从ADS到RealViewMDK_上_
- 格式:pdf
- 大小:637.49 KB
- 文档页数:3
STM32入门系列教程如何安装RealView MDK软件Revision0.01(2010-04-16)考虑到大多数同学都是从单片机过渡到STM32,因此我们将采用MDK作为我们STM32的调试软件。
该软件的界面为KEIL界面,对很多熟悉51的朋友来说,绝对能够轻松上手。
本期教程将讲述如何安装MDK软件。
打开芯达STM32光盘,在“软件工具”目录下,即可看见:双击打开后,可找到MDK3.80a版本。
可能有同学会有疑问,现在最新版本已经都到MDK4.11了,为啥还用3.80版本呢?经过高手前辈的经验确认,发现兼容性最好的,还是MDK3.80a,因此本期教程采用该版本来讲解,以后所有的教程、例程均采用MDK3.80A,不再重复说明。
如下右图所示,双击它。
出现如下窗口,直接点击“Next”进入下一步。
在出现的窗口中,选中I agree to all…,再点击Next,进入下一步。
接着选择你要安装的目录,笔者在这里直接默认安装在C盘下的keil目录中,然后点击Next。
下面填写你的姓(First Name)和电子邮件地址。
填写英文名字,以及电子邮件地址。
然后点击Next进入下一步。
接着系统进入安装界面,这个过程根据电脑配置的不同,可能需要几十秒至几分钟不等的时间,请耐心等待。
安装完成后,进入如下界面:这时,要选择一个工程例程,笔者这里选择了CQ-STM32的目标板的例程。
实际上,这一步不是必要的,大家也可以选择其他例程,例程供参考而已。
然后点击“Finish”,即可安装完成。
现在回到桌面,就可以看到多了一个图标:因为我们刚才安装的是MDK3.80a版本,属于Keil uVision3,因此图标上显示Keil uVision3的字样。
如果安装的是MDK4.11版本,则图标下显示的是Keil uVision4。
OK,软件安装完毕,这就表明我们安装成功了吗?NO!我们还需要激活它。
笔者建议使用正版软件,合法获取授权文件及序列号。
介绍RVMDK开发板拿到手之后,不要浪费时间,第一步就要建立一个学习平台。
一个好学习平台很重要,在不同程度上提高了我们的学习效率。
此外,养成良好的资料整理能力,让工程构造,文档资料清晰明了。
编译软件:RealView MDK-ARM 4.12,简称MDK或KEIL相信大多数读者是从51单片机那接着学过来的,对于KEIL C51的熟悉程序就不用说了。
刚接触新的事物,找点熟悉的来增强信心很重要。
用IAR的人也不少,两者的区别不大。
在这里,我们建议你先熟悉使用MDK.调试软件:JLINK V8拥有一个调试软件来学习,效率会快很多。
除了让我们更容易地找出代码的错误之处,还能让我们越来越熟悉STM32的内部寄存器。
有ST LINK的同学用ST LINK也行。
这里我们选择SEGGER公司JLINK,理由很简单:便宜。
接着我们用MDK来构建一个工程,貌似一些新手会觉得麻烦。
在后面的程序中,我们将一直沿用这种结构的工程,但不必每次都经历繁琐的建立过程。
在你想要的位置建立以下文件夹:Code(文件夹)Libraries(文件夹)-CMSIS(文件夹)-STM32F10x_StdPeriph_Driver(文件夹)Obj(文件夹)Utilities(文件夹)-Common-STM3Fire_Bull打开MDK, New Vision Project, 选择工程模板文件夹中,输入Project,CPU的选型STMicroelectronics—>STM32F103VC(按实际芯片类型来选,你不是这个就选别的)接着会弹出如下对话框:启动代码是一段和硬件相关的汇编代码.是必不可少的!这代码具体如何工作的,这个我们不必太关心,感兴趣的朋友可以去研究下。
在弹出的选择是否添加启动代码的窗口,我们选否,因为我们在后面会选择使用ST官方提供的启动代码。
启动代码是根据芯片类型来决定的,工程里包含了两个启动代码的话,编译会出事。
ARM仿真器ULINK2 + RealView MDK 开发套件ULINK2仿真器ULINK2是ARM公司最新推出的配套RealView MDK使用的仿真器,是ULink仿真器的升级版本。
ULINK2不仅具有ULINK仿真器的所有功能,还增加了串行调试(SWD)支持,返回时钟支持和实时代理等功能。
