伺服,步进电机与机械传动的选型计算表
- 格式:xls
- 大小:406.50 KB
- 文档页数:4
步进电机——步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
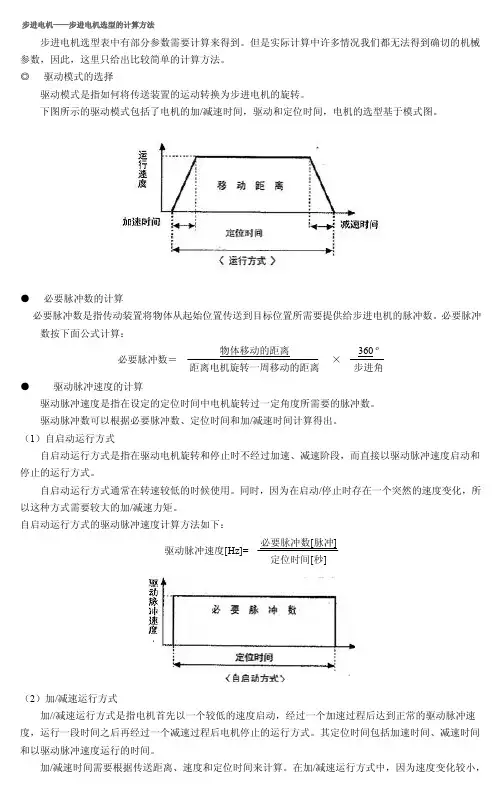
◎驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数[脉冲] 定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 定位时间[秒]-加/减速时间[秒]◎电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(T L)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
步进电机——步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
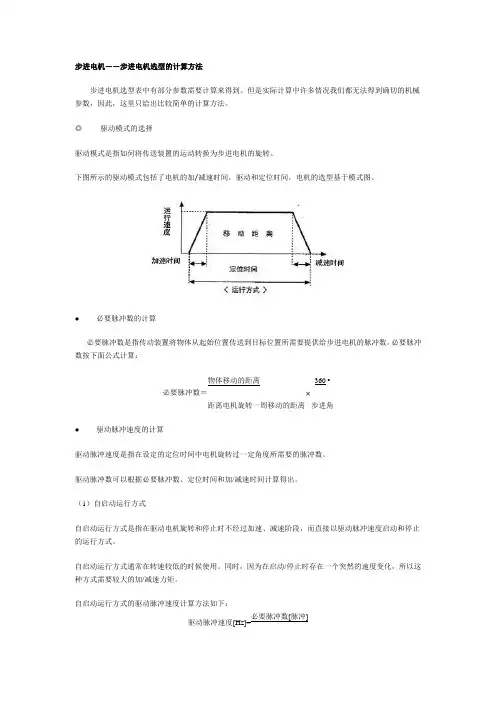
◎驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o 步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]=必要脉冲数[脉冲]定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒]驱动脉冲速度[Hz]=定位时间[秒]-加/减速时间[秒]◎电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
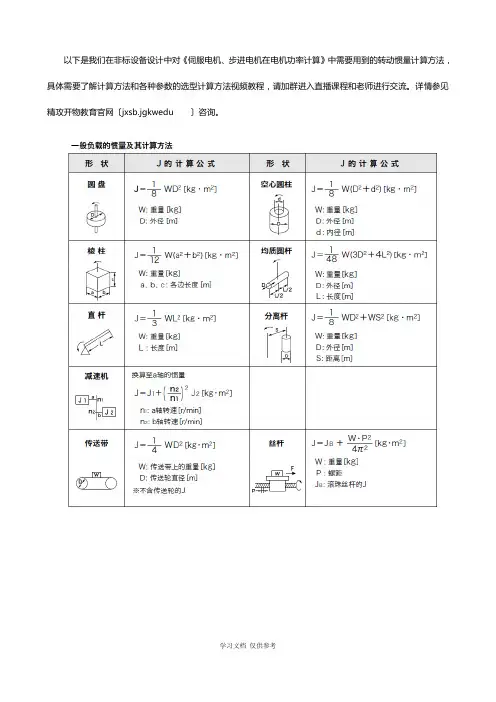
以下是我们在非标设备设计中对《伺服电机、步进电机在电机功率计算》中需要用到的转动惯量计算方法,具体需要了解计算方法和各种参数的选型计算方法视频教程,请加群进入直播课程和老师进行交流。
详情参见精攻开物教育官网〔jxsb.jgkwedu 〕咨询。
1. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD Jπ)(1078.0264s cm kgf L D ⋅⋅⨯-M-圆柱体质量(kg); D-圆柱体直径(cm);L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:DML2iJsJ =(kgf ·cm ·s 2) J s –丝杠转动惯量(kgf ·cm ·s 2);i-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量g w22⎪⎭⎫ ⎝⎛⋅=n v J π gw2s 2⎪⎭⎫ ⎝⎛=π (kgf ·cm ·s 2)v -工作台移动速度(cm/min);n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J i J J S tJ 