斜面圆弧形井眼轨迹控制新模式
- 格式:doc
- 大小:177.00 KB
- 文档页数:6
2、井眼轨迹控制技术随着水平井在不同区块的施工,不同区块每口井的地质情况不同,井眼轨迹控制过程中遇到的问题也不一样。
突出表现在以下几个方面:(1)、实钻地质情况复杂多变,油层深度与设计变化较大,井眼轨迹需要随地质情况变化进行调整。
(2)、水平段油层深度在横向上变化不一,有从低部位到高部位的,也有从高部位到低部位的,还有先从低部位到高部位再下降的。
(3)、不同区块工具造斜能力和地层对井眼轨迹的影响不同。
(4)、测量数据的相对滞后对地质导向和井眼轨迹的预测和调整带来困难。
(5)、老平台钻井的防碰问题在水平井钻井中更为突出,水平井的直井段、造斜段及水平段都存在防碰问题。
为了有效地进行井眼轨迹的控制,掌握井眼轨迹状况和发展趋势,及时发现油顶、准确入靶和沿油层钻进,水平井施工中在造斜点以下所有井段全部应用了MWD+导向钻具进行井眼轨迹监测与控制,从探油顶段开始应用LWD进行地质导向,并与地质人员密切配合,保证实现地质目的。
水平井井眼轨迹控制原则:根据设计,结合地层情况,优化水平井井眼轨迹控制方案;以地质导向为先导,根据地层变化,及时调整,控制好水平井着陆段和水平段的井眼轨迹,实现地质目的。
水平井井眼轨迹控制技术措施:(1)、水平井井眼轨迹控制施工方案的优化。
针对不同的井身剖面和地层剖面类型,选择不同的井眼轨迹控制方案。
对于油层为上倾方向,控制井眼轨迹在A点前20~30m,垂深达到设计油顶位置,井斜达到85°~86°,进入油层后能及时在A点前调整到最大井斜,达到井眼轨迹控制在距油顶1.5m 范围内。
对于油层为下倾方向,水平段井斜角小于90°,控制井眼轨迹在A点前40~50m,垂深到设计油顶位置,井斜达到82°~84°,进入油层后能及时在A点前调整到最大井斜,达到井眼轨迹控制在距油顶1.5m范围内。
根据地质情况变化,及时调整井眼轨迹。
与地质人员一起,及时了解、分析地层变化,着陆段提前下如LWD仪器,提供伽玛、电阻率测量数据,根据油层深度的变化,及时修正井眼轨迹,保证在A点前着陆,避免牺牲水平段。

井眼轨迹设计与控制方法
1.地层条件:在设计井眼轨迹时需要考虑地层的性质、构造、压力等因素,以确定适合的钻井方法和工具。
2.钻井目标:包括井筒垂直深度、水平延伸距离、井眼倾斜角度等,根据具体的钻井目标确定井眼轨迹设计方案。
3.施工能力:包括钻机能力、钻具能力等,确保能够实施设计的井眼轨迹。
静态方法是指在井眼轨迹设计之前,先进行地质勘探和数据分析,结合已有的地层数据、水力地质条件等,通过计算机辅助工具进行模拟和优化设计,得到最优的井眼轨迹。
动态方法是指在钻井过程中,根据实时的地质、钻井工程和测井数据进行调整和优化井眼轨迹。
常用的方法有测井导向、地磁地力导航、地震导向、连续测定和微地震测定。
井眼轨迹的控制方法主要包括两个方面:一是井眼测定和测量,二是实时调整和控制。
井眼测定和测量是指通过各种测量工具,如测深、倾斜度、方位角、动力学参数等,对井眼轨迹进行测量和测定,从而获得井眼的实际情况。
实时调整和控制是指根据井眼测量和测定的结果,通过相应的调整控制方法,按照设计要求对井眼轨迹进行调整和控制。
