欧姆龙PLC以太网TCP命令FINS协议实验
- 格式:docx
- 大小:521.14 KB
- 文档页数:8
Fins命令+Hostlink协议通讯实验之蔡仲巾千创作一、实验配置硬件:CPU单元:CJ2M-CPU35RS232串口选件板:CP1W-CIF01USB转232连接电缆:CS1W-CIF31软件:CX-Programmer、串口调试助手UartAssist二、PC主机直连PLC串口命令帧格式介绍命令格式响应格式PC主机直连PLC的情况下,主机发送命令给PLC,发送命令格式如下:(P54)@:Hostlink协议起始代码Unit No.:单元号,对应PLC内置串口或串行通讯单元设置的Hostlink单元号。
Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~F,单位为10ms,例如设置为2,则响应等待时间为20msICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
SID:通常设置为00Fins command code:参考Fins通讯手册P125读命令:0101写命令:0102Text:具体操纵内容,读写区域、读取起始地址、数据长度等内容存储区代码:(参考Fins通讯手册 P137)DM(word):82W(bit):31W(word):B1CIO区(bit):30Tips:使用Fins指令最大可读取538个字节。
一条命令不克不及超出1114个字符。
三、串口通讯调试实例实例1——DM数据寄存器区读写实例;1、读取D0开始1个通道的值发送命令:↙(回车键)返回命令码:↙(回车键)2、读取D100开始的50个通道发送命令:↙(回车键)3、写D200开始的2个通道发送命令:@00FA00000000001028200C8000002123456780F*↙(回车键) Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~FICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
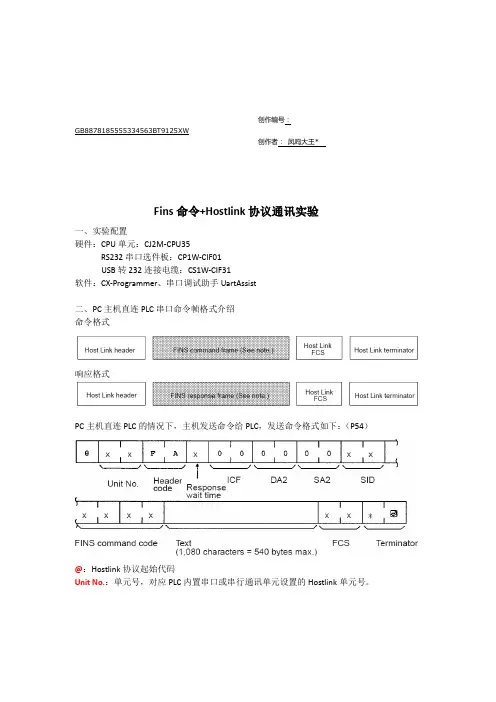
创作编号:GB8878185555334563BT9125XW创作者:凤呜大王*Fins命令+Hostlink协议通讯实验一、实验配置硬件:CPU单元:CJ2M-CPU35RS232串口选件板:CP1W-CIF01USB转232连接电缆:CS1W-CIF31软件:CX-Programmer、串口调试助手UartAssist二、PC主机直连PLC串口命令帧格式介绍命令格式响应格式PC主机直连PLC的情况下,主机发送命令给PLC,发送命令格式如下:(P54)@:Hostlink协议起始代码Unit No.:单元号,对应PLC内置串口或串行通讯单元设置的Hostlink单元号。
Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~F,单位为10ms,例如设置为2,则响应等待时间为20msICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
SID:通常设置为00Fins command code:参考Fins通讯手册P125读命令:0101写命令:0102Text:具体操作内容,读写区域、读取起始地址、数据长度等内容存储区代码:(参考Fins通讯手册P137)DM(word):82W(bit):31W(word):B1CIO区(bit):30Tips:使用Fins指令最大可读取538个字节。
一条命令不能超过1114个字符。
三、串口通讯调试实例实例1——DM数据寄存器区读写实例;1、读取D0开始1个通道的值发送命令:@00FA 000000000 0101 82 000000 0001 7C *↙(回车键)返回命令码:@00FA004000000001010000123447*↙(回车键)2、读取D100开始的50个通道发送命令:@00FA00000000001018200640000327E*↙(回车键)3、写D200开始的2个通道发送命令:@00 FA 0 00000000 0102 82 00C8 00 0002 12345678 0F*↙(回车键) Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~FICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
![基于FINS协议的OMRON PLC与上位机以太网通信的实现[多图]](https://uimg.taocdn.com/282545365a8102d276a22f4d.webp)
基于FINS协议的OMRON PLC与上位机以太网通信的实现[多图]0 引言在当代工业自动化控制系统中,可编程逻辑控制器(PLC)作为常用的现场控制设备,上位机作为数据采集及人机界面的一种已经得到广泛运用。
过去,在工程项目开发中,PLC和上位机间的通信常采用RS-232C或者RS-485串行方式,这种要领很难满足数据量大、通信距离远、实时性要求高的控制系统。
随着互联网技能的发展、普及与推广,以太网技能得到了快速的发展,其传输速率的提高和交换技能的运用,处理了以太网通信的非确定性疑问,使得工业以太网能够广泛运用于工业信息控制领域,也是工业信息控制未来的发展趋势。
FINS(factory interface network service)通信协议是欧姆龙公司开发的用于工业自动化控制网络的指令/响应系统。
