reclaimer structure calculation rev取料机计算书
- 格式:pdf
- 大小:775.90 KB
- 文档页数:18
现代制造技术与装备1642020第11期 总第288期斗轮堆取料机悬臂异常振动的原因及处理措施徐 刚(上海振华重工(集团)股份有限公司,上海 200125)摘 要:斗轮堆取料机因具有自动化工作原理,可以取代人力完成大批量散料搬运工作,进而在装卸运输行业得到了广泛的应用。
虽然斗轮堆取料机具有应用范围广、重复利用率高、劳动力投入少、作业效率高等优点,但是斗轮堆取料机运行时间过长时会出现一些问题。
基于此,针对斗轮堆取料机悬臂异常振动的原因及处理措施进行探析。
关键词:斗轮堆取料机;悬臂架;异常振动Causes and Treatment Measures of Abnormal Cantilever Vibration of Bucket Wheel Stacker ReclaimerXU Gang(Shanghai Zhenhua Heavy Industry (Group) Co., Ltd., Shanghai 200125)Abstract: Bucket wheel stacker reclaimer has been widely used in loading and unloading transportation industry because of its automatic working principle, which can replace manpower to complete bulk material handling. Although bucket wheel stacker reclaimer has the advantages of wide application range, high reuse rate, low labor input and high operation efficiency, some problems will also occur when the bucket wheel stacker reclaimer runs for too long. Based on this, this paper analyzed the causes and treatment measures of abnormal vibration of bucket wheel stacker reclaimer cantilever.Keywords: Bucket wheel stacker reclaimer; cantilever; abnormal vibration悬臂式斗轮堆取料机由斗轮机构、臂架、悬臂皮带机等部分组成。
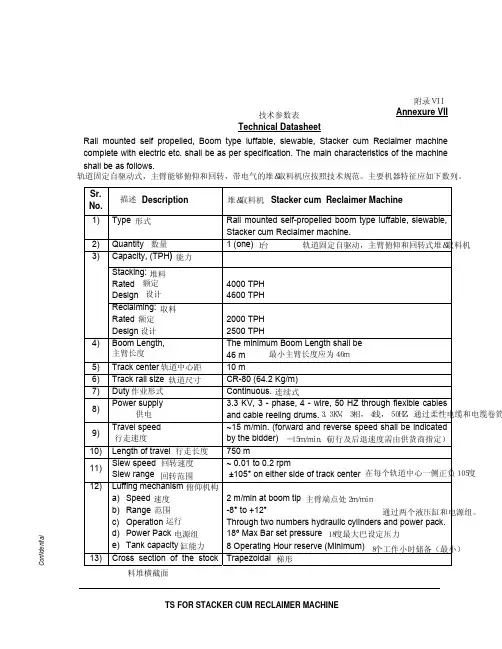
C o n f i d e n t i a lAnnexure VIITechnical DatasheetRail mounted self propelled, Boom type luffable, slewable, Stacker cum Reclaimer machine complete with electric etc. shall be as per specification. The main characteristics of the machine shall be as follows.Sr. No. DescriptionStacker cum Reclaimer Machine1)Type Rail mounted self-propelled boom type luffable, slewable, Stacker cum Reclaimer machine. 2) Quantity 1 (one) 3) Capacity, (TPH )Stacking: Rated Design4000 TPH 4600 TPH Reclaiming: Rated Design 2000 TPH 2500 TPH 4) Boom Length, The minimum Boom Length shall be46 m 5) Track center 10 m 6) Track rail size CR-80 (64.2 Kg/m) 7) Duty Continuous. 8)Power supply 3.3 KV, 3 - phase, 4 - wire, 50 HZ through flexible cables and cable reeling drums.9)Travel speed ~15 m/min. (forward and reverse speed shall be indicated by the bidder) 10) Length of travel 750 m11)Slew speed Slew range ~ 0.01 to 0.2 rpm ±105° on either side of track center 12) Luffing mechanism a) Speed b) Range c) Operation d) Power Pack e) Tank capacity2 m/min at boom tip -8° to +12° Through two numbers hydraulic cylinders and power pack.18⁰ Max Bar set pressure 8 Operating Hour reserve (Minimum) 13) Cross section of the stock Trapezoidal 技术参数表附录VII轨道固定自驱动式,主臂能够俯仰和回转,带电气的堆&取料机应按照技术规范。
