基于AForge.NET的智能小车室内视频定位技术研究
- 格式:pdf
- 大小:1.93 MB
- 文档页数:5

基于目标识别的智能小车定位方法研究作者:陶洪浩,刘俊来源:《电脑知识与技术》2011年第01期摘要:本文介绍了一种基于目标识别的智能小车的定位方法,分析了利用图像处理中形状识别的技术完成对于小车的方向引导的原理,同时给出了基于形状识别的图像处理流程设计。
主要讨论了如何利用改进的极坐标下傅里叶描述子提取形状对象特征并进行识别,并根据识别的结果实时修正小车行进路线。
该方法能够克服采集的图像在小车在行进过程中产生的尺度变化以及旋转的影响,较好的完成了识别任务。
整体算法满足实时性要求,且便于工程实现。
关键词:智能小车;定位;目标识别;傅里叶描述子中图分类号:TP393文献标识码:A文章编号:1009-3044(2011)01-0180-02智能车辆系统设计是一门新兴的综合技术,在军事、科研和工业中有广阔的应用前景。
而定位技术是解决车辆路径规划,循迹的一项基本技术。
现有的智能小车定位技术包括采用各种传感器采集外部信号进行相关处理,并获取实时的位置信息,或采用多个传感器获取的多种信号进行位置信息的综合决策,这些传感器包括声音、光电、以及图像等。
而基于图像处理的定位技术在硬件上只需要一个摄像头既可以完成实时图像采集以及定位,采用的设备较少,故障点也相应较少,近年来获得了大量的关注。
同时,由于图像处理技术的多样性,如基于边缘检测、形状特征提取等多种方法的应用能够在复杂的外部背景中正确的识别出用于定位的目标。
同时对于设计人员来说,也能够设计出具备多种特征的场景图像来提供更多的信息量来支撑决策。
基本的图像特征包括灰度、色彩等,可以根据阈值分割、边缘检测等常用方法来提取用于定位的目标对象,但此类特征对于某些干扰如光照等非常敏感,鲁棒性较差。
而基于形状特征的提取与识别则相对稳定,方法也较为丰富。
对于基本形状,例如圆形、三角形、四边形可以采用严格的几何学定义进行判别。
而对于其他无法用简单几何关系来描述但具备某种特定形状的对象,如光学字符等则可通过提取局部特征,然后利用分类器进行分类得到判定结果。

基于WIFI的视频监控智能小车机器人随着科技的不断发展,智能机器人技术也越来越成熟,应用领域也越来越广泛。
其中,基于WIFI的视频监控智能小车机器人可谓是近年来的一项重要技术创新,它将无线网络技术和机器人控制技术巧妙地结合起来,可以实现对各种环境的实时监控和控制。
下面我们就来介绍一下这项创新技术。
首先,这种小车机器人采用无线网络WIFI技术,可以无限距离操控。
用户可以通过连接WIFI来控制小车机器人的行进方向,以及控制摄像头的运动,实现对被监控区域的实时监控。
同时,这种小车机器人还可以实现图像传输和语音对讲,可以让用户通过手机、电脑等设备掌握被监控区域的实时情况,保护物品和人员安全。
其次,这种小车机器人装有视频监控硬件,可以实时拍摄视频和图片,将监控信息及时传输给用户,并可以存储在云端,方便后期查看。
同时,这种视频监控硬件还具有夜视功能,可以帮助用户在光线较暗的情境下依然清晰地监控。
另外,小车机器人配备智能运动控制系统,可以实现远程控制,对不同路面和环境可以做出适应性运动,行进速度和转弯方向也可以根据实际情况随时变化。
而且,小车机器人内置自动避障系统,当检测到前方有障碍物时,会自动停下或绕过障碍物,保证了机器人运行的安全性。
最后,这种小车机器人还具有一定的可扩展性。
用户可以根据自身需求,安装不同种类的设备组件,比如温度传感器、湿度传感器、声音传感器等,实现对不同数据的监控,并可以通过云端平台来处理数据,实现数据的查询和统计,方便用户进行管理和分析。
综上所述,基于WIFI的视频监控智能小车机器人是一种新兴的科技产品,它可以帮助用户实现对被监控区域的实时监控,实现了无限控制距离和自动避障等功能,同时具有可扩展性。
因此,在安防、环保、园林等领域具有广泛的应用前景,也为未来的机器人发展指明了一条新的路线。

基于计算机视觉的智能小车定位导航系统研制的开题报告一、研究背景和意义随着科技的不断进步和大众对生活品质的追求,无人驾驶汽车、智能小车已经成为了当下研究的热点之一。
其中,小型化的智能小车的研究和应用,对于提高物流效率、智慧城市建设等领域具有重要意义。
而智能小车的核心技术之一就是定位导航。
目前,GPS、传感器、激光雷达等技术早已应用到了汽车领域,但对于小型化的智能小车来说,还存在着很多 challenges,如信号失真、环境干扰等。
为了解决智能小车定位导航中的问题,本研究将基于计算机视觉技术,着眼于小型化的智能小车,研制一个基于视觉的智能小车定位导航系统,从而实现其实用化和商业化。
二、研究内容和方法本研究的主要任务是设计和研发一种基于计算机视觉的智能小车定位导航系统,包括前端数据采集、图像分析与处理、路径规划和控制等功能模块。