运用FINS指令可实现各种网络间的无缝通信,包括用于信息网络的Etherne(以太网),用于控制网络的Controller Link 和SYSMAC LINK。
通过编程发送FINS指令,上位机或PLC就能够读写另一个PLC数据区的内容,甚至控制其运行状态,从而简化了用户程序。
FINS协议支撑工业以太网,这就为OMRON PLC与上位机以太网通信的实现提供了可能。
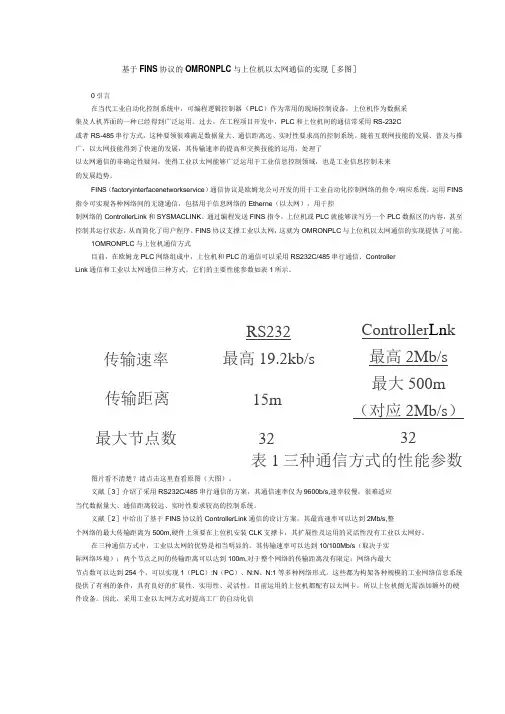
1 OMRON PLC与上位机通信方式目前,在欧姆龙PLC网络组成中,上位机和PLC的通信可以采用RS232C /485串行通信、Controller Link通信和工业以太网通信三种方式。
它们的主要性能参数如表1所示。
图片看不清楚?请点击这里查看原图(大图)。
文献[3]介绍了采用RS232C/485串行通信的方案,其通信速率仅为9600b /s,速率较慢,很难适应当代数据量大、通信距离较远、实时性要求较高的控制系统。
文献[2]中给出了基于FINS协议的Controller Link通信的设计方案,其最高速率可以达到2Mb/s,整个网络的最大传输距离为500m,硬件上须要在上位机安装CLK支撑卡,其扩展性及运用的灵活性没有工业以太网好。
欧姆龙CP1H-E和松下FP0H实现ModbusTCP以太网通信一、必备软件和硬件:1、欧姆龙CX-Programmer编程软件2、松下FPWIN GR7编程软件3、Modbus Poll调试软件4、Modbus Slave调试软件5、以太网调试助手6、欧姆龙CP1H-E系列PLC7、松下FP0H系列PLC8、无线路由器9、网线二、通信实现目的:1、欧姆龙CP1H-E读松下FP0H共计4路保持寄存器DT0~DT3,读取的4路保持寄存器数据保存至D0~D3中,使用Modbus之03功能码实现;2、欧姆龙CP1H-E写松下FP0H共计4路保持寄存器DT4~DT7,写出的4路保持寄存器数据暂存至D4~D7中,使用Modbus之16功能码实现。
三、通信连接说明:1、欧姆龙CP1H-E本体自带以太网口通过网线连接至无线路由器LAN接口;2、松下FP0H本体自带以太网口通过网线连接至无线路由器LAN 接口。
四、Modbus TCP服务器通信参数:1、Modbus TCP服务器:松下FP0H2、Modbus TCP服务器IP地址:192.168.1.1643、Modbus TPC服务器子网掩码:255.255.255.04、Modbus TCP服务器默认网关:192.168.1.15、Modbus TCP服务器端口号:502五、Modbus TCP客户端通信参数:1、Modbus TCP客户端:欧姆龙CP1H-E2、Modbus TCP客户端IP地址:192.168.1.1633、Modbus TPC客户端子网掩码:255.255.255.04、Modbus TCP客户端默认网关:192.168.1.15、Modbus TCP客户端端口号:502六、松下FP0H通信参数设置:1、松下FP0H通信参数设置如下所示:2、松下FP0H设备编号和Modbus寄存器编号、地址对应表如下所示:七、松下FP0H系列PLC逻辑编程:1、初始化时,分别给保持寄存器DT0~DT3赋值0~3,如下所示:2、初始化时,分别对保持寄存器DT4~DT7进行清零,如下所示:3、每1分钟,对DT0~DT3做加1操作,方便客户端读取数据观察变化,如下所示:4、判断DT0~DT3中的数据是否大于6000,如果大于6000,进行清零操作,如下所示:八、使用以太网调试助手测试松下FP0H之Modbus TCP服务器程序:1、Modbus之03功能码测试,读取欧姆龙CP1H-E保持寄存器D0~D3的值:以太网调试助手发送:44 44 00 00 00 06 01 01 00 00 00 04欧姆龙CP1H-E返回:44 44 00 00 00 0B 01 03 08 00 06 00 07 00 08 00 09则此时松下FP0H保持寄存器DT0、DT1、DT2、DT3的数据依次为16#0006、16#0007、16#0008、16#0009,以太网调试助手测试截图如下所示:2、测试总结:以上Modbus之03功能码测试通过,亦表明松下FP0H之Modbus TCP服务器程序正确无误。
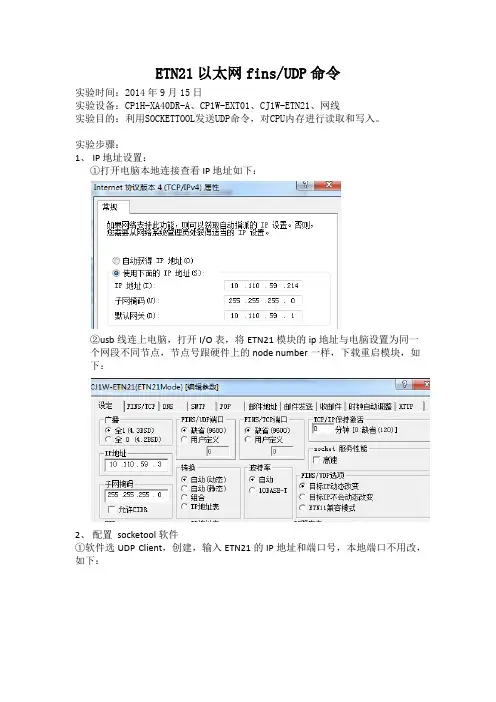
ETN21以太网fins/UDP命令
实验时间:2014年9月15日
实验设备:CP1H-XA40DR-A、CP1W-EXT01、CJ1W-ETN21、网线
实验目的:利用SOCKETTOOL发送UDP命令,对CPU内存进行读取和写入。
实验步骤:
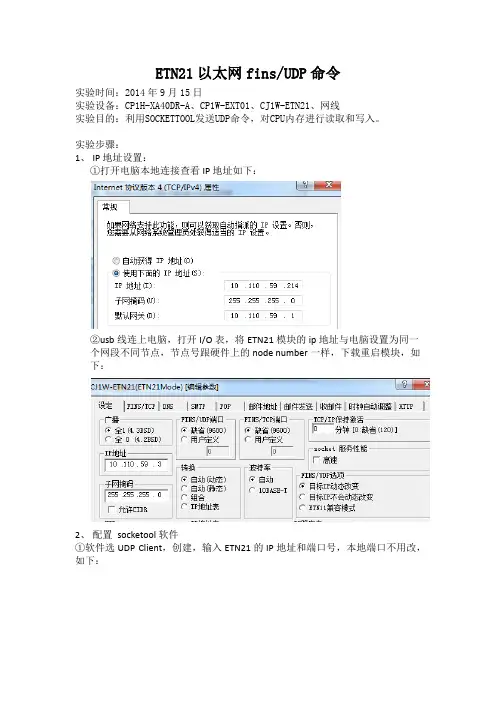
1、IP地址设置:
①打开电脑本地连接查看IP地址如下:
②usb线连上电脑,打开I/O表,将ETN21模块的ip地址与电脑设置为同一
个网段不同节点,节点号跟硬件上的node number一样,下载重启模块,如下:
2、配置socketool软件
①软件选UDP Client,创建,输入ETN21的IP地址和端口号,本地端口不用改,如下:
3、UDP命令
①命令帧如下,ETN手册W421第7-3有相关介绍,如下:
实验现象:
1、勾选16进制,输入读取命令80000200030000D600000101820000000001
(此命令读取的是D0的数据)
写入命令:80000200030000D6000001023000640100020101 800002000100003C000001023000640100020100
