风机偏航毕业设计
- 格式:doc
- 大小:509.65 KB
- 文档页数:16
湘潭大学兴湘学院毕业设计说明书题目:风力发电机偏航传动系统的设计与分析专业:机械设计制造及其自动化学号:15*名:***指导教师:***完成日期:湘潭大学兴湘学院毕业论文(设计)任务书论文(设计)题目:风力发电机偏航传动系统的设计与分析学号:15 姓名:李超众专业:机械设计制造及其自动化指导教师:彭锐涛系主任:刘柏希一、主要内容及大体要求偏航系统是风力发电机组特有的伺服系统。
它主要有两个功能:一是使风轮跟踪变化稳定的风向;二是当风力发电机组由于偏航作用,机舱内引出的电缆发生缠绕时,自动解缆。
偏航系统是一个随动系统,风向仪将收集的信号传送给机舱柜的PLC的I/O 板,计算10分钟平均风向,与偏航角度绝对值编码器比较,输出指令驱动四台偏航电机(带失电制动),将机头朝正对的风向调整,并记录当前调整的角度,调整完毕电机停转并启动偏航制动。
主要内容:1. 了解大中型风力发电机系统的结构和原理;2. 熟悉风力发电机偏航系统的工作原理及结构;3. 基于三维设计软件SolidWorks 完成减速箱偏航齿轮及轴承的设计,并运用SolidWorks/motion模块对包括这些零部件的偏航系统进行动力学仿真。
大体要求:字数要求:8000字以上图纸在两张A0以上。
二、重点研究的问题该设计的重点在于设计行星轮减速器;对内部零部件如行星轮、太阳轮、轴、内齿圈等进行设计计算并对轴承键等进行安全校核。
运用SolidWorks对其进行三维造型并运用三维造型对其进行运动仿真。
三、进度安排四、应搜集的资料及主要参考文献[1].程乃士主编.减速器和变速器设计与选用手册[M].北京:机械工业出版社,2007.[2].廖念钊,古莹蓭,莫雨松等主编.互换性与技术测量[M].北京:中国计量出版社,2007.[3].濮良贵,纪名刚主编.机械设计(第八版)[M].北京:高等教育出版社,2006.[4].徐灏主编.机械设计手册[M].北京:机械工业出版社,2006.[5].成大先主编.机械设计手册单行本[M].化学工业出版社,2004.[6].宫靖远主编.风电工程技术手册[M].北京:机械工业出版社,2007.[7].Erich Hau 编著.Wind [M].2005.[8].陈超祥主编.SolidWorks Motion运动仿真教程[M].北京:机械工业出版社,2012.[9].陈超祥主编.SolidWorks Simulation基础教程[M].北京:机械工业出版社,2012.[10].CAD\CAM\CAE技术联盟主编.SolidWorks 2012中文版从入门到精通[M].北京:清华大学出版社,2012.[11].姚兴佳主编.风力发电技术讲座[M].沈阳工业大学风能技术研究所,2006.湘潭大学兴湘学院毕业论文(设计)评阅表学号15 姓名李超众专业机械设计制造及其自动化毕业论文(设计)题目:风力发电机偏航传动系统的设计与分析湘潭大学兴湘学院毕业论文(设计)鉴定意见学号:15 姓名:李超众专业:机械设计制造及其自动化毕业论文(设计说明书)40 页图表15 张目录[摘要]本次毕业设计的任务是风力发电机偏航传动系统的设计与分析,通过设计计算和校核计算,完成了所有的数据,并绘制出了图纸。
3MW风力发电机组偏航控制系统设计摘要:本文整体的设计需求是以3MW风力发电机组的控制系统为基础,核心采用德国Beckhoff生产的嵌入式PC控制器组成整体的控制系统。
主要内容依据模糊控制原理,主要设计是针对偏航系统的模糊控制自定义参数设计,实验采用MATLAB/simulink进行仿真,通过PLC实现F-PID控制,最后论证系统可行性。
1 风机控制系统组成风轮的组成包括桨叶、轮毂、风轮轴及变桨系统。
桨叶是获取风能及进行能量转化的部件。
轮毂主要是起固定作用的装置。
风轮轴起到把风轮旋转产生的机械能传递到发电机当中的作用,是风机关键性结构之一。