开发工程师通过结合使用RealView MDK的调试器和ULINK2,可以方便的在目标硬件上进行片上调试(使用on-chip JTAG,SWD和OCDS)、Flash编程。
ULINK2 新特点标准Windows USB驱动支持ULINK2即插即用支持基于 ARM Cortex-M3的串行调试支持程序运行期间的存储器读写、终端仿真和串行调试输出支持10-pin 连接线(也支持20-pin 连接线)ULINK2主要功能:USB通讯接口高速下载用户代码存储区域/寄存器查看快速单步程序运行多种程序断点片内Flash编程ULINK2技术参数特性RAM 断点UnlimitedROM断点(ARM7/9) 2 maxROM断点(Cortex-M3) 6 maxExecution断点(Set While Executing)√Access断点(ARM7/9) 2 max (R/W Only,With Value)Access 断点(Cortex-M3)4 max (With Value) Trace History× Real-Time Agent√ JTAG 时钟<= 10MHz JTAG RTCK 支持(Return Clock)√Memory R/W(Bytes/sec)≈28K Flash R/W(Bytes/sec)≈25K Single-Step(Fast)(Instructions/sec) ≈50ULINK2支持的处理器【ARM7/ARM9/Cortex-M3】LPC2101, LPC2102, LPC2103, LPC2104, LPC2105, LPC2106, LPC2114, LPC2119,LM3S101, LM3S102, LM3S301, LM3S310, LM3S315, LM3S316, LM3S328,S3C2410A, S3C2440A, S3C44B0X, S3C4510BAT91C140, AT91F40416, AT91F40816, AT91FR40162, AT91FR4042, AT91FR4081,STR710FZ1, STR710FZ2, STR711FR0, STR711FR1, STR711FR2, STR712FR0,ADuC7019, ADuC7020, ADuC7021, ADuC7022, ADuC7024, ADuC7025, ADuC7026,ADuC7027, ADuC7032, ADuC7033, ADuC7128, ADuC7129MAC7101, MAC7104, MAC7105, MAC7106, MAC7111, MAC7112, MAC7114,MAC7115, MAC7116, MAC7121, MAC7122, MAC7124, MAC7125, MAC7126,ML674000, ML674001, ML674002, ML674003, ML675001, ML675002, ML675003,ML67Q4050, ML67Q4051, ML67Q4060, ML67Q4061, ML696201, ML69Q6203 TMS470R1A128, TMS470R1A256, TMS470R1A288, TMS470R1A384,TMS470R1A64, TMS470R1B1M, TMS470R1B512, TMS470R1B768MAC7101, MAC7104, MAC7105, MAC7106, MAC7111, MAC7112, MAC7114,MAC7115, MAC7116, MAC7121, MAC7122, MAC7124, MAC7125, MAC7126,MAC7131, MAC7134, MAC7135, MAC7136, MAC7141, MAC7142, MAC7144ML674000, ML674001, ML674002, ML674003, ML675001, ML675002, ML675003,ML67Q4050, ML67Q4051, ML67Q4060, ML67Q4061, ML696201, ML69Q6203TMS470R1A128, TMS470R1A256, TMS470R1A288, TMS470R1A384,TMS470R1A64, TMS470R1B1M, TMS470R1B512, TMS470R1B768RealView MDK开发套件RealView MDK开发套件源自德国Keil公司,是ARM公司目前最新推出的针对各种嵌入式处理器的软件开发工具。

