控制系统的综合与校正-UESTC
- 格式:doc
- 大小:877.50 KB
- 文档页数:18


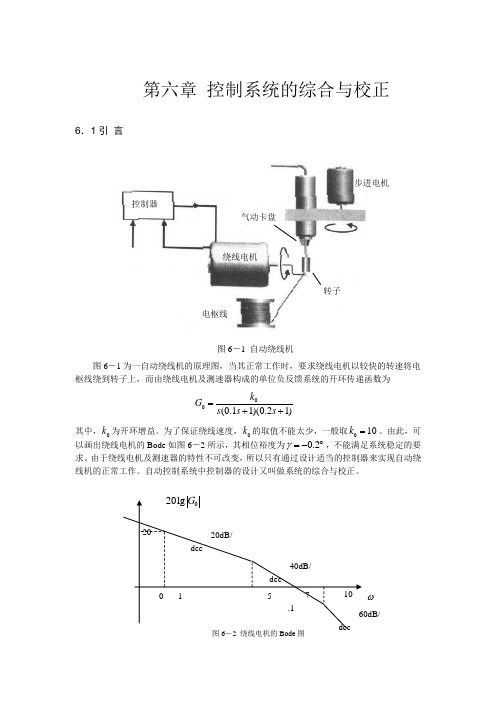
第六章 控制系统的综合与校正6.1引 言图6-1为一自动绕线机的原理图,当其正常工作时,要求绕线电机以较快的转速将电枢线绕到转子上,而由绕线电机及测速器构成的单位负反馈系统的开环传递函数为0(0.11)(0.21)k G s s s =++其中,0k 为开环增益。
为了保证绕线速度,0k 的取值不能太少,一般取010k =。
由此,可以画出绕线电机的Bode 如图6-2所示,其相位裕度为0.2γ=-︒,不能满足系统稳定的要求。
由于绕线电机及测速器的特性不可改变,所以只有通过设计适当的控制器来实现自动绕线机的正常工作。
自动控制系统中控制器的设计又叫做系统的综合与校正。
控制器绕线电机步进电机气动卡盘转子电枢线图6-1 自动绕线机ω本章主要介绍控制系统的综合与校正。
所谓综合或校正,就是在系统中不可变部分的基础上,加入一些元件(称校正元件),使系统满足要求的各项性能指标。
一般情况下,控制系统的固有部分即不可变部分由已知的元件组成,因而其特性也是已知的。
固有部分的参数除了增益以外,其余大多数参数是不可改变的,因而也叫不可变部分。
通常,提高系统的性能指标,仅仅靠提高增益是不能完成的。
所以,提高系统的性能指标往往需要引入新的元件来校正系统的特性。
控制系统中通常有两种校正方式,即串联校正和反馈校正。
校正元件可以串联在前向通道之中,形成串联校正,如图6-3所示。
也可接在系统的局部反馈通道之中,形成并联校正或反馈校正,如图6-4所示。
图6-3 串联校正系统方框图图6-4 反馈校正系统方框图串联校正的方法中,根据校正环节的相位变化情况,可分为超前校正、滞后校正、滞后超前校正。
按照运算规律,串联校正又可分为比例控制、积分控制、微分控制等基本控制规律以及这些基本控制规律的组合。
经典控制理论中系统校正的方法主要有根轨迹法和频率特性法。
本章主要介绍频率特性法。
频率特性设计法根据系统性能指标的要求,以系统的开环对数频率特性(Bode图)为设计对象,使系统的开环对数幅频特性图满足系统性能指标的要求。
第六章控制系统的综合与校正一、教学目的及基本要求1、理解频率响应的概念及含义2、掌握典型环节的Nyquist图和Bode图的绘制3、掌握开环系统Nyquist图和Bode图的绘制4、掌握由Bode图求系统开环传函的方法5、理解Nyquist稳定判据并掌握用其判别系统的稳定性6、理解相角裕度和幅值裕度的含义并掌握其计算二、重点与难点1、典型环节的Nyquist图和Bode图的绘制2、开环系统Nyquist图和Bode图的绘制3、由Bode图求系统开环传函的计算4、应用Nyquist稳定判据判别系统的稳定性5、相角裕度和幅值裕度的计算三、授课内容与课时第六章控制系统的综合与校正(1)引言(共6课时)(2)输入信号与控制系统带宽(3)基本控制规律分析(4)超前校正参数的确定(5)迟后校正参数的确定(6)迟后—超前校正参数的确定(7)反馈校正及其参数确定四、教学方法与手段采用多媒体教学及其它方法五、教学过程6.1 引言6.1.1控制系统设计的步骤自动控制系统的设计是指为了完成给定的任务,寻找一个符合要求的实际工程系统。
一般应经过以下三步:①根据任务要求,选定控制对象;②根据性能指标要求,确定系统的控制规律,并设计出满足这个控制规律的控制器,初步选定构成控制器的元器件;③将选定的控制对象和控制器组成控制系统,如果构成的系统不能满足或不能全部满足设计要求的性能指标,还必须增加合适的元件,按一定的方式连接到原系统中,使重新组合起来的系统全面满足设计要求。