塔架用来支撑机舱和叶片,必须具有足够的静动强度来承载风轮转动所引起的震动载荷。
偏航系统主要由执行机构、控制器、传感器和偏航计数器等组成,主要包括主动和被动两种偏航方式。
变桨距功率调节机构主要由桨叶、导套、连杆、法兰、短转轴、长转轴、推动杆、支撑杆、同步盘、偏心盘、防转装置等部件组成。
变桨系统针对不断变化的风速,通过调整叶片攻角来保持功率的恒定。
同条件下两种功率调节方式对比见图1.1所示。
图1.1 变桨距与定桨距输出功率的对比构成风机的两大块部分为风力机和发电机,在风力发电机组吸收风能并对其尽可能地转化阶段中,起关键作用的是风机的控制系统。
如果把控制系统比作风机的大脑起到监控、预警等作用,那么PLC就是其中枢神经起着调节、指示作用。
针对不断变化的风,PLC通过对偏航系统发出指令调节控制桨叶位置,保证风能利用效率的最大化。
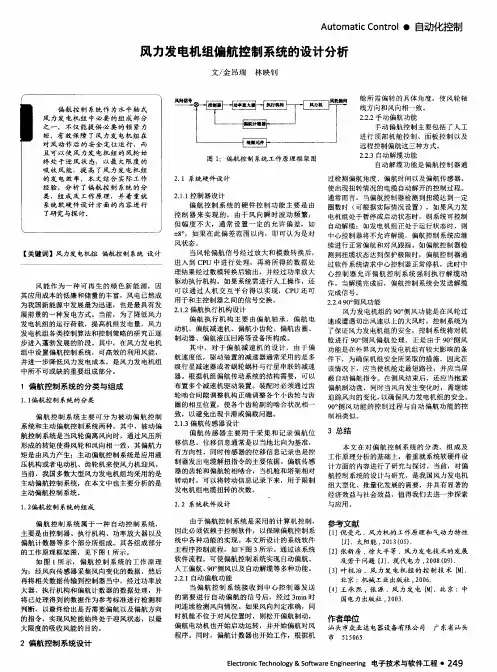
2 偏航控制系统设计风力发电机组偏航控制系统工作过程:风传感器把采集到的风向角度传送至PLC控制器,控制器对其进行判断预处理,若需对风则输出命令驱动偏航电机旋转至与风向正对90°的位置,来达到快速对风的目的。
偏航控制器的大脑MX213模块应用在M1控制系统中,它是在PC技术的基础上进行开发的,内部含有铁电FRAM,具有掉电数据不丢失的特点,且能安全储存十年以上。
理工学院毕业设计学生姓名:学号:专业:电气工程及其自动化题目:风力发电机组偏航系统自动控制设计指导教师:(教授)评阅教师:2013 年 6 月河北科技大学理工学院毕业设计成绩评定表注:该表一式两份,一份归档,一份装入学生毕业设计说明书(论文)中。
毕业设计中文摘要毕设计外文摘要目录1 绪论 (1)1.1风能的意义 (1)1.2国际风电技术的发展现状和趋势 (1)1.3我国风电技术的发展现状和趋势 (2)1.4风力发电控制技术现状 (4)2 风力发电机组系统构成及功能简介 (5)2.1风电机简介 (5)2.2风力发电的原理 (7)2.3风力发电机系统组成部分简介 (8)3 偏航控制系统功能和原理 (14)3.1偏航系统概述 (14)3.2偏航系统的组成 (14)3.3偏航控制机构 (15)3.4偏航驱动机构 (17)4 偏航控制系统设计及结果分析 (22)4.1偏航系统控制过程分析 (22)4.2 偏航控制系统整体方案设计 (25)4.3 结果分析 (41)5 结论 (42)致谢 (43)参考文献 (44)1 绪论1.1 风能的意义世界经济的快速发展和激烈的竞争,新能源发电尤其是风力发电技术日趋受到世界各国的普遍重视。
除水力发电技术外,风力发电是新能源发电技术中最成熟、最具大规模开发和最有商业化发展前景的发电方式。
由于在改善生态环境、优化能源结构、促进社会经济可持续发展等方面的突出作用,目前世界各国都在大力发展和研究风力发电及其相关技术。
风能取之不尽,用之不竭,是非常重要的一种洁净的可再生能源,是人类能源结构的转变中一个非常重要的部分。
风力发电是人们有效利用风能的方法之一,其技术在可再生能源利用中的运用也是比较成熟的。
风力发电是一项高新技术,它涉及到气象学、空气动力学、结构力学、计算机技术、电子控制技术、材料学、化学、机电工程、电气工程、环境科学、等十几个专业学科,是一项系统技术。
风力发电作为现在新能源利用的重要技术之一,电气工程和它是息息相关,密不可分的。