1.1.RVMDK简介RVMDK源自德国的KEIL公司,是RealView MDK的简称,RealView MDK集成了业内最领先的技术,包括μVision4集成开发环境与 RealView编译器。
支持ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备模拟,性能分析等功能,与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
1.2.MDK 4.12集成开发环境的组成MDK又称叫RVMDK,源自德国的KEIL公司,是RealView MDK的简称,RealView MDK 集成了业内最领先的技术,包括μVision4集成开发环境与 RealView编译器。
支持ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备模拟,性能分析等功能,与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
1.3.MDK工程的编辑1.3.1.新建RVMDK工程1)点击WINDOWS操作系统的【开始】Æ【程序】Æ【Keil uVision4】启动Keil uVision 或在桌面双击【Keil uVision4】快捷方式启动。
启动MDK4.12如图所示:2)点击之后,出现启动画面:1)点击“project---New uVision Project”新建一个工程2)在对话框,选择放在刚才建立的“新建文件夹”下,给这个工程取个名后保存,不需要填后缀:3)弹出一个框,在CPU类型下我们找到并选中“STMicroelectronics”下的STM32F103RB:4)出现一个提示框,是否复制STM32启动代码到工程文件夹,我们选择【是】,就可以看到STM32的启动代码自动添加进来了:5)到这里工程全部建立完毕1.3.2.建立文件建立一个文本文件,以便输入用户程序。
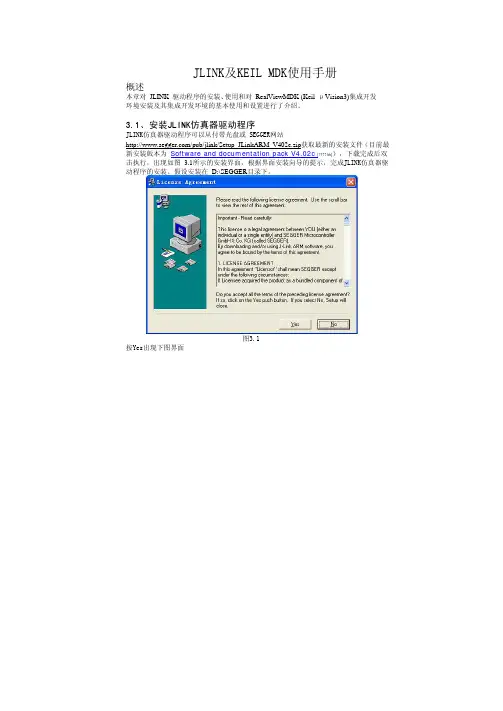
JLINK及KEIL MDK使用手册概述本章对 JLINK 驱动程序的安装、使用和对 RealViewMDK (Keil μVision3)集成开发环境安装及其集成开发环境的基本使用和设置进行了介绍。
3.1、安装JLINK仿真器驱动程序JLINK仿真器驱动程序可以从付带光盘或 SEGGER网站/pub/jlink/Setup_JLinkARM_V402c.zip获取最新的安装文件(目前最新安装版本为 Software and documentation pack V4.02c [7177 kb]),下载完成后双击执行,出现如图 3.1所示的安装界面,根据界面安装向导的提示,完成JLINK仿真器驱动程序的安装。
假设安装在 D:\SEGGER目录下。
图3.1按Yes出现下图界面图3.2 按Next继续下一步操作图3.3选择安装目录后按Next继续下一步图3.4如果你还在以前装了IAR的集成开发环境将出现下面图3.5的提示,提示你选择更新IAR 下的JLINK仿真器的动态链接库文件,一般选上后按OK完成JLINK仿真器的安装。
图3.53.2、如何使用JLINK仿真器软件3.2.1、使用J-FLASH ARM 烧写程序到芯片FLASH运行J-FLASHARM 出现图3.6图3.6 进行烧写前的必要设置如:图3.7图3.7选择MINI-STM32开发板的CPU型号,选择完成后按确定退出设置。
图3.8设置完成后左边显示烧写信息图3.9连接目标板,连上后会有提示信息,见下边的状态拦。
图3.10连接成功后如图3.11图3.11接着File->open打开烧录文件,如图3.12图3.12加载完成后选择Target->Auto或快捷键F7进行自动烧录。
图3.13烧写状态,图3.14图3.14 烧写成功,图3.15图3.15关于J-FLASH ARM更详细的操作请参阅JLINK的用户手册。
3.2.2、使用J-Link command设置和查看相关调试信息J-Link command包含了所有设置和查看相关调试信息的命令,J-Link command基于命令行输入方式。