![[机械毕业设计论文]悬臂式斗轮堆取料机设计说明书[管理资料]](https://uimg.taocdn.com/cc7786fd4a7302768f993975.webp)
目录1 概述 (1)斗轮堆取料机简介 (2) (3) (4) (5) (8) (9)2 总体设计 (11) (11) (11) (12) (12) (13) (13) (13) (13) (13)Z (14)a (14) (14)Vc (15)3 部件设计 (16) (16) (16) (18) (19) (20)25如需要图纸等资料,联系QQ1961660126 如需要图纸等资料,联系QQ1961660126如需要图纸等资料,联系QQ1961660126 (29) (29)回转机构设计 (32) (35) (38) (40) (41) (41) (42) (45) (46) (47) (48) (48) (48) (48) (49)4 悬臂式斗轮取料机的控制系统设计 (53) (53) (56)控制工作原理 (57)控制过程简介 (57)传感器选用 (57)总结 (59)参考文献 (60)附录 (61)致谢 (64)摘要悬臂式斗轮取料机堆取料机械中的一种,它广泛应用于港口、内陆的散料场所,主要用于取煤和矿石。
悬臂式斗轮取料机主要由金属结构、臂式输送机、回转机构、行走机构、斗轮机构、润滑装置、电气系统和安全装置组成。
工作时,取料机沿着轨道行进,并能改变臂架的角度。
悬臂式斗轮取料机是由斗轮挖掘机发展而来,它能与堆料机和输送机一起组成自动运输系统,随着国民经济的快速发展,对取料机的需求也越来越大。
本文章主要是对斗轮机构和回转机构的设计,它们都是取料机的重要组成部分。
斗轮机构主要是通过销齿传动来驱动斗轮的转动,这种传动方式具有结构简单、加工容易、造价低、拆修方便的优点。
在回转机构中,关键是回转支承。
回转机构的工作原理是小齿轮与回转支承的大齿轮啮合来带动整个回转体的转动,所以本文章将对回转支承进行选型并对小齿轮进行设计。
本文还对相对于斗轮取料能力进行了输送机的选型。
因为悬臂式斗轮取料机比较容易实现自动控制,所以本文章采用PLC进行对取料过程的控制。
圆形煤场堆取料机智能控制策略的改进邹宜金1,林宇华1,郭凯旋2,岳益锋2,高伟1,程永林2,焦莉2,曲金星2(1.福建华电可门发电有限公司,福建福州350000;2.华电电力科学研究院有限公司,浙江杭州310030)一直以来国内煤场的堆取料作业主要依靠人工操作现场堆取料设备完成,其主要原因为煤场面积大,无法提供作业煤堆的实时轮廓,部分具有煤堆三维数据的煤场,堆取料机无法和煤堆三维图像进行交互,完成自动高效的堆取料作业。
在国外,自动堆取料作业研究较早,技术先进的国家经过试验改造已完成了自动堆取料功能,在煤场底层设备安装传感设备并成功上线了自动控制系统。
在日本,大田七尾发电成功应用半自动远程控制的堆取料机。
而位于荷兰的鹿特丹港和德国的汉莎港都成功应用了无人值守的全自动控制的堆取料机,但其无人值守堆取料由于仅应用的激光扫描的方式对料堆进行识别,并未采用点云数据对堆取料机作业点进行精确定位,也没有实时扫描并与堆取料策略交互。
国内的堆取料机自动控制研究,虽然近几年研发了堆取料作业自动控制装置,可以通过PLC控制实现堆取料自动化,并有HMI操作界面,但检测料堆与大臂间的距离、精确定位、根据实际堆料情况计算料堆参数并给出针对煤种的作业参数,这些技术很难实现自动化,以上参数大多依靠堆取料司机人工调整。
在料堆形状不规则时无法自动寻找作业开层点、作业过程中无法实时判断作业模式是否高效合理、作业时无法根据实际煤种进行作业参数调整,这也是造成燃煤电厂的堆取料作业一直为人工手动操作的最大原因。
为了对自动控制系统进行性能优化,目前传感设备对煤场存煤情况的自动实时监测成为研究热点,采用自动控制系统可以改善就地操作人员的工作环境。
随着三维重建技术与自动化技术的不断发展,自动堆取料无人值守系统逐渐在煤场得到广泛应用。
我国的港口曾经采用微波雷达检测、超声波检测、悬挂式倾斜开关检测、单点式激光测距开关检测、红外线检测等技术。
但上述技术没有针对不同煤场进行定制化建模,存在很多缺陷,由于摘要:刮板堆取料机是圆形煤场堆取煤过程中的重要设备,堆取料机的无人值守及自动控制成为当前研究的热点。
斗轮堆取料机走简介和行装置常见故障的分析与处理一、斗轮机简介斗轮堆取料机(bucket-wheel stacker-reclaimer由门座行走机构回转机构变幅悬臂斗轮和尾车组成用于煤场堆取料作业补充:斗轮堆取料机简称斗轮机,是现代化工业中连续装卸散状物料的一种重要设备, 主要用于港口、码头、冶金、水泥、钢铁厂、焦化厂、储煤厂、发电厂等大宗散料如矿石、煤、焦炭、砂石等在存储料场的堆放、提取作业。
斗轮堆取料机主要有门式与摇臂式(图示两种构造,据悉,一种型的牵引式斗轮堆取料机马上面世,其特征是一个装有斗轮的牵引机构在散料场地上万向行走,通过一个输送臂牵引着轨道行走机构在轨道上滑行,其制造本钱仅为目前门式与摇臂式产品的1/3。
补充:桥架式斗轮堆取料机按桥架形式又分为门式和桥式两种。
①门式斗轮堆取料机:它有一个门形的金属构架和一个可升降的桥架。
门架横梁上有一条固定的和一条可移动且可双向运行的堆料带式输送机,在门架一侧的料场带式输送机线上设有随门架运行的尾车。
无格式斗轮通过圆形滚道、支承轮、挡轮套装在可沿升降桥架运行的小车上,桥架内装有带式输送机。
堆料时,物料经料场带式输送机、尾车转至堆料带式输送机上,最终抛卸至料场。
通过门架的移动及其上堆料带式输送机的运行,使物料形成肯定外形的料堆。