常用的控制方法有钻头定向工具、定向套管、钻井液调整、堵漏、裸眼控制等。
总的来说,井眼轨迹设计与控制方法是一个复杂且关键的过程,需要综合考虑地层条件、钻井目标和施工能力等因素,并结合静态和动态的设
计方法,以及井眼测定和测量、实时调整和控制方法,确保钻井工程的安全和顺利进行。

260对井眼轨迹进行有效控制是一种特别繁琐的多扰动的控制过程,对井斜控制方案进行交互式的设计能对井眼轨迹的有效控制起到重要作用,但要使其与实钻轨迹进行完全吻合却并不可能实现。
所以,在进行井斜控制方案时应对井斜角与方位角进行经常性的调整,这也正是扭方位设计的目的。
在进行井眼轨迹控制时,由于众多因素的影响,因此在进行井斜控制方案的设计时,要对井眼轨迹的变化规律进行掌握,以此进行针对性的制定出井斜控制方案。
近年来,我国及其他国家通常是利用空间圆弧轨迹模型来实现对井眼轨迹设计及控制进行研究的。
这种模型能够对空间斜平面以内的圆弧做出假定,并从模型的形态上采用井眼曲率与初始工具面角对其进行表征。
本文通过采用交互式设计方法来完善井斜控制方案,通过任选待定参数,来对初始工具面角相关参数的多值性予以解决,并对稳斜扭、全力扭方位的适用性做出了浅要的阐明,以此实现优化井余控制方案的目的。
1 交互式设计方法在进行井斜控制方案设计时,可以根据井底点处的井斜角与方位角提供出来的已知数据,来对井眼曲率初始工具角、井段长度与想要钻入深度的井斜角及方位角做为未知数据,传统的井斜控制方案的设计规则是通过方位变化规律、井段长度及井眼曲率的变化规律等,来进行初始工具面角及想要钻入深度的井斜角进行计算。
这种设计方法和功能比较单一化,而且计算起来非常的麻烦。
譬如,依据钻井要求,对其进行继续钻进,当井斜角与方位角达到指定数值时,要对设计工具造斜率及初始工具面角进行设计,以此才能使其变得更加实用、可行。
通常在进行交互式设计时,如果在五个未知参数中,有三个是进行给定的,那就可以对另外两个未知参数进行计算。
也就是说,只要能够对两个待定参数进行任选,然后进行井斜控制方案的交互式设计,通过计算机软件,来实现对设计过程的优化,以及对计算结果的检验,从而确保交互式设计方法能够在现场中得到更加灵活的应用。
2 多值参数取值方法在空间圆弧轨迹模型基本关系式中,如果出现了分母是零,而根式内是负数的问题,对于其进行处理及解释相对来说较为容易,本文不再对其进行讲解。


定向井钻井空间圆弧轨道计算的问题探究【摘要】作为一种在现实应用中比较典型的井眼轨道模型,空间圆弧在多目标井、分支井和侧钻井等一些三维井眼的轨道设计中得到了广泛的推广和使用。
鉴于对这些三维井眼轨道的设计和计算,一般而言都应用在垂直剖面图与水平投影图之中上,因此这就相应的增加了问题的复杂性。
鉴于这种情况,当前通常使用的计算公式为近似公式。
本文通过对井眼轨道相关设计要求与空间圆弧具体特点的探索和研究,从而提出了坐标、井斜角以及方位角和井斜变化率等相关计算公式,这些公式普遍具有实用性强的优点,应该得到广泛的推广和使用。
【关键词】定向井井空间圆弧轨道计算问题探究所谓的定向井钻井,具体而言是指在对其进行钻井的过程中,不是竖直的设计井眼,而是要与井眼有着相应的距离。
