北航机械设计课件
- 格式:ppt
- 大小:1.11 MB
- 文档页数:21

北航机械课程设计一、课程目标知识目标:1. 让学生掌握机械设计的基本原理,理解机械结构的功能和特点。
2. 使学生了解并掌握机械制图的基本知识,能够正确阅读和绘制机械图纸。
3. 让学生熟悉机械加工工艺,了解不同加工方法的特点及适用范围。
技能目标:1. 培养学生运用机械设计原理解决实际问题的能力,能够进行简单的机械结构设计。
2. 培养学生运用CAD软件进行机械图纸绘制的能力,提高制图效率。
3. 培养学生运用机械加工知识,合理选择加工工艺,提高加工质量。
情感态度价值观目标:1. 培养学生对机械设计的兴趣,激发创新意识,增强实践能力。
2. 培养学生具备良好的团队合作精神,学会与他人沟通交流,提高解决问题的能力。
3. 培养学生严谨细致的工作态度,树立质量意识,为我国航空事业的发展贡献力量。
本课程针对北航机械专业学生,结合学科特点和学生实际情况,注重理论知识与实践操作的相结合。
通过本课程的学习,使学生能够掌握机械设计的基本原理和制图技能,培养具备创新意识和实践能力的机械专业人才。
同时,课程目标分解为具体的学习成果,便于后续教学设计和评估。
二、教学内容1. 机械设计基本原理:包括机械结构设计、机械传动设计、机械零件设计等内容,对应教材第1章至第3章。
- 机械结构设计:讲解结构设计的基本原则,分析典型机械结构的应用实例。
- 机械传动设计:介绍传动原理,分析常用传动方式的特点及应用。
- 机械零件设计:讲解零件设计的基本要求,分析各类零件的设计方法和步骤。
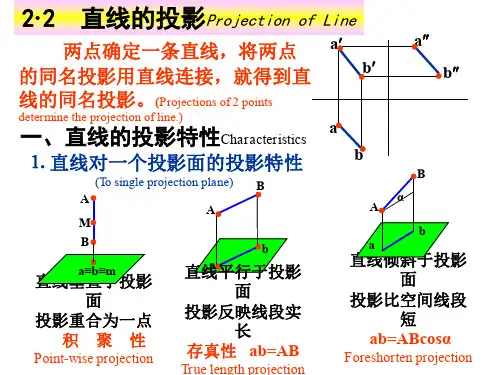
2. 机械制图:包括制图基本知识、机械零件表达方法、装配图等内容,对应教材第4章至第6章。
- 制图基本知识:教授制图标准、投影原理等基础知识。
- 机械零件表达方法:介绍视图、剖面图、局部放大图等表达方法。
- 装配图:讲解装配图的绘制方法,培养学生阅读和绘制装配图的能力。
3. 机械加工工艺:包括金属切削加工、特种加工、工艺参数选择等内容,对应教材第7章至第9章。
- 金属切削加工:介绍车、铣、磨等常见切削加工方法。

勺子有话说勺子诚信出品童叟无欺什么的,基本上涵盖了我记录的重点和做过的考题中出现的问题。
收到勺子这份东西的妞们爷们默默点接受拉到自己的小文档夹里私自收藏就好了,自己复习间隙看看就好,自己的东西想给谁看不想给谁看这个算是作者的权利之一?好吧其实当我心里小九九也好。
打出来实在仓促,公式以及图片都没有加上,或者有也很粗糙,将就一下吧,不成就翻翻书,再或者,也可以等我打出来手画图再去复印一下。
希望拿到的妞们爷们都能考到好的成绩,勺子在这也不枉辛苦一番。
——————————我是分割线~~~————————————————————绪论强度与安全性设计强度:抵抗断裂和残余变形的能力静载荷:不随时间变化或者变化缓慢的载荷动载荷:随时间做周期性变化或者非周期性变化的载荷名义载荷:在工作平稳,载荷分布均匀的条件下,根据理论值计算的载荷计算载荷:考虑实际工作存在冲击,震动,加工,安装等误差因素时确定的零件实际所能承受的载荷(主要考虑动载荷受变应力)稳定的变应力有五个参数最大应力,最小应力,平均应力应力幅,应力循环特征(循环比)变应力下强度计算——疲劳强度计算影响因素:1,材料的极限应力;2 应力集中;3 尺寸效应;4 表面加工质量疲劳极限曲线无限寿命区有限寿命区最终疲劳曲线趋向水平对应的应力为疲劳极限应力*疲劳强度与应力幅有极大关系。
第一章轴1 轴的分类工作过程中承载不同分为传动轴:主要承受转矩;心轴:主要承受弯矩;转轴:既承受弯矩有承受转矩。
Eg:自行车中,前轴后轴为心轴,中轴为转轴2 轴的固定周向:键,花键,过盈配合,销轴向:轴肩,套筒,螺母,挡圈,轴头径向:由配合性质固定3轴用材料碳素钢,合金钢,铸铁4 轴的强度计算分类1对于只传递转矩T 应用扭转强度计算2 对于至承受弯矩的应用弯曲强度计算M3对于既受转矩又受弯矩Me=开根号(M^2+(aT)^2)对于单独的计算过程先用扭转强度进行初步的设计再用弯曲强度进行校核(Me当量弯矩)* 应力校正系数a1 当为循环应力时a=12 当为不变的转矩时a=[-1]/[1]3 当为脉冲转矩时a=[-1]/[0](出现于填空题)轴章节其他填空题一般轴多设计为阶梯状:为了方便轴上零件的装配和安装定位增大轴的圆角半径:降低应力集中,提高疲劳强度设计轴的一般步骤:按转矩初估轴径(设计),结构设计,按当量弯矩进行校核以及安全系数扭转强度的设计公式:d>=c(p/n)^1/3(由T=9.55p/n 切应力=T/W提高轴的强度:选用高强度材料,增大轴径提高轴的刚度:增大轴径第二章齿轮传动1 齿轮传动的特点:传动效率高:传动效率=主动轮转速/从动轮转速=从动轮齿轮半径/主动轮齿轮半径=z2/z1(*此处注意和涡轮蜗杆传动进行比较使用可靠,工作寿命长传动比较稳定,结构紧凑制造和安装精度较高,成本较高中心距不可分(在接触的情况下可以有一定的变为系数,但是不能不接触,满足连续传动条件)不能用于大中心距的传动。