取料时,由横向运行的小车及其上旋转的斗轮连续取料,物料在卸料区卸到桥架带式输送机上,最终转卸到料场带式输送机运走。
通过桥架的升降和门架的运行,可将料堆取尽。
②桥式斗轮取料机:与门式斗轮堆取料机在构造上的主要区分是:它没有高大的门架,桥架是固定不升降的,而且处于较低位置;没有堆料带式输送机和尾车;在斗轮的前方有固定在小车上的料耙.小车运行时带动料耙沿料堆端面运动,使上面的散料下滑,以便斗轮取料。
料耙还能使由堆料机按不同物料分层堆放的物料在下滑时混匀,因此往往又称为桥式斗轮混匀取料机。
二、走行装置常见故障的分析与处理斗轮堆取料机的走行装置是支承整机重量的重要部件。
堆取料机工作原理(一)引言概述:堆取料机是一种常见的自动化物料搬运设备,广泛应用于物流、仓储、制造业等领域。
本文将介绍堆取料机的工作原理,包括机械结构、传动系统、控制系统等方面的内容。
正文内容:一、机械结构1. 堆取料机的整体结构由底盘、起升机构、伸缩机构、取料装置等组成。
2. 底盘是整个设备的基础支撑,具备稳定性和承载能力。
3. 起升机构通过液压或电机驱动,用于实现货物的垂直运动。
4. 伸缩机构可以实现取料装置的水平伸缩,以适应不同尺寸的物料。
5. 取料装置通过机械臂、夹具等实现对物料的抓取和搬运。
二、传动系统1. 堆取料机的传动系统一般包括电机、减速器和轮轴。
2. 电机为整个设备提供动力,根据需要选择合适的电机功率和类型。
3. 减速器用于降低电机转速并增加扭矩,以满足设备对动力的要求。
4. 轮轴通过带动车轮,实现堆取料机的移动和转向功能。
三、控制系统1. 堆取料机的控制系统通常包括人机界面、PLC控制器和传感器等组成部分。
2. 人机界面用于操作人员与设备进行交互,实现参数设置和监控功能。
3. PLC控制器是设备的核心控制单元,负责数据处理和指令发送等任务。
4. 传感器用于获取设备运行状态和环境信息,实现自动化控制和安全保护。
四、工作过程1. 堆取料机的工作过程通常包括定位、抓取、起升、搬运和放置等步骤。
2. 定位阶段,堆取料机根据预设的坐标或信号,将取料装置准确定位到目标物料的位置上。
3. 抓取阶段,取料装置根据预设动作,精确抓取目标物料并固定。
4. 起升阶段,起升机构运动,使抓取到的物料垂直上升到所需高度。
5. 搬运阶段,堆取料机在机械结构的配合下,将物料准确搬运到目标位置。
6. 放置阶段,堆取料机将物料放置到指定的位置并松开夹具,完成工作任务。
五、总结本文对堆取料机的工作原理进行了详细介绍,包括机械结构、传动系统和控制系统的组成与功能,以及工作过程的步骤和流程。
深入了解堆取料机的工作原理有助于提高设备的运行效率,使其能更好地满足物料搬运的需求。

斗轮堆取料机全自动控制系统技术规范1范围本文件规定了斗轮堆取料机全自动控制系统的组成、功能和性能要求等。
本文件适用于火力发电厂、煤炭散货码头等干散货条形料场的臂式堆料机、臂式斗轮取料机、臂式斗轮堆取料机(以下统称为“斗轮堆取料机”)。
其他类型堆取料机可参照本标准执行。
2规范性引用文件下列文件对于本文件的应用是必不可少的。
凡是注日期的引用文件,仅所注日期的版本适用于本文件。
凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB30574机械安全安全防护的实施准则GB/T32919信息安全技术工业控制系统安全控制应用指南GB/T4208外壳防护等级(IP代码)DL/T183斗轮堆取料机技术条件DL/T283.1电力视频监控系统及接口第1部分:技术要求DL/T2487电力燃煤机械名词术语DL/T5187.3火力发电厂运煤设计技术规程第3部分:运煤自动化CH/T2009全球定位系统实时动态测量(RTK)技术规范3术语和定义DL/T2487中确立的以及下列术语和定义适用于本文件。
3.1斗轮堆取料机全自动控制系统full-automatic control system of bucket-wheel stacker-reclaimer基于斗轮堆取料机本体,利用检测、控制、通讯、物料三维建模、安全防护等技术,实现斗轮堆取料机定位、堆料、取料等作业全自动控制的系统。
3.2带式输送机系统system of belt conveyors由带式输送机及辅助设施组成的,用于运输散料进出料场的输送系统。
3.3斗轮堆取料机本体控制站bucket-wheel stacker-reclaimer body control station已布置于斗轮堆取料机本体、满足DL/T183中有关电气传动和控制要求的控制器,通常是PLC(programmable logic controller,可编程逻辑控制器)设备,可实现斗轮堆取料机的半自动控制。
矿石取料机堵斗监测改造作者:吴国威侯国强来源:《城市建设理论研究》2013年第31期摘要:在堆取料机取料装车作业或卸船堆料作业过程中,悬臂皮带上的水湿物料粘连皮带、堵塞中心漏斗或尾车漏斗的情况时有发生;物料中混有杂质或冻块等硬物造成的头部导料槽卡堵,落料时杂质或冻块等硬物划伤悬臂皮带等状况也频繁出现.取料装车作业和堆料作业过程中,物料状态、流量大小等信息对于堆取料机生产作业的安全保障、效率、质量,以及设备的磨损情况都有重要影响.