进行钻井是要按照之前已经设计好的轨道采取钻井,最后则要依据设计的最终要求来达到相应的目的和层位。
对于定向井钻井而言,对其轨道的控制与设计是最重要的关键步骤。
要不断的优化定向井的轨道设计,为更快更好的引导钻井,保证其能够达到目的层提供有力的技术支持。
通过不断的研究和发展,定向井钻井轨道的相关优化设计方法得到了有效的支持和改进在此基础上,则形成了比较完整的定向井轨迹优化设计体系。
从而使得其在实际应用中的范围越来越广,在现场的应用越来广泛,受到广泛的欢迎。
对定向井的轨道进行优化设计的最重要的目的是为了找到一个最优的轨迹,从而能顺利的从井口达到目的层的钻井井眼。
如果现场的施工条件能够达到和允许,那么就要把井眼的井斜变化率和方位角变化率等各种参数达到最低,从而实现对定向井钻井空间圆弧轨道实现最优计算。
与此同时还要提供一个最短的井眼轨迹长度,来优化设计轨迹,从而尽可能的降低钻井的摩阻力与其对井口动力的有效消耗。
1 圆弧井段上任意点井斜角和方位角在采取斜平面法进行三维定向井钻井轨道设计时,其弯曲的井段是一段空间圆弧。
一些研究学者已经给定了井斜角与方位角要跟随着弯曲角不断变化的相关计算公式,在公式中的通常出现的系数表达式里,除了有端点井斜角与方位角的计算之外,还应用了装置角。
井眼轨迹设计与控制方法井眼轨迹设计与控制方法是指在石油工程领域中,为了实现最佳的钻井效果,需要设计合适的井眼轨迹,并通过控制方法来实施钻进操作。
井眼轨迹设计和控制方法的目的是确保井眼能够贯穿目标层,并达到钻井目标。
以下是井眼轨迹设计和控制方法的一般步骤和原则。
1.收集地质和地下信息:了解地质和地下条件对井眼轨迹设计的影响,包括地层构造、断层、岩性、陷落带等信息。
通过地质勘探技术,如地震勘探、测井等方法获得地下信息。
2.考虑钻进目标:确定钻井目标并制定井眼轨迹设计的目标,包括垂直井、平曲井、S型井、水平井等。
3.选择合适的钻头和井壁稳定措施:根据地层岩性和井眼设计目标,选择适当的钻头和井壁稳定措施,以减少钻井风险。
4.采用合适的井眼轨迹设计软件:使用井眼轨迹设计软件,根据地质和目标要求,进行井眼轨迹设计。
软件可以根据用户的输入参数,提供最佳的井眼轨迹设计方案。
5.优化井眼轨迹设计:根据设计的井眼轨迹,进行优化,以满足目标要求、降低钻井风险和成本。
6.完善设计:进行设计审查并完善井眼轨迹设计。
井眼轨迹控制方法的原则如下:1.根据地质情况进行实时调整:在钻井过程中,根据地质情况和实时测井数据,适时调整井眼轨迹设计。
控制方法可以包括调整钻头类型、调整钻井液密度等。
2.使用工具进行测量和记录:使用相关测量工具,如测井仪器、鱼雷测井等,对井眼轨迹进行实时测量和记录。
这些测量数据可用于分析地层情况和优化井眼轨迹设计。
3.采用适当的工具和技术:选择合适的工具和技术,如导航仪器和测量工具,帮助实施井眼轨迹控制。
这些工具可以提供准确的测量数据和实时导航。
4.数据分析和反馈:通过分析测量数据和井斜数据,对当前井眼轨迹进行评估和反馈。
根据评估结果,进行必要的调整和控制。
5.培训和提高技能:培训钻井工程师和工人,提高其井眼轨迹设计和控制的技能水平。
