第二章动力学系统的微分方程模型
- 格式:doc
- 大小:1.43 MB
- 文档页数:25
第二章:动力学系统的微分方程模型利用计算机进行仿真时,一般情况下要给出系统的数学模型,因此有必要掌握一定的建立数学模型的方法。
在动力学系统中,大多数情况下可以使用微分方程来表示系统的动态特性,也可以通过微分方程可以将原来的系统简化为状态方程或者差分方程模型等。
在这一章中,重点介绍建系统动态问题的微分方程的基本理论和方法。
在实际工程中,一般把系统分为两种类型,一是连续系统;其数学模型一般是高阶微分方程;另一种是离散系统,它的数学模型是差分方程。
§2.1 动力学系统统基本元件任何机械系统都是由机械元件组成的,在机械系统中有3种类型的基本机械元件:惯性元件、弹性元件和阻尼元件。
1 惯性元件:惯性元件是指具有质量或转动惯量的元件,惯量可以定义为使加速度(或角加速度)产生单位变化所需要的力(或力矩)。
惯量(质量)=)加速度(力(2/)s m N 惯量(转动惯量)=)角加速度(力矩(2/)s rad m N ⋅2 弹性元件:它在外力或外力偶作用下可以产生变形的元件,这种元件可以通过外力做功来储存能量。
按变形性质可以分为线性元件和非线性元件,通常等效成一弹簧来表示。
对于线性弹簧元件,弹簧中所受到的力与位移成正比,比例常数为弹簧刚度k 。
x k F ∆=这里k 称为弹簧刚度,x ∆是弹簧相对于原长的变形量,弹性力的方向总是指向弹簧的原长位移,出了弹簧和受力之间是线性关系以外,还有所谓硬弹簧和软弹簧,它们的受力和弹簧变形之间的关系是一非线性关系。
3 阻尼元件:这种元件是以吸收能量以其它形式消耗能量,而不储存能量,可以形象的表示为一个活塞在一个充满流体介质的油缸中运动。
阻尼力通常表示为:αxc R = 阻尼力的方向总是速度方向相反。
当1=α,为线性阻尼模型。
否则为非线性阻尼模型。
应注意当α等于偶数情况时,要将阻尼力表示为:||1--=αx xc R 这里的“-”表示与速度方向相反§2.2 动力学建模基本定理1 动力学普遍定理对于大多数力学问题,可以使用我们熟知的牛顿动力学基本定理来解决,动力学普遍定理包括动量定理、动量矩定理和动能定理,以及其他变形形式,普遍定理的特点是比较直观,针对不同的问题可以选择不同的力学定理,在一般情况下利用普遍定理可以得到大多数动力学系统的数学模型。

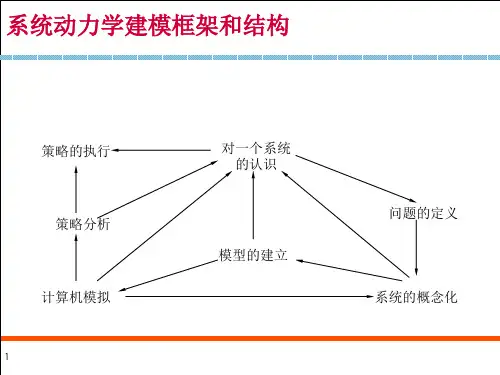

系统动力学9种模型引言系统动力学是一种研究动态系统行为的方法论,它通过构建系统模型来分析系统的各种因果关系和变化规律。
在系统动力学中,有9种基本模型被广泛应用于各种领域的问题分析和解决。
本文将对这9种模型进行全面、详细、完整且深入地探讨。
1. 积累模型积累模型是系统动力学中最基本的模型之一,它描述了一个变量或者一组变量的积累过程。
例如,当我们考虑人口增长的问题时,可以使用积累模型来描述人口数量随时间的变化。
积累模型通常使用微分方程表示。
1.1. 特点 - 变量之间存在流入和流出的关系; - 变量之间的积累是连续的; - 流入量和流出量可以是恒定的或者变化的。
1.2. 应用示例积累模型在生态学、经济学、工程管理等领域得到了广泛的应用。
例如,在生态学中,可以使用积累模型来研究物种数量的变化;在经济学中,可以使用积累模型来研究货币的流通和储蓄;在工程管理中,可以使用积累模型来研究项目进展和资源分配。
1.3. 示例方程dP/dt = b*P - d*P其中,P表示人口数量,t表示时间,b表示出生率,d表示死亡率。