基于PCS7变桨距风力发电机组偏航控制系统设计毕业论文目录1 绪论 (1)1.1论文的背景和意义 (1)1.2国际风力发电的现状和趋势 (2)1.3国内风力发电的发展 (2)1.4当前我国风力发电亟待解决的难点 (4)1.5 我国风力发电的前景与展望 (4)1.6 本章小结 (5)2 风力发电机组系统构成及功能简介 (6)2.1 风力发电的原理 (6)2.1.1风力发电机的基本类型 (6)2.1.2现代风机 (7)2.1.3 现代风力发电的原理 (7)2.2风力发电机的组成结构 (8)2.2.1风力机桨叶系统 (9)2.2.2变桨距系统 (9)12.2.3风力机组传动系统 (10)2.2.4发电机系统 (11)2.2.5 偏航系统 (12)2.2.6 解锁装置 (12)2.2.7刹车系统 (12)2.2.8塔架 (13)2.3 风力发电机组的控制技术 (13)2.3.1风力发电机组控制系统 (13)2.3.2风力发电控制技术的发展趋势 (14)2.4本章小结 (15)3 风力发电机组偏航控制策略 (16)3.1偏航控制系统的基本结构 (16)3.1.1偏航轴承 (16)3.1.2偏航制动器 (17)3.1.3偏航控制驱动装置 (17)3.1.4偏航计数器 (17)3.1.5扭转保护装置 (17)3.2偏航控制系统的工作原理 (18)3.2.1自动偏航 (19)3.2.2 90度侧风控制 (20)3.2.3人工偏航控制 (21)3.2.4 自动解锁 (21)3.3偏航控制系统模糊控制策略 (21)3.4偏航控制系统模糊控制器的设计 (22)3.4.1模糊控制器的结构 (22)3.4.2 输入输出变量的模糊化 (22)3.4.3模糊控制规则表 (24)3.4.4风力发电机组偏航系统模糊控制器的仿真 (26)3.4.5 仿真结果与分析 (27)23.5 本章小结 (28)4 系统研制开发平台 (29)4.1.wincc软件的介绍 (29)4.2 风力发电偏航控制组态仿真平台设计 (29)4.2.1 wincc6.0的功能和优点 (29)4.2.2 监控系统的设计和功能实现 (30)4.3 step7软件的介绍 (30)4.4 PLC简介 (31)4.5 本章小结 (31)5 风力发电机组偏航控制系统设计 (33)5.1偏航控制系统总体设计 (33)5.2风力发电机组偏航控制系统硬件设计 (34)5.2.1设备选型 (34)5.2.2硬件电路图 (34)5.3风力发电机组偏航系统程序 (35)5.3.1风力发电机组自动偏航控制流程图 (35)5.3.2 人工偏航流程图 (36)5.3.3 自动解缆流程图 (36)5.4根据控制流程图设计PLC程序 (37)5.4.1机舱位置计算 (37)5.4.2风向角计算 (39)5.4.3自动偏航程序 (39)5.4.4自动解缆程序 (42)5.4.5偏航系统总程序 (45)5.4实验结果与分析 (46)6毕业设计总结 (48)参考文献: (49)外文论文 (51)中文译文 (59)3致谢·················································································错误!未定义书签。
基于PLC风机偏航系统解缆控制毕业设计风机偏航是指风机根据风向自动调整风轮的朝向,以最大程度地捕捉风能。
在风电场中,风机偏航系统是关键的控制系统之一,在保证风机正常工作的同时,还能提高风能的转换效率。
本毕业设计基于PLC控制技术,设计了一套风机偏航系统解缆控制方案。
解缆是指将风机与电网之间的连接断开,使得风机不再受电网的约束,可以自由调整偏航角度。
这种控制方案在风速过大或其他异常条件下,可以有效地保护风机避免损坏。
首先,本设计实现了风机偏航角度的检测与控制。
通过安装传感器,实时监测风机的偏航角度,并将其信号输入PLC控制器。
PLC控制器根据设定的偏航角度范围,判断风机是否需要调整朝向。
当偏航角度超过设定范围时,PLC控制器发送控制信号给风机,使其调整偏航角度。
其次,本设计实现了风机解缆控制。
当风机检测到异常情况时,PLC控制器会发送解缆信号给电机,使其与电网断开连接。
同时,PLC控制器还会通过接口与风机控制系统通信,向其发送解缆指令。
风机控制系统接收到解缆指令后,会停止向电网输出电能,实现风机的解缆控制。