这样可以确保钻井操作的安全和高效。
总之,井眼轨迹设计和控制方法是确保钻井工程顺利进行的重要环节。
井眼轨迹控制技术 (1)三、海洋定向井直井防斜技术 (12)四、海洋定向井预斜技术 (14)上图为某平台表层预斜轨迹与内排井直井段轨迹对比图 (15)五、造斜段、稳斜段、降斜段轨迹控制 (15)井眼轨迹控制技术井眼轨迹控制指:按照设计要求(地质设计、钻井工程设计、定向井设计等),利用定向井工艺、技术,完成定向井、水平井、水平分枝井等轨迹控制的过程。
井眼轨迹控制技术按照定向井的工艺过程,可分为直井段、预斜段、造斜段、增斜段、稳斜段、降斜段和扭方位井段等控制技术。
目前海洋定向井轨迹控制使用的是导向钻具,而在陆地油田有的还是用常规钻具组合(增斜、降斜、稳斜、降斜)实现井眼轨迹的控制。
定向井井眼轨迹控制考虑的因素及工作内容包括:1.造斜点的选择(1).选择地层均一,可钻性好的地层(2).KOP在前一层套管鞋以下50米,套以免损坏套管鞋(3).初始造斜的准确性非常重要(4).大于25度的定向井方位易控制2.造斜率选择(1).大斜度大位移定向井:2~3度/30米(2).一般丛式井3 ~5度/30米(3).造斜率要均匀3.降斜率(1).对于“S”井眼,通常降斜率1~2度/30米(2).如降斜后仍然要钻长的井段,降斜率还要小,以免键槽卡钻4.预测井眼轨迹要考虑的方面(1).底部钻具组合的受力分析(2).地层的因素:岩性、均匀性、走向、倾向、倾角(3).钻头结构、形状(4).侧向切削模型和轴向切削模型,确定侧向力5.钻具组合影响轨迹:底部钻具组合表现不同的效果,是由于不同的钻具有各自的力学特性,产生钻头侧向力的方向和大小不同。
(1).1#STB和2#STB的距离(2).(刚度)钻铤内外径、材料(3).扶正器尺寸(4).钻头类型和冠部形状6.井眼方向控制内容:(1).井斜角的控制:增斜、降斜、稳斜;(2).井斜方位角控制:增方位、降方位、稳方位;7.定向井轨迹控制的主要做法1)第一阶段:打好垂直井段(1).垂直井段打不好,将给造斜带来很大的困难。
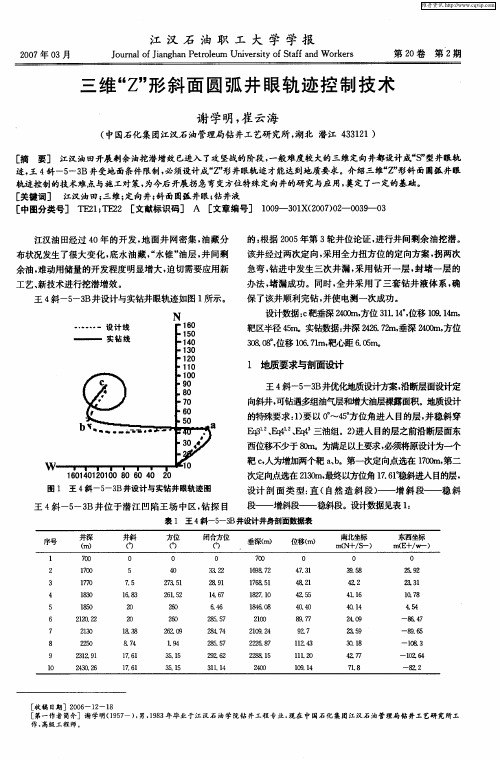
斜面圆弧形井眼的轨迹控制新模式韩志勇石油大学(华东) 石油工程学院摘要:斜面圆弧曲线是三维定向井轨道设计的最优曲线,在相同设计条件下,设计曲率最小,设计长度最短。
但目前的轨迹控制方法不可能钻出斜面圆弧形的曲线。
本文在研究了斜面圆弧曲线与其所在的斜平面之间关系的基础上,提出采用轨迹控制的“斜平面角”模式,可以钻出斜面圆弧形井眼轨道。
论文向MWD厂商建议,司钻显示屏应该有两种显示模式,一种是目前常用“装置角”模式,可以钻出恒装置角曲线的井眼;另一种是本文提出的“斜平面角”模式,可以钻出斜面圆弧形井眼。
两种模式应该能很容易转换。
关键词:定向井;三维定向井;轨道设计;轨迹控制;MWD;恒装置角曲线作者在文献[1]中指出,三维定向井目前存在着实钻井眼曲线与设计井眼曲线不统一的问题。
设计轨道曲线仅仅作为参考,施工者并不按照设计轨道去钻进。
例如,设计轨道为“斜面圆弧曲线”,而实钻的井眼轨迹却是“恒装置角曲线”。
