TMC262_SPI总线
- 格式:pdf
- 大小:203.21 KB
- 文档页数:3
步进电机驱动芯片-TMC262
德国TRINAMIC推出史上功能最强步进电机驱动芯片-TMC262
TMC262可以精确、巧妙、随机动态地控制管理驱动芯片输入到电机的电流,即TMC262可以根据电机不同负载需求轻松自如地增加或减少其所输出电流,此功能在大大降低步进电机丢步概率的同时可以减少功率消耗该系列芯片也被称为绿色芯片,很好解决了由于功率过剩而产生的热量,从而可以较少电机和驱动器的发热量。
◆自带256高细分
◆支持step/dir控制信号输入;也支持20BitSPI接口控制
◆带有专利技术stallguard功能可以实现无需传感器精确测试电机负载
◆带有专利技术coolstep可以根据电机的负载自动调节驱动芯片输出的电流,避免因为超载而丢步,也减少电机的发热量,和其他驱动芯片相比节省75%的能量
◆内部自带256细分可以实现在低速时候平滑控制
◆最大驱动电流6A,驱动电压60V
◆高速驱动能力,可以驱动普通的2相步进电机达到5000RPM
◆集成过流,短路,过温等保护与诊断功能。

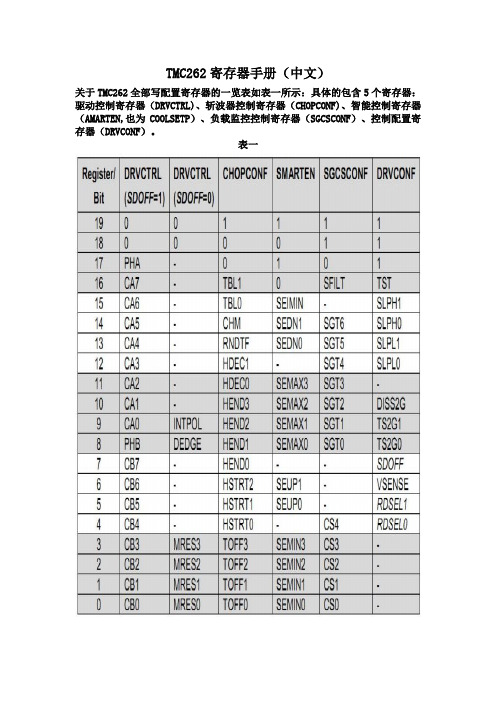
TMC262寄存器手册(中文)
关于TMC262全部写配置寄存器的一览表如表一所示:具体的包含5个寄存器:驱动控制寄存器(DRVCTRL)、斩波器控制寄存器(CHOPCONF)、智能控制寄存器(AMARTEN,也为COOLSETP)、负载监控控制寄存器(SGCSCONF)、控制配置寄存器(DRVCONF)。
表一
1、Driver Control Register (DRVCTRL) 驱动控制寄存器
它这里主要分为2种模式SETP/DIR模式与SPI模式,而这2中模式的选择取决于:控制配置寄存器中的:SDOFF mode bit。
2、Chopper Control Register (CHOPCONF) 斩波控制寄存器
3、coolStep Control Register (SMARTEN)智能控制寄存器
4、stallGuard2 Control Register (SGCSCONF) 负载监控控制寄存器
5、Driver Control Register (DRVCONF) 驱动配置寄存器
6、Read Response 读响应寄存器。
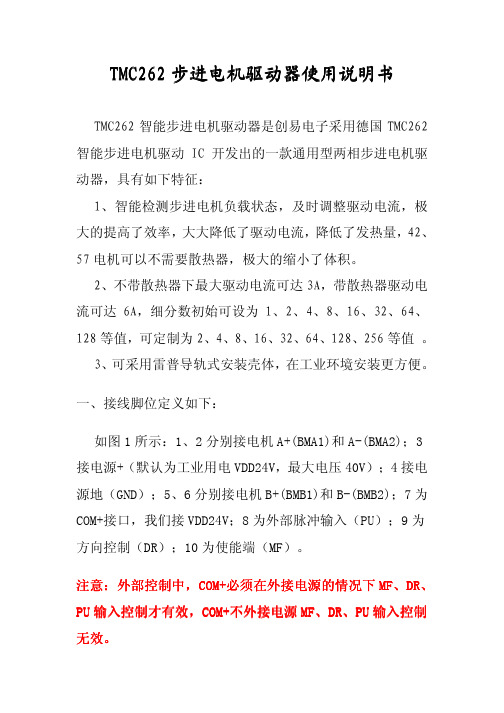
TMC262步进电机驱动器步进电机驱动器使用使用使用说明说明说明书书TMC262智能步进电机驱动器是创易电子采用德国TMC262智能步进电机驱动IC 开发出的一款通用型两相步进电机驱动器,具有如下特征:1、智能检测步进电机负载状态,及时调整驱动电流,极大的提高了效率,大大降低了驱动电流,降低了发热量,42、57电机可以不需要散热器,极大的缩小了体积。
2、不带散热器下最大驱动电流可达3A ,带散热器驱动电流可达6A ,细分数初始可设为1、2、4、8、16、32、64、128等值,可定制为2、4、8、16、32、64、128、256等值 。
3、可采用雷普导轨式安装壳体,在工业环境安装更方便。
一、接线脚位定义如下:如图1所示:1、2分别接电机A+(BMA1)和A-(BMA2);3接电源+(默认为工业用电VDD24V,最大电压40V);4接电源地(GND);5、6分别接电机B+(BMB1)和B-(BMB2);7为COM+接口,我们接VDD24V;8为外部脉冲输入(PU);9为方向控制(DR);10为使能端(MF)。
注意注意::外部控制中外部控制中,,COM+COM+必须必须必须在在外接电源外接电源的的情况下MF MF、、DR DR、、PU 输入输入控制控制控制才有效才有效才有效,,COM+COM+不外接电源不外接电源MF MF、、DR DR、、PU 输入输入控制控制无效无效。