2. 流动模型流动模型描述了一个变量或者一组变量之间的流动过程。
它通常用来研究物质、能量、信息等在系统中的传递和传播。
例如,在物流管理中,可以使用流动模型来研究物料的流动和分配。
2.1. 特点 - 变量之间存在流动的关系; - 流动可以是单向的或者双向的; -流动可以是连续的或者离散的。
2.2. 应用示例流动模型在供应链管理、信息传输、能量传递等领域具有广泛的应用。
例如,在供应链管理中,可以使用流动模型来优化物料的流动和库存的控制;在信息传输中,可以使用流动模型来研究信息的传播和处理;在能量传递中,可以使用流动模型来分析能量的转化和利用。
2.3. 示例方程dQ/dt = f - k*Q其中,Q表示物料的数量,t表示时间,f表示流入量,k表示流失率。
3. 动力平衡模型动力平衡模型描述了一个变量或者一组变量在达到平衡状态时的行为。
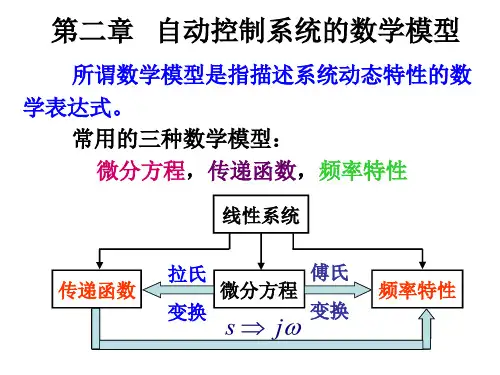
机械工程控制基础复习第一章 绪论1.控制理论在工程技术领域中体现为工程控制论,在机械工程领域则体现为机械工程控制论。
2.工程控制论实质上是研究工程技术中广义系统的动力学问题。
具体地说,它研究的是工程技术中的广义系统在一定的外界条件(即输入或激励,包括外加控制与外加干扰)作用下,从系统的一定的初始状态出发,所经历的由其内部的固有特性(即由系统的结构与参数所决定的特性)所决定的整个动态历程;研究这一系统及其输入、输出三者之间的动态关系。
3。
y(t )称为系统的输出,显然,y(t )(它就是微分方程的解)是由系统的初始状态、系统的固有特性、系统与输入之间的关系以及输入所决定的。
4.工程控制论(包括机械工程控制论)的内容大致可归纳为如下五个方面:⑴当系统已定、输入(或激励)已知时,求出系统的输出(或响应),并通过输出来研究系统本身的有关问题,此即系统分析问题;⑵当系统已定,确定输入,且所确定的输入应使得输出尽可能符合给定的最佳要求,此即最优控制问题;⑶当输入已知时,确定系统,且所确定的系统应使得输出尽可能符合给定的最佳要求,此即最优设计问题;⑷当输出已知时,确定系统,以识别输入或输入中的有关信息,此即滤波与预测问题;⑸当输入与输出均已知时,求出系统的结构与参数,即建立系统的数学模型,此即系统识别或系统辨识问题。
5。
反馈:系统的输出不断地、直接或间接地、全部或部分地返回,并作用于系统。
负反馈:输出(被控量)偏离设定值(目标值)时,反馈作用使输出偏离程度减小,并力图达到设定值.反馈的作用:消除偏离正反馈: 输出偏离初始值(或稳定值)时,反馈作用使输出偏离程度加剧。
反馈的作用:加剧偏离。
6.开环控制:只有输入量对输出量产生控制作用,输出量不参与对系统的控制。
特点是 结构简单、维护容易、成本低、不存在稳定性问题;输入控制输出;输出不参与控制; 系统没有抗干扰能力。
适用范围:输入量已知、控制精度要求不高、扰动作用不大。
第二章:动力学系统的微分方程模型利用计算机进行仿真时,一般情况下要给出系统的数学模型,因此有必要掌 握一定的建立数学模型的方法。
在动力学系统中,大多数情况下可以使用微分方程 来表示系统的动态特性,也可以通过微分方程可以将原来的系统简化为状态方程或 者差分方程模型等。
在这一章中,重点介绍建系统动态问题的微分方程的基本理论 和方法。
在实际工程中,一般把系统分为两种类型,一是连续系统;其数学模型一般 是高阶微分方程;另一种是离散系统,它的数学模型是差分方程。
§ 2.1动力学系统统基本元件任何机械系统都是由机械元件组成的,在机械系统中有 3种类型的基本机械元件:惯性元件、弹性元件和阻尼元件。