这些能使系统的控制性能满足设计要求所增添的元件称为校正元件(或校正装置)。
把由控制器和控制对象组成的系统叫做原系统(或系统的不可变部分),把加入了校正装置的系统叫做校正系统。
为了使原系统的性能指标得到改善,按照一定的方式接入校正装置和选择校正元件参数的过程就是控制系统设计中的校正与综合的问题。
6.1.2性能指标在控制工程实践中,综合与校正的方法应根据特定的性能指标来确定。
第六章 控制系统的综合与校正6.1引 言图6-1为一自动绕线机的原理图,当其正常工作时,要求绕线电机以较快的转速将电枢线绕到转子上,而由绕线电机及测速器构成的单位负反馈系统的开环传递函数为0(0.11)(0.21)k G s s s =++其中,0k 为开环增益。
为了保证绕线速度,0k 的取值不能太少,一般取010k =。
由此,可以画出绕线电机的Bode 如图6-2所示,其相位裕度为0.2γ=-︒,不能满足系统稳定的要求。
由于绕线电机及测速器的特性不可改变,所以只有通过设计适当的控制器来实现自动绕线机的正常工作。
自动控制系统中控制器的设计又叫做系统的综合与校正。
控制器绕线电机步进电机气动卡盘转子电枢线图6-1 自动绕线机020lg Gω105120-20dB/dec-40dB/dec-60dB/dec7.1本章主要介绍控制系统的综合与校正。
所谓综合或校正,就是在系统中不可变部分的基础上,加入一些元件(称校正元件),使系统满足要求的各项性能指标。
一般情况下,控制系统的固有部分即不可变部分由已知的元件组成,因而其特性也是已知的。
固有部分的参数除了增益以外,其余大多数参数是不可改变的,因而也叫不可变部分。
通常,提高系统的性能指标,仅仅靠提高增益是不能完成的。
所以,提高系统的性能指标往往需要引入新的元件来校正系统的特性。
控制系统中通常有两种校正方式,即串联校正和反馈校正。
校正元件可以串联在前向通道之中,形成串联校正,如图6-3所示。
也可接在系统的局部反馈通道之中,形成并联校正或反馈校正,如图6-4所示。
图6-3 串联校正系统方框图图6-4 反馈校正系统方框图串联校正的方法中,根据校正环节的相位变化情况,可分为超前校正、滞后校正、滞后超前校正。
按照运算规律,串联校正又可分为比例控制、积分控制、微分控制等基本控制规律以及这些基本控制规律的组合。
经典控制理论中系统校正的方法主要有根轨迹法和频率特性法。
本章主要介绍频率特性法。
频率特性设计法根据系统性能指标的要求,以系统的开环对数频率特性(Bode图)为设计对象,使系统的开环对数幅频特性图满足系统性能指标的要求。
具体来说就是:1,系统的低频段具有足够大的放大系数,有时候也要求具有足够大的斜率以满足系统对稳态误差的要求。
2,系统的中频段以-20dB/dec的斜率通过0dB线,并且保证足够的中频段宽度以满足性能指标对相位裕度的要求。
3,高频段一般不作特殊设计,而是根据被控对象自身特性进行高频衰减。
6.2 基本控制规律站在系统设计的角度,控制系统的校正又可以看成是控制系统的控制器设计。
控制系统的控制器通常采用比例、微分、积分等基本控制规律,以及这些基本控制规律的组合,如比例微分、比例微分、比例积分微分,来实现对被控对象的控制。
6.2.1 比例(P )控制规律具有比例控制规律的控制器称为P 控制器。
它实际上是一个增益可调的放大器,如图6-5所示。
P 控制器的输出信号)(t m 与输入信号)(t ε成比例关系,即)()(t K t m P ε=(6-1)其中,P K 为P 控制器的比例系数,又称为P 控制器的增益。
在串联校正中,提高P 控制器的增益就是提高控制系统的开环放大系数,可以减小系统的稳态误差,提高控制精度。
但是会降低系统的相对稳定性,开环放大系数过大还会造成系统的不稳定。
因此在控制系统的设计中,很少单独使用比例控制规律。
6.2.2 比例微分(PD )控制规律具有比例加微分控制规律的控制器称为PD 控制器,如图6-6所示。
PD 控制器的输出信号)(t m 即与输入信号)(t ε的成比例关系,又与输入信号)(t ε的导数成比例关系,即dtt d K t K t m P P )()()(ετε+= (6-2)其中,P K 为可调比例系数,τ为可调微分时间常数。
PD 控制器由于采用了微分控制规律,可以反应输入信号的变化趋势,引入早期修正信号,从而增加系统的阻尼程度,提高系统的稳定性。
但是,微分控制规律只有在输入信号变化时才有效,所以单一的D 控制器不能单独使用。
另外由于微分控制规律具有预见信号变化趋势的特点,所以容易放大变化剧烈的噪声。
6.2.3 积分(I )控制规律具有积分控制规律的控制器称为I 控制器,如图6-7所示。
I 控制器的输出信号)(t m 与输入信号)(t ε的积分成比例关系,即图6-5 比例(P )控制器图6-6 比例微分(PD )控制器⎰=II dt t K t m 0)()(ε(6-3)其中,I K 为可调的比例系数。
由于I 控制器的积分作用,当输入信号变化零以后,其输出信号可能仍保持为一个非零的常量。
I 控制器可以提高系统的型别,从而消除或减小稳态误差,提高系统的稳态性能指标。
但是I 控制器引入了-90°的相移,会降低系统的稳定性,甚至可能造成系统的不稳定。
6.2.4 比例积分(PI )控制规律具有比例积分控制规律的控制器称为PI 控制器,如图6-8所示。
PI 控制器的输出信号)(t m 即与输入信号)(t ε成比例关系,也与输入信号)(t ε的积分成比例关系,即⎰+=IIPP dt t T Kt K t m 0)()()(εε(6-4)其中,P K 为可调放大系数,I T 为可调积分时间常数。
PI 控制器引入的位于原点的极点可以提高系统型别,从而消除或减小稳态误差,提高系统的稳态性能指标。
同时,只要保证积分时间常数I T 足够大,可以减弱I 环节对系统稳定性的不利影响。
PI 主要用来提高控制系统的稳态性能。
例 6-1 如图6-9所示,某单位负反馈系统的不可变部分传递函数为)1()(00+=Ts s K s G试分析PI 控制器对系统稳态性能的改善作用。
图6-8 比例积分(PI )控制器图6-7 积分(I )控制器图6-9 PI 控制系统解 由图可知,系统的开环传递函数为)1()1()(20++=Ts s T Ts K K s G I P 可见,系统型别由原来的I 型提高为II 型。
由第二章学习的内容很容易计算出,对于斜坡输入t R t r 1)(=,在无PI 控制器作用时,系统的稳态误差为01/K R ;接入PI 控制器以后,系统的稳态误差为零。
由此可见,PI 控制器可以改善控制系统的稳态性能。
引入PI 控制器后,系统的特征方程为000=+++K K s T K K s T Ts T P I P I I其中,参数T ,I T ,P K ,0K 都是正数,满足系统稳定的必要条件。
并且只要合理的选择上述各参数,就可以保证系统的稳定性。
通过上面的分析可知,采用PI 控制器可以提高型别,消除或消除稳态误差,同时又可以保证系统的稳定性。
6.2.5 比例积分微分(PID )控制规律具有比例积分微分控制规律的控制器称为PID 控制器,如图6-10所示。
PID 控制器具有比例、积分和微分三种控制规律各自特点,其输出信号)(t m 与输入信号)(t ε关系为,dtt d K dt t T K t K t m P tIPP )()()()(0ετεε++=⎰(6-5)由(6-5)式可知,PID 控制器的传递函数为)11()()(s sT K s s M I P τε++= (6-6)PID 控制器的传递函数还可以写成ss T s T T K s s M I I I P 1)()(2++•=τε (6-7)若1/4<I T τ,式(6-7)还可以改写成ss s T K s s M I P )1)(1()()(21++•=ττε (6-8)其中图6-10 比例积分微分(PID )控制器⎪⎪⎭⎫ ⎝⎛-+=I I T T ττ411211 ⎪⎪⎭⎫ ⎝⎛--=I I T T ττ411212 由(6-8)式可知,PID 控制器可使系统的型别提高一级,并且还引入两个负实零点。
与PI 控制器相比,不但保留了改善系统稳态性能的特点,还多提供一个负实零点,在提高系统动态性能上更加优越。
因而,PID 控制器在控制系统中得到了广泛的应用。
6.3 串联超前校正本节首先介绍串联超前校正的特点,然后介绍采用频率响应法确定超前校正参数的方法。
6.3.1 超前校正网络超前校正就是利用超前校正环节引入正的相移,增加系统的相位裕度,从而提高系统的动态性能。
常用的超前校正环节有PD 控制器和带惯性的PD 控制器。
PD 控制器的传递函数为)1(s K G P c τ+=(6-9)其中,P K 为比例系数,τ为微分时间常数。
当1=P K 时,PD 控制器的频率相应特性如图6-11所示。
可见,当ω由0变到∞+时,幅频特性由0dB 变到∞+,而相频特性由0°变到90°。
显然,PD 控制器是超前校正元件。
从相频特性可以看出,采用PD 控制器可以为控制系统引入最大至90°的超前相移,然而从幅频特性可以看出,采用PD 控制器会增加控制系统的幅频特性高频段斜率,不利于抑制噪声。
因而,在超前校正中,带惯性的PD 控制器比PD 控制器更常用。
带惯性的PD 控制器的传递函数为)(11T TssG c >++=ττ(6-10)若令)1(>=a aTτ,则带惯性的PD 控制器的频率响应为)1(11)(>++=a jT jaT j G c ωωω(6-11)其相频特性为dec /图6-11 PD 控制器的频率响应221111)()(ωωωωωωφωaT T aT tg T tg aT tg j G c +-=-==∠---(6-12)带惯性的PD 控制器的频率响应如图6-12所示,结合(6-12)式可以看出,当ω由0增加到∞+时,m φ会在m ω处出现极值,由0/)(=ωωφd d 可以求得Ta m 1=ω (6-13)11sin 21)(11+-=-=∠=--a a aa tg j G c m ωφ (6-14)由(6-14)式可以看出,m φ的值随着a 值的增大而增大,图6-13为在不同a 值的情况下,带惯性的PD 控制器的相频特性。
由(6-14)式可以计算出不同的a 值所对应的m φ的值,如表6-1所示,图6-14则以曲线的方式表示出了a 与m φ之间的关系。
从表6-1和图6-14可以看出,当a 的取值介于5~20之间的时候,m φ的取值介于41. 8°~64.8°之间。
而当a 较小时,m φ值过小;a 较大时,m φ随a 增大的变化较小。
故通常在超前校正中取a 值在5~20的范围内。
表6-1 m φ-a 关系表图6-12 带惯性的PD 控制器的频率响应m 1020图6-13 带惯性的PD 控制器的相频特性0.11.010将(6-13)式的结果代入带惯性的PD 控制器的幅频特性)(lg 20ωj G c ,得到a j G m c lg 10)(lg 20=ω(dB )(6-15)带惯性的PD 控制器所能提供的最大超前相移ο90<m φ,与PD 控制器相比较小,但由于引入了一个惯性,带惯性的PD 控制器不会提高控制系统幅频特性高频段的斜率,在抑制系统高频噪声的能力上优于PD 控制器。