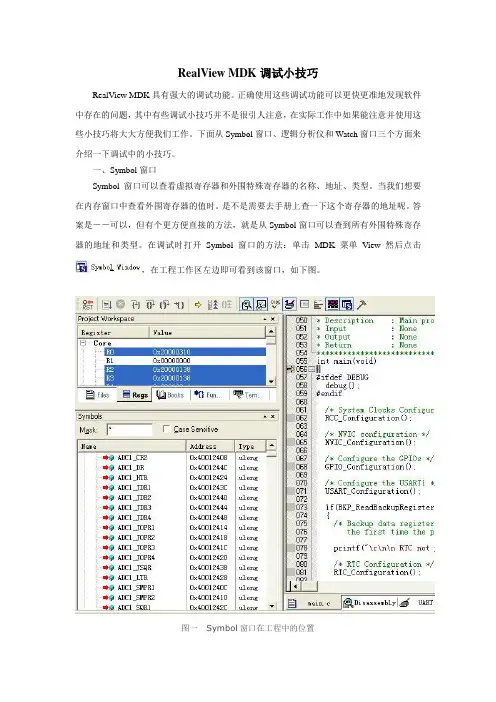
RealView MDK调试小技巧RealView MDK具有强大的调试功能。
正确使用这些调试功能可以更快更准地发现软件中存在的问题,其中有些调试小技巧并不是很引人注意,在实际工作中如果能注意并使用这些小技巧将大大方便我们工作。
下面从Symbol窗口、逻辑分析仪和Watch窗口三个方面来介绍一下调试中的小技巧。
一、Symbol窗口Symbol窗口可以查看虚拟寄存器和外围特殊寄存器的名称、地址、类型。
当我们想要在内存窗口中查看外围寄存器的值时。
是不是需要去手册上查一下这个寄存器的地址呢。
答案是――可以,但有个更方便直接的方法,就是从Symbol窗口可以查到所有外围特殊寄存器的地址和类型。
在调试时打开Symbol窗口的方法:单击MDK菜单View然后点击,在工程工作区左边即可看到该窗口,如下图。
图一Symbol窗口在工程中的位置二、逻辑分析仪逻辑分析仪可以跟踪全局变量、虚拟寄存器和外围特殊寄存器的值。
1、我们可能需要将IO端口的数据寄存器某位的值在逻辑分析仪上显示出来。
一种方法是在逻辑分析仪的Setup对话框里通过Mask来屏蔽那些不需要显示的位。
还有一种更简单的方法,就是在寄存器名后面加上后缀“.位序”。
比如A口有16个引脚。
其对应的数据寄存器为PORTA(16位)。
现在需要跟踪引脚7的值。
则只需添加信号PORTA.7即可,系统会自动设置Mask值。
实际上,任何跟踪的信号,只要是整型数据都能使用上面提供的方法。
这对于位显示非常直观,简捷。
2、当我们需要在逻辑分析仪中显示Symbol窗口中列出的虚拟寄存器和外围特殊寄存器的值时,没必要在Setup对话框中写出该信号的名称。
只需将Symbol窗口的寄存器名直接拖到逻辑分析仪中即可。
三、Watch窗口Watch窗口可以查看程序中全局变量的值并实时更新。
也可查看外围特殊寄存器和虚拟寄存器的值。
我们可以在Watch窗口中按F2然后将变量名敲进去,回车就可看到该变量的值,但更方便的方法是可以直接将选中的该变量或寄存器名直接拖到Watch窗口中。
ARM仿真器ULINK2 + RealView MDK 开发套件ULINK2仿真器ULINK2是ARM公司最新推出的配套RealView MDK使用的仿真器,是ULink仿真器的升级版本。
ULINK2不仅具有ULINK仿真器的所有功能,还增加了串行调试(SWD)支持,返回时钟支持和实时代理等功能。
开发工程师通过结合使用RealView MDK的调试器和ULINK2,可以方便的在目标硬件上进行片上调试(使用on-chip JTAG,SWD和OCDS)、Flash编程。
ULINK2 新特点标准Windows USB驱动支持ULINK2即插即用支持基于 ARM Cortex-M3的串行调试支持程序运行期间的存储器读写、终端仿真和串行调试输出支持10-pin 连接线(也支持20-pin 连接线)ULINK2主要功能:USB通讯接口高速下载用户代码存储区域/寄存器查看快速单步程序运行多种程序断点片内Flash编程ULINK2技术参数特性RAM 断点UnlimitedROM断点(ARM7/9) 2 maxROM断点(Cortex-M3) 6 maxExecution断点(Set While Executing)√Access断点(ARM7/9) 2 max (R/W Only,With Value)Access 断点(Cortex-M3)4 max (With Value) Trace History× Real-Time Agent√ JTAG 时钟<= 10MHz JTAG RTCK 支持(Return Clock)√Memory R/W(Bytes/sec)≈28K Flash R/W(Bytes/sec)≈25K