1惯性元件:惯性元件是指具有质量或转动惯量的元件,惯量可以定义为使加速度(或角加速度)产生单位变化所需要的力(或力矩)。
2弹性元件:它在外力或外力偶作用下可以产生变形的元件,力做功来储存能量。
按变形性质可以分为线性元件和非线性元件,通常等效成一弹 簧来表示。
对于线性弹簧元件,弹簧中所受到的力与位移成正比,比例常数为弹簧刚度 k 。
F Wx这里k 称为弹簧刚度,级是弹簧相对于原长的变形量,弹性力的方向总是指向弹簧的原长位移,出了弹簧和受力之间是线性关系以外,还有所谓硬弹簧和软弹簧, 它们的受力和弹簧变形之间的关系是一非线性关系。
3阻尼元件:这种元件是以吸收能量以其它形式消耗能量,而不储存能量,可以形象的表示为一个活塞在一个充满流体介质的油缸中运动。
阻尼力通常表示为:D aR = ex阻尼力的方向总是速度方向相反。
当1,为线性阻尼模型。
否则为非线性阻尼模型。
应注意当:等于偶数情况时,要将阻尼力表示为:R - -ex | x 4 | 这里的"-”表示与速度方向相反惯量(质量)力(N ) 加速度(m/ s 2)惯量(转动惯量)力矩(N m ) 角加速度(rad / s 2)这种元件可以通过外§ 22 动力学建模基本定理1动力学普遍定理对于大多数力学问题,可以使用我们熟知的牛顿动力学基本定理来解决, 动力学普遍定理包括动量定理、动量矩定理和动能定理,以及其他变形形式,普遍 定理的特点是比较直观,针对不同的问题可以选择不同的力学定理,在一般情况下 利用普遍定理可以得到大多数动力学系统的数学模型。
系统动力学的9种模型解析标题:系统动力学的9种模型解析引言:系统动力学是一种研究动态复杂系统行为的数学方法,广泛应用于经济学、生态学、管理学等领域。
本文将深入探讨系统动力学的9种常见模型,并分析其理论基础和应用领域。
通过对这些模型的解析,旨在帮助读者更深入地理解系统动力学及其在实践中的作用。
第一部分:系统动力学概述在介绍具体的模型之前,有必要先了解系统动力学的基本概念和原理。
系统动力学着重于分析系统内部各个组成部分之间的相互关系,通过建立微分方程等数学模型来描述系统的演化过程。
这一方法注重动态演化和非线性特性,在解决复杂问题时具有独特的优势。
第二部分:9种系统动力学模型1. 常微分方程模型:系统动力学的基础,用于描述动态系统的变化过程。
2. 资源流模型:关注系统内资源的流动和变化,适用于生态学、能源管理等领域的研究。
3. 增长模型:研究系统中因子的增长和衰减,可应用于经济学、人口学等领域。
4. 循环模型:探讨系统中的循环过程,如经济周期的波动,可应用于宏观经济研究。
5. 积聚模型:研究系统中积聚和堆积的过程,如资本积累,适用于经济学和企业管理等领域。
6. 信息流模型:研究系统中信息传递和决策的影响,可用于管理学和组织行为学的研究。
7. 优化模型:优化系统中某些指标的值,如最大化效益或最小化成本,适用于运筹学等领域。
8. 非线性模型:考虑系统中的非线性效应,如混沌和复杂性的产生,广泛应用于自然科学和社会科学。
9. 策略模型:研究系统中不同决策对结果的影响,适用于战略管理和政策制定等领域。
第三部分:系统动力学的理论与实践系统动力学的理论基础包括建模、仿真和分析等方法。
通过系统动力学模型,我们可以深入研究系统的行为、寻找潜在问题,并基于模型结果做出合理的决策。
在实践中,系统动力学可应用于企业管理、政策制定、环境保护等领域,为问题解决提供了一种全面和系统的方法。
第四部分:总结与回顾通过对系统动力学的9种模型的解析,我们可以看到系统动力学对于复杂问题的分析和理解具有重要意义。