图1二、拨码开关定义如下:如上图所示:产品共用两个4位拨码开关分别命名为拨码开关1、拨码开关2。
拨码开关以二进制计数,向下为0,向上(ON端)为1,拨码开关1为电流调节,4位分为16等份,全部向下时为1,电流最小(0.5A),全部向上时为16,电流最大(8A)。
每加一等份电流增大:8A/16等份=0.5A。
拨码开关2分为两部分,第一部分是第1位,为自检位,开关拨到ON时为内部给脉冲,所以只要把电机的线分别对应接上,电源接上,电机就可正常工作;拨到OFF时为外部控制,只有把电机、电源、COM+分别接上,还得在PU外加脉冲时(脉冲电平24V),电机才会转动。

周立功:深入浅出AMetal谈SPI总线和IIC总线周立功:深入浅出AMetal谈SPI总线和IIC 总线第五章为深入浅出AMetal,本文内容为5.5 S5.5 SPI 总线>>> 5.5.1 初始化>>>5.5.2 接口函数1.从机实例初始化2.设置从机实例3.传输初始化4.消息初始化5.在消息中添加传输6.启动SPI 消息处理7.先写后读8.连续两次写>>> 5.5.3 SPI 扩展接口数据宽度:74HC595 只有8 个并行输出口,因此每次传输的数据宽度为8 位。
SPI 模式:8 位数据是在CP 时钟信号上升沿作用下依次送入74HC595 的,因此在空闲时对时钟没有要求。
如果选择空闲时钟极性为低电平(CPOL=0),则必须在第一个时钟边沿(上升沿)采样数据(CPHA=0),即模式0。
反之,如果选择空闲时钟极性为高电平(CPOL=1),则必须在第二个时钟边沿(上升沿)采样数据(CPHA=1),即模式3。
因此选择模式0 和模式3 均可,后续的程序选择模式3 作为范例。
最高时钟频率:虽然74HC595 最高时钟频率高达100MHz,但MCU 最高主频只有30MHz,因此最高时钟频率设置为一个相对合理的范围,比如,3000000Hz(3MHz)。
片选引脚:片选引脚为PIO0_13。
5.6 I2C 总线>>> 5.6.1 初始化>>> 5.6.2 接口函数1.从机实例初始化2.写操作3.读操作>>> 5.6.3 I2C 扩展接口在使用am_i2c_read()函数前,需要先使用am_i2c_mkdev()初始化与LM75B 对应的I2C从机实例,便于LPC824 读取温度值。
初始化从机实例时,还需要知道两个重要的信息:器件从机地址和实例属性。
LM75B 的从机地址为7 位,1001xxx,其中地址位0~2 分别与硬件连接的A0~A2 一一对应。
基于TMC262的两相步进电机驱动控制器设计Design of Two-phase Stepper Motor DriveController Based on TMC262何正伟翁%信作者(长江大学电子信息学院,湖北荆州434023)[摘要]步进电机作为一种感应式直流电机,具有操作简单,功率低等特D,被广泛应用在工业生产中。
本文设计了一款基于TMC262的两相步进电机驱动控制器,集成了RS-485现场总线,采用Modbus-RTU通信协议与上位机通信。
[关键词]STM32;TMC262;细分控制技术[中图分类号]TM932[文献标识码]B引言步进电机是将电脉冲信号,变为角位移或线位移的控制电机⑴,在非过载的情况下,电机的步距角和转速大小不受电压波动和负载变化的影响,也不受环境条件如温度、气压、冲击、振动等的影响,只与脉冲频率有关。
步进电机通常采用开环控制。