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf ·cm ·s 2); J s -丝杠转动惯量(kgf ·cm ·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量2gw R J =(kgf ·cm ·s 2)R-齿轮分度圆半径(cm); w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫ ⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf ·cm·s 2);R-齿轮z 分度圆半径(cm);w-工件及工作台重量(kgf)。
步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵转的现象,停止时转速过高易出现过冲的现象,所以为保证其控制精度,应处理好升、降速问题.交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。
六、速度响应性能不同步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。
交流伺服系统的加速性能较好,以京伺服(KINGSERVO)400W交流伺服电机为例,从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合.综上所述,交流伺服系统在许多性能方面都优于步进电机.但在一些要求不高的场合也经常用步进电机来做执行电动机。
所以,在控制系统的设计过程中要综合考虑控制要求、成本等多方面的因素,选用适当的控制电机。
1.负载惯量的计算.由电机驱动的所有运动部件,无论旋转运动的部件,还是直线运动的部件,都成为电机的负载惯量.电机轴上的负载总惯量可以通过计算各个被驱动的部件的惯量,并按一定的规律将其相加得到.1)圆柱体惯量如滚珠丝杠,齿轮等围绕其中心轴旋转时的惯量可按下面公式计算: J=(πγ/32)*D4L(kg cm2)如机构为钢材,则可按下面公式计算: J=(0.78*10—6)*D4L(kg cm2)式中:γ材料的密度(kg/cm2) D圆柱体的直经(cm) L圆柱体的长度(cm)2)轴向移动物体的惯量工件,工作台等轴向移动物体的惯量,可由下面公式得出: J=W*(L/2π)2 (kg cm2)式中: W直线移动物体的重量(kg) L电机每转在直线方向移动的距离(cm)3)圆柱体围绕中心运动时的惯量如图所示: 圆柱体围绕中心运动时的惯量属于这种情况的例子:如大直经的齿轮,为了减少惯量,往往在圆盘上挖出分布均匀的孔这时的惯量可以这样计算: J=Jo+W*R2(kg cm2)式中:Jo为圆柱体围绕其中心线旋转时的惯量(kgcm2) W圆柱体的重量(kg) R旋转半径(cm)4)相对电机轴机械变速的惯量计算将上图所示的负载惯量Jo折算到电机轴上的计算方法如下: J=(N1/N2)2Jo 式中:N1 N2为齿轮的齿数2. 53。
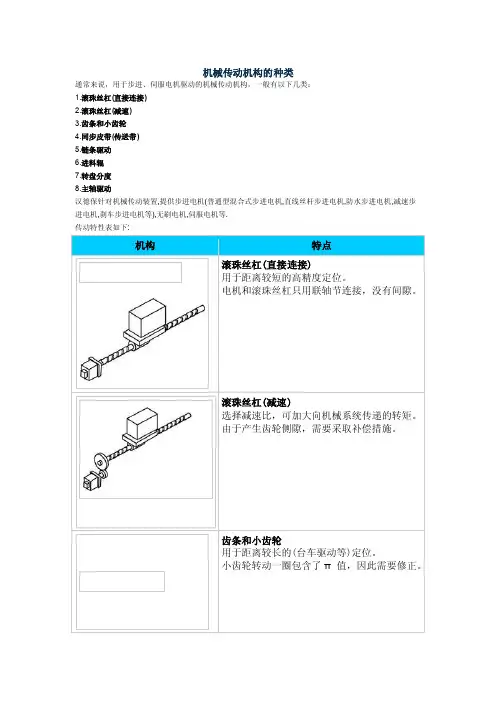