解决这个实钻与设计不统一问题的方法有二,一是开发采用恒装置角曲线来设计三维定向井轨道,文献[1]对此已有论述;二是寻找能够钻出“斜面圆弧曲线”的轨迹控制新模式,这就是本文的目的和任务。
一.斜面圆弧形井眼轨道的优点作为三维定向井轨道设计曲线,斜面圆弧曲线是人们最喜欢采用的曲线,因为它具有很多优点。
首先,它是所有曲线中最简单的曲线,数学表达式最简单,给定一个圆心和一个半径,用一只圆规就可以完成画图。
其次,与定向井轨道设计的其他曲线相比较,在相同的井段长度下,斜面圆弧曲线的曲率最小;在最大曲率限制的条件下,斜面圆弧曲线的井眼长度最短。
文献[1]以“三维单目标待钻井眼”轨道设计为例,对比了四种可用于三维定向井轨道设计的曲线。
设计条件是:已知目前井底0点的井深1000m,井斜角20o,井斜方位角20o,垂深950m,N坐标150m,E坐标80m;给定目标点t的垂深1100m,N坐标210m,E坐标130m;用四种曲线分别设计该待钻井眼轨道。
设计结果见表1。
表1 四种曲线的设计结果线。
设计井段最短将带来少打进尺的效益;井眼曲率最小表明需要的造斜工具的造斜能力最小。
所以从理论上讲,斜面圆弧曲线应该是最优的轨道设计曲线。
但是要在施工中钻出斜面圆弧曲线形的井眼,却是非常困难的。
我们不去说没有MWD 的情况下难以钻出,即使有了MWD 也是难以钻出。
因为目前的MWD 可以显示给司钻的除了井斜角和井斜方位角外,只有造斜工具的装置角(即高边模式的工具面角)。
而斜面圆弧曲线的装置角是在不断变化之中,司钻不可能看着装置角进行轨迹控制。
解决此问题,需要另辟新径。
二.斜面圆弧曲线的基本特性我们需要研究的不是斜面圆弧的所有特性,而是斜面圆弧曲线作为三维定向井轨道设计曲线的基本特性。
1.斜面圆弧的基本参数如图1所示,1点是斜面圆弧的上端点,井斜角为α1,井斜方位角为φ1;2点是斜面圆弧的下端点,井斜角为α2,井斜方位角为φ2;12井段的长度为ΔL ;这五个参数便是斜面圆弧曲线的基本参数。
据此,我们可以求得该段圆弧井眼的狗腿角γ以及井眼曲率K 和曲率半径R 。
φααααγ∆+=cos sin sin cos cos cos 2121 (1)图1 斜面圆弧的基本特性ΔLL K ∆=γ(2)γL K R ∆==1 (3)2.斜平面的特征参数空间一个斜平面的特征参数包括:该斜平面的倾斜角α0和倾斜方位角φ0。
就是说,只要倾斜角和倾斜方位角确定了,该斜平面也就是唯一的了。
那么,当我们已知斜面圆弧的基本参数时,如何求得该斜面圆弧所在的斜平面的特征参数呢?根据空间几何原理可以得到如下计算α0和φ0的公式:φααφαφ∆-∆=∆sin cos 2121tg tg tg tg (4)110φφφ∆-= (5)110cos φαα∆⋅=tg tg (6)3.斜面圆弧上任一点的井斜角和井斜方位角当我们已知一条斜面圆弧曲线的上下两个端点的井斜角和井斜方位角时,我们可以很容易地求得斜面圆弧上任一点i 的井斜角和井斜方位角。
