【管理资料】机械原理第四章作业.汇编
- 格式:ppt
- 大小:240.00 KB
- 文档页数:22
机械原理作业集1. 弹簧的工作原理。
弹簧是一种储存和释放能量的装置,它的工作原理是利用弹性变形来储存能量。
当外力作用在弹簧上时,弹簧会发生形变,将外力储存在其中。
当外力消失时,弹簧会释放储存的能量,将形变恢复原状。
弹簧的工作原理在机械原理中有着广泛的应用,例如弹簧悬挂系统、弹簧减震系统等。
2. 齿轮传动的优势。
齿轮传动是一种常见的机械传动方式,它的优势在于传动效率高、传动比稳定、传动精度高等特点。
齿轮传动可以将动力从一个轴传递到另一个轴,同时可以改变转速和转矩。
在机械原理中,齿轮传动被广泛应用于各种机械设备中,如汽车变速箱、工业机械等。
3. 杠杆原理及应用。
杠杆是一种简单机械,它的作用是将力量或运动转换成另一种形式。
杠杆原理是利用杠杆的支点和力臂的长度差异来增大或减小力的作用效果。
在实际应用中,杠杆被广泛应用于各种机械装置中,如千斤顶、剪刀、门锁等。
4. 摩擦力的影响。
摩擦力是一种阻碍物体相对运动的力,它的大小取决于物体间的接触面积和摩擦系数。
在机械原理中,摩擦力对机械装置的运动有着重要的影响。
合理利用摩擦力可以增加机械装置的稳定性和安全性,同时也可以减小能量损耗,提高机械效率。
5. 原动机的选择。
在机械装置中,原动机的选择是非常重要的。
不同的原动机适用于不同的工作环境和工作要求。
例如,电动机适用于需要稳定转速和精确控制的场合,而内燃机适用于需要大功率输出和移动性的场合。
正确选择原动机可以提高机械装置的效率和可靠性。
6. 机械传动的维护。
机械传动在长时间工作后需要进行维护保养,以确保其正常运行。
常见的维护工作包括润滑、紧固、清洁等。
定期的维护保养可以延长机械传动的使用寿命,减小故障率,提高工作效率。
7. 机械原理的应用。
机械原理在现代工程中有着广泛的应用,涉及到机械设计、机械制造、机械维护等方面。
了解和掌握机械原理对于工程师和技术人员来说是非常重要的,它可以帮助他们更好地设计和制造机械装置,解决实际工程中的问题。
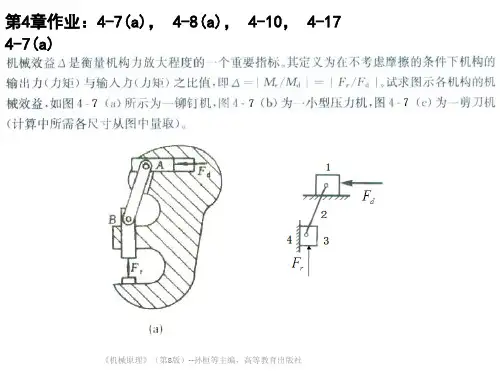
机械原理第四章答案【篇一:西北工业大学机械原理课后答案第4章】(a) (b)(c)解:(a)作铆钉机的机构运动简图及受力见下图(a)由构件3的力平衡条件有:fr?fr43?fr23?0?fr41?fd?0由构件1的力平衡条件有:fr21按上面两式作力的多边形见图(b)得??frfd?cot?(b)作压力机的机构运动简图及受力图见(c)由滑块5的力平衡条件有:?r65由构件2的力平衡条件有:r42 ?r45?0?r32?r12?0 其中 r42?r54按上面两式作力的多边形见图(d),得??gft(c) 对a点取矩时有 fr?a?fd?b ??其中a、b为fr、fd两力距离a 点的力臂。
??gftfdfr43rgdr41(a)(b)(d)解:1) 选定比例尺,?l?0.005绘制机构运动简图。
(图(a) )2)运动分析:以比例尺?v作速度多边形,如图 (b) 以比例尺?a作加速度多边形如图4-1 (c)ac??apc?23.44s2?210as2??aps2s2t?ancac2b?2???51502slbc?lbc3) 确定惯性力活塞3:fi3??m3as3??g3gac?3767(n) 方向与pc相反。