关键词:取料机监测改造Abstract: :in the stacker reclaimer loading or unloading stacking operation process, cantilever belt water wet material adhesion belt, blocking the funnel center or the tail car hopper happens; the material is mixed with caused by impurities or frozen blocks and other hard objects head guide chute blockage, blanking impurities or frozen block scratch cantilever belt also appear frequently. Taking loading operation and stacking operation process, material flow state, size and other information for security, efficiency, quality of stacker reclaimer production, wear and equipment all have important influence.Keywords: reclaimer monitoring transformation中图分类号:TD2文献标识码:A功能与原理介绍物料粘度较高时,大机漏斗堵塞可能性随之增大,存在由转接皮带开始堵料和仅受料流冲击位置堵料两种情况,即平常所说的实堵和虚堵。

斗轮堆取料机使用维护说明书二零一八年四月目录 Contents1.设备环境及性能Environment and functions of equipment2.主要结构和技术参数Main structure and technical data3.工作原理与机构概述Working principle and constitution4.斗轮机使用说明Operation instruction about the bucket wheel stacker and reclaimer 5.操作及维护说明operation and maintenance specification6.易损件明细表:List of wearable parts:本文仅对机械部分安全操作、检查维护等方面作以说明。
(该机电气控制系统另见臂式斗轮堆取料机电气说明书)The instruction only describes the safety operation, inspection and maintenance of the mechanical part.(instruction of electrical control system is in the electrical instruction)1.设备环境及性能Equipment environment and functions1.1环境climatic condition周围气温ambient temperature:max 40.8°C相对湿度relative humidity: 84%工作环境:极端积满灰尘和腐蚀性Working condition: extremely dirty and causticity工作风速working wind speed: 70Km/h非工作风速non-working wind speed:120Km/h1.2 设备性能 Equipment functions堆料能力stacking capacity:1200 t/h取料能力reclaiming capacity: 300t/h回转半径slewing radium: 35 m回转角度slewing angle:±110°物料:煤 material: coal粒度granularity: 0~50mm密度density: 0.65~0.78t/m3堆积角repose angle: 35°~50°含水率humidity: 29.2~40%堆高:轨上:12m轨下:1.5mheight of pile: up rail 12m down rail 1.5m轨距rail distance: 7 m轨道型号rail type:50kg/m走行距离:约146 m travel distance: appr. 146m尾车型式:半趴式单尾车,折返取料type of tripper: fix type供电方式:电缆卷筒 power supply: cable drum供电电压supply voltage: 6000v 50Hz供电位置:料场中部 power supply position: center of material yard地面带式输送机:(理论带面距轨顶):1000mmground belt conveyor: (from top plane of horizontal idlers of upper idlers to top of the rail)带宽width:1400 mm 带速 speed:2.5 m/s2.主要结构和技术参数main structure and technical data(1)主要结构main structure臂式斗轮堆取料机主要由斗轮机构、上部金属结构、悬臂带式输送机、俯仰机构、转台、回转机构、门座、行走机构、中心落料斗系统、半趴式折返尾车、放缆系统、电气室、司机室、润滑系统、洒水系统、检测系统、配重、电控系统、电缆卷筒等部分组成。
工程技术科技创新导报 Science and Technology Innovation Herald35DOI:10.16660/ki.1674-098X.2008-5640-9579圆形煤场夏德堆取料机故障的分析与排除①陈东平(广东红海湾发电有限公司 广东汕尾 516600)摘 要:夏德圆形煤场堆取料机在生产过程中应用频繁,导致系统故障率升高,随着设备使用年限的升高,设备工作效率降低,后期的投入维修成本升高,严重时会直接影响设备的正常生产投入运用,间接给企业造成较大经济损失。