具体而言,我们将应用OpenCV、CNN、YOLO等技术实现以下步骤:1. 数据采集:基于摄像头获取所需要的各类信息,包括小车当前的位置、道路的类型、行驶区域等等。
2. 图像分析与处理:采用 CNN 算法对图像进行分类、检测等处理,同时应用 YOLO 技术对小车前方的障碍进行识别和预测。
3. 路径规划:根据图像分析结果和小车当前的位置,设计自动化的路径规划算法,制定最优路径,使小车行驶过程中遇到的障碍和道路类型变化不会影响整体方向。
4. 控制:根据路径规划结果,通过控制电机及其他设备,将车体带动到指定位置,实现自主行驶功能。
三、预期成果和应用价值预期成果:1. 完成一套基于计算机视觉的智能小车定位导航系统的原型设计和研发;2. 测试并验证该系统的实用性和可行性。
应用价值:通过本研究,我们可以达到以下目的:1. 提高基于计算机视觉技术的智能小车定位导航的精度和稳定性;2. 解决小型化的智能小车在定位导航方面存在的问题,实现智能小车的普及和商业化;3. 推动智慧城市建设,提升物流效率,降低人力成本,优化交通出行体验等。
几种视频运动识别的方法框架提供了一系列的课程,从而实现不同的运动检测和运动处理算法。
运动检测算法只针对检测运动不连续的视频帧的运动检测和运动提供框架的二进制图像的所有地区,具有运动检测。
运动处理算法的目的是performpost检测运动区域的运动突出处理,计数的运动目标,跟踪,等等。
不同的运动检测类可以使用不同的算法来检测运动。
但它们都是类似的方式如何得到视频帧的分析以及如何报告aboutdetected运动水平。
所有这些类提供的运动属性,这是在[ 0水平运动,1 ]范围。
例如,如果物业说0.05,那么就意味着运动类已检测到5%运动水平。
分析这一特性和比较它预定义的阈值可以提高报警,当检测到的运动水平大于水平被认为是安全的。
下面是一个简单的代码示例,说明不同的运动检测和运动处理算法的主要思想:// create motion detectorMotionDetector detector = new MotionDetector( newSimpleBackgroundModelingDetector( ), new MotionAreaHighlighting( ) );//continuously feed video frames to motion detectorwhile ( ... ){ // process new video frame and check motion level if ( detector.ProcessFrame( videoFrame ) > 0.02 ) { // ring alarm or do somethng else }}这makesmotion探测器从视频阅读脱钩。
看到类访问不同的视频流。
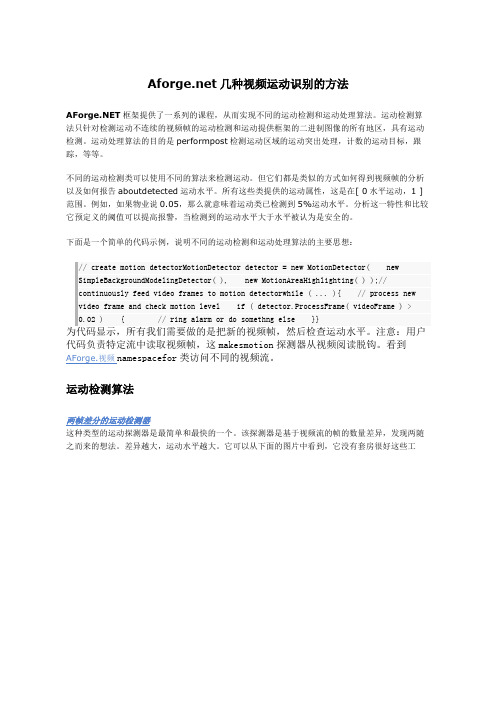
运动检测算法两帧差分的运动检测器这种类型的运动探测器是最简单和最快的一个。
该探测器是基于视频流的帧的数量差异,发现两随之而来的想法。
差异越大,运动水平越大。
基于wifi技术的摄像头智能小车设计所用到的研究方法
设计基于WiFi技术的摄像头智能小车可以采用以下研究方法: 1. 文献综述:查阅相关领域的论文、专利、技术标准、教材等资料,了解WiFi技术、摄像头技术、小车设计等方面的前沿动态、研究热点、技术发展趋势、基本原理和关键技术。
2. 需求分析:通过访谈、问卷调查等方式,了解潜在用户对摄像头智能小车的期望,明确设计目标和功能需求。
3. 概念设计:根据需求分析结果,进行创意激发、方案生成、方案评价等环节,形成初步的摄像头智能小车设计方案。
4. 原理设计:分析并选择适用于摄像头智能小车的传感器、控制器、驱动器、电源等核心器件,确定器件之间的接口关系、信号流程、信息交换等。
5. 设计详细化:根据原理设计结果,进行电路设计、结构设计、软件设计等详细工程设计,并进行仿真、优化和验证。
6. 原型制作:根据详细设计结果,选购元器件,实施电路焊接、结构组装、软件编程等环节,制作完成摄像头智能小车的原型。
7. 实验测试:设计并执行功能测试、性能测试、环境适应性测试等实验方案,对摄像头智能小车原型进行全面评价。
8. 数据分析与优化:分析测试结果,找出摄像头智能小车的不足之处,对设计方案进行迭代优化。
9. 结果展示与论文撰写:撰写设计报告、论文,与同行交流。
10. 产品推广与产业化:制定产品推广策略、商业模式、合作伙
伴等,将摄像头智能小车推向市场。
学校代码 10126 学号 01061093 分类号 TP342 密级本科毕业论文(设计)学院、系内蒙古大学鄂尔多斯学院专业名称自动化年级2010级学生姓名曲昊南指导教师旺扎拉2014年5 月18日WIFI传输视频智能小车的设计摘要智能小车作为现代的新发明,是以后的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。