输出灯亮。
Response
实验总结:
1、Socket Tool 中一定要将下面以显示十六进制值打钩,否则无法正确读到数据。
2、对为操作由于命令发送是按字节发送,故对单个字置1或0时要用01或者
00。
基于FINS 协议的OMRONPLC 与上位机以太网通信的实现[多图]0引言在当代工业自动化控制系统中,可编程逻辑控制器(PLC )作为常用的现场控制设备,上位机作为数据采 集及人机界面的一种已经得到广泛运用。
过去,在工程项目开发中,PLC 和上位机间的通信常采用RS-232C或者RS-485串行方式,这种要领很难满足数据量大、通信距离远、实时性要求高的控制系统。
随着互联网技能的发展、普及与推广,以太网技能得到了快速的发展,其传输速率的提高和交换技能的运用,处理了以太网通信的非确定性疑问,使得工业以太网能够广泛运用于工业信息控制领域,也是工业信息控制未来 的发展趋势。
FINS (factoryinterfacenetworkservice )通信协议是欧姆龙公司开发的用于工业自动化控制网络的指令/响应系统。
运用FINS 指令可实现各种网络间的无缝通信,包括用于信息网络的Etherne (以太网),用于控制网络的ControllerLink 和SYSMACLINK 。
通过编程发送FINS 指令,上位机或PLC 就能够读写另一个PLC 数据区的内容,甚至控制其运行状态,从而简化了用户程序。
FINS 协议支撑工业以太网,这就为OMRONPLC 与上位机以太网通信的实现提供了可能。
1OMRONPLC 与上位机通信方式目前,在欧姆龙PLC 网络组成中,上位机和PLC 的通信可以采用RS232C/485串行通信、Controller Link 通信和工业以太网通信三种方式。
它们的主要性能参数如表1所示。
表1三种通信方式的性能参数图片看不清楚?请点击这里查看原图(大图)。
文献[3]介绍了采用RS232C/485串行通信的方案,其通信速率仅为9600b/s,速率较慢,很难适应 当代数据量大、通信距离较远、实时性要求较高的控制系统。
文献[2]中给出了基于FINS 协议的ControllerLink 通信的设计方案,其最高速率可以达到2Mb/s,整个网络的最大传输距离为500m,硬件上须要在上位机安装CLK 支撑卡,其扩展性及运用的灵活性没有工业以太网好。
欧姆龙fins协议设置欧姆龙fins协议设置协议双方甲方:(以下简称公司),法定代表人:XXX,注册地址:XXX乙方:(以下简称客户),注册地址:XXX鉴于公司拥有欧姆龙fins(以下简称协议)的信息通信技术,客户希望使用该技术以提升自身工业控制系统(以下简称ICS)的性能,故双方就相关业务事宜达成如下协议:第一条双方的基本信息公司承诺其为一家合法合规的公司,具备提供欧姆龙fins 技术的资格和能力。
客户承诺其为一家合法合规的企业,有自主ICs控制系统运作的需求和实际使用情况。
第二条身份、权利、义务2.1 公司的权利2.1.1 欧姆龙fins信息通信技术的所有权和知识产权;2.1.2 维护和更新欧姆龙fins技术的权利;2.1.3 收取由客户使用欧姆龙fins技术产生的相应服务费用;2.2 公司的义务2.2.1 提供稳定、可靠的欧姆龙fins技术服务;2.2.2 防止其泄露客户数据和隐私;2.2.3 依据协议向客户提供相应的技术支持和服务。
2.3 客户的权利2.3.1 将欧姆龙fins技术用于自主实际ICs控制系统中;2.3.2 获得相应的技术支持和服务;2.4 客户的义务2.4.1 根据公司要求支付相应的服务费用;2.4.2 防止欧姆龙fins技术的抄袭、盗用和非法分发;2.4.3 保密相关技术和商业信息,并遵守相关法律法规。
第三条履行方式3.1 公司承诺提供欧姆龙fins技术,保证技术的稳定和优质;3.2 客户支付相应的服务费用,确保服务的稳定和长久地进行。
第四条期限4.1 本协议自双方签署之日开始生效,有效期为三年;4.2 双方有权在协议有效期届满前,自主决定是否续签。
第五条违约责任5.1 若任何一方违反了本协议中的条款和内容,对方有权解除协议,并向其追究违约责任;5.2 对于因双方违约所导致的任何损失,由违约方赔偿受损方。
第六条遵守法律法规6.1 双方同意严格遵守中国法律法规,不得非法行为和违法行动;6.2 对于双方的合法权益,如有涉及到法律法规或其他政策规定的相关事宜,双方将积极配合处理。
ETN21以太网fins/UDP命令
实验时间:2014年9月15日
实验设备:CP1H-XA40DR-A、CP1W-EXT01、CJ1W-ETN21、网线
实验目的:利用SOCKETTOOL发送UDP命令,对CPU内存进行读取和写入。
实验步骤:
1、IP地址设置:
①打开电脑本地连接查看IP地址如下:
②usb线连上电脑,打开I/O表,将ETN21模块的ip地址与电脑设置为同一
个网段不同节点,节点号跟硬件上的node number一样,下载重启模块,如下:
2、配置socketool软件
①软件选UDP Client,创建,输入ETN21的IP地址和端口号,本地端口不用改,如下:
3、UDP命令
①命令帧如下,ETN手册W421第7-3有相关介绍,如下:
实验现象:
1、勾选16进制,输入读取命令800D600000101
(此命令读取的是D0的数据)
写入命令:800D601
8003C00
输出灯亮。
Response
实验总结:
1、Socket Tool 中一定要将下面以显示十六进制值打钩,否则无法正确读到数据。
2、对为操作由于命令发送是按字节发送,故对单个字置1或0时要用01或者
00。