步进电机常见的驱动方式分为两种:1)以绕组电压为控制对象,如调频调压驱动、高低压驱动等方式;2)以绕组电流为控制对象,如恒流斩波驱动方式[2]$本次设计采用恒流斩波驱动方式来驱动电机,针对步进电机在工作过程中可能存在的失速、堵转、发热、振动等问题,提出了通过变速、细分控制技术等解决上述问题的方案$1系统总体设计本设计的系统框图如图1所示,主要由MCU 模块、通信模块、电机驱动模块、步进电机组成$根据生产需要,将参数通过通信模块发送到MCU,进而输出对应的脉冲、方向等命令给电机驱动,从而改变步进电机运动状态$图1系统框图2驱动模块设计驱动模块采用德国专业电机运动控制芯片开发公司TRINAMIC推出的TMC262作为步进电机驱动器件$驱动模块的内部结构简图如图2所示$ TMC262是由TRINAMIC公司开发的一款高性能两相步进电机驱动芯片,集成了诊断和保护功能,同时还具有高分辨率微步进、无传感器机负载、负载率化和低振斩波DIR1NCool s tep 2xADCGate"DriverHSc-BM □—E+严+Vm QSTEP.VCC 10TMC262MCUCSN SCK .SPI control, Config & DiagsProtaction& DiagnosticsChopperV2 x Current ComparatorSine Table 4*256entry■ A stallGuard SG_TST图2驱动模块结构图操作。
TMS320x2802x, 2803x Piccolo SerialPeripheral Interface (SPI)翻译杨建旭单位曲阜师范大学新能源研究所1 增强的SPI模块概览 (2)1.1SPI块框图 (3)1.2 SPI模块信号概要 (4)1.3 SPI模块寄存器概要 (4)1.4 SPI操作 (5)1.4.1 操作引言 (5)1.4.2 SPI模块从模式和主模式操作 (6)1.4.2.1主模式 (6)1.4.2.2 从模式 (7)1.5 SPI中断 (7)1.5.1 SPI中断控制位 (7)1.5.1.1 SPI INT ENA 位(SPICTL.0) (7)1.5.1.2 SPI INT FALG位(SPISTS.6) (8)1.5.1.3 OVERRUN INT ENA位(SPICTL.4) (8)1.5.1.4 RECEIVER OVERRUN FLAG 位(SPISTS.7) (8)1.5.2 数据格式 (8)1.5.3 波特率和时钟策略 (9)1.5.3.1 SPI时钟策略 (9)1.5.4 复位初始化 (10)1.5.5 数据发送例程 (11)1.6 SPI FIFO描述 (12)1.7 SPI 3线模式描述 (14)1.8 数字音频传输中SPI STEINV位 (16)串行外设接口(SPI)串行外设接口(SPI)是高速同步串行输入/输出口,该口允许可编程长度的串行比特以可片成的位移速率流移进和移出设备。
SPI通常用作DSP控制器和外部设备或者其他控制器之间的通信。
典型的应用包括I/O或者诸如移位寄存器,显示驱动和模拟数字转换器等的外部扩充设备。
多设备的通信由SPI的主/从模式来完成。
在C28x系列上,SPI口支持4级深度,接受和发送FIFO,该技术减少了CPU占用率。
注意:28x相对240xA的SPI增强了几个方面的特性。
查看1.5获得更多的细节。
1 增强的SPI模块概览图1显示了SPI与CPU的接口。
先进封装手段在小芯片接口总线技术中的应用随着科技的不断发展,小型化、高速化、高集成度是集成电路技术发展的主要趋势,它促使着芯片封装技术向更先进的方向不断发展,以满足不断提高的性能和可靠性的要求。
在小芯片接口总线技术中,封装结构设计是实现功能模块的关键,在特定应用领域发挥着重要的作用,必须在封装设计中实现对高速和高可靠性的支持才能满足市场需求。
本文主要介绍了应用广泛的六种先进封装手段:1.热压缩封装(HSP)HSP是一种将芯片封装在塑料体中的方法,与传统的焊接方法相比,其优点主要体现在电压下降、信号功率和噪声减小、带宽提高等方面。
HSP已经被广泛用于数字和模拟信号、微控制器等的封装中。
2.超低高度封装(ULHP)ULHP是指一种封装高度小于1毫米的芯片技术,其应用范围主要是智能手机、平板、背光模块等领域。
