2-1 概述
- 格式:ppt
- 大小:127.50 KB
- 文档页数:5
邀请信【文体概述】邀请信包括宴会、舞会、晚餐、婚礼等各种邀请信件。
要求叙事一定要清楚、明白,要写清楚三个方面内容:1. 邀请对方参加活动的具体内容、时间和地点;2. 邀请对方的原因;3. 期待对方接受邀请。
【常用语块】1. 邀请某人做某事_________________________________2. 代表某人_________________________________3. 为了做某事_________________________________4. 计划/打算做某事_________________________________5. 拓展某人的视野_________________________________6. 丰富某人的生活_________________________________7. 接受某人的邀请_________________________________8. 玩得开心_________________________________9. 在学校会议厅_________________________________10. 表演节目_________________________________11. 渴望你的到来_________________________________12. 学生会_________________________________13. 参加聚会_________________________________14. 给某人留下深刻的印象_________________________________15. 有信心_________________________________【套用句式】1. 作为他们的代表,我写信是想邀请你……___________________________________________________________________________2. 这是(关于这次活动的)简要日程计划表。


XC系列可编程控制器用户手册[特殊指令篇](XC1/XC2/XC3/XC5/XCM/XCC)信捷科技电子有限公司资料编号 PC13 20101120 3.3信捷电子XC系列可编程控制器用户手册[特殊指令篇] (XC1/XC2/XC3/XC5/XCM/XCC)资料编号PC13 20101120 3.31234 前言————————————————————PID控制功能————————————————————C语言功能块————————————————————顺序功能块BLOCK————————————————————特殊功能指令————————————————————附录————————————————————基本说明z感谢您购买了信捷XC系列可编程序控制器。
z本手册主要介绍XC系列可编程序控制器的高级指令应用等内容。
z在使用产品之前,请仔细阅读本手册,并在充分理解手册内容的前提下,进行接线。
z软件及硬件方面的介绍,请查阅相关手册。
z请将本手册交付给最终用户。
用户须知z只有具备一定的电气知识的操作人员才可以对产品进行接线等其他操作,如有使用不明的地方,请咨询本公司的技术部门。
z手册等其他技术资料中所列举的示例仅供用户理解、参考用,不保证一定动作。
z将该产品与其他产品组合使用的时候,请确认是否符合有关规格、原则等。
z使用该产品时,请自行确认是否符合要求以及安全,对于本产品故障而可能引发机器故障或损失时,请自行设置后备及安全功能。
责任申明z手册中的内容虽然已经过仔细的核对,但差错难免,我们不能保证完全一致。
z我们会经常检查手册中的内容,并在后续版本中进行更正,欢迎提出宝贵意见。
z手册中所介绍的内容,如有变动,请谅解不另行通知。
联系方式如果您有任何关于本产品的使用问题,请与购买产品的代理商、办事处联系,也可以直接与信捷公司联系。