欧姆龙fins指令[欧姆龙fins指令]欧姆龙FINS(Factory Automation Network Service)是一种通信协议,用于在工业自动化系统中实现设备间的通信。
FINS提供了许多命令和功能,以便于数据传输和控制操作。
本文将一步一步回答关于欧姆龙FINS指令的一些问题,并探讨其在工业自动化中的应用。
第一部分:欧姆龙FINS概述1. 什么是欧姆龙FINS?欧姆龙FINS是欧姆龙公司开发的一种通信协议,用于实现工业自动化设备之间的数据传输和控制操作。
它被广泛应用于工业自动化系统中,如机器人控制、PLC控制、工厂自动化等领域。
2. 欧姆龙FINS的特点是什么?欧姆龙FINS具有以下特点:- 高性能:FINS协议在数据传输和控制操作方面具有高效、快速和可靠的特性。
- 可扩展性:FINS协议支持多种通信介质和网络拓扑,可以灵活适应不同的工业环境。
- 强大的功能:FINS协议提供了多种指令和功能,能够满足不同工业自动化系统的需求。
第二部分:欧姆龙FINS指令的基本用法3. 如何建立和维护FINS连接?建立和维护FINS连接需要使用一系列FINS指令,如CMND (Command)和CMND_END(Command End)。
首先,客户端发送一条连接请求指令给服务器端,服务器端接收请求后发送确认指令,在建立连接后,客户端和服务器端可以通过发送、接收数据指令来进行数据交换。
4. 如何进行数据读取和写入?数据读取和写入是使用FINS指令进行的重要操作。
对于数据读取,可以使用RD(Read)指令,指定要读取的数据地址和长度。
对于数据写入,可以使用WR(Write)指令,指定要写入的数据地址和数据值。
5. 如何进行远程控制和远程监视?FINS协议提供了远程控制和远程监视功能。
对于远程控制,可以使用WR(Write)指令写入控制命令到特定地址,以实现设备的远程控制。
对于远程监视,可以使用RD(Read)指令读取特定地址的数据,以获取设备的状态信息。
![基于FINS协议的OMRON-PLC与上位机以太网通信的实现[多图]](https://uimg.taocdn.com/7cb109f79ec3d5bbfd0a74e3.webp)
基于FINS协议的OMRON PLC与上位机以太网通信的实现[多图] 引言在当代工业自动化控制系统中,可编程逻辑控制器(PLC)作为常用的现场控制设备,上位机作为数据采集及人机界面的一种已经得到广泛运用。
过去,在工程项目开发中,PLC和上位机间的通信常采用RS-232C或者RS-485串行方式,这种要领很难满足数据量大、通信距离远、实时性要求高的控制系统。
随着互联网技能的发展、普及与推广,以太网技能得到了快速的发展,其传输速率的提高和交换技能的运用,处理了以太网通信的非确定性疑问,使得工业以太网能够广泛运用于工业信息控制领域,也是工业信息控制未来的发展趋势。
FINS(factory interface network service)通信协议是欧姆龙公司开发的用于工业自动化控制网络的指令/响应系统。
运用FINS指令可实现各种网络间的无缝通信,包括用于信息网络的Etherne(以太网),用于控制网络的Controller Link 和SYSMAC LINK。
通过编程发送FINS指令,上位机或PLC就能够读写另一个PLC数据区的内容,甚至控制其运行状态,从而简化了用户程序。
FINS协议支撑工业以太网,这就为OMRON PLC与上位机以太网通信的实现提供了可能。
1 OMRON PLC与上位机通信方式目前,在欧姆龙PLC网络组成中,上位机和PLC的通信可以采用RS232C /485串行通信、Controller Link通信和工业以太网通信三种方式。
它们的主要性能参数如表1所示。
图片看不清楚?请点击这里查看原图(大图)。
文献[3]介绍了采用RS232C/485串行通信的方案,其通信速率仅为9600b /s,速率较慢,很难适应当代数据量大、通信距离较远、实时性要求较高的控制系统。
文献[2]中给出了基于FINS协议的Controller Link通信的设计方案,其最高速率可以达到2Mb/s,整个网络的最大传输距离为500m,硬件上须要在上位机安装CLK支撑卡,其扩展性及运用的灵活性没有工业以太网好。
OMRON FINS通讯1. OMRON FIN通讯1.1 FINS通讯概述FINS(factory in terface network service) 通信协议是欧姆龙公司幵发的用于工业自动化控制网络的指令/响应系统。
运用FINS指令可实现各种网络间的无缝通信,通过编程发送FINS指令,上位机或PLC就能够读写另一个PLC数据区的内容,甚至控制其运行状态,从而简化了用户程序。
FINS协议支持工业以太网,这就为OMRON PL与上位机以太网通信的实现提供了途径。
1.2 Fins帧的结构发送命令结构:发送命令结构:____ 命令码_____ II_____ 正文 _______响应命令结构:命令码I 结束码丨丨正文 _______命令码:01 01读数据01 02 写数据结束码:00 00无错误,否则执行出错;举例说明:要读取DM1(开始10个字的内容:存储区代码(82代表D区80代表CIO区)响应当结束码不为00 00时,则代表执行错误,应重发当前帧 2 FINS在以太网上的帧格式Fins 在以太网上帧格式比较简单,简单来说就是在上面所说的Fins帧的基础上加上以太网的包头就可以了。