ULHP采用超高通量射频胶来缩短制造时间,具有尺寸小、比重低、低功耗、高可靠性、高密度等特点。
3.芯片级封装(CSP)CSP是一种面积小、高集成度的芯片终端封装技术,它不仅可以节约空间,还可以减少电压噪声、功耗、延迟等电学问题。
CSP可以是裸晶片(无包覆)或包括硅胶、塑料或陶瓷封装。
CSP广泛应用于微处理器、射频IC等。
4.减薄封装(TLP)TLP是指通过削减芯片厚度来薄化封装的一种技术。
与传统相比,TLP具有高性价比、高可靠性、兼容性好、低耗能、高灵活性等特点。
TLP广泛应用于智能手机、平板电脑等领域。
5.COF封装技术COF是指Chip-On-Film封装技术,是一种将芯片直接封装在塑料膜上的技术,具有高密度、轻薄、可靠性高、结构简单等优点。
COF封装主要用于手机、数字相机、数码相框等电子设备。
6.SiP封装技术SiP是指System-in-Package封装技术,是一种高度集成的微型封装技术,它将多个晶圆与器件封装并集成在一个封装方案中,能够为高端电子设备提供前所未有的低功耗和高速度特性。
SiP封装广泛应用于移动设备、隧道传感器、太阳能电池等领域。
ADXL345经验总结,采⽤SPI和I2C总线操作⼀、 ADXL345简介ADXL345是ADI公司推出的三轴(x,y,z)iMEMS数字加速度计(digital accelerometer ),具有在16G下⾼分辨率(13Bit)测量能⼒,同时具备16Bit数字输出。
ADXL345 适⽤于静态倾⾓测量以及动态加速度测量,⾼达4mg/LSB的灵敏度允许测量⼩于1度的倾⾓。
该传感器还具备单击 /双击探测,⾃由落体探测,并允许⽤户设置⼀个加速度阀值,当加速度值超过设定阀值后可以产⽣⼀个信号输出。
所有这些功能都可以映射到2个中断上。
内置的32级FIFO缓存可以极⼤的缓解处理器的压⼒。
特点:2.0 -3.6VDC供电电压超低功耗: 40uA的测量模式, 0.1uA在standby@2.5V单击/双击检测⾃由落体检测⽤户阀值设定SPI和I2C接⼝ADXL345以+2.5V的电源电压⼯作时的消耗电流控制为标准25µ~130µA。
该产品可⽐与3轴惯性传感器节约80%的耗电量。
主要⾯向⼿机、便携式游戏机、游戏机控制器以及PND等。
还⽀持硬盘的跌落检测等。
可检测的加速度范围为±2/4/8/16G。
集成了FIFO(First-in, First-out)型存储器,最多可存储32组3轴数据。
耐冲击性为1万G。
输出接⼝备有I2C和SPI。
数据输出速度为0.1~3.2kHz。
电源电压(Vs)为+2.0~3.6V,接⼝部分为+1.8V~Vs。
⼯作温度范围为-40~+85℃。
封装采⽤14端⼦的LFCSP。
⼆、 SPI-4线模式操作ADXL345内部寄存器编程要点1.ADXL345 SPI-4线模式的硬件连接电路SPI-4线模式是adxl345默认的操作总线,⽆需配置即可⽤。
,详见datasheet page25 DAT A_FORMAT寄存器。
2.关于ADXL345的PI总线协议与标准的SPI协议的⼀些差异(标准的SPI协议可以参考这⾥不做详细介绍)标准的SPI总线时序中,每个字节之间的操作是断开的,即⽚选线SS_n和串⾏时钟线SCLK 正在传输该字节时有效,其余时刻保持⽆效状态(即SS_n=1,SCLK=1)如下图:ADXL345 datasheet中要求clock polarity (CPOL) = 1 and clock phase (CPHA) = 1,这可以在SOPC中选择SPI IP核作为nios2外设构建系统时,⽤GUI的⽅式⽅便的设置,其SPI操作的时序如下图:从图中可以看到:SPI总线对ADXL345内部寄存器的读写操作都是以字节为单位进⾏的(这是由ADXL345内部30个可操作寄存器均为字节寄存器所决定的),然⽽每两个字节数据/地址之间CS_n和SCLK⼀直需要保持有效。