钢板翻转机构运动简图钢板运送到左板,左板水平图五两板同时偏转到垂直偏右10°图六实现钢板180°翻转,右板水平图七如图五、图六所示,分别是两套曲柄摇杆机构的极限位置。
当曲柄以5r/min 速度顺时针旋转了180°时,两摇杆恰好同时到达极限位置,使交接钢板的重合位置位于垂直方向向右偏10°的位置,再转180°同时回到初始位置,且曲柄的转动是匀速的,从而实现同时进程,同时回程,往复循环。
设计计算左夹板曲柄摇杆机构的尺寸设曲柄长度1a 、连杆长度1b (在图中体现为QA,TB 长度)、摇杆长度1c 。
1O A 、1O B 为摇杆的两极限位置,1O C 为1AO B ∠D 的角平分线。
根据题意,1AO C ∠=49°1BO C ∠=49°。
过P 作1O C 的垂线,分别交过曲柄轴线的水平线于点A 、C 、B 。
设计尺寸:在图中: PA=PC-AC=1b -1a ③PA=PT+TB-AC-BC=1a +1b - 2AC ④由③④得: 1a = ACAC= BC= O 1C tan 1AO C ∠=450* tan49°=517.67mm 即: 1a =517.67mm又因 1b + 1a = PC +BC解得: 1b = PC =2000mm1c =11450cos cos 49oO C AO C =∠=685.91mm 左摇杆长1c =685.91mm左曲柄长1a =517.67mm左连杆长1b =2000mm右边曲柄摇杆机构的尺寸设曲柄长度2a 、连杆长度2b 、摇杆长度2c 。
2O D 、2O E 为摇杆分别为水平,垂直向右偏8°的两位置,2O F 为2DO E ∠的角平分线。
根据题意,∠2DO F =∠2EO F =41°。
过P 作2O F 的垂线,过O 2作2O M ⊥PM 于点M 。
PM=PC+O 1O 2=2450mmO 2M=450mmPO 2222PM O M + tan ∠PO 2M=PM/O 2M=5.44则 ∠PO 2M=79.6°已知 ∠DO 2M=50°则 ∠PO 2D=∠PO 2M-∠DO 2M=29.6°得 ∠PO 2F=∠PO 2D+∠2DO F =70.6°O 2F= PO 2*cos ∠PO 2F=2491×cos70.6°=827.41mm2222222491827.41PO O F -=-=2624.82mm 图7O 2D=2c =O 2F/COS 2DO F ∠=1096.33mmDF =EF=2222O D O F -=719.26mm所以 2b +2a =PF+EF=3344.08mm又因 22a =DF+EF联立可得: 2a =719.26mm2b =2624.82mm右摇杆长2c =1096.33mm右曲柄长2a =719.26mm右连杆长2b =2624.82mm如图8整体分析:如图8,设曲柄角速度1ω,与长度l 1,机架夹角1θ,连杆与机架夹角2θ,摇杆角速度3ω,长度3l 、与机架夹角3θ,则 α=90°-21θθ-β=90°-23θθ+因为 βαcos *3*3cos *1*1l w l w =即 w1*1l *)23sin(3*3)21sin(θθθθ-=+l w得 )23sin(*3)21sin(*1*13θθθθ-+=l l w w 当曲柄和连杆共线时,0021==θθ,摇杆速度为0,即摇杆在两个极限位置时的速度为0,这样有助于顺利盛放和交接钢板,避免冲撞,而在中间过程时速度较快,能够节省时间,以满足每分钟翻钢板5次的要求。
第四章动静法•达朗贝尔原理-动静法•刚体惯性力系的简化•定轴转动刚体轴承动反力•动平衡与静平衡问题:车底盘距路面的高度为什么不同?地盘可根据路况不同而升降的轿车问题:汽车刹车时,前轮和后轮哪个容易“抱死”?车轮防抱死装置ABS:Anti-lock Brake System h 1l 2l g m 2F 2N F 1F 1N F无ABS系统汽车刹车时的侧滑现象一、达朗贝尔原理1、质点的达朗贝尔原理FNF am IF F N F 主动力,约束力,惯性力a F m -=I 质点的达朗贝尔原理:}{},,{I N 0F F F =2、质点系的达朗贝尔原理}{},,{I N 0F F F =i i i 若对于质点系中的第i 个质点有:则对于整个质点系有: }{},,,,,,,{I N I N I1N110F F F F F F F F F =n n n i i i NF F a +=m 0F F F =++I N0F F F F =++=∑∑∑===ni i n i i n i i 1I 1N 1R 0F M F M F M M =++=∑∑∑===ni i O n i i O ni i O O 1I 1N 1(((主矢:主矩:力系平衡的条件:F F=+∑∑==ni i ni i1I 1eF M F M=+∑∑==ni i O ni i O1I 1e((二、动静法应用静力学写平衡方程的方法求解质点系的动力学问题,这种方法称为动静法。