最后,为了保证风机解缆的可靠性,本设计还设计了解缆故障检测与报警系统。
当风机解缆过程中出现异常情况,如解缆失败、电机异常等,PLC控制器会及时检测并发出报警信号。
同时,PLC控制器还会自动记录解缆异常的具体情况,并将其显示在监控界面上,方便运维人员的排查与处理。
综上所述,本设计基于PLC控制技术,实现了风机偏航系统解缆控制方案。
通过对风机偏航角度的检测与控制,以及风机解缆的实时控制与故障检测,该方案能够有效地保护风机,在异常情况下提高风机的安全性和可靠性。
同时,该方案还具有简洁、可靠、易于维护等优点,在风电场中具有广泛的应用前景。
风力机偏航系统课程设计一、课程目标知识目标:1. 理解风力机偏航系统的工作原理,掌握其主要组成部分及功能;2. 掌握风力机偏航系统的控制策略,了解不同风速下偏航系统的运行模式;3. 了解风力机偏航系统在我国风力发电行业中的应用及发展前景。
技能目标:1. 能够分析风力机偏航系统在实际运行中可能遇到的问题,并提出解决方案;2. 能够运用所学知识,设计简单的风力机偏航系统控制策略,并进行仿真分析;3. 能够通过查阅资料,了解风力机偏航系统的最新技术动态和发展趋势。
情感态度价值观目标:1. 培养学生对新能源技术的兴趣,增强环保意识和可持续发展观念;2. 培养学生团队协作精神,提高沟通与交流能力;3. 增强学生对我国风力发电行业的认同感,激发为国家和民族事业做贡献的意愿。
课程性质:本课程为风力发电技术专业课程,结合学生年级特点和教学要求,注重理论与实践相结合,培养学生的实际操作能力和创新能力。
学生特点:学生已具备一定的风力发电基础知识和工程实践能力,具有较强的求知欲和自主学习能力。
教学要求:通过本课程的学习,使学生能够掌握风力机偏航系统的相关知识,提高学生解决实际问题的能力,培养具备创新精神和实践能力的高素质技术技能人才。
在此基础上,将课程目标分解为具体的学习成果,以便后续的教学设计和评估。
二、教学内容1. 风力机偏航系统概述- 了解风力机偏航系统的基本概念、作用及发展历程;- 熟悉教材第3章第2节内容,掌握偏航系统的基本构成及工作原理。
2. 风力机偏航系统的控制策略- 学习教材第4章第1节,掌握偏航系统的控制目标、控制策略及运行模式;- 分析不同风速下偏航系统的运行状态,了解其调节方法。
3. 风力机偏航系统在实际应用中的问题及解决方案- 结合教材第5章,探讨偏航系统在实际运行过程中可能遇到的问题,如偏航不准确、偏航速度过快等;- 分析并提出相应的解决方案,提高风力机偏航系统的稳定性和可靠性。
4. 风力机偏航系统设计及仿真分析- 学习教材第6章,掌握偏航系统设计的基本方法,如系统建模、参数优化等;- 利用相关软件进行偏航系统的仿真分析,验证所设计控制策略的有效性。
第一章绪论1.1课题的研究背景1. 1. 1 当代能源危机问题能源是人类文明发展的“血液”,同时也是一个国家发展的重要前提。
自从200年以前工业革命开始到现在,全球的能源消耗就急速增长,能源已经成为制约经济发展的最大障碍。
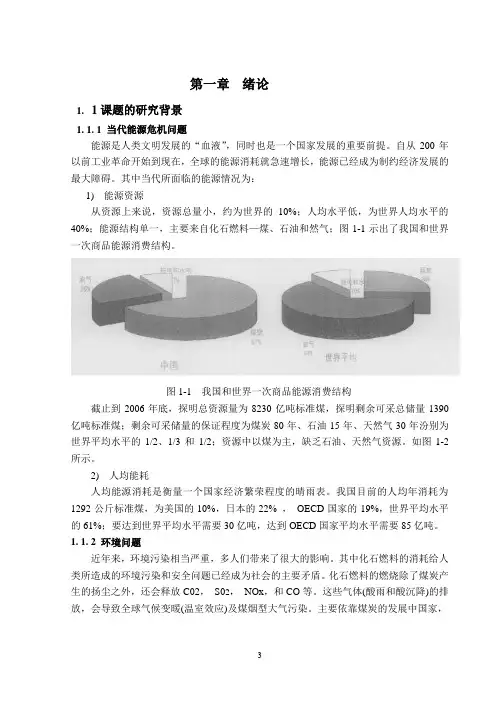
其中当代所面临的能源情况为:1)能源资源从资源上来说,资源总量小,约为世界的10%;人均水平低,为世界人均水平的40%;能源结构单一,主要来自化石燃料—煤、石油和然气;图1-1示出了我国和世界一次商品能源消费结构。
图1-1 我国和世界一次商品能源消费结构截止到2006年底,探明总资源量为8230亿吨标准煤,探明剩余可采总储量1390亿吨标准煤;剩余可采储量的保证程度为煤炭80年、石油15年、天然气30年汾别为世界平均水平的1/2、1/3和1/2;资源中以煤为主,缺乏石油、天然气资源。
如图1-2所示。
2) 人均能耗人均能源消耗是衡量一个国家经济繁荣程度的晴雨表。
我国目前的人均年消耗为1292公斤标准煤,为美国的10%,日本的22% ,OECD国家的19%,世界平均水平的61%;要达到世界平均水平需要30亿吨,达到OECD国家平均水平需要85亿吨。
