第六章 力、扭矩、压力的测量讲解
- 格式:ppt
- 大小:631.50 KB
- 文档页数:42
第六章 机器人运动学及动力学6.1 引论到现在为止我们对操作机的研究集中在仅考虑动力学上。
我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。
本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。
机构动力学是一个已经写出很多专著的领域。
的确,人们可以花费以年计的时间来研究这个领域。
显然,我们不可能包括它所应有的完整的内容。
但是,某种动力学问题的方程式似乎特别适合于操作机的应用。
特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。
有两个与操作机动力学有关的问题我们打算去解决。
向前的动力学问题是计算在施加一组关节扭矩时机构将怎样运动。
也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ和Θ。
这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ和Θ,我们欲求出所需要的关节扭矩矢量τ。
这种形式的动力学对操作机的控制问题有用。
6.2 刚体的加速度现在我们把对刚体运动的分析推广到加速度的情况。
在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。
即BB Q Q BBQ Q 0V ()V ()d V V lim dt t t t t t∆→+∆-==∆ (6-1)和AA Q Q AAQ Q 0()()d lim dt t t t t t∆→Ω+∆-ΩΩ=Ω=∆ (6-2)正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号U A AORG V V = (6-3)和U A A ω=Ω (6-4)6.2.1 线加速度我们从描述当原点重合时从坐标架{}A 看到的矢量BQ 的速度AA B A A Q B Q B B V V BR R Q =+Ω⨯ (6-5)这个方程的左手边描述AQ 如何随时间而变化。
所以,因为原点是重合的,我们可以重写(6-5)为A AB A A B B Q B B d ()V dtB B R Q R R Q =+Ω⨯ (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。

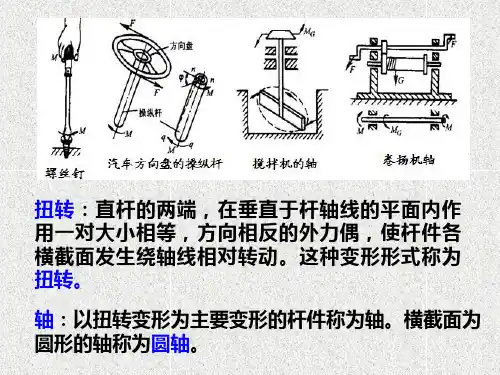

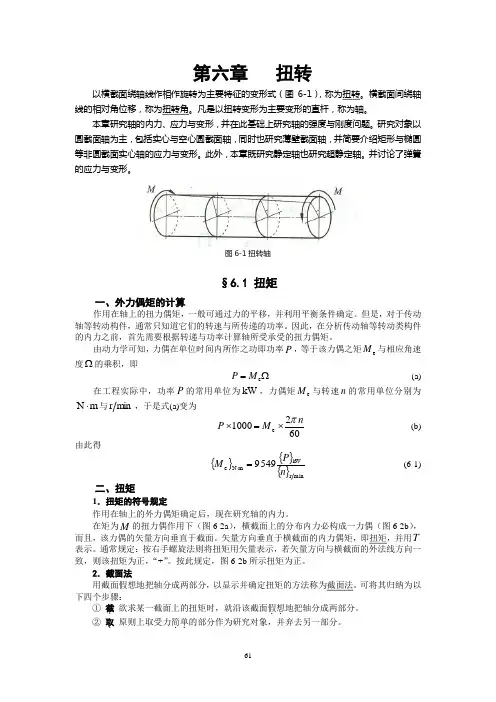
第六章 扭转以横截面绕轴线作相作旋转为主要特征的变形式(图6-1),称为扭转。
横截面间绕轴线的相对角位移,称为扭转角。
凡是以扭转变形为主要变形的直杆,称为轴。
本章研究轴的内力、应力与变形,并在此基础上研究轴的强度与刚度问题。
研究对象以圆截面轴为主,包括实心与空心圆截面轴,同时也研究薄壁截面轴,并简要介绍矩形与椭圆等非圆截面实心轴的应力与变形。
此外,本章既研究静定轴也研究超静定轴。
并讨论了弹簧的应力与变形。
图6-1扭转轴§6.1 扭矩一、外力偶矩的计算作用在轴上的扭力偶矩,一般可通过力的平移,并利用平衡条件确定。