具体帧格式分为UDP/IP帧格式和TCP/IP帧格式2.1 FINS UDP/IP 的帧格式帧格式:UDP/IP帧+FINS命令帧其每个字节的具体解释如下:ICF:发送接收标志字节,发送报文:ICF=80HEX响应报文:ICF二CO; RSV固定为OOHEXGCT固定为02HEXDNA目标网络号;本网络:00;远程网络:01-7F ;DA1:目标节点号;对于以太网来说,即该网络IP地址最后一位的值;DA2:目标单元号;对于CPU来说,固定为00;SNA源网络号;本网络:00 ;SA1:源节点号;IP地址最后一位的值;SA2源单元号:可设置为与目标单元号相同;SID:服务ID,响应端将接收过来的SID复制后添加到响应帧中; 举例说明:PC IP地址:PLC IP地址:如果要请求DM1(开始的10个字的内容则PC发送命令如下:源IP地址:PLC地址(IP地址最后位)而PLC返回命令如下:80 00 02 00 00 56 00 00 13 00 00 Datal —DatalO不同pic型号返回有区别,这里仅作参考实例:(读取CIO区452地址:01 C4 ;长度为1个字)发送码:80 00 02 00 20 00 00 BE 00 00 01 01 80 01 C4 00 00 01 说明80 00 02 00 消息头20 为PLC地址00 00 默认BE 为计算机地址00 00 默认01 01 命令码80读取区域01 C4 00读取地址00 01 读取长度返回码:C0 00 02 00 be 00 00 20 00 00 01 01 00 00 00 02说明:C0 00 02 00 be 00 00 20 00 00 为网络头00 00 成功与否标识00 40 或95 05标识码不清楚00 02 为读取内容如果要把10个数据写入到从DM10开始的10个数据区中则发送命令如下:80 00 02 00 56 00 00 13 00 00 01 02 82 00 0A 00 00 0A Data1-Data10具体说明如下:PLC返回为:80 00 02 00 00 14 00 00 01 02 00 00测试工具截图:PLC存储区已经写入:2.2 FINS/TCP的帧结构:和FINS/UDP相比,FINS/TCP多了一个握手过程,即双方建立了TCP的物理连接后,TCP客户端(PC)需向TCP服务器(PLC)发送一个连接请求帧,PLC接收到请求帧后,会为该请求分配一个FINS/TCP端口号,并返回响应帧给客户端,此时双方的FINS/TCP通信才真正建立。
OMRON FINS 通 讯1. OMRON FINS 通讯1.1 FINS 通讯概述FINS (factory in terface network service )通信协议是欧姆龙公司开发的用于工业自动化控制网络的指令/响应系统。
运用FINS 指令可实现各种网络间的无缝通信,通过编程发送FINS 指令,上位机或PLC 就能够读写另一个 PLC 数据区的内容,甚至控制其运行状 态,从而简化了用户程序。
FINS 协议支持工业以太网,这就为OMRON PLC 与上位机以太网通信的实现提供了途径。
命令码:01 01 读数据01 02 写数据结束码:00 00无错误,否则执行出错;举例说明:存储区代码(82代表D 区80代表CIO 区) 响应1.2 Fins 帧的结构发送命令结构:发送命令结构:命令码 (2个字节)响应命令结构:命令码(2个字节) 正文(根据不同的命令长度不正文(根据不同的命令长度不2 FINS在以太网上的帧格式Fins在以太网上帧格式比较简单,简单来说就是在上面所说的Fins帧的基础上加上以太网的包头就可以了。
具体帧格式分为UDP/IP帧格式和TCP/IP帧格式。
2.1 FINS UDP/IP 的帧格式ICF发送接收标志字节,发送报文:ICF=80HEX响应报文:ICF=CQRSV固定为OOHEX;GCT固定为02HEX;DNA目标网络号;本网络:00;远程网络:01-7F;DA1:目标节点号;对于以太网来说,即该网络IP地址最后一位的值;DA2: 目标单元号;对于CPU来说,固定为00;SNA源网络号;本网络:00;SA1:源节点号;IP地址最后一位的值;SA2源单元号:可设置为与目标单元号相同;SID:服务ID,响应端将接收过来的SID复制后添加到响应帧中;举例说明:PC IP 地址:10.11.1.19PLC IP 地址:10.11.1.86如果要请求DM10开始的10个字的内容目标IP地址:通讯主机地址(IP地址最后位)而PLC返回命令如下:80 00 02 00 00 56 00 00 13 00 00 Data—Data10 不同pic型号返回有区别,这里仅作参考实例:(读取CIO区452地址:01 C4;长度为1个字)发送码:80 00 02 00 20 00 00 BE 00 00 01 01 80 01 C4 00 00 01说明80 00 02 00消息头20为PLC地址00 00默认BE为计算机地址00 00 默认01 01命令码80读取区域01 C4 00读取地址00 01读取长度返回码:c0 00 02 00 be 00 00 20 00 00 01 01 00 00 00 02说明:c0 00 02 00 be 00 00 20 00 00 为网络头01 01其中第二个01位命令码00 00成功与否标识00 40或95 05标识码不清楚00 02为读取内容如果要把10个数据写入到从DM10开始的10个数据区中则发送命令如下:80 00 02 00 56 00 00 13 00 00 01 02 82 00 0A 00 00 0A Data1-Data1080 00 02 00 00 14 00 00 01 02 00 00测试工具截图:2.2 FINS/TCP的帧结构:和FINS/UDP相比,FINS/TCP多了一个握手过程,即双方建立了TCP的物理连接后,TCP 客户端(PC需向TCP服务器(PLC发送一个连接请求帧,PLC接收到请求帧后,会为该请求分配一个FINS/TCP端口号,并返回响应帧给客户端,此时双方的FINS/TCP通信才真正建立。