设斜面圆弧上任一点i 到上端点的长度为ΔL i ,并用(1)式求得γ,其他计算公式如下: [])cos(sin sin cos cos cos 0110101φφααααγγ-++∆∆=-LL i i (7) ]cos [cos cos 01αγα⋅=-i i (8)⎪⎪⎭⎫ ⎝⎛±=-010sin αγφφi i tg tg (9)注意,(9)式中,增方位时取“+”,减方位时取“-”。
4.斜面圆弧基本参数与装置角的关系关于斜面圆弧五个基本参数与装置角之间的关系,文献[2]中已有详细地论述和推导过程。
斜面圆弧的上端点装置角可用下式表示:111221cos sin cos sin )cos(sin cos αγγαφφαω--= (10)斜面圆弧上任一点i 点的装置角ωi 可用下是求得:i i i i o i γααγαωsin sin cos cos cos cos 18001-±=- (11)式中的γi 和αi 可由(7)(8)式计算。
式中的“±”号,增方位取“-”号;减方位取“+”号。
由(11)是可以看出,斜面圆弧的装置角(即高边模式的工具面角)在随着井斜角和井斜方位角的变化而不断地连续地变化着。
我们还可以证明斜面圆弧上任一点的“磁北模式的工具面角”也在不断地连续地变化。
作者曾在文献[2]中写道:“从理论上讲,弯接头斜面法扭方位,即保持装置方位角不变钻出的井眼轴线是一条圆滑的曲线,而且这条圆滑曲线乃是空间一斜平面上的圆弧曲线。
”进一步研究表明,这段论述是不正确的。
可以证明,斜面圆弧曲线的“装置方位角”也是在不断地连续地变化的。
所有这些变化,都给轨迹控制带来了困难。
三.斜面圆弧井眼的轨迹控制方法一般来说,斜面圆弧井眼的轨迹控制需要解决两个问题。
首要问题是工具的造斜率要与设计轨道曲线的曲率完全相等。
这需要根据轨道设计曲线的曲率去选择造斜工具。
但是在实际工作中,影响工具造斜率的因素太多,要想做到造斜率和设计曲率完全相等是不可能的。
自从有了导向钻井系统之后,这个问题得到了较好地解决。
选择造斜率大于设计曲率的造斜工具,采用导向钻井方式,基本上可以做到实钻井眼的造斜率和设计曲率相等。
所以,此问题本文不再讨论。
第二是解决工具造斜率的分配问题。
因为井眼曲线的方向是在不断变化中,这种变化是用每一点的井斜角和井斜方位角来描述的,所以需要解决造斜率的多少用于改变井斜角,多少用于改变井斜方位角。
在二维定向井中,由于井斜方位角没有变化,只要定向造斜时的方位是准确的,钻进中就无需改变。
造斜率的分配是100%用于改变井斜角,钻出的井眼轨迹是铅垂平面上的圆弧曲线。
二维定向井可以采用“装置角模式” 进行轨迹控制,其方法非常简单:增斜时装置角为0o ,降斜时装置角为180o 。
在三维定向井中,设计轨道是空间斜平面上的圆弧曲线,井斜角和井斜方位角都在不断地变化中,造斜率的分配比例也应该是不断变化的。
在MWD 出现前,人们采取的轨迹控制方法是:先计算出斜面圆弧曲线的上端点装置角,按此装置角给造斜工具定向;然后在钻进中始终保持钻柱不旋转(用转盘锁住方钻杆)。
从原理上讲,这样钻出的曲线应该是斜面圆弧,但是由于动力钻具反扭角不可能准确计算,实际的工具面总是偏离设计的斜平面,所以在没有MWD 的情况下是不可能钻出斜面圆弧曲线的井眼的。
在MWD 出现之后,可以在司钻显示屏上不断显示出造斜工具的装置角。