机械传动机构的种类通常来说,用于步进、伺服电机驱动的机械传动机构,一般有以下几类:1.滚珠丝杠(直接连接)2.滚珠丝杠(减速)3.齿条和小齿轮4.同步皮带(传送带)5.链条驱动6.进料辊7.转盘分度8.主轴驱动汉德保针对机械传动装置,提供步进电机(普通型混合式步进电机,直线丝杆步进电机,防水步进电机,减速步进电机,刹车步进电机等),无刷电机,伺服电机等.传动特性表如下:同步皮带与链条比较,形态上的自由度变大。
主要用于轻载。
皮带轮转动一圈的移动量中包含需要修正。
永磁交流伺服电机位置反馈传感器检测相位与电机磁极相位的对齐方式2008-11-07 来源:internet 浏览:504主流的伺服电机位置反馈元件包括增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等。
为支持永磁交流伺服驱动的矢量控制,这些位置反馈元件就必须能够为伺服驱动器提供永磁交流伺服电机的永磁体磁极相位,或曰电机电角度信息,为此当位置反馈元件与电机完成定位安装时,就有必要调整好位置反馈元件的角度检测相位与电机电角度相位之间的相互关系,这种调整可以称作电角度相位初始化,也可以称作编码器零位调整或对齐。
下面列出了采用增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等位置反馈元件的永磁交流伺服电机的传感器检测相位与电机电角度相位的对齐方式。
增量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ 输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V 出,将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
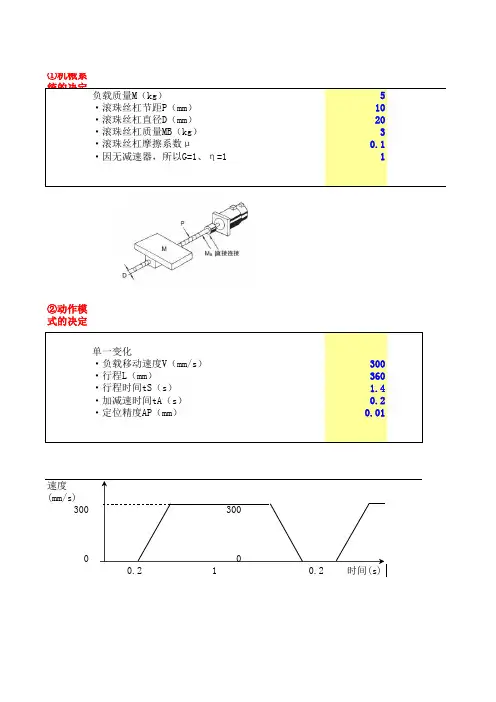
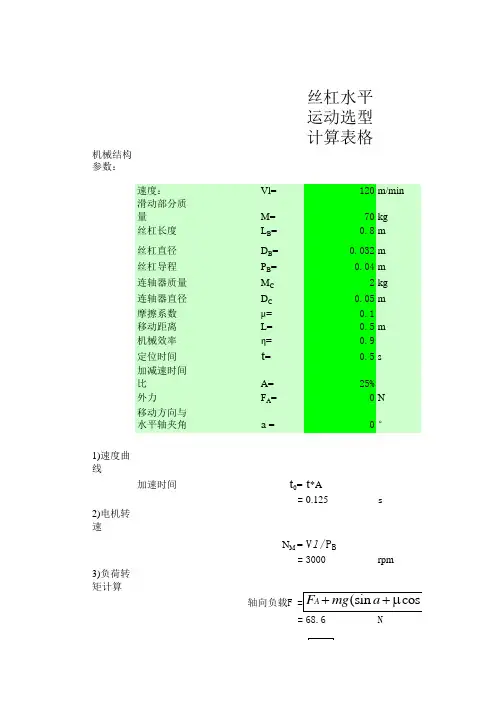
J 0 =铁Jx =铝Jy =黄铜m =尼龙d0 =外径(m)d1 =外径(m)pi l =长度(m)注:国际单位外径d 0(mm)50*0.05m 内径d 1(mm)0*0m 长度L(mm)密度ρ(kg/m 3)7800*重心线与旋转轴线距离e (mm)0*0m计算结果:0.15315251物体质量m(kg)0.15315物体惯量(kg.cm 2)0.478593754.786E-05kg.m 2外径d 0(mm):200*0.2m 内径d 1(mm):100*0.1m 长度L(mm):400*0.4m密度ρ(kg/m 3):7900重心线与旋转轴线距离e (mm)100*0.1m计算结果:74.455683物体质量m(kg)00物体惯量(kg.cm 2)0kg.m 2不同形状物体惯量计算x 0轴(通过重心的轴)的惯性惯量 [kg·m 2]x轴的惯性惯量 [kg·m2]y轴的惯性惯量 [kg·m2]圆柱体惯量计算-圆柱体长度方向中心线和旋转中心线平行圆柱体惯量计算-圆柱体长度方向中心线和和旋转中心线垂直方形物体惯量计算质量(kg)长度x(mm):850*0.85m 宽度y(mm):950*0.95m 