CP1W-CIF41欧姆龙以太网通信-FINS之五兆芳芳创作——陆一:连接设置节点号要正确要不CP1W-CIF41的ERROR灯闪(如·CP1W-CIF41 IP为192.168.250.1,节点号即为1,与最后一段相同).使用插槽1时4开关要置ON,使用插槽2时5开关要置ON,不然ERROR灯常亮.PLC的串行选件端口插以太网模块时设置要改成1152007,2,E HOST LINK若是不知道模块的IP,可以从PLC内存查抄:新建一个USB连接PLC的工程——在线任务——查抄存IP 地址的数据存放器例如放在选件板2的位置,则IP地址在D32300+155=D32455,D32456两个地址查抄;注意地址D 前面不要带M.(右键点击空白栏,编辑便可输入并查抄)连接办法1:知道模块IP后.设置电脑IP与模块处于同一个网段便可.FINS节点号即为模块IP的最后一个.TIPS:最好将无线网卡禁用连接办法2:登陆/c00.htm 注意:有时候模块要与电脑处于同一个网段才干连上(如模块192.168.250.1,电脑要为192.168.250.2)密码:ETHERNET修改完成以后点击传送,然后点击重启便可.二:FINS指令:学习利用网络调试助手发送FINS命令对PLC进行操纵,首先要学习FINS的通讯格局;1、FINS指令格局手册中的格局如下:举例说明:利用FINS/TCP的方法读取PLC的DM1通道的数据,格局解析如下:FINS帧格局:前面的ICF、RSV等为指定一些目标地址和源地址的网络号、节点号、单元号及其他固定的格局,前面关于Command code以及TEXT的内容,需要按照上位机实现什么的操纵,填写不合的操纵数据,就读取DM1通道的数据;DM区的Memory area code为82;读取存储区的Command code为0101;下面利用网络调试助手进行测试:2、使用网络调试助手测试FINS/TCP利用上位发送FINS/TCP的格局如下:ETN21手册,编号W421,P203.1)FINS节点地址数据发送(客户端->办事器)命令发送:4649 4E53 0000 000C 0000 0000 0000 0000 0000 00C7(本机IP地址末位为199).反应:46 49 4E 53 00 00 00 10 00 00 00 01 00 00 00 00 00 0000 C7 00 00 00 01 ;发送及前往截图如下:2)切换到编程状态发送:46494E53 00000014 00000002 000000008000 0200 0100 00C7 00FF 0402FINS 长度命令错误码 FINS帧反应:46494E53 00000016 00000002 00000000 C00002 00C700 000100 FF 0402 00003)切换到监督状态发送:46494E53 00000014 00000002 00000000 800002000100 00C700FF 0401反应:46494E53 00000016 00000002 00000000 C00002 00C700 000100 FF 0401 00004)读DM0开始的2个通道:发送:46494E53 0000001A 00000002 00000000 800002000100 00C7前往:46494E53 0000001A 0000000200000000C0000200C700 000100 FF 0101 0000 C00045415)将0.0置ON:发送:46494E53 0000001B 00000002 00000000 800002000100 00C700FF 0102 30000000 0001 01(注:写位时,要将某位置ON,必须将写入内容的最末1位为1,其它位不限.)前往:46494E53 00000016 00000002 00000000 C0000200C700 000100 FF 0102 0000同时不雅察NJ501,对应的变量(CIO_00)变成ON.6)读100.0:发送:46494E53 0000001A 00000002 00000000 80000200010000C700FF 0101 30006400 0001前往:46494E53 00000017 00000002 00000000 C0000200C700 000100 FF 0101 000001同时不雅察NJ501,对应的变量(CIO_10000)确实是ON.3、使用网络调试助手测试FINS/UDP通讯经测试,采取FINS/UDP方法时,直接发送FINS命令帧就可以进行通讯.。
创作编号:GB8878185555334563BT9125XW创作者:凤呜大王*Fins命令+Hostlink协议通讯实验一、实验配置硬件:CPU单元:CJ2M-CPU35RS232串口选件板:CP1W-CIF01USB转232连接电缆:CS1W-CIF31软件:CX-Programmer、串口调试助手UartAssist二、PC主机直连PLC串口命令帧格式介绍命令格式响应格式PC主机直连PLC的情况下,主机发送命令给PLC,发送命令格式如下:(P54)@:Hostlink协议起始代码Unit No.:单元号,对应PLC内置串口或串行通讯单元设置的Hostlink单元号。
Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~F,单位为10ms,例如设置为2,则响应等待时间为20msICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