Single-Step(Fast)(Instructions/sec) ≈50ULINK2支持的处理器【ARM7/ARM9/Cortex-M3】LPC2101, LPC2102, LPC2103, LPC2104, LPC2105, LPC2106, LPC2114, LPC2119,LM3S101, LM3S102, LM3S301, LM3S310, LM3S315, LM3S316, LM3S328,S3C2410A, S3C2440A, S3C44B0X, S3C4510BAT91C140, AT91F40416, AT91F40816, AT91FR40162, AT91FR4042, AT91FR4081,STR710FZ1, STR710FZ2, STR711FR0, STR711FR1, STR711FR2, STR712FR0,ADuC7019, ADuC7020, ADuC7021, ADuC7022, ADuC7024, ADuC7025, ADuC7026,ADuC7027, ADuC7032, ADuC7033, ADuC7128, ADuC7129MAC7101, MAC7104, MAC7105, MAC7106, MAC7111, MAC7112, MAC7114,MAC7115, MAC7116, MAC7121, MAC7122, MAC7124, MAC7125, MAC7126,ML674000, ML674001, ML674002, ML674003, ML675001, ML675002, ML675003,ML67Q4050, ML67Q4051, ML67Q4060, ML67Q4061, ML696201, ML69Q6203 TMS470R1A128, TMS470R1A256, TMS470R1A288, TMS470R1A384,TMS470R1A64, TMS470R1B1M, TMS470R1B512, TMS470R1B768MAC7101, MAC7104, MAC7105, MAC7106, MAC7111, MAC7112, MAC7114,MAC7115, MAC7116, MAC7121, MAC7122, MAC7124, MAC7125, MAC7126,MAC7131, MAC7134, MAC7135, MAC7136, MAC7141, MAC7142, MAC7144ML674000, ML674001, ML674002, ML674003, ML675001, ML675002, ML675003,ML67Q4050, ML67Q4051, ML67Q4060, ML67Q4061, ML696201, ML69Q6203TMS470R1A128, TMS470R1A256, TMS470R1A288, TMS470R1A384,TMS470R1A64, TMS470R1B1M, TMS470R1B512, TMS470R1B768RealView MDK开发套件RealView MDK开发套件源自德国Keil公司,是ARM公司目前最新推出的针对各种嵌入式处理器的软件开发工具。
RealView MDK中国版开发套件介绍支持情况Demo版大众版企业版专业版功能ARM MCUsARM7/ARM9Cortex-M3/M1ARM7/ARM9ARM7/ARM9Cortex-M3/M1ARM7/ARM9Cortex-M3/M1编译器ARM7/916K无限制无限制无限制编译器 M3/M116K16K256K无限制编译优化级别000,1,2,30,1,2,3模拟器16K无限制无限制无限制帮助文档中文中文中文中文仿真器ULINK2支持16K无限制无限制无限制产品服务软件升级无一年一年一年论坛支持支持支持支持E-mail无支持支持支持电话无支持支持支持国内统一售价大学用户价格另有优惠¥2500*¥4600*¥8000**以上各版本价格均已包含ULINK2仿真器-------------------------------------------------------------------------------------------------------菜鸟的阿拉伯飞毯 —— 启动代码生成向导高手的无剑胜有剑 —— 软件模拟器专家的哈雷望远镜 —— 性能分析器未来战士的激光剑—— Cortex-M3支持©2008 MXCHIP Corporation. All rights reservedRealView Microcontroller Development Kit(RealView MDK)开发套件--中国版RealView MDK开发工具源自德国Keil公司,被全球超过10万的嵌入式开发工程师验证和使用,是ARM公司目前最新Array推出的针对各种嵌入式处理器的软件开发工具。