高度z(mm):85*0.085m密度ρ(kg/m 3):7900重心线与旋转轴线距离e (m)600*0.6m计算结果:542.23625物体质量m(kg)35物体惯量(kg.cm 2)173395.83317.339583kg.m 2直径d(mm)80*0.08m 厚度h(mm)30*0.03m密度ρ(kg/m 3)7900重心线与旋转轴线距离e (mm)0*0m计算结果:质量0.56物体质量m(kg)35物体惯量(kg.cm 2)2800.028kg.m 2物体质量m(kg)1000*物体惯量(kg.cm 2)9.118921930.0009119kg.m2惯量J 0(kg.cm 2)1354*0.1354kg.m2质量m(kg)重心线与旋转轴线距离e (mm)600*6m直线运动物体惯量计算直接惯量计算电机每转1圈物体直线运动量A (m)饼状物体惯量计算0.006*2()2A J m π=2222,53mr mr (注明:实心球惯量=薄壁球惯量=)计算结果:质量m1(kg)35惯量J1(kg.cm2)12735412.7354kg.m27.9x103kg/m3 2.8x103kg/m3 8.5x103kg/m3 1.1x103kg/m33.14159*为必填项。
7.3.1 认知步进电机及驱动器1、步进电动机简介步进电动机是将电脉冲信号转换为相应的角位移或直线位移的一种特殊执行电动机。
每输入一个电脉冲信号,电机就转动一个角度,它的运动形式是步进式的,所以称为步进电动机。
(1)步进电动机的工作原理下面以一台最简单的三相反应式步进电动机为例,简介步进电机的工作原理。
图7-10是一台三相反应式步进电动机的原理图。
定子铁心为凸极式,共有三对(六个)磁极,每两个空间相对的磁极上绕有一相控制绕组。
转子用软磁性材料中制成,也是凸极结构,只有四个齿,齿宽等于定子的极宽。
图7-10 三相反应式步进电动机的原理图当A相控制绕组通电,其余两相均不通电,电机内建立以定子A相极为轴线的磁场。
由于磁通具有力图走磁阻最小路径的特点,使转子齿1、3的轴线与定子A相极轴线对齐,如图7-10(a)所示。
若A相控制绕组断电、B相控制绕组通电时,转子在反应转矩的作用下,逆时针转过30°,使转子齿2、4的轴线与定子B相极轴线对齐,即转子走了一步,如图7-10(b)所示。
若在断开B相,使C相控制绕组通电,转子逆时针方向又转过30°,使转子齿1、3的轴线与定子C相极轴线对齐,如图7-10(c)所示。
如此按A—B—C—A的顺序轮流通电,转子就会一步一步地按逆时针方向转动。
其转速取决于各相控制绕组通电与断电的频率,旋转方向取决于控制绕组轮流通电的顺序。
若按A—C—B—A的顺序通电,则电动机按顺时针方向转动。
上述通电方式称为三相单三拍。
“三相”是指三相步进电动机;“单三拍”是指每次只有一相控制绕组通电;控制绕组每改变一次通电状态称为一拍,“三拍”是指改变三次通电状态为一个循环。
把每一拍转子转过的角度称为步距角。
三相单三拍运行时,步距角为30°。
显然,这个角度太大,不能付诸实用。
如果把控制绕组的通电方式改为A→AB→B→BC→C→CA→A,即一相通电接着二相通电间隔地轮流进行,完成一个循环需要经过六次改变通电状态,称为三相单、双六拍通电方式。