1. 1. 2 环境问题近年来,环境污染相当严重,多人们带来了很大的影响。
其中化石燃料的消耗给人类所造成的环境污染和安全问题已经成为社会的主要矛盾。
化石燃料的燃烧除了煤炭产生的扬尘之外,还会释放C02,S02,NOx,和CO等。
这些气体(酸雨和酸沉降)的排放,会导致全球气候变暖(温室效应)及煤烟型大气污染。
主要依靠煤炭的发展中国家,如中国、印度等的空气污染已相当严重,按目前污染排放推算,再过100年,人类将无法在地球生存。
1. 1. 3 新能源的开发与应用面对能源的短缺和环境污染所产生的一系列问题,我们必须大力开发利用可再生能源资源。
其中风能是世界上最具大规模应用潜力的可再生能源。
我国蕴含着巨大的风能资源,特别是东南沿海及附近岛屿、内蒙古和河西走廊、东北、西北、华北和青藏高原等部分地区,每年风速在3m/s以上的时间近4000小时左右,一些地区年平均风速可达6~7m/s以上,具有很高的开发利用价值。
酒泉职业技术学院毕业设计(论文)2010 级风能与动力技术专业题目: 双馈异步风力发电机组齿轮箱的故障分析与处理毕业时间:二O 一三年六月学生姓名:***指导教师:**班级:10 风电(2)班2012 年12月20日酒泉职业技术学院2013 届各专业毕业论文(设计)成绩评定表说明:1、以上各栏必须按要求逐项填写.。
2、此表附于毕业论文(设计)封面之后。
目录摘要 (1)一、概述 (1)(一)风力发电机组齿轮箱发展现状 (1)(二)国内外风力发电发展概况....................... 错误!未定义书签。
二、风力发电机组齿轮箱的介绍 (3)(一)风力发电机组齿轮箱的结构及作用 (3)(二)风力发电机组的结构及齿轮箱的布置形式 (4)三、风力发电齿轮箱的故障分析与处理 (5)(一)齿轮箱常见故障故障分析及处理方式 (5)1.断齿 ......................................... 错误!未定义书签。
2.点蚀 ......................................... 错误!未定义书签。
3.齿面胶合 (5)4.齿根疲劳裂纹 (6)5.齿面接触疲劳 (6)6.轴承损坏 (6)7.断轴 (6)(二)风力发电机组齿轮箱的维护 (8)1.腐蚀状况和泄漏情况检查 (8)2.维护安全防护 (8)3.齿轮箱检外部检查 (8)4.油液检查 (8)5.检查齿轮 (8)6.清洁空气滤清帽 (8)7.检查齿轮箱的弹性支撑 (8)8.润滑冷却循环系统检查 (8)四、发电的发展存在问题和主要趋势风力 (9)(一)我国风电齿轮箱设计生产存在问题 (9)(二)风电发展的主要趋势 (9)1.单机容量增大 (9)2.结构形式多样 (9)3.海上风电场前景广阔 (10)五、总结 (10)参考文献: (11)致谢 (12)双馈异步风力发电机组齿轮箱的故障分析与处理摘要: 风电场业的飞速发展促成了风电装备制造业的繁荣,风电齿轮箱作为机组的核心部件,倍受国内外风电行业和研究机构的关注。

阐述风力发电偏航控制系统设计1 偏航系统构成偏航系统能对风向变化进行识别,并进行自动对风;偏航电机采用软启动方式并装有减速器,减少启动电流的冲击,使启动过程平稳,延长电机使用寿命;此外还有扭纜保护装置、可靠的执行电路、叶轮锁定装置,来提高风机的可靠性。
当系统检测到风速大于切出风速时,偏航系统执行90°侧风操作,从而起到保护风轮的作用。
偏航过程中采用异步电机作为执行机构,当对风结束时进行机械抱闸使其停止偏航。
偏航系统控制结构图如下图1所示:2 偏航方向判别策略如图2,风向角α的范围是-180°~180°,定义正北方向为风向角0°方向。
风向从正北方向顺时针变化时,风向角正向增加,正南方为180°方向;风向从正北方向逆时针变化时,风向角反向增加,正南方为-180°方向。