第二章:动力学系统的微分方程模型利用计算机进行仿真时,一般情况下要给出系统的数学模型,因此有必要掌握一定的建立数学模型的方法。
在动力学系统中,大多数情况下可以使用微分方程来表示系统的动态特性,也可以通过微分方程可以将原来的系统简化为状态方程或者差分方程模型等。
在这一章中,重点介绍建系统动态问题的微分方程的基本理论和方法。
在实际工程中,一般把系统分为两种类型,一是连续系统;其数学模型一般是高阶微分方程;另一种是离散系统,它的数学模型是差分方程。
§2.1 动力学系统统基本元件任何机械系统都是由机械元件组成的,在机械系统中有3种类型的基本机械元件:惯性元件、弹性元件和阻尼元件。
1 惯性元件:惯性元件是指具有质量或转动惯量的元件,惯量可以定义为使加速度(或角加速度)产生单位变化所需要的力(或力矩)。
惯量(质量)=)加速度(力(2/)s m N 惯量(转动惯量)=)角加速度(力矩(2/)s rad m N ⋅2 弹性元件:它在外力或外力偶作用下可以产生变形的元件,这种元件可以通过外力做功来储存能量。
按变形性质可以分为线性元件和非线性元件,通常等效成一弹簧来表示。
对于线性弹簧元件,弹簧中所受到的力与位移成正比,比例常数为弹簧刚度k 。
x k F ∆=这里k 称为弹簧刚度,x ∆是弹簧相对于原长的变形量,弹性力的方向总是指向弹簧的原长位移,出了弹簧和受力之间是线性关系以外,还有所谓硬弹簧和软弹簧,它们的受力和弹簧变形之间的关系是一非线性关系。
3 阻尼元件:这种元件是以吸收能量以其它形式消耗能量,而不储存能量,可以形象的表示为一个活塞在一个充满流体介质的油缸中运动。
阻尼力通常表示为:αxc R = 阻尼力的方向总是速度方向相反。
当1=α,为线性阻尼模型。
否则为非线性阻尼模型。
应注意当α等于偶数情况时,要将阻尼力表示为:||1--=αx xc R 这里的“-”表示与速度方向相反§2.2 动力学建模基本定理1 动力学普遍定理对于大多数力学问题,可以使用我们熟知的牛顿动力学基本定理来解决,动力学普遍定理包括动量定理、动量矩定理和动能定理,以及其他变形形式,普遍定理的特点是比较直观,针对不同的问题可以选择不同的力学定理,在一般情况下利用普遍定理可以得到大多数动力学系统的数学模型。
1)动量定理与质心运动定理:设系统在任意瞬时的动量矢为K,作用在系统上的外力矢量和为∑i F ,则任意瞬时的动量对时间的导数等于作用在系统中所有外力的矢量和构成了动量定理。
∑=F dtdK(2-1)通常将该式投影到直接坐标轴系、自然坐标轴系等,(更详细的情况请参阅理论力学有关知识)利用质心坐标的计算表达式,可以将动量定理转化为质心运动定理,即:i c F a M ∑= 或: i ci i F a m∑∑= (2-2)其中:M 是系统的总质量,c a 是系统的质心;i m 是分刚体是质心,ci a 是分刚体的质心。
2) 动量矩定理 : 系统在任意瞬时的动量矩对时间的导数等于作用在系统中所有外力矩的矢量和。
∑=)(00F M dtdH (2-3) 其中,0H 是系统对固定点o 的动量矩, )(F M O 力F 对O 点的矩.除了对固定点的动量矩定理外,还有对质心的动量矩定理,对速度瞬心的动量矩定理和对加速度瞬心的动量矩定理。
3) 动能定理 : 动能定理的导数形式:系统在任意瞬时的动能对时间的导数等于作用在系统中所有力的功率的代数和。
∑=N dtdT(2-4) 动能定理的积分形式:系统在任意两瞬时的动能的变化等于作用在系统中所有力的功的代数和。