SID:通常设置为00Fins command code:参考Fins通讯手册P125读命令:0101写命令:0102Text:具体操作内容,读写区域、读取起始地址、数据长度等内容存储区代码:(参考Fins通讯手册P137)DM(word):82W(bit):31W(word):B1CIO区(bit):30Tips:使用Fins指令最大可读取538个字节。
一条命令不能超过1114个字符。
三、串口通讯调试实例实例1——DM数据寄存器区读写实例;1、读取D0开始1个通道的值发送命令:@00FA 000000000 0101 82 000000 0001 7C *↙(回车键)返回命令码:@00FA004000000001010000123447*↙(回车键)2、读取D100开始的50个通道发送命令:@00FA00000000001018200640000327E*↙(回车键)3、写D200开始的2个通道发送命令:@00 FA 0 00000000 0102 82 00C8 00 0002 12345678 0F*↙(回车键) Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~FICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
Fins命令+Hostlink协议通讯实验一、实验配置硬件:CPU单元:CJ2M-CPU35RS232串口选件板:CP1W-CIF01USB转232连接电缆:CS1W-CIF31软件:CX-Programmer、串口调试助手UartAssist二、PC主机直连PLC串口命令帧格式介绍命令格式响应格式PC主机直连PLC的情况下,主机发送命令给PLC,发送命令格式如下:(P54)@:Hostlink协议起始代码Unit No.:单元号,对应PLC内置串口或串行通讯单元设置的Hostlink单元号。
Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~F,单位为10ms,例如设置为2,则响应等待时间为20msICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
SID:通常设置为00Fins command code:参考Fins通讯手册P125读命令:0101写命令:0102Text:具体操作内容,读写区域、读取起始地址、数据长度等内容存储区代码:(参考Fins通讯手册P137)DM(word):82W(bit):31W(word):B1CIO区(bit):30Tips:使用Fins指令最大可读取538个字节。
一条命令不能超过1114个字符。
三、串口通讯调试实例实例1——DM数据寄存器区读写实例;1、读取D0开始1个通道的值发送命令:@00FA 000000000 0101 82 000000 0001 7C *↙(回车键)返回命令码:@00FA004000000001010000123447*↙(回车键)2、读取D100开始的50个通道发送命令:@00FA00000000001018200640000327E*↙(回车键)3、写D200开始的2个通道发送命令:@00 FA 0 00000000 0102 82 00C8 00 0002 12345678 0F*↙(回车键) Header code:在PC主机直连PLC的情况下,头代码为FAResponse wait time:设置范围为0~FICF、DA2、SA2:在PC主机直连PLC的情况下,固定为00。
FINS指令实验报告
实验时间:2012-12
实验设备:CP1H-X40DT-D*1、串口调试工具
实验目的:了解FINS指令。
实验步骤:
1、硬件连接及设置
用USB口连接CX-Programmer,串联2实现通讯,5号拨码拨到OFF
2、CX-Programmer设置
①将串口模式更改为,(如下图所示)
②下载到PLC之后,离线(让出串口)
③串口调试工具打开串口,设置,(如下图所示)
3、指令发送
FINS-MODE
发送指令,(如下图所示)
响应指令,(如下图所示)
①切换PLC状态RUN/STOP(监视/编程),(如下图所示)
切换为RUN
@01FA0000000000401
Response Wait Time:设置范围0-F,一次的响应时间是10ms,如果设置为F,响应时间就是15*10=150ms
SID:通常设定为00,(如下图所示)
切换为STOP,(如下图所示)
②读DM100,1字的数据,(如下图所示)
I/O Memory code参考以下表格,(如下图所示)
82表示以字节的形式读取
006400是读取DM100CH的数据,64后面的00是表示位,(如下图所示)
③把CIO50.15置1,(如下图所示)
实验现象:
正常读取D100通道数据,设定CIO50.15置1
实验总结:
1、通过串口发送FINS时候格式开始固定为@00FA000000000
2、Hostlink是OMRON的PLC唯一公开的协议
3、串口发FINS指令时建议两条指令隔开500-1000ms。
欧姆龙fins协议欧姆龙FINS协议:现代工业自动化领域的通信利器欧姆龙FINS协议,全称为"Factory Interface Network Service",是由日本欧姆龙(Omron)公司开发的一套高效的工业自动化通信协议。
它作为欧姆龙工业设备之间的通信接口,被广泛应用于全球范围内的工业自动化领域。
本文将简要介绍FINS协议的背景、原理和应用。