RealViewMDK集成了业内最领先的技术,包括µVision3集成开发环境与 RealView编译器。
支持ARM7、ARM9和最新的Cortex-M3核处理器,自动配置启动代码,集成Flash烧写模块,强大的Simulation设备模拟,性能分析等功能,与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
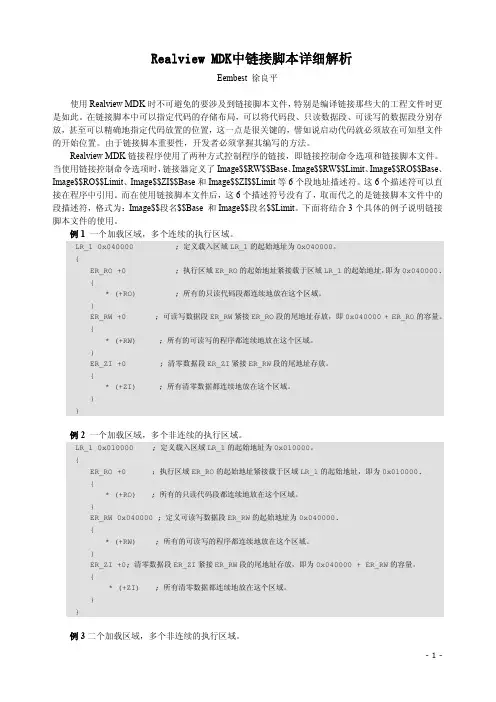
Realview MDK中调试脚本的详细解析和其他集成开发环境一样,Realview MDK中也使用了调试脚本。
调试脚本除了可以初始化软硬件的调试环境以外,还可以初始化Flash的烧写环境,甚至可以提供信号函数模拟片上外围设备。
所以在使用Realview MDK调试和烧写的过程中,到处都有调试脚本的身影。
下面将分三个方面详细地研究调试脚本的编写和使用。
在介绍调试脚本之前,先必须了解Realview MDK预定义的一些常用命令和函数的用法。
1.常用预定义命令的说明及注意事项:2.调试脚本在硬件仿真中的应用Realview MDK编译链接好的程序在硬件上运行之前,要求硬件具有合适的环境(例如,时钟的配置、存储控制的配置等),一般这些工作是由启动代码完成的。
在Realview MDK中,通过调试脚本使用MDK 预先定义好的寄存器读写命名设置硬件环境。
这一工作在硬件调试之前是必须进行的。
下面是一个初始化硬件环境的调试脚本函数:FUNC void Setup(void){_WWORD(0xfffffd44,0x00008000);//配置看门狗模式寄存器;_WWORD(0xfffffd60,0x00320100);//配置电压效验模式寄存器;_WWORD(0xfffffc20,0x00000601);//配置主晶振寄存器;_WWORD(0xfffffc2c,0x00191C05);//配置锁相环寄存器;_WWORD(0xfffffc30,0x00000007);//配置主时钟寄存器;_WWORD(0xfffffd08,0xa5000001);//配置复位控制模式寄存器;pc=0x200000;//设置PC的值。
}3.调试脚本在软件仿真调试中的应用使用Realview MDK软件模拟器调试程序时,除了像硬件调试那样配置相关的寄存器以外,有时还必须使用信号函数模拟外设信号的输入/输出,甚至完全模拟一个外围设备。
KEIL工程建立步骤KEIL MDK开发工具源自德国Keil 公司,被全球超过10万的嵌入式开发工程师验证和使用,是ARM公司目前最新推出的针对各种嵌入式处理器的软件开发工具。
KEIL MDK集成了业内最领先的技术,包括µVision4集成开发环境与RealView编译器。
支持ARM7、ARM9和最新的Cortex-M3/M1/M0 内核处理器,自动配置启动代码,集成Flash 烧写模块,强大的Simulation设备模拟,性能分析等功能,与ARM之前的工具包ADS等相比,RealView编译器的最新版本可将性能改善超过20%。
KEIL MDK出众的价格优势和功能优势,已经成为ARM软件开发工具的标准,目前,KEIL MDK在国内ARM开发工具市场已经达到90%的占有率。
使用MDK前当然要先把KEIL MDK安装好。
读者首先要从/下载到最新的KEIL MDK,笔者使用的是KEIL MDKV4.13a。
下载完毕之后双击开始安装。
首先看到欢迎界面:点击Next,勾选安装协议:下一步,选择安装路径(笔者因硬盘空间不足安装在E盘,但若读者硬盘资源充裕,则建议安装在C盘,跑起来快些):下一步,填写用户信息,个人用户随意填入即可:点击Next 就进入实质的安装过程啦,Wait for a Whle… …很快安装完毕,看到2 个可选项:1、保持当前uVision 的设置。
2、载入以下选择的工程实例,默认即可。
点击Next,来到最后一个安装界面:1.是否安装ULINK Pro Driver V1.0驱动?2.是否显示软件发布说明?读者可以按照自己的需求勾选。
点击Finish,KEIL MDK就完成安装了,可以发现桌面上生成了名为“Keil uVision4”的可执行文件快捷方式。
双击“Keil uVision4”图标打开Keil uVision4开发环境,此时Keil uVision4会自动载入一个工程项目(依安装的倒数第二步勾选而定),我们就此可以简单地看看KEIL MDK 的用户界面。
