第七章 PLC的步进指令与功能指令
- 格式:ppt
- 大小:537.50 KB
- 文档页数:25

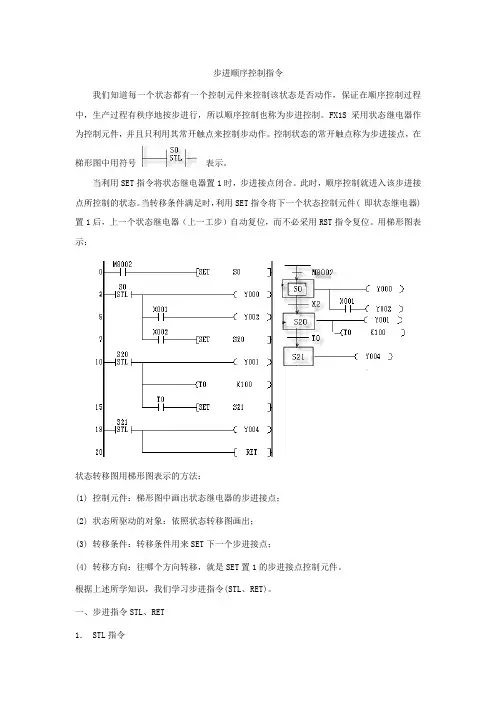
步进顺序控制指令我们知道每一个状态都有一个控制元件来控制该状态是否动作,保证在顺序控制过程中,生产过程有秩序地按步进行,所以顺序控制也称为步进控制。
FX1S采用状态继电器作为控制元件,并且只利用其常开触点来控制步动作。
控制状态的常开触点称为步进接点,在梯形图中用符号表示。
当利用SET指令将状态继电器置1时,步进接点闭合。
此时,顺序控制就进入该步进接点所控制的状态。
当转移条件满足时,利用SET指令将下一个状态控制元件( 即状态继电器)置1后,上一个状态继电器(上一工步)自动复位,而不必采用RST指令复位。
用梯形图表示:状态转移图用梯形图表示的方法:(1)控制元件:梯形图中画出状态继电器的步进接点;(2)状态所驱动的对象:依照状态转移图画出;(3)转移条件:转移条件用来SET下一个步进接点;(4)转移方向:往哪个方向转移,就是SET置1的步进接点控制元件。
根据上述所学知识,我们学习步进指令(STL、RET)。
一、步进指令STL、RET1.STL指令STL指令称为“步进接点“指令。
其功能是将步进接点接到左母线。
格式:操作元件:状态继电器S。
RET指令称为“不仅返回“指令。
其功能是使临时左母线回到原来左母线的位置。
格式:操作元件:无。
程序举例:步进接点只有常开触点,没有常闭触点。
步进接通需要SET指令进行置1,步进接点闭合,将左母线移动到临时左母线,与临时左母线相连的触点用LD、LDI指令,如上图。
在每条步进指令后不必都加一条RET指令,只需在连续的一系列步进指令的最后一条的临时左母线后接一条RET指令返回原左母线,且必须有这条指令。
2.指令说明:(1)步进接点与左母线相连时,具有主控和跳转作用;(2)状态继电器S只有在使用SET指令以后才具有步进控制功能,提供步进接点。
(3)在状态转移图中,会出现在一个扫描周期内两个或两个以上状态同时动作的可能因此在相邻的步进接点必须有联锁措施。
(4)状态继电器在不仅状态转移图中使用可以按编号顺序使用,也可以任意。
3.7步进指令与顺序功能图3.7.1SFC图状态转移图也称顺序功能图(SFC图),用于编制复杂的顺控程序,比梯形图更直观,一个控制过程可以分为若干个阶段,这些阶段称为状态。
状态与状态之间由转换分隔。
相邻的状态具有不同的动作。
当相邻两状态之间的转换条件得到满足时,就实现转换,即上一状态的动作结束而下一状态的动作开始,可用状态转移图描述控制系统的控制过程,状态转移图具有直观、简单的特点,是设计PLC顺序控制程序的一种重要工具。
状态器软元件是构成状态转移图的基本元件。
FX1N系列PLC有状态器1 000点(S0~S999)。
其中S0~S9共10个称为初始状态器,是状态转移图的起始状态。
3.7.1SFC图图7.1是一个简单状态转移图实例。
状态器用框图表示。
框内是状态器元件号,状态器之间用有向线段连接。