智能小车能够实时显示时间、速度、里程,具有自动寻迹、寻光、避障功能,可程控行驶速度、准确定位停车,远程传输图像等功能。
WIFI视频智能小车由马达、小车底盘、电机驱动、舵机、摄像头、无线路由器、控制主芯片MC9S12XS128MAL、电源等主要硬件构成,还可以根据自己的爱好加灯光、显示屏、蜂鸣器等。
WIFI视频智能小车利用电脑或手机等配备无线网卡的设备连接到运行Linux系统的路由器,在上位机软件上显示摄像头采集到的通过无线路由器转发的实时视频数据,再让这些终端设备发送控制命令给无线路由器,通过无线路由器将指令转发给主芯片处理,主芯片控制电机驱动就可以完成小车前后左右的动作。
视频的无线传输和终端控制指令的下发都是通过WIFI这种介质实现的,故称它为WIFI视频智能小车。
关键词:WIFI ,智能小车,路由器,MC9S12XS128MAL,LinuxDESIGN OF VIDEO INTELLIGENT CAR BASED ON WIFIAuthor: Qu HaonanTutor: Wang ZhalaAbstractWIFI video intelligent car consist of the motor, car chassis, motor drive, steering gear, camera, wireless router, the main control chip MC9S12XS128MAL, the power can also according to their own hobbies add lighting, display, buzzer and so on. WIFI, video intelligent car using computer or mobile phone that equipped with wireless network device connected to a router running Linux system, display the real-time video data transmitted through the wireless router collected by the camera in the software, then let the terminal device sends a control command to the wireless router, will be forwarded instruction to the main chip processing through a wireless router, the main chip control motor drive can be completed car around action. Video wireless transmission and terminal control instruction issued are achieved by WIFI, so it is a WIFI video intelligent car.KEY WORDS:WIFI ,Intelligent car,Router,MC9S12XS128MAL,Linux目录1绪论 ---------------------------------------------------------------------------------------------- 1 2方案论证及选择--------------------------------------------------------------------------------- 22.1总体设计方案----------------------------------------------------------------------------- 22.1.1系统工作原理--------------------------------------------------------------------- 22.1.2系统框图 -------------------------------------------------------------------------- 22.2硬件方案的选择-------------------------------------------------------------------------- 32.2.1单片机 ----------------------------------------------------------------------------- 32.2.2路由器 ----------------------------------------------------------------------------- 32.2.3摄像头 ----------------------------------------------------------------------------- 52.2.4电机驱动 -------------------------------------------------------------------------- 5 3硬件电路设计 ------------------------------------------------------------------------------------ 73.1主控板设计 ------------------------------------------------------------------------------- 73.1.1单片机最小系统 ------------------------------------------------------------------ 73.1.2电机驱动电路原理及使用方法 ------------------------------------------------- 83.1.3电源管理电路原理概述-------------------------------------------------------- 103.1.4液晶显示屏---------------------------------------------------------------------- 113.1.5灯光控制电路------------------------------------------------------------------- 123.2TP—LINK WR703N无线路由器的改造--------------------------------------------- 133.3摄像头介绍 ----------------------------------------------------------------------------- 143.3.1摄像头概述 --------------------------------------------------------------------------- 143.3.2摄像头的工作原理------------------------------------------------------------------- 153.3云台-------------------------------------------------------------------------------------- 154 系统程序设计--------------------------------------------------------------------------------- 174.1系统程序概述--------------------------------------------------------------------------- 174.1.1主程序流程图------------------------------------------------------------------- 184.1.2串口中断服务函数流程图----------------------------------------------------- 194.1.3定时器中断服务函数流程图 -------------------------------------------------- 19图4.3 定时器中断服务函数流程图 ----------------------------------------------- 20 5 制作与调试 ------------------------------------------------------------------------------------ 215.1系统仿真 -------------------------------------------------------------------------------- 215.1.1常用软件介绍------------------------------------------------------------------- 215.1.2仿真调试 ------------------------------------------------------------------------ 235.2实物调试 -------------------------------------------------------------------------------- 23结论 ----------------------------------------------------------------------------------------------- 26致谢 ----------------------------------------------------------------------------------------------- 27参考文献------------------------------------------------------------------------------------------ 28附录A--------------------------------------------------------------------------------------------- 291绪论现在是一个智能化的时代,随着信息技术的不断发展,现代通信技术与计算机网络技术、智能控制技术的融合已经成为一种趋势。
小车自动跟踪技术研究与实现随着科技的发展和智能化技术的不断进步,小车自动跟踪技术已经成为一个备受关注的研究领域。
本文将针对小车自动跟踪技术的研究和实现提供详细的介绍和分析。
我们将讨论该技术的原理、应用场景、实现过程以及可能面临的挑战和限制。
1. 技术原理小车自动跟踪技术基于图像处理和计算机视觉技术,通过摄像头或传感器收集目标物体的图像或位置信息,然后利用算法分析和处理这些数据,最终实现小车对目标物体的自动跟踪。
该技术主要包括对象检测、运动估计、目标跟踪和运动控制等关键步骤。
2. 应用场景小车自动跟踪技术在许多领域都有广泛的应用,例如智能家居、物流仓储、智能导航等。
在智能家居中,小车自动跟踪技术可以实现家庭服务机器人对家庭成员的跟踪和监控,为他们提供个性化的服务。
在物流仓储中,小车可以自动追踪货物,提高仓库管理的效率。
在智能导航中,小车自动跟踪技术可以实现对行人、车辆等移动物体的跟踪,帮助驾驶员提高驾驶安全性。
3. 实现过程小车自动跟踪技术的实现过程包括硬件部署和软件算法两个方面。
硬件部署方面,需要配备摄像头或传感器来获得目标物体的图像或位置信息。
此外,还需要搭建轮式小车平台,以便实现小车的自动移动。
软件算法方面,主要包括图像处理和计算机视觉算法的开发。
常用的算法包括卡尔曼滤波器、支持向量机和神经网络等。
通过图像处理和计算机视觉算法的应用,可以实现小车对目标物体的检测、跟踪和控制。
4. 挑战和限制虽然小车自动跟踪技术有着广泛的应用前景,但也面临一些挑战和限制。
首先,目标物体的轨迹预测是一个复杂的问题,需要准确的运动估计算法和模型来实现。
其次,当目标物体在复杂环境中移动时,很容易受到光照、背景干扰等因素的影响,导致目标跟踪的准确度下降。
此外,小车的操控和导航也是一个重要的问题,需要设计合适的控制算法和路径规划策略。
最后,这项技术的商业化应用还需要考虑成本、可靠性、安全性等因素。
总结:小车自动跟踪技术是一个具有广阔发展前景的研究领域。
小车自动跟踪技术的研究与应用简介:小车自动跟踪技术是一种基于计算机视觉与感知技术的智能控制系统,在现代物流、仓储、智慧交通等领域有着广泛的应用。
该技术通过利用摄像头或激光雷达等设备感知环境,并结合图像处理和机器学习算法实现小车的自主行驶和准确跟踪。
1. 技术原理小车自动跟踪技术依赖于计算机视觉与感知技术,它主要包括以下几个步骤:- 环境感知:小车通过搭载摄像头或激光雷达等设备来感知周围环境。
摄像头可以拍摄到周围的图像,激光雷达则可以检测到周围的障碍物和距离信息。
- 图像处理:通过对摄像头获取的图像进行处理,提取出与目标物体有关的特征信息,如颜色、形状等。
这些特征信息用于后续的目标跟踪和路径规划。
- 目标跟踪:根据图像处理得到的特征信息,采用机器学习算法对目标进行跟踪和定位。
可以使用深度学习中的目标检测与识别算法,如卷积神经网络(CNN)等。
- 路径规划:根据目标物体的位置和移动速度,结合地图信息,生成小车的路径规划。
路径规划算法可以采用经典的A*算法或动态规划算法等。
- 控制策略:根据路径规划的结果,利用控制器对小车的速度和方向进行控制,实现自动跟踪目标物体。
2. 应用领域小车自动跟踪技术在各个领域有着广泛的应用,下面列举几个典型的应用场景:- 物流与仓储:在仓储场所中,小车可以通过自动跟踪技术实现货物的自动搬运与分拣。
它可以根据货物的位置和重量等信息,智能选择最优路径并准确地将货物送到指定位置。
- 智慧交通:在智慧交通系统中,小车可以自动跟踪行人或车辆,提供智能的导航和交通监控服务。
例如,在人行横道附近或高速公路上,小车可以自动跟踪行人或车辆,提醒司机注意安全。
- 无人巡检:在工业场所,小车可以自动跟踪设备或管道,进行巡检和维护。
它可以定期巡视设备状态,发现故障并及时报警,提高工作效率和安全性。
- 室内导航:小车可以在室内环境中自动跟踪用户或者特定的目标,提供导航服务。
例如,在商场或医院中,小车可以帮助用户找到目标位置,并提供相关信息和服务。