∑=-W T T 122 动力学普遍方程将达朗伯原理与虚位移原理相结合,得到了建立动力学模型的另一种方法。
1) 达朗伯原理 达朗伯原理提供了研究动力学问题的一个新的方法,即借助于惯性力( a m Q-=)的概念,可用研究静力学平衡的方法来研究动力学问题,这种方法常称为动静法。
即:在任意时刻,质点在主动力、约束力和惯性力的主矢作用下处于平衡;0=++∑∑∑i i i Q N F(2-5)以及主动力、约束力和惯性力对某点的矩矢等于零,即:0)()()(=++∑∑∑i O i O i O Q M N M F M通常先计算惯性力的主矢和主矩,从而得到质点系的达朗伯原理。
2) 虚位移原理虚位移原理本身是通过虚功的引入,提出了求解静力学问题的一种方法,它与达朗伯原理相结合得到了建立动力学模型的另一种方法。
对于理想约束的完整系统,质点(质点系)在其给定位置上处于平衡的必要充分条件是作用在该质点(质点系)上的所有主动力i F 在其作用点的虚位移i r δ上所做的虚功和等于零,即:0=⋅∑i i r Fδ或0)(=⋅+⋅+⋅∑i iz i iy i ix z F y F x F δδδ3) 动力学的普遍方程受理想约束的系统,作用在质点系上的所以主动力和惯性力在各自的虚位移上所做的虚功和等于零,即:0)(1=-∑=r a m F i i i niδ或0])()()[(1=-+-+-∑=i i i zi i i i yi i i i xi ni z zm F y y m F x x m F δδδ 在具体应用这个方程的时候,可以先引入广义坐标,使得问题处理简单。
例2-1 质量为m 均质的杆可以绕O 轴定动,试求系统做微幅振动时的微分方程。
解:杆绕O 轴做定轴转动,水平位置为系统的平衡状态,取杆绕O 轴转动的角度ϕ为坐标,可以方便的使用动量矩定理来建立动力学方程。
(假定在微小转动情况下)a a k a c a t f J 3)33()(ϕϕϕ+-= 这里J 是杆绕O 轴转动的转动惯量。
这是关于ϕ的二阶线性微分方程。
如果不计杆的质量,则微分方程为:)(99t f ka ca =+ϕϕ这个方程是关于ϕ的一阶线性微分方程,称该系统模型为一阶系统。
例2-2 悬浮摆的动力学建模 下图所示为小型起重机简图,21,m m 是吊车和吊重的质量,吊绳长为l 且不计质量,吊车的驱动力为F ,考虑轨道的阻力为xc ,试以θ,x 为广义坐标,建立系统的动力学控制方程。
利用水平方向的质心运动定理,即:(1) )sin (2221x c F l x dtd m xm -=++θ 或: x c - )sin cos (221F l l x m x m =-++θθθθ 重物做平面曲线运动,则可以直接利用牛顿定律得到切线方向的动力学方程:(2) sin )cos (22θθθg m xl m -=+ (1),(2)两式是耦合的非线性动力学方程。
当系统被限制在0=θ附近运动时,可将其在0=θ处线性化处理,则可以得到系统的方程为:))(221F l m x c x m m =-++θ )(221F l l x m x m =-++θθθ当给定)(t F F =时,可以建立仿真模型。
请读者考虑,如果要考虑摆杆的质量,则动力学方程如何?例2-3: 车辆悬架系统的动力学模型考虑图2.2所示的汽车悬架系统示意图。
设计悬架缓冲系统的2211,;,c k c k 的目的是减小车辆在崎岖道路上行驶时产生的震动,因为道路表面的不平坦会引起悬架沿垂直方向的移动和绕某个轴的转动。