步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
2. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1Teq1amax f 0T =T +T +T (4-8)式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ;f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ;0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ⋅;ε——电动机转轴的角加速度,单位为2/rad s ;m n ——电动机的转速,单位r/min ;a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2F i πη摩h P (4-10)式中 F 摩——导轨的摩擦力,单位为N ;h P ——滚珠丝杠导程,单位为m ;η——传动链总效率,一般取0.70.85η=;i ——总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
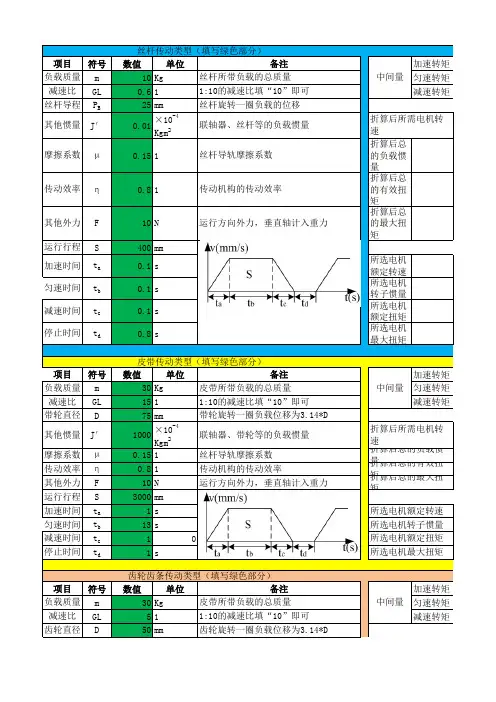
运动控制系统常用计算方法(一)负载扭矩计算方法步进电机和交流伺服电机是运动控制系统中最常用的两种执行电动机。
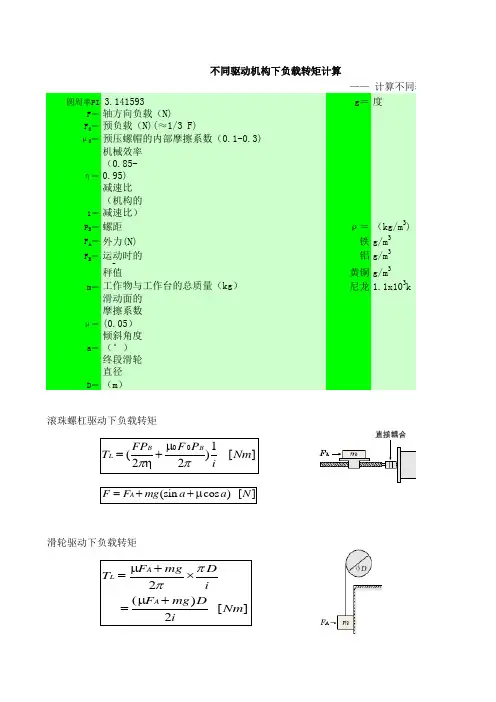
在电机选型过程中,必须首先计算出负载通过机械传动系统对电机轴的折算扭矩(T折),下面就几中常见的机械传动方式介绍折算扭矩(T折)的计算过程。
1、重物提升T折= (m×g×D) /(2×i) [N.m]2、丝杠螺母传动T折= 1/I((F×t)/(2×π ×η)+Tb) [N.m] F=F0+μmg [N]3、同步带或齿轮齿条传动T折=(F×D)/( 2×i ×η) [N.m] F=F0+μmg [N](二)负载转动惯量计算方法在运动控制系统设计中,负载通过机械传动系统对电机轴的折算转动惯量(J折)也是常需考虑的因素,这是因为:Ⅰ) 为了提高系统的动态响应性能,应使负载折算到电机轴上的折算转动惯量与电机轴本身转动惯量之间有一适当匹配,这通常通过合理的机械减速机构实现。
Ⅱ) 在电机选型过程中,特别是在加/减速时间很短(快速启停)的应用场合中,常需计算加速扭矩,这时也需用到负载对电机轴的折算惯量。
以下就几种常用的传动方式,介绍负载通过机械传动系统对电机轴的折算转动惯量J 折的计算方法。
1、齿轮或带轮传动J折=J1/ i2+J2[kg.m2]2、丝杠螺母传动J折=m×(t/2π) 2 [kg.m2]这种直线运动物体对电机轴的转动惯量折算方法只要遵循“具有等效转动惯量的等效构件的动能等于远机构的动能”这一基本原理即可得出,亦即:(三)几种常见几何体转动惯量的计算方法J L=J C+ML2式中:J L:物体对于轴0—0的转动惯量J C:物体对于平行轴0’—0’的转动惯量M:物体质量L :两平行轴的距离刚体对于任何轴的转动惯量,等于刚体对于通过质心并与该轴平行的轴的转动惯量加上刚体的质量与这两轴间的距离平方的乘积(四)电机工作扭矩计算方法在最后选取电机时,除了前面计算出的折算负载扭矩外,还需考虑启停时的惯性过程带来的惯性扭矩Ta,尤其在要求快速启停或负载转动惯量特别大时,Ta可能占电机工作扭矩的相当部分比例,应仔细核算。