连杆2:fi32??m2as2??g2相反。
as2?5357(n) 方向与p?s2mi2??js2?2?218.8(n?m) (顺时针)总惯性力:fi?2?fi2?5357(n)lh2?mi2i2?0.04(m) (图(a) )(b)(c)解:1)求图a所示导轨副的当量摩擦系数fv,把重量g分解为g 左,g右g左?l2lg , g右?1g , fvg?ff左?ff右l1?l2l1?l2l?f??2??l1??fv??l1?l2l?f??2??l1??g??l1?l22)求图b所示转动副的摩擦圆半径?支反力fr左?l2lg ,fr右?1g l1?l2l1?l2假设支撑的左右两端均只在下半周上近似均匀接触。
机械原理习题集答案第一章:机械运动学1. 问题:简述平面运动的基本概念。
答案:平面运动是指物体在平面内的运动,其轨迹可以是直线或曲线。
在平面运动中,物体的每一个点都在同一平面内移动。
2. 问题:什么是四杆机构的运动规律?答案:四杆机构是最基本的机械机构之一,其运动规律取决于杆的长度和连接方式。
常见的四杆机构有双曲柄机构、曲柄滑块机构等。
第二章:机械动力学1. 问题:牛顿运动定律在机械设计中的应用是什么?答案:牛顿运动定律是描述物体运动的基本定律,包括惯性定律、力的作用与反作用定律和作用力与加速度的关系。
在机械设计中,这些定律用于预测和计算机械系统的运动状态和受力情况。
2. 问题:简述达朗贝尔原理。
答案:达朗贝尔原理是动力学中的一个基本原理,它指出在没有外力作用的系统中,系统内各部分的动量守恒。
在机械设计中,这一原理常用于分析和计算机械系统的动态平衡。
第三章:机构设计与分析1. 问题:什么是机构的自由度?答案:机构的自由度是指在没有约束的情况下,机构能够独立进行的运动的数量。
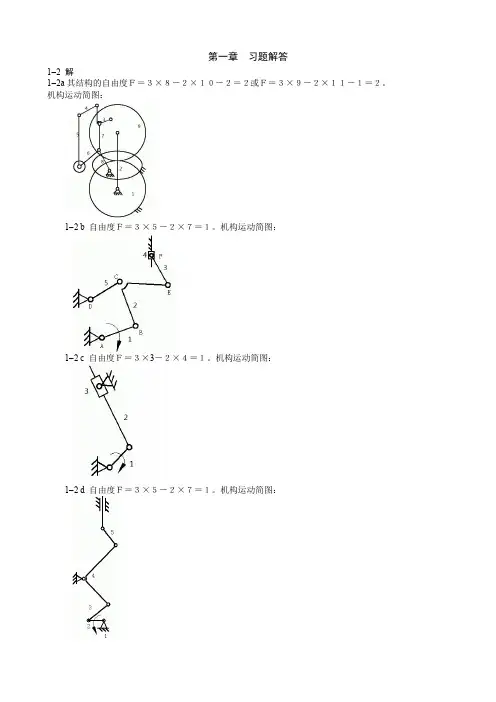
自由度的计算公式为:\( F = 3n - 2j - h \),其中\( n \)是机构中杆件的数量,\( j \)是铰链的数量,\( h \)是高副的数量。
2. 问题:如何确定一个机构的运动类型?答案:确定机构的运动类型需要分析机构的几何形状和连接方式。
例如,如果机构中存在曲柄和滑块,它可能是一个曲柄滑块机构,其运动类型为往复直线运动。
第四章:机械结构设计1. 问题:机械结构设计中需要考虑哪些因素?答案:在机械结构设计中,需要考虑的因素包括材料的选择、强度和刚度的计算、尺寸的确定、成本控制、维护的便利性等。
2. 问题:什么是疲劳强度?答案:疲劳强度是指材料在反复加载和卸载过程中抵抗断裂的能力。
在机械结构设计中,需要考虑疲劳强度以确保结构的可靠性和耐久性。
第五章:机械传动1. 问题:什么是齿轮传动?答案:齿轮传动是一种利用齿轮啮合来传递运动和动力的机械传动方式。
机械原理复习资料《机械原理复习⼤纲》(机械本科)⼀、基本要求测验应试学⽣是否达到应有⽔平,要求学⽣掌握机构学和机器动⼒学的基本理论和基本知识,学会常⽤基本机械的分析和综合。
考试以基本概念、基本原理和基本⽅法为主。