z电话:0510-******** 85123803z传真:0510-********z地址:无锡市滴翠路100号创意产业园7号楼4楼z邮编:214072目录前言..............................................................................................................................................- 1 - 本手册的内容构成..............................................................................................................- 1 - 手册的适用范围..................................................................................................................- 2 - 手册中的约定俗成..............................................................................................................- 3 - 关联手册..............................................................................................................................- 3 - 手册的获取途径..................................................................................................................- 4 - 1 PID控制功能 (1)1-1.概述 (2)1-2.指令形式 (2)1-3.参数设置 (4)1-3-1.寄存器定义表 (4)1-3-2.参数说明 (5)1-4.自整定模式 (7)1-5.高级模式 (8)1-6.应用要点 (9)1-7.程序举例 (9)2 C语言功能块 (11)2-1.概述 (12)2-2.指令形式 (12)2-3.操作步骤 (13)2-4.函数的导入、导出 (15)2-5.功能块的编辑 (16)2-6.程序举例 (17)2-7.应用要点 (18)2-8.函数表 (19)3 顺序功能块BLOCK (21)3-1.BLOCK基本概念 (23)3-1-1.BLOCK概述 (23)3-1-2.引入BLOCK的原因 (24)3-2.BLOCK的调用 (25)3-2-1.BLOCK的添加 (25)3-2-2.BLOCK的转移 (28)3-2-3.BLOCK的删除 (29)3-2-4.BLOCK的修改 (29)3-3.BLOCK内部指令的编辑 (31)3-3-1.命令语列表 (31)3-3-2.脉冲配置 (33)3-3-3.Modbus指令 (34)3-3-4.Wait指令 (34)3-3-5.变频器配置 (35)3-3-6.自由格式通讯 (39)3-4.BLOCK的执行方式 (41)3-5.BLOCK内部指令的编写要求 (44)3-6.BLOCK相关指令 (46)3-6-1.指令说明 (46)3-6-2.指令的执行时序 (48)3-7.BLOCK执行标志位/寄存器 (52)3-8.程序举例 (53)4 特殊功能指令 (55)4-1.脉宽调制[PWM] (57)4-2.频率测量[FRQM] (58)4-3.精确定时[STR]、[STRR]、[STRS] (60)4-4.中断[EI]、[DI]、[IRET] (63)4-4-1.外部中断 (63)4-4-2.定时中断 (67)附录1 特殊功能版本要求 (69)附录2 PLC资源冲突表 (70)本手册涉及XC系列可编程控制器的高级指令的应用,主要介绍XC系列可编程控制器的本体PID控制指令、C语言功能块、顺序功能块BLOCK、特殊功能指令等,各章节内容概览如下:1.PID控制功能本章重点介绍本体XC系列PID指令的应用,包括指令的调用、参数的设定,使用注意点,程序例等。
古典控制理论基础习题及答案古典控制理论基础习题详解⼀概述2-1-1 试⽐较开环控制系统和闭环控制系统的优缺点。
2-1-2试列举⼏个⽇常⽣活中的开环和闭环控制系统的例⼦,并说明其⼯作原理。
2-1-3 试判断下列微分⽅程所描述的系统属何种类型(线性、⾮线性;定常、时变)。
2-1-4 根据题2-1-1图所⽰的电Array动机速度控制系统⼯作原理图:(1)将a,b与c,d⽤线连接成负反馈系统;(2)画出系统⽅框图。
2-1-5 下图是⽔位控制系统的⽰意图,图中Q,2Q分别为进⽔流量和Array 1出⽔流量。
控制的⽬的是保持⽔位为⼀定的⾼度。
试说明该系统的⼯作原理并画出其⽅框图。
