不高时较为常用的方法。
1.3 Prewitt算子Prewitt算子是一种边缘样板算子,也是一种一阶微分算子。
样板算子由理想的边缘子图像构成,用边缘样板去检测图像,与被检测区域最为相似的样板给出最大值,并作为算子的输出。
1.4 LOG算子用高斯函数对图像作平滑滤波处理,然后用Laplacian算子检测边缘,抑制噪声的同时也可能将原有的比较尖锐的边缘平滑掉了,对去除常见于CT图像中的正态分布噪声很有效,为了减少噪声影响,可先对待处理图像进行平滑,然后用拉普拉斯算子检测边缘,它是对于二元函数的二阶导数算子,对应的过零点就是边缘位置,算子强调图像灰度的突变,能增强细节信息,有锐化效果。
图像处理中的边缘检测算法及其应用一、引言图像处理是指利用计算机对数字图像进行编辑、处理和分析的过程,具有广泛的应用领域。
在图像处理中,边缘检测是一项最为基础的任务,其目的是通过识别图像区域中像素强度突变处的变化来提取出图像中的边缘信息。
本文将介绍边缘检测算法的基本原理及其应用。
二、基本原理边缘是图像中像素值发生跳变的位置,例如黑色区域与白色区域的交界处就可以看作是一条边缘。
边缘检测的主要任务是将这些边缘信息提取出来。
边缘检测算法一般可以分为基于梯度的算法和基于二阶导数的算法。
其中基于梯度的算法主要包括Sobel算子、Prewitt算子和Canny算子;而基于二阶导数的算法主要包括Laplacian算子、LoG(Laplacian of Gaussian)算子和DoG(Difference of Gaussian)算子。
1.Sobel算子Sobel算子是一种常用的边缘检测算法,是一种基于梯度的算法。
该算法在x方向和y方向上都使用了3x3的卷积核,它们分别是:Kx = |-2 0 2|-1 0 1-1 -2 -1Ky = | 0 0 0|1 2 1Sobel算子的实现可以通过以下步骤:①将输入图像转为灰度图像;②根据以上卷积核计算x方向和y方向的梯度;③根据以下公式计算梯度幅值和方向:G = sqrt(Gx^2 + Gy^2) (梯度幅值)θ = atan(Gy/Gx) (梯度方向)其中Gx和Gy分别为x方向和y方向上的梯度。
可以看到,Sobel算子比较简单,对噪声具有一定的抑制作用,但是在边缘细节处理上不够精细。
2.Prewitt算子Prewitt算子也是一种基于梯度的边缘检测算法。
其卷积核如下: -1 0 1-1 0 1-1 -1 -1Ky = | 0 0 0|1 1 1实现方法与Sobel算子类似。
3.Canny算子Canny算子是一种基于梯度的边缘检测算法,是目前应用最广泛的边缘检测算法之一。
log边缘检测方法的原理
1边缘检测原理
边缘检测是应用于图像处理中的一种技术,目的是在图像中检测出两个不同物体的边界部分,也就是边缘或轮廓的形状。
边缘检测可以用来对图像的对象进行分类和抽取,它也是很多其他图像处理技术的基础技术。
边缘检测常见的方法有Canny边缘检测(Canny edge
detection)和Sobel边缘检测(Sobel edge detection)。
它们都是基于运动和梯度变化来检测边缘的。
Canny边缘检测是以不同形式计算梯度来发现边缘的,而Sobel边缘检测是直接用梯度滤波器(如拉普拉斯滤波器)直接对图像进行滤波,然后从滤波后的图像中检测出边缘。
最近出现的一种新的边缘检测方法叫做Laplacian特征选择(Laplacian Feature Selection),也叫做LoG边缘检测(LoG Edge Detection)。
这种方法使用拉普拉斯算子(Laplacian Operator)来计算图像的梯度,然后将图像梯度变化曲线和梯度方向进行计算,来寻找边缘,实现边缘检测。
LoG边缘检测和之前的Canny和Sobel技术相比,准确度更高,速度更快,并且具有很好的鲁棒性,能够自动的抗噪,改善图像的噪声问题。
它在自然图像处理、医学图像处理等领域中都有广泛的应用。
LoG边缘检测的原理是,先通过计算二阶导数的幅值和极大值,然后在领域中进行局部匹配,以判断像素点是否为边缘点。
边缘检测是基于梯度方向、梯度幅值来完成的,通过比较梯度值的大小和方向,从而消除多余的噪声点,提高边缘检测的准确度,得到清晰的边缘检测结果。
因此,LoG边缘检测是一种准确、稳健、鲁棒性强的图像处理技术,在许多领域有广泛的应用。