该文阐述了夏德堆取料机结构设计及各种潜在的故障问题,针对夏德堆取料机经常出现的相关故障现象,分析原因保证设备稳定、高效地运行。
关键词:夏德堆取料机 机械结构 PLC 液压张进力低 链条脱轨中图分类号:TQ172.6 文献标识码:A 文章编号:1674-098X(2020)11(c)-035-03Analysis and Elimination of SCHADE Stacker and ReclaimerFailure in Circular Coal YardCHEN Dongping(Guangdong Red Bay Power Generation Co., Ltd., Shanwei, Guangdong Province, 516600 China)Abstract: The frequent use of stackers and reclaimers in the production process of SCHADE circular coal yard leads to an increase in the system failure rate. As the service life of the equipment increases, the efficiency of the equipment decreases, and the later investment and maintenance costs increase, and it will directly affect the normal production and use of equipment, and indirectly cause greater economic losses to the enterprise. This article describes the structural design of the SCHADE stacker and reclaimer and various potential failure problems. Aiming at the related failure phenomena that often occur in the SCHADE stacker and reclaimer, analyze the reasons accordingly to ensure stable and efficient operation of the equipment.Key Words: SCHADE stacker and reclaimer; Mechanical structure; PLC; Low hydraulic tension; Chain derailment①作者简介:陈东平(1980—),男,汉族,广东揭阳人,本科,研究方向为圆形煤场堆取料机运行维护。
Chapter 1 SummaryDQ500/1000·35 boom bucket-wheel stacker reclaimer (BWSR) is a kind of large, continuous and high efficient bulk cargo and granular material stacking and reclaiming equipment, developed, designed and manufactured by Changchun Generating Equipment Co., Ltd, China for Botswana Morupule B 4X150MW Power Station project.This “operation instruction” includes necessary data a nd explanation of the equipment. Main contents are as follows: performance of the equipment and technical parameter, equipment structure, operating mode and characteristic, operating regulations, safe operating regulation and maintenance as well as service etc. of the equipment. There are interlocking protection between long travel drive, luff, bucket wheel drive and boom conveyor etc transmission part (detailed information refer to the instruction in each Chapter/Section). Operator must read “Operation i nstruction” carefully and master daily operation and maintenance before starting to work; if operation, maintenance is improper, not only can reduce the service life of equipment, but also can cause the accident.1.1 Brief introduction of the