2-1-6 仓库⼤门⾃动控制系统如图所⽰,试分析系统的⼯作原理,绘制系统的⽅框图,指出各实际元件的功能及输⼊、输出量。
⼆控制系统的数学模型2-2-1 试建⽴下图所⽰各系统的微分⽅程并说明这些微分⽅程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输⼊量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
2-2-3 ⼯业上常⽤孔板和差压变送器测量流体的流量。
通过孔板的流量Q 与孔板前后的试将流量⽅程线性化。
2-2-4 系统的微分⽅程组为:2-2-6 。
(a ) (b )(c )(d ) 题2-2-6图2-2-8 设线性系统结构图如题2-2-8图所⽰,试(1)画出系统的信号流图;(2)题2-2-10图2-2-11 系统微分⽅程如下:)(b )(a 题2-2-7图题2-2-12图三时域分析法2-3-1 若某系统,当零初始条件下的单位阶跃响应为t t e e t c --+-=21)(试求系统的传递函数和脉冲响应。
2-3-2 ⼆阶系统单位阶跃响应曲线如图所⽰,试确定系统开环传递函数。
设系统为单位负反馈式。
2-2-3 已知系统的结构图如图所⽰(1)当0=d k 时,求系统的阻尼⽐ξ,⽆阻尼振荡频率n ω和单位斜坡输⼊时的稳态误题2-3-2图.1差;(2)确定d k 以使707.0=ξ,并求此时当输⼊为单位斜坡函数时系统的稳态误差。
第一章引论·1-1电力系统的组成要素1. 电力系统由电厂、电网、用户三部分组成。
√.2. 电力系统由发、变、输、配、用五部分组成。
√.3. 变电,包括升压变电、降压变电。
√.4. 电网的作用是将电能从发电厂从输送、并分配到电能用户。
√.5. 电网由电力线路、变配所组成。
√.6. 电力线路按其架设方法可分为架空线路和电缆线路。
√.7. 变配所是配电所的别称。
x.8. 配电所是改变电压的地方。
x.9. 变电所是分配电能的地方。
x.10. 电能最大的用户是同步电动机。
x.第一章引论·1-2电力系统的额定电压1. 发电机的额定电压比线路的额定电压高出(C )A.1% B.3% C.5% D.10%2. 变压器副边接负载时额定电压比负载的高出 CA.1% B.3% C.5% D.10%3. 变压器副边接线路时额定电压比线路的高出DA.1% B.3% C.5% D.10%4. 电能的质量指标有:ABA.电压B.频率C.电流5. 电网额定电压是指线路的额定电压。
√.6. 负载的额定电压与线路的额定电压不同。
x.7. 变压器原边接线路时额定电压与线路额定电压不同。
x.8. 变压器原边接发电机时额定电压与发电机的不同。
x.9. 线路的额定电压是指线路首端、末端的平均电压。
√.10. 同一电压线路一般允许的电压偏差是±10%。
x.第一章引论·1-3电力系统的中运方式1. 电力系统的中运方式分为中点接地、中点不接地两大类。
√.2. 中点接地系统的可靠性较好。
x.3. 中点不接地系统的经济性较差。
√.4. 中性点不接地系统包括中点不接地、中点经阻抗接地两种。
√.5. 小电流接地方式包括中点不接地一种。
x.6. 大电流接地方式包括中点接地一种。
√.7. 中点不接地系统发生单相接地时,两个完好相的首端电位都升高到线电压水平。
√.8. 中性点经消弧线圈接地的电力系统在单相接地时,其他两相√地电压不会升高到线电压。
二自由度机器人角度控制仿真摘要近二十年来,机器人技术发展非常迅速,各种用途的机器人在各个领域广泛获得应用。
我国在机器人的研究和应用方面与工业化国家相比还有一定的差距,因此研究和设计各种用途的机器人特别是工业机器人、推广机器人的应用是有现实意义的。
本次设计主要是对二自由度机器人的位置控制进行设计和仿真,采用了PD控制方法,运用MATLAB语言、Simulink及Robot工具箱,搭建二自由度机器人的几何模型、动力学模型。
并构建控制器的模型,通过调整控制器参数,对二自由度机器人的位姿进行控制,并将实验中采集到数据导入到MATLAB环境中进行仿真,达到较好的控制效果。