其中从上到下,从左到右的箭头可以省去不画,有向线段上的垂直短线和它旁边标注的文字符号或逻辑表达式表示状图7.1状态转移图态转移条件。
旁边的线圈等是输出信号。
在图7.1中,状态器S20有效时,输出Y5接通,程序等待转换条件X3动作。
当X3接通时,状态就由S20转到S21,这时Y5断开。
下面以图7.2所示的机械手为例,进一步说明状态转移图。
机械手将工作从A点向B点移送。
机械手的上升、下降与左移、右移都是由双线圈两位电磁阀驱动气缸来实现的。
抓手对物件的松3.7.1SFC图开、夹紧是由一个单线圈两位电磁阀驱动气缸完成,只有在电磁阀通电时抓手才能夹紧。
该机械手工作原点在左上方,按下降、夹紧、上升、右移、下降、松开、上升、左移的顺序依次运行,它有手动、自动等几种操作方式。
图7.3示出了自动运行方式的状态转移图。
图7.2机械手工作示意图3.7.1SFC图图7.3机械手自动方式状态图3.7.1SFC 图图7.3机械手自动方式状态图3.7.1SFC图状态图的特点是由某一状态转移到下一状态后,前一状态自动复位。
S2为初始状态,用双线框表示。
第七章FX2N系列PLC步进指令及状态编程法习题电气控制与可编程控制器技术(PLC) 第二版史国生课件题及思考题7-1 说明状态编程思想的特点及适用场合。
状态编程的一般设计思想是:将一个复杂的控制过程分解为若干个工作状态,弄清各工作状态的工作细节(如状态功能、转移条件和转移方向),再依据总的控制顺序要求,将这些工作状态联系起来,就构成了状态转移图,简称为SFC图。
状态编程特点,可以简单、直观地表示顺序操作的流程图,而且可以非常容易地设计多流程顺序控制,并且能够减少程序条数, 程序易于理解。
状态编程适用场合,顺序控制中的应用电气控制与可编程控制器技术(PLC) 第二版史国生课件7-2有一小车运行过程如图7-35所示。
小车原位在后退终端,当小车压下后限位开关SQl时,按下启动按钮SB,小车前进。
当运行至料斗下方时,前限位开关SQ2动作,此时打开料斗给小车加料,延时8s后关闭料斗。
小车后退返回,碰撞后限位开关SQ1动作时,打开小车底门卸料,6s后结束,完成一次动作。
如此循环。
请用状态编程思想设计其状态转移图。
图7-35小车运行过程示意图电气控制与可编程控制器技术(PLC) 第二版史国生课件FX-TRN-BEG-C的E-6电气控制与可编程控制器技术(PLC) 第二版史国生课件7-3使用状态法设计第六章讨论过的十字路口交通灯的程序。
电气控制与可编程控制器技术(PLC) 第二版史国生课件7.3 多流程步进顺序控制状态转移图(单流程)例:十字路口交通灯控制电气控制与可编程控制器技术(PLC) 第二版史国生课件7.3 多流程步进顺序控制状态转移图(并行流程)例:十字路口交通灯控制电气控制与可编程控制器技术(PLC) 第二版史国生课件7-4 在氯碱生产中,碱液的蒸发、浓缩过程往往伴有盐的结晶,因此要采取措施对盐碱进行分离。
分离过程为一个顺序循环工作过程,共分6个工序,靠进料阀、洗盐阀、化盐阀、升刀阀、母液阀、熟盐水阀6个电磁阀完成上述过程,各阀的动作如表7-5所示。