从原理上讲,用不断控制装置角可以不断控制造斜率的分配比例。
但在实际工作中,即使我们事先计算出设计轨道上每一点的装置角,司钻也不可能按照此不断变化的装置角进行控制,实际的操作太困难。
我们需要寻找一个在钻进斜面圆弧形井眼的过程中始终不变的特征参数,符合这个要求的参数有两个,即斜平面的倾斜角和倾斜方位角。
从原理上讲,一条确定的斜面圆弧曲线一定对应着一个确定的斜平面,该斜平面的的倾角α0和倾斜方位角φ0也就是确定的。
α0和φ0可以根据本文提供的(4)(5)(6)式计算。
如果在钻进中,实际轨迹离开了设计曲线,井斜角和井斜方位角必然和设计值不相同,实钻曲线必然不在设计的斜平面上。
设计曲线和实钻曲线上的任一点都有自己的井斜角、井斜方位角和装置角。
实钻的井斜角和井斜方位角是否符合设计值,关键在于实钻的装置角是否与设计值相等。
只要二者相等(而且工具造斜率也同时与设计曲率相等),实钻井斜角和井斜方位角必然与设计值相等,实钻曲线的斜平面必然与设计斜平面相重合,即实钻的斜面倾角必然与设计的斜面倾角相等。
所以,我们可以根据实钻曲线上任一点的井斜角、井斜方位角和装置角,计算出一个与实钻曲线对应的斜平面的倾角α0i 和倾斜方位角φ0i 。
与设计计曲线所在斜平面的倾角α0和倾斜方位角φ0进行比较,就可以判断实钻曲线是否与设计曲线相符合。
通过恰当的处理,仅仅比较实钻斜平面的倾角α0i 和设计计斜平面的倾角α0,就可以判断实钻曲线是否与设计曲线相符合。
如果在MWD 的司钻显示屏上,不是显示装置角,而是显示实钻斜平面的倾斜角α0i ,司钻就可以看着这个倾角进行轨迹控制钻进。
当显示的倾角与设计值不相等时,司钻可以转动钻柱进行调整(钻柱转动,则装置角变化,实钻的斜平面也在变化),在整个钻进中始终保持这个斜平面的倾角不变,就可以钻出斜面圆弧形的井眼。
为了与目前广泛采用的“装置角模式(Tool-face angle mode )”相区别,本文提出的轨迹控制模式可以命名为“斜平面角模式(Inclined-plane angle mode )”。
要显示实钻轨迹的斜平面倾角,就需要先计算出实钻斜平面倾角。
根据设计轨道可以计算设计计斜平面的倾角α0和倾斜方位角φ0,在钻进中可以实测出实钻轨迹的井斜角αi 、井斜方位角φi 和装置角ωi 。
从而可以计算出实钻斜平面的倾角α0i)cos(sin sin cos cos cos 000φφααααγ-+=i i i i)180cos(sin sin cos cos cos 0o i i i i i i --=ωγαγαα四.结论及建议1.斜面圆弧曲线是三维定向井轨道设计的最优曲线,曲率最小,设计井段最短。
2.本文对斜面圆弧曲线及其与所在斜平面的关系进行了深入研究,得出了有关参数的计算公式。
3.本文提出了一种轨迹控制的新的“斜平面角模式”。
控制实钻轨迹的“斜平面倾角”,使之于设计的斜平面倾角相等,可以准确地钻出斜面圆弧形井眼。
4.本文向全世界所有MWD 生产厂家建议:司钻显示屏应该有两种显示模式,一种是“装置角”模式,可以钻出恒装置角曲线的井眼;另一种是“斜面倾角”模式,可以钻出斜面圆弧形井眼。
两种模式应该能很容易转换。