图2.2悬架系统示意图 图2.3架系统的受力分析示意图我们将整个系统的质量中心作为坐标的原点,因此系统在不平道路上的振动运动可以看作是质心的沿垂直方向的平移运动以及绕质心的旋转运动。
车架质量为m,转动惯量为J 。
输入车轮的位置信息1y 、2y 表明路况信息。
假设每个车轴的缓冲系统由具有阻尼特性的弹簧构成。
忽略轮胎的质量,每个车轮受到的外力为弹簧弹力与阻尼力之和,即)()()(1111A A A A y k yc s y k dt dc F +=+= )()()(2222B B B B y k yc s y k dtdc F +=+= 其中:1y a y y A -+=ϕ 2y b y y B --=ϕA y 和B y 分别表示每个弹簧距离参考位置的瞬时距离。
代入上式后))((111y a y k dt dc F A -++=ϕ))((222y b y k dt dc F B --+=ϕ根据质心运动与相对于质心的动量矩定理得:B A F F dty d M --=22或者:)()()()(22221111y b y k y b y c y a y k y a y c ym -------+--+-=ϕϕϕϕ 整理后得到:2211221121212121)()()()(y k y k y c yc b k a k b c a cy k k y c c ym +++=-+-+++++ ϕϕ用)(t y 和)(t ϕ分别表示系统质心的平移位移和沿质心的旋转角度。
上式中假定在很小的角度位置条件下满足ϕϕ≈sin ,并且ϕ取顺时针的旋转方向为正方向。
再根据系统相对于质心的动量矩定理可得:a y +12ϕb -a Fb F a F b F dtd J ab A B -≈-=ϕϕϕcos cos 22 其中J 是车驾相对于质心的转动惯量,将上式整理后可得: a y a y k dt dc b y b y k dtd c dtd J ))(())((11122222-++---+=ϕϕϕ或:221122112121222112)()()()(by k ay k y b c yca y b k a k a k b k y c c a c b c J -+-=-+++-+++ ϕϕϕ将系统的动力学方程写成矩阵形式:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡21222112112122212112221121122211211 00y y F F F F y y E E E E y C C C C y B B B B y J m ϕϕϕ简写为:⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡2121][][][][][y y F y y E y C y B y A ϕϕϕ其中:⎥⎦⎤⎢⎣⎡=J m A 00 ][⎥⎦⎤⎢⎣⎡+--+=b c a c b c a c b c a c c c B 21212121 ][ ⎥⎦⎤⎢⎣⎡+--+=b k a b kk a k b k a k k k C 21212121][ ⎥⎦⎤⎢⎣⎡=b c a c c c E 2121- ][ ⎥⎦⎤⎢⎣⎡=b k a k k k F 2121-][ ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡----21121111][][][][][][][][y y F A y y E A y C A y B A y ϕϕϕ 当][A 为非奇异阵时,可以通过矢量信号我们可以得到系统的仿真模型如(图2-5)。