Realview MDK 中编译器对中断处理的过程详解
在ARM 程序的开发过程中,对中断的处理是很普遍的、也是相当重要的。
Realview MDK 使用的RVCT 编译器提供了__irq 关键字,用此关键字修饰的函数被作为中断出来函数编译,即在编译的过程中,编译器会自动添加中断处理
过程中现场保护和恢复的代码,减小程序的开发难度,加快软件的开发过程。
在理解__irq 关键字的作用之前,先看一下ARM 核对异常的处理过程。
当产生
异常时, ARM 核拷贝CPSR 寄存器的内容SPSR_寄存器中,同时设置适当的CPSR 位、改变处理器状态进入ARM 态和处理器模式,从而进入相应的异常模式。
在设置中断禁止位禁止相应中断(如果需要)后,ARM 核保存返回地址到LR_,同时设置PC 为相应的异常向量。
当异常返回时, 异常处理需要从SPSR_ 寄存器中恢复CPSR 的值,同时从LR_恢复PC,具体的异常返回指令如下:
? 从SWI 和Undef 异常返回时使用:
movs pc, LR;
? 从FIQ、IRQ 和预取终止返回时使用:
SUBS PC, LR,#4;
? 从数据异常返回时使用:
SUBS PC, LR,#8
在使用上述指令异常返回时,如果LR 之前被压栈的话使用LDM ∧, 例如:
LDMFD SP!, {PC}∧
理解了ARM 异常处理的过程以后,Realview MDK 中__irq 关键字的作用就容易理解了。
下面的函数为一个中断处理函数,其前面加了__irq 关键字。
__irq void pwm0_irq_handler(void)。
实验⼀RealViewMDK开发套件的使⽤实验实验⼀ RealView MDK开发套件的使⽤实验【实验⽬的】1、熟悉“STM32F103CB实验开发板”的各主要组成部分;2、掌握RealView MDK开发套件(包括µVision4集成开发环境与RealView 编译器)的使⽤;3、掌握在RealView MDK开发套件下,调试程序的硬件连接⽅法;4、掌握使⽤RealView MDK 创建⼀个⼯程的⽅法;5、学会使⽤µVision4 MDK 编写简单的C语⾔程序并进⾏调试;6、了解STM32F10x的固件库。
【实验仪器】1、硬件:STM32F103CB开发板,ULINK(或JLINK)仿真器套件,PC机2、软件: RealView MDK开发套件, WindowsXP。
【实验内容】1、熟悉RealView MDK开发套件的使⽤2、建⽴⼀个简单的HelloStm32⼯程。
3、编程实现:通过STM32F103CB单⽚机,发送⼀条消息“HelloStm32”给PC或本本,并在其显⽰屏上显⽰。
【实验步骤、分析及结果(在下⾯写出你的代码)】实验步骤:实验中⽤到STM32F103C开发系统: Realview MDK集成开发套件(包括µVision IDE 集成开发环境),ULINK USB-JTAG 仿真器(或JLINK USB-JTAG 仿真器),STM32F103C开发板等。
在µVision IDE 集成开发环境,其操作流程如下:1.新建⼯程;2.为⼯程选择CPU;3.添加启动代码;4.添加相关的固件库⽂件;5.建⽴源⽂件;6.⼯程配置;7.⽣成⽬标代码;8.下载和调试。
分析:HelloRobot.h(260): error: #20: identifier "FILE" is undefined:解决办法#include"HelloRobot.h" 添加头⽂件#include"stdio.h"#include"stdio.h"结果:代码:#include"stm32f10x_lib.h"#include"HelloRobot.h"main(){u8 i;u8 a[]="fuyaowei";RCC_Configuration();GPIO_Configuration();USART_Configuration();for(i=0;a[i]!='\0';i++){USART_SendData(USART1,a[i]);while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)!=SET); }}教师评语:实验成绩:教师:年⽉⽇。