如图3,偏航角γ的范围是-1800°~1800°,定义正北方为偏航角0°方向。
机舱顺时针旋转时,偏航角正向增加(右偏航);机舱逆时针旋转时,偏航角反向增加(左偏航)。
把风向角与偏航角的差值(记作θ,即θ=α-γ,取θ的范围为-1260°~1260°),在对风控制过程中,要选择合理路径,即需要机舱以最短路径跟随风向变化,可遵循以下两条规则:(1)机舱顺时针偏转角度与逆时针偏转角度存在关系式:顺时针偏转角度=360°-逆时针偏转角度即机舱可按顺时针或逆时针两种方向偏转跟踪风向实现对风的目的,本设计中为了缩短对风时间,提高效率,选择偏转角度小的方向(顺时针方向/逆时针方向)进行偏转。
(2)θ与θ±360°×n(n=0,1,2,3)机头的偏转路径一样。
由以上分析给出偏航方向判别表,见表1,其中:n为扭缆的圈数,可以通过计数传感器进行测量。
当检测到机头方向与风向角差值超过设定角度(5°),风力发电机组将执行偏航对风,当此角度达到设定角度(1°)之内时,风力发电机组停止偏航。
引言风力发电机组的偏航系统又称为对风装置,偏航系统的功能在于风速矢量的方向改变时,其动作让风机能够快速平稳地对准风向,可以使风轮获得最大的风能。
在大多数风力发电系统中经常使用这种来调整风轮并使其对准风向[1]。
偏航系统主要包括:偏航执行电机、刹车系统、风向标传感器、驱动系统、轴承、控制和润滑系统。
在本文中主要论述偏航执行电机的设计和性能分析,并以93-2500风力发电偏航控制系统中的YPH112-6型偏航执行电机为具体实例进行分析设计。
1偏航执行电机的尺寸及定转子槽数确定在本文中以93-2500风力发电偏航控制系统中的YPH112-6型偏航执行电机为标准进行设计其技术参数如下表所示:2018-7-22湖南省科技厅重点研发计划项目(项目编号:20LBGK2018);湖南省重点实验室开放研究基金资助(项目编号:FLEDL702J )许志伟(1978-),男,湖南长沙人,湖南省风力发电机组及控制湖南省重点实验室副教授、博士、硕士生导师,研究方向:特种电机及其控制。
[收稿日期][基金项目][作者简介]许志伟,刘志华,郑亮(湖南工程学院风力发电机组及控制湖南省重点实验室,湖南湘潭,41104)风力发电系统偏航执行电机设计[摘要]对风力发电系统中的偏航执行电机设计方法进行了研究,对电机的定转子槽数配合,槽形设计进行了优化。
以YPH112-6型偏航执行电机为例进行有限元仿真建模,用有限元得出的数据与RMxprt 磁路计算数据进行对比。
来验证电机设计是否符合电机技术参数,证明了电机的性能能满足工程需要。
[关键词]偏航执行电机;齿槽配合;有限元仿真;横向对比[中图分类号]TM614[文献标识码]A [文章编号]1671-5004(2018)05-0001-04On the Design of Yaw Actuator in Wind Power GenerationSystemXu Zhi-wei,Liu Zhi-hua,Zheng Liang(Hunan Provincial Key Laboratory of Wind Generation and Its control,Hunan Institute of Engineering,Xiangtan 41104,Hunan )[Abstract ]This paper studies the design method of yaw actuator in wind power generation system,and optimizes thedesign of fixed rotor slot number and groove shape.Taking yph112-6yaw actuator as an example,finite element simulation modeling is carried out.To