常识
一.电机温升
电机温度是指电机各部分实际发热温度,它对电机的绝缘材影响很大,温度过高会使绝缘老化缩短电动为使绝缘不致老化和破坏,对电机绕组等各部分温度作了一定的限制,这个温度限制就是电机的允许温还与外界条件有关,温升就是电动机温度比周围环境温度高出的数值.
θ=T2-T1
θ-------温升
T1-------实际冷却状态下的绕组温度(即环境温度);
T2-------发热状态下绕组温度
二.电机功率
1. 根据电源电压、使用条件、拖动对象选择电机.要求电源电压与电机额定电压相符.
2. 根据安装地点和工作环境选择不同型式的电机.
3. 根据容量、效率、功率因数、转数选择电机.如果容量选择过小,就会发生长期过载现象,影响电动
如果容量选择过大,电机的输出机械功率不能充分利用,功率因数也不高.因为电机的功率因数和效
式中:
P-----电机的功率(KW);
P1----生产机械功率(KW);
η1----生产机械本身效率;
η2 ----电机效率.
上式计算出的功率不一定与产品规格相同,所以选择电机的额定功率(P1)应等于或稍大
常识
一.电机温升
电机温度是指电机各部分实际发热温度,它对电机的绝缘材影响很大,温度过高会使绝缘老
为使绝缘不致老化和破坏,对电机绕组等各部分温度作了一定的限制,这个温度限制就是电
还与外界条件有关,温升就是电动机温度比周围环境温度高出的数值.
θ=T2-T1
θ-------温升
T1-------实际冷却状态下的绕组温度(即环境温度);
T2-------发热状态下绕组温度
二.电机功率
1. 根据电源电压、使用条件、拖动对象选择电机.要求电源电压与电机额定电压相符.
2. 根据安装地点和工作环境选择不同型式的电机.
3. 根据容量、效率、功率因数、转数选择电机.如果容量选择过小,就会发生长期过载现象
如果容量选择过大,电机的输出机械功率不能充分利用,功率因数也不高.因为电机的功
式中:
P-----电机的功率(KW);
P1----生产机械功率(KW);
η1----生产机械本身效率;
η2 ----电机效率.
上式计算出的功率不一定与产品规格相同,所以选择电机的额定功率(P1)应等于或
会使绝缘老化缩短电动机寿命,甚至导致绝缘破坏.
个温度限制就是电机的允许温度.电机的各部温度的高低
额定电压相符.
会发生长期过载现象,影响电动机寿命甚至烧毁.
不高.因为电机的功率因数和效率是随着负载变化的.
)应等于或稍大于计算所得的功率
响很大,温度过高会使绝缘老化缩短电动机寿命,甚至导致绝缘破坏.的限制,这个温度限制就是电机的允许温度.电机的各部温度的高低
机额定电压相符.
择过小,就会发生长期过载现象,影响电动机寿命甚至烧毁.
率因数也不高.因为电机的功率因数和效率是随着负载变化的.率(P1)应等于或稍大于计算所得的功率。