质点系运动的每一瞬时有:}{},,,,,,{I N 1I 1N 10F F F F F F =n n ngm gm θABCωLAxF AyF BxF I2F 例:已知:,求A 、B 的约束力。
m L h AC h AB ,,,,2/,θω==解:研究整体,受力分析与运动分析θωsin 2I2I1mL ma F F ===0sin cos 5.0(sin cos 5.0(0I2I1=+-+-+--=∑θθθθmgL L h F mgL L h F h F MBx AI2I1=-++=∑F F F F FAx Bx x20=-=∑mg F FAy ymL F F θω2sin 2=-=附加动反力:由于运动引起的约束力I1F一、平移刚体惯性力系向质心C 简化},{},,,,{I IR I I 1I C n i M F F F F = C ni i i ni i m m a a F F -=-==∑∑==11I IR (im ir cCa 二、平面运动刚体惯性力系向质心C 简化简化条件:刚体的质量对称面平行于运动平面∑===n i i C C 1I I (F M M ∑==⨯-ni i i i m 1(a r ∑==⨯-ni i i m 1(a r 0xyz oix iy iz im iz -设刚体的质量对称面为oxy 面,,(,,(z y x z y x -=ρρ∑==ni i 1I IR F F ∑∑==++⨯-==ni CP CP C i i ni i C C i i m 1n t 1I I((a aa r F M M ∑=⨯-=n i C P i i i m 1 t(a r ∑=⨯⨯-=ni i i i m 1(r r α∑=-=ni i i r m 12(ααC J -=∑∑∑===⨯-⨯-⨯-=ni CP i i ni CP i i ni C i i i i m m m 1n 1t 1(ar ar a r Cni i i m m a a -=-=∑=1 =0=0im ir cCa t CP i an CP i aαiP11CACCa αA简化条件:转动轴A 垂直于质量对称面αC ni i C C Cni i J m -==-==∑∑==1I I 1I IR (F M M a F F IRF CI M IR I I F r M M ⨯+=C A(C a r m J AC C -⨯+-=αRI F A I M (n t CC a a r +⨯--=AC C m J α(t Ca r ⨯--=AC C m J α(AC AC C m J r r ⨯⨯--=αααα2AC C mr J --=α(2ACC mr J +-=α图4.17121、将惯性力向质心C 简化2、将惯性力向转轴A 简化3、将惯性力向杆上B 点简化ABα惯性力向质心C 简化:αα2I I 121,2mL M L m F C ==C a IF CI MCa AB惯性力向转轴A 简化:αα2I I 31,2mL M L m F A ==思考题:已知均质杆长为L ,质量为m ,角速度为零,角加速度为,αC a ABαα2I I 61,2mL M L m F B -==惯性力向转轴B 简化:如何确定惯性力合力的作用线?IF AI M BI M IF13g m A B例:已知L,m,初始时无初速度,求初始时杆的角加速度和约束力问题:求解该题有几种方法?αxF y F 方法一:动静法αα2I I 31,2mL M L m F A ==002I IA =+-====-=∑∑∑F mg F F F F Lmg M M y y x x A mgF F L g y x 41,0,23===α解:受力分析、运动分析、添加惯性力建立“平衡”方程求解方程CI M IF14方法三:应用动能定理和质心运动定理mgF ma F ma t m J y Cy x Cx C A -==⋅=d 21(d 2v g ω方法二:应用动量矩定理和质心运动定理mgF ma F ma LmgJ y Cy x Cx A -===2 α20L a a CyCx α-==运动学关系:gm A BαxF y F15ABC1o 2o 3o gm θ例:已知:,求水平绳切断后的瞬时,板质心加速度和两个绳索的拉力。