verify whether the motor design conforms to the technical parameters of the motor,this study compares the data from finite element with the data from RMxprt magnetic circuit,and proves that the performance of the motor can meet the engineering needs.[Key words ]yaw motor;groove fit;finite element simulation;horizontal contrast表1电机技术参数项目 额定功率(KW )额定转速(r/min ) 额定电压 (V ) 额定频率 (Hz )额定电流 (A )堵转转矩 (倍) 制动电压 (V ) 绝缘等级参数3920AC4005072.5DC24F11.1定转槽数确定电机定子槽数的确定应该保证电机有良好的电气性能并且尽可能降低制造成本,电机的定子槽数越大,电机的磁动势波形越接近正弦波,谐波磁场与谐波所造成的电机损耗就越少。
新疆大学科学技术学院College of science &technology Xinjiang University学生毕业论文(设计) 题目:风力发电机组偏航控制系统设计新疆大学科学技术学院学生毕业论文(设计)任务书学生姓名刘海龙学号 20092450037专业电气工程及其自动化班级电气09-1论文(设计)题目风力发电机组偏航控制系统设计论文(设计)来源教师科研要求完成的内容1.查阅相关资料,掌握风机发电机组的基本结构;2.查阅相关资料,了解风力发电机组的偏航系统硬件结构及功能;3.查阅相关资料,掌握偏航控制系统的几种流程;4.掌握一种高级编程语言(如visual basic 6.0);5.编制对风偏航的控制程序;6.完成毕业设计说明书一篇。
发题日期:2013年1月9日完成日期:2013年5月30日指导教师签名摘要长能源、环境是当今人类生存和发展所要解决的紧迫问题。
风力发电作为一种可持续发展的新能源,不仅可以节约常规能源,而且减少环境污染,具有较好的经济效益和社会效益,越来越受到各国的重视。
由于风能具有能量密度低、随机性和不稳定性等特点,风力发电机组是复杂多变量非线性不确定系统,因此,控制技术是机组安全高效运行的关键。
偏航控制系统成为水平轴风力发电机组控制系统的重要组成部分。
风力发电机组的偏航控制系统,主要分为两大类:被动迎风偏航系统和主动迎风系统。
前者多用于小型的独立风力发电系统,由尾舵控制,风向改变时,被动对风。
后者则多用大型并网型风力发电系统,由位于下风向的风向标发出的信号进行主动对风控制。
本文设计是大型风力发电机组根据风速仪、风向标等传感器数据,对风、制动、开闸并确定起动,达到同步转速一段时间后,进行并网操作,开始发电。
关键词:风力发电机;风向标;偏航控制系统ABSTRACTEnergy, the environment is the development of human survival and the urgency of the problem to be solved. Wind power as a new source of energy for sustainable development, not only can save conventional energy sources, and reducing environmental pollution, good economic and social benefits, ever-increasing importance attached.As the wind with a low energy density, random