一、背景工业自动化是以机械、电子和计算机技术为基础,通过自动控制和信息技术手段,实现对工业过程的监视、操控和优化的一门综合技术。
在现代工业生产中,自动化技术的应用已经变得越来越广泛,而通信技术在实现工业自动化中的集成、监控和控制起着重要的作用。
二、FINS协议的原理FINS协议是一种基于TCP/IP网络通信的实时通信协议,能够实现欧姆龙工业设备之间的数据交换和控制指令传输。
它采用了客户端/服务器模型,客户端发送请求,服务器返回响应,通过建立连接、传输数据包来实现设备之间的通信。
FINS协议的核心是消息和指令的传输。
消息格式包括消息头、命令和数据区。
消息头定义了消息的类型、长度和地址等信息。
命令部分包含了具体的指令内容,如读取数据、写入数据或执行其他操作。
数据区则是存储实际的数据信息。
FINS协议支持多种不同的命令类型,包括读写数据、控制指令和系统指令等。
通过这些命令,用户可以实现对欧姆龙设备的配置、监控和控制。
三、FINS协议的应用FINS协议已成为工业自动化领域中最重要的通信协议之一。
它在以下几个方面发挥着重要作用:1. 生产线实时监控与控制:在生产线上,不同设备之间需要快速地进行数据交换和指令传输。
FINS协议提供了高效、可靠的通信机制,使得各个设备能够实时地进行数据采集、监控和控制。
2. 数据采集与分析:在工业自动化中,大量的数据需要被采集、记录和分析。
FINS协议可以方便地实现数据的读取和写入,使得工程师可以对生产过程中的各种参数进行实时监测和分析。
ETN21以太网fins/TCP命令
实验时间:2014年10月8日
实验设备:CP1H-XA40DR-A、CP1W-EXT01、CJ1W-ETN21、网线
实验目的:利用SOCKETTOOL发送fins/TCP命令,对CPU内存进行读取和写入。
实验步骤:
1、 IP地址设置:
①打开电脑本地连接查看IP地址如下:
②usb线连上电脑,打开I/O表,将ETN21模块的ip地址与电脑设置为同一
个网段不同节点,节点号跟硬件上的node number一样,下载重启模块,如
下:
2、 配置socketool软件
①软件选TCP Client,创建,输入ETN21的IP地址和端口号,端口号9600,如下:
点击连接,显示十六进制值打勾:
3、 握手信号
TCP方式客户端需要发给服务器握手信号,等待服务器正常反馈表示握手成
功,才能正常交流数据。客户端发出的命令格式如下:
服务器反馈的命令格式如下:
故sockettool发送命令为:
46494E53(FINS)0000000C(长度12字节)00000000(命令
代码)00000000(错误代码)000000D6(客户端节点号214),即:
46494E530000000C0000000000000000000000D6
46494E530000000C00000000000000000000003C
反馈是46494E53(FINS)00000010(长度16字节)00000001(命令代码)00000000(错误
代码)000000D6(客户端节点号)00000003(服务器节点号)
通讯建立成功。
4、TCP命令
①命令帧如下,ETN手册W421第7-4有相关介绍,如下:
Fins 命令格式:
实验现象:
1、勾选16进制,输入读取D1命令:发送Fins/TCP命46494E53(FINS)0000001A(数据长
度26)00000002(命令代码)00000000(错误代码)80000200030000D600000101820001000001
(FINS命令帧),即:
46494E530000001A000000020000000080000200030000D600000101820001000001
46494E530000001A0000000200000000800002000100003C00000101820001000001
写入命令,CIO区100.01和100.02置位:发送Fins/TCP命令46494E53(FINS)0000001C(数
据长度28)00000002(命令代码)00000000(错误代码)
80000200030000D6000001023000640100020101(FINS命令帧)
即:46494E530000001C000000020000000080000200030000D6000001023000640100020101
查看内存:
并可看到输出灯100.01和100.02亮。
上述FINS DATE:
80 00 02 00 03 00 00 D6 00 00
ICF RSV GCT DNA DA1 DA2 SNA SA1 SA2 SID
0101/0102 82/30 000000/006401 0001/0002 0101
读/写 D区字/CIO位 D0/CIO100.01 1个/2位 数据
Response
C0 00 02 00 D6 00 00 03 00 00
ICF RSV GCT DNA DA1 DA2 SNA SA1 SA2 SID
0101 0000 /1111
读内存 表示正常完成 /反馈D1为1111
实验总结:
1、 Socket Tool 中一定要将下面以显示十六进制值打钩,否则无法正确读到数
据。
2、对为操作由于命令发送是按字节发送,故对单个字置1或0时要用01或者
00。
3、注意ETN模块面板node number要和IP地址最后一位一样。
4、如果通讯建立之后又发送了一次握手信号,将会反馈错误代码00000003(该
命令不支持)并且通讯将会中断;发送错误会反馈错误信息,一样会中断。
5、错误代码有如下: