第五章 串级控制系统
- 格式:ppt
- 大小:2.83 MB
- 文档页数:133

简述串级控制系统的特点
串级控制系统是由多个级联连接的控制回路组成的控制系统。
其特点包括:
1. 多级控制:串级控制系统包含多个级联的控制回路,每个回路负责不同的控制任务。
不同的回路负责不同的控制目标,通过相互协调和影响来实现整体的控制效果。
2. 分层结构:串级控制系统的各个级联回路之间具有明确的层级结构,上层回路控制下层回路。
上层回路通常负责整体的控制策略和目标设定,下层回路负责具体的执行和动作控制。
3. 协调和互补:不同级联回路在控制过程中相互协调,上层回路的控制信号会影响下层回路的控制行为,以保持整个系统的稳定性和性能。
4. 灵活性和可扩展性:串级控制系统可以根据需要添加或删除不同的级联回路,使得系统的控制策略和目标可以根据需求灵活调整和扩展,提高系统的适应性。
5. 鲁棒性和容错性:由于多个回路相互协调和互补,串级控制系统具有较强的鲁棒性和容错性。
当某个回路出现故障或失效时,其他回路可以通过重新配置和调整来维持系统的整体性能。

第三章串级控制系统简单控制系统由于结构简单,而得到广泛的应用,其数量占有所有控制系统总数的80% 以上,在绝大多数场合下已能满足生产要求。
但随着科技的发展,新工艺、新设备的出现,生产过程的大型化和复杂化,必然导致对操作条件的要求更加严格,变量之间的关系更加复杂。
同时,现代化生产往往对产品的质量提出更高的要求,例如甲醇精馏塔的温度偏离不允许超过1℃石油裂解气的生冷分离中,乙烯纯度要求达到99.99%等,此外,生产过程中的某些特殊要求,如物料配比、前后生产工序协调问题、为了安全而采取的软保护的问题、管理与控制一体化问题等,这些问题的解决都是简单控制系统所不能胜任的,因此,相应地就出现了复杂控制系统。
在简单反馈回路中增加了计算环节、控制环节或其他环节的控制系统统称为复杂控系统。
复杂控制系统种类较多,按其所满足的控制要求可分为两大类:以提高系统控制质量为目的的复杂控制系统,主要有串级和前馈控制系统;满足某些特定要求的控制系统,主要有比值、均匀、分程、选择性等。
本章将重点介绍串级控制系统。
串级控制系统是所有复杂控制系统中应用最多的一种,它对改善控制产品有独到之处。
当过程的容量之后较大,负荷或扰动变化比较剧烈、比较频繁、或是工艺对生产质量提出的要求很高,采用单控制系统不能满足要求时,可考虑采用串级控制系统。
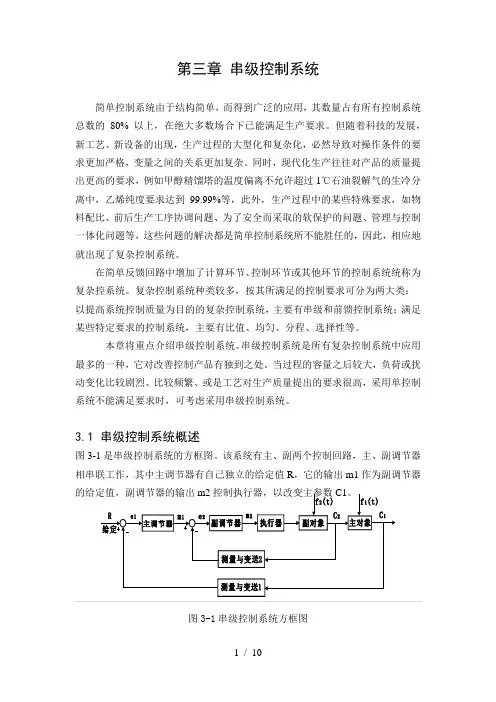
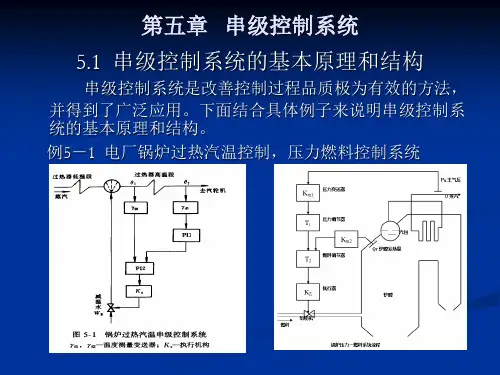
3.1 串级控制系统概述图3-1串级控制系统方框图3.2 串级控制系统的特点串级控制系统从总体来看,仍然是一个定制控制系统,因此主变量在扰动作用下的过渡过程和简单定制控制系统的过渡过程具有相同的品质指标和类似的形式。
但是串级控制系统和简单控制系统相比,在结构上增加了一个与之相连的副回路,因此具有一系列特点。
由于副回路的存在,改善了过程的动态特性提高了系统的工作频率。
串级控制系统在结构上区别于接单控制系统的主要标志是用一个闭合的副回路代替了原来的一部分被控对象。
所以,也可以把整个副回路看作是主回路的一个环节,或把副回路称为等效副对象。
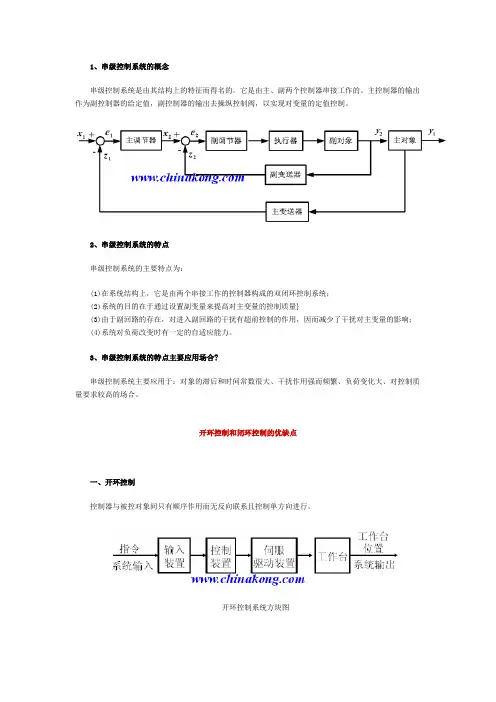
1、串级控制系统的概念
串级控制系统是由其结构上的特征而得名的。
它是由主、副两个控制器串接工作的。
主控制器的输出作为副控制器的给定值,副控制器的输出去操纵控制阀,以实现对变量的定值控制。
2、串级控制系统的特点
串级控制系统的主要特点为:
(1)在系统结构上,它是由两个串接工作的控制器构成的双闭环控制系统;
(2)系统的目的在于通过设置副变量来提高对主变量的控制质量}
(3)由于副回路的存在,对进入副回路的干扰有超前控制的作用,因而减少了干扰对主变量的影响;
(4)系统对负荷改变时有一定的自适应能力。
3、串级控制系统的特点主要应用场合?
串级控制系统主要应用于:对象的滞后和时间常数很大、干扰作用强而频繁、负荷变化大、对控制质量要求较高的场合。
开环控制和闭环控制的优缺点
一、开环控制
控制器与被控对象间只有顺序作用而无反向联系且控制单方向进行。
开环控制系统方块图
优点:简单、稳定、可靠。
若组成系统的元件特性和参数值比较稳定,且外界干扰较小,开环控制能够保持一定的精度。
缺点:精度通常较低、无自动纠偏能力。
二、闭环控制
闭环控制系统特点:输出端和输入端之间存在反馈回路,输出量对控制过程有直接影响。
闭环的作用:应用反馈,减少偏差。
优点:精度较高,对外部扰动和系统参数变化不敏感
缺点:存在稳定、振荡、超调等问题,系统性能分析和设计麻。
串级控制系统pid -回复什么是串级控制系统?串级控制系统是一种常用的自动控制系统,它有着广泛的应用。
它由一个或多个控制环构成,每个环负责系统的不同方面。
其中,PID控制器是串级控制系统中的重要组成部分。
PID控制器的基本结构由比例(P)、积分(I)和微分(D)三个部分组成。
这些部分根据需要采取不同的权重,通过对输入信号进行加权和调整来实现对系统输出的精确控制。
具体而言,PID控制器会根据误差信号对输出信号进行调整,从而使系统的响应更快、更准确。
在串级控制系统中,PID控制器通常用于对内环进行控制,以使内环更加稳定和精确。
内环输出的调节信号则作为外环的输入,进一步调节并优化整个系统的性能。
这种层次化的控制结构使得串级控制系统能够应对不同的系统需求,并提供更加强大的控制能力。
串级控制系统的设计与调整需要经过多个步骤,以确保系统能够实现更高的控制精度和稳定性。
下面,我们将逐步介绍串级控制系统PID的一般设计和调整过程。
第一步:系统建模和理论分析在设计串级控制系统之前,我们需要对被控对象进行建模和理论分析。
这包括对系统的动态特性和稳定性进行分析,以及参数的确定。
通过数学模型、实验数据和仿真等手段,我们可以了解系统的频率响应、阻尼比和时间响应等重要参数。
第二步:内环控制器设计和调整根据内环的稳定性和控制要求,我们可以设计和调整PID控制器。
常见的方法包括经验调参、Ziegler-Nichols方法和优化算法等。
通过调整比例、积分和微分参数,我们可以使系统的超调量、稳定时间和稳态误差等性能指标满足预期要求。
第三步:外环控制器设计和调整在内环控制器设计和调整完毕后,我们需要继续进行外环的设计和调整。
外环的目标是进一步改善系统的响应速度、稳定性和精度。
在这一步骤中,我们可以选择适当的控制策略和参数,例如,比例控制器、模糊控制器或者多变量控制器等。
第四步:系统仿真和优化在设计和调整内外环控制器后,我们可以使用仿真软件对整个串级控制系统进行仿真和优化。