equipmentThis machine adopts integral hydraulic luffing structure. Bucket Wheel Stacker Reclaimer mainly consists of bucket-wheel mechanism, Super steel structure, boom conveyor, Main machine stairs/ladder/walkway and platform , luff unit , slew unit, long travel mechanism, slew deck, portal,Long travel, impact bracket ,tripper car, ladder, walkway and platform of tripper car, dust suppression device/sprinkling device, electric room, operator’s cabin, electric al system and counterweight assembly etc; The operator’ s cab should be suspended installingon the upper part of the pylon at bucket wheel side; the super steel structure which bucket wheel mechanism, boom conveyor, operator’s cabin etc luffing parts are installed on can luff around luffing pivot; Tripper car is cross tripper car (it can realize the function of stacking and shuttle reclaiming);and power cable reeler, control cable reeler, electric room and water source device of sprinkling system etc are installed on the tripper car.1.2 working principleThis equipment is selected to use manual, manual interlocked and semi-automatic for stacking and reclaiming operation.1.2.1 During stacking operation, the material transferred from auxiliary tripper(yard-conveyor) will be delivered to transfer chute through primary tripper car and head part hopper of the tripper car; - then delivered to boom conveyor, at last stacking onto stockpiles. Boom conveyor’s luffing can realize high & low level stacking; Bucket wheel boom slewing can reach left-right stockyard and stockyard width stacking, Long Travel Drive can realize stacking along the track length.1.2.2 Reclaiming operation is carried out according to layer reclaiming processas well as bevel reclaiming if necessary. The coal will be excavated and reclaimed by the bucket (bucket wheel mechanism), and delivered to boomconveyor. Then transfer chute via yard conveyor output. Bucket wheel boom luffing can realize high & low level reclaiming; Bucket wheel boom slewing can reach left-right stockyard and stockyard width reclaiming.Forbidden to reclaim the material only depending on long travel.Chapter 2 Performance of the machine and main technical parameter1 Type of equipmentDQ 500 / 1000.35type,it means:35-slewing radius(the distance from bucketwheelcenter to slewing center of the equipment is 35m);1000--stacking capacity 1000 tons/hour;500--reclaiming capacity 500 tons/hour;Q……reclaiming ;D……s tacking 。