⼆、考试内容第⼀章绪论概念:机构、机器的特征第⼆章机构的构型分析(1)基本概念:构件、零件、运动副、运动链、球⾯副、环副、圆柱副、圆柱-平⾯副、球⾯-平⾯副、转动副、移动副、螺旋副(2)机构运动简图绘制(3)正确计算⾃由度主要是平⾯机构的⾃由度计算,要注意虚约束、局部⾃由度和复合铰链问题。
(4)机构的组成原理能够对机构进⾏拆分成有主动件和机架组成的主动链和由其余杆副组成的⾃由度为0的从动链。
例对以上计算⾃由度的机构的拆分)要求:习题2-1、2-2、2-3、2-4要会做。
也可以对上述⾃由度计算机构的记过级别进⾏判断。
第三章平⾯机构的运动分析了解机构运动分析的⽬的和⽅法,对简单基本机构进⾏运动分析。
§3-1 三⼼定理速度瞬⼼的概念,三⼼定理的应⽤,⽤速度瞬⼼法进⾏机构的速度分析。
习题3-11、试确定题图3-1所⽰各机构在图⽰位置的瞬⼼位置.2.在图⽰机构中,已知构件1以ω1沿顺时针⽅向转动,试⽤瞬⼼法求构件2的⾓速度ω2和构件4的速度v 4的⼤⼩(只需写出表达式)及⽅向。
3.图⽰齿轮连杆机构中,已知齿轮2和5的齿数相等,即z 2=z 5,齿轮2以ω2=100rad/s 顺时针⽅向转动,试⽤瞬⼼法求构件3的⾓速度ω3的⼤⼩和⽅向。
(取µL =0.001m/mm)4.图⽰机构的长度⽐例尺µL =0.001m/mm ,构件1以等⾓速度ω1=10rad/s顺时针⽅向转动。
LLG题2图试求:(1) 在图上标注出全部瞬⼼; (2)在此位置时构件3的⾓速度ω3的⼤⼩及⽅向§3-2 机构可动性分析1.死点:能够对书21页图3-8和图3-9分析。
2.机构具有曲柄的条件:习题3-43.图⽰铰链四杆机构。
第1章平面机构的结构分析解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题图题图绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
计算下列机构自由度,并说明注意事项。
计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题图题图第2章平面机构的运动分析试求图示各机构在图示位置时全部瞬心。
题图在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE=120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题图题图在图示机构中,已知l AB=50mm , l BC=200mm , x D=120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题图图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
(3)在给出的速度和加速度图中,给出构件2上D 点的速度矢量2pd 和加速度矢量2''d p 。
题图在图示机构中,已知机构尺寸l AB =50mm, l BC =100mm, l CD =20mm , 原动件的位置φ1=30º, 角速度ω1=ω4=20 rad/s ,试用相对运动矢量方程图解法求图示位置时构件2的角速度ω2和角加速度α2的大小和方向。