关键词:PD,运动学,二自由度机器人Two degrees of freedom robot Angle control simulationABSTRACTOver the past twenty years, robot technology is developing very rapidly, various USES of robots in all fields widely. In research and application of robot in our country, there is still a gap compared with industrialized countries, so the research and design all kinds of robots, especially industrial robot, the promotion of the use of robots has a realistic significance.This design is mainly for two degrees of freedom Robot position control design and simulation, the PD control method is adopted, using the MATLAB language, the Simulink and Robot kit, two degrees of freedom Robot geometry model, the dynamic model. And build the model of the controller, by adjusting the controller parameters, to control two degrees of freedom robot pose, and the experiment collected data imported to MATLAB simulation environment, achieve good control effect.KEY WORDS: PD,motion control,2-DOF parallel robot目录前言 (1)第1章绪论 (2)1.1 研究背景 (2)1.2 选题的意义 (2)第2章机器人运动学及动力学 (4)2.1 运动学概述 (4)2.2 机械手 (4)2.2.1 机器手的机构和运动 (4)2.2.2 运动学及动力学关系 (6)2.3 动力学概述 (8)2.4惯性矩分析 (8)2.5拉格朗日运动学方程 (9)第3章机器人运动控制系统 (13)3.1 概述 (13)3.1.1 机器人控制特点 (13)3.1.2 机器人控制方式 (14)3.2 PD控制器 (14)第4章MATLAB软件 (16)4.1 MATLAB简介 (16)4.2 MATLAB的优势 (17)4.3 SIMULINK仿真以及ROBOT TOOLBOOX (19)第5章动态仿真 (21)5.1 机器人模拟参数 (21)5.2 机器人运动学模型 (22)5.3 机器人动力学模型 (23)5.4 动力学与运动学模型联立 (24)结论 (28)谢辞 (29)参考文献 (30)外文资料翻译 (32)前言机器人是二十世纪人类最伟大的发明之一,人类对于机器人的研究由来已久。
第2章浇注系统§2-1 概述§2-2 液态金属在浇注系统中的流动§2-3 浇注系统类型及其应用范围§2-4 铸铁件浇注系统计算方法§2-5 其它合金铸件浇注系统特点§2-1 概述1.浇注系统浇注系统是铸型中使液态金属充填型腔的通道。
浇注系统设置不当,常使铸件产生冲砂、夹砂、缩孔、缩松、裂纹、冷隔,以及气孔等多种缺陷,甚至会使铸件报废。
因此,正确的设计浇注系统,对提高铸件质量及降低生产成本具有重要意义。
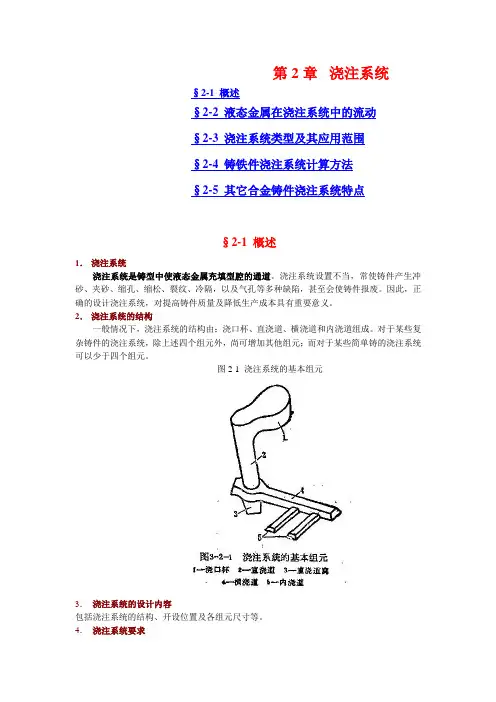
2.浇注系统的结构一般情况下,浇注系统的结构由:浇口杯、直浇道、横浇道和内浇道组成。
对于某些复杂铸件的浇注系统,除上述四个组元外,尚可增加其他组元;而对于某些简单铸的浇注系统可以少于四个组元。
图2-1 浇注系统的基本组元3.浇注系统的设计内容包括浇注系统的结构、开设位置及各组元尺寸等。
4.浇注系统要求良好的浇注系统通常满足以下几点要求:1) 控制金属液流动的速度和方向,并保证充满型腔,保证适当的浇注时间。
2) 金属注入方式及内浇口方向应不致使金属冲毁铸型或砂型,并有利于杂质上浮和型中气体排出。
金属液在型腔中的流动应平稳、均匀以免夹带空气、产生金属氧化物。
3)有利于铸件温度的合理分布。
(铸型充满后,型内金属的温度分布状态尽可能有利于铸件预期的凝固方式。
希望同时凝固的铸件,温度应分布均匀;希望顺序凝固的铸件,温度应朝向冒口递增。