但是,对于传动轴等转动构件,通常只知道它们的转速与所传递的功率。
因此,在分析传动轴等转动类构件的内力之前,首先需要根据转递与功率计算轴所受承受的扭力偶矩。
由动力学可知,力偶在单位时间内所作之功即功率P ,等于该力偶之矩e M 与相应角速度Ω的乘积,即Ω=e M P (a)在工程实际中,功率P 的常用单位为kW ,力偶矩e M 与转速n 的常用单位分别为m N ⋅与min r ,于是式(a)变为6021000e n M P π⨯=⨯ (b) 由此得 {}{}{}minr kW m N e 5499n P M =⋅ (6-1) 二、扭矩1.扭矩的符号规定作用在轴上的外力偶矩确定后,现在研究轴的内力。
在矩为M 的扭力偶作用下(图6-2a ),横截面上的分布内力必构成一力偶(图6-2b ),而且,该力偶的矢量方向垂直于截面。
矢量方向垂直于横截面的内力偶矩,即扭矩,并用T 表示。
通常规定:按右手螺旋法则将扭矩用矢量表示,若矢量方向与横截面的外法线方向一致,则该扭矩为正,“+”。
按此规定,图6-2b 所示扭矩为正。
2.截面法用截面假想地把轴分成两部分,以显示并确定扭矩的方法称为截面法。
可将其归纳为以下四个步骤:① 截. 欲求某一截面上的扭矩时,就沿该截面假想..地把轴分成两部分。
② 取. 原则上取受力简单..的部分作为研究对象,并弃去另一部分。
第六章水平井、大位移井摩阻扭矩分析水平井、大位移井具有长水平位移、大井斜角以及长裸眼稳斜段的特点。
大位移井钻井过程中的摩阻、扭矩的预测和控制是成功地钻成大位移井的关键和难点所在。
开展摩阻、扭矩预测技术研究,在大位移井的设计(包括钻井设备选择、轨道形式与参数、钻柱设计、管柱下入设计等)、施工(轨道控制、井下作业等)阶段都具有十分重要的意义。
第一节摩阻扭矩研究及存在的问题钻井界早就认识到摩阻扭矩预测、分析和减摩技术在大位移井中的重要性。
摩阻问题贯穿从设计到完井和井下作业的全过程,其重要性为:●根据摩阻扭矩分布设计选用钻杆强度和各钻柱组件(钻杆,钻铤和加重钻杆)分布。
●地面装备(顶驱功率和扭矩,起升能力、泵功率和排量压力)需要根据摩阻扭矩预测来选用,并考虑到预测误差需留有足够的富余能力。
●钻井液设计及润滑性要求。
在某一特定地区,使用水基钻井液钻大位移井,其水平位移受摩阻扭矩限制会有一个极限长度。
超过该极限值,靠加减摩剂维持钻井会遇到技术困难,经济效益不佳或风险大。
但是,在一定的可控制的摩阻扭矩范围内,使用水基钻井液具有显著技术经济和环保效益。
●井眼轨迹的设计和轨迹控制技术往往受摩阻扭矩限制。
在当前普遍采用的旋转导向钻具控制轨迹条件下,在扭方位或以较高井眼曲率增降井斜角的井段必须放在滑动态能钻井的深度。
●充分考虑完井、井下作业或修井可行性。
如果在钻井阶段,钻柱可旋转下入或倒划眼起出,那么就需考虑套管或尾管是否需要旋转才能下入、生产油管、连续油管或其它测试管柱能否下入等问题。
从上述分析看出,摩阻、扭矩预测的准确性至关重要,但是提高摩阻扭矩预测精度仍是大位移钻井的一个难点。
1、研究现状国内外学者对定向井、水平井、大位移井的摩阻、扭矩问题进行了大量的研究,建立了对应的力学模型。
1983年,Johansick,首先提出了在定向井中预测钻柱拉力和扭矩的柔索模型,为改进井眼轨迹设计和钻柱设计、现场事故诊断和预测提供了理论依据。