)4)浇注系统应具有除渣功能。
生产无锡青铜、球墨铸铁等铸铁件,要求浇注系统具有较强的挡渣能力,以防止溶渣进入铸型。
5)浇注系统不应阻碍铸件收缩,在生产裂纹敏感性强的大型铸件时,这点尤为重要。
6)在保证铸件质量的前提下,浇注系统力求简单,便于造型,金属消耗量最少,以及有利于铸件清理。
附加:对浇注系统的基本要求由以上的叙述大致上可以看出,浇注系统对铸件质量的影响是多方面的,其作用显然是重要的。
对浇注系统的基本要求如下:(1)根据铸件结构和合金凝固特点考虑浇注系统的结构,使金属液能以合理的充填速度或上升速度、尽可能平稳地(紊流程度低)、无喷射、飞溅地充填型腔;金属流股不冲蚀砂型或砂芯,也不在型内相互冲击,防止卷入气体和吸收气体,防止金属氧化。
铁路应用——具有特殊防火性能铁路机车车辆电力和控制电缆第2-1部分:单芯交联橡胶绝缘电缆简介EN50264涉及到用于铁路车辆的系列电缆,该系列电缆属于采用无卤材料的护套以及无护套电缆。
该标准分为5部分:第1部分一般要求;第2-1部分单芯交联橡胶绝缘电缆;第2-2部分多芯交联橡胶绝缘电缆;第3-1部分小尺寸多芯交联橡胶绝缘电缆;第3-2部分小尺寸多芯交联橡胶绝缘电缆。
电缆选型和安装(包括额定电流)见EN50355和EN50343。
电缆截面积选择(包括减少环境温度和安装类型因素)见EN50343。
EN50264中涉及的特殊测试方法见EN50305。
EN50264-2-1中的电缆可用于EN50264-2-2组成多芯电缆。
第1部分“一般要求”对EN50264做出了更详尽的介绍,应与第2-1部分一起使用。
1.范围E N50264-2-1规定了对下列型号及额定电压下的单芯电缆的要求、结构及尺寸。
●0.6/1kV无屏蔽、无护套电缆(1mm2到400mm2)●1.8/3kV无屏蔽、无护套电缆(1.5mm2到400mm2)●1.8/3kV无屏蔽、护套电缆(1.5mm2到400mm2)●3.6/6kV无屏蔽、护套电缆(2.5mm2到400mm2)所有的电缆采用EN60228规定的5类镀锡铜线,且为无卤绝缘和无卤护套。
这些电缆用于铁路机车固定线缆,或者操作时会碰到极限挠度的布线。
要求连续导线温度不超过90℃,在5秒内,短路条件下最大温度为200℃。
发生火灾时,电缆在最大允许火焰传播(火焰蔓延),最大允许烟雾及有毒气体释放等方面具有特殊的性能。
EN50264-2-1应与第1部分“一般要求”一起使用。
2.引用标准以下引用的文件对于实施本文件是必不可少的。
凡注日期的引用文件,最新版不适用于本标准。
不注日期的引用文件,其最新版(包括任何修订)适用于本标准。
EN10002-1金属材料—拉伸测试—室温条件下试验方法EN50264-1:2008铁路应用—具有特殊防火性能铁路机车车辆电力和控制电缆第1部分:一般要求EN50266-2-4电缆在火焰条件下的通用试验方法—垂直安装的成束电线或电缆的垂直火焰蔓延试验第2-4部分:试验步骤—C类EN50266-2-5电缆在火焰条件下的通用试验方法—垂直安装的成束电线或电缆的垂直火焰蔓延试验第2-5部分:试验步骤—小电缆—D类EN50305:2002铁路应用-具有特殊防火性能铁路机车车辆电缆-测试方法EN60228电缆的导体(IEC60228)EN60811-1-3:1995电缆和光缆绝缘和护套材料的—通用试验方法第1-3部分:一般应用—密度测定方法—吸水试验—回缩试验(IEC60811-1-3:1993)EN60811-1-2:1995电缆绝缘和护套材料的—通用试验方法第1-2部分:一般应用—热老化试验(IEC60811-1-2:1985+A1:1989+corr.May1986)EN60811-1-3:1995电缆和光缆绝缘和护套材料的—通用试验方法第1-3部分:一般应用—密度测定方法—吸水试验—回缩试验(IEC60811-1-3:1993EN60811-1-4:1995电缆和光缆绝缘和护套材料的—通用试验方法第1-4部分:一般应用—低温试验(IEC60811-1-4:1985+A11993+corr.May1986)EN60811-2-1:1998电缆和光缆绝缘和护套材料的—通用试验方法第2-1部分:一般应用—橡胶混合物测试方法—耐臭氧试验、热延伸试验和浸矿物油试验(IEC60811-2-1:1998)EN61034-2电缆在特定条件下燃烧的烟密度测定第2部分:试验步骤和要求(IEC61034-2)HD308电缆与软线的芯线标记3.定义EN50264-1的定义适用于本标准。