and non-stability characteristics of wind turbine is complex and ever-changing amount of nonlinear uncertain systems, therefore, the control unit technology is the key to safe and efficient operation. Yaw control system as a horizontal axis wind turbine control system for an important part of. The wind turbine yaw control system is divided into two categories: passive and active yaw wind wind systems. In this paper, the design is based on large-scale wind turbine anemometer, wind vane, such as sensor data, on the wind, braking, and determine the starting gate opening to synchronous speed for some time, and network operations to begin power generation.Key words: Wind turbine ;Wind vane;Yaw control system目录1 绪论 (1)1.1课题的背景和意义 (1)1.2世界风力发电的发电 (2)1.3国内风力发电的发展 (2)1.4本课题主要任务 (3)2 风力发电机组系统构成及功能简介概述 (4)2.1风力发电机的分类 (4)2.2现代风机 (4)2.3风力发电机系统组成部分简介 (5)2.3.1风力机桨叶系统 (5)2.3.2风力机齿轮箱系统 (6)2.3.3发电机系统 (6)2.3.4偏航系统 (7)2.3.5解缆装置 (7)2.3.6刹车系统 (8)2.3.7塔架 (8)2.3.8控制系统 (8)3 偏航控制系统组成和原理 (10)3.1偏航系统的组成 (10)3.2偏航控制机构 (10)3.2.1风向传感器 (10)3.2.2偏航控制器 (12)3.2.3解缆传感器 (12)3.3偏航驱动机构 (12)3.3.1偏航轴承 (13)3.3.2偏航驱动装置 (14)3.3.3偏航制动器 (15)3.4偏航控制系统的功能及原理 (16)3.4.1偏航控制系统的功能 (16)3.4.2偏航控制原理 (17)4 偏航控制系统设计及结果分析 (19)4.1 Vb结构和功能 (19)4.1.1 Visual basic6.0简介: (19)4.1.2 Visual Basic6.0的开发环境 (19)4.1.3 VB主要功能和特点: (20)4.2偏航过程 (20)4.3控制软件流程图 (21)4.4 Vb编程设计 (25)4.5结论与分析 (26)结束语 (28)致谢 (29)参考文献 (30)1绪论1.1课题的背景和意义随着人类社会发展的历史与能源的开发和利用水平密切相关,每一次新型能源的开发都使人类经济的发展产生一次飞跃。
本科毕业设计说明书(题目:风力机偏航系统控制器设计-软件毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
1.5MW风电机组偏航系统的三维建模指导老师:段振云修改意见:1、内容上基本合格,雷同之处较少,2、论文格式修改参照校网的毕业论文最终格式3、图纸工作量为CAD偏航系统装配图,机舱底盘前部图,偏航系统三维立体图,机舱底盘三维立体图四张零号4、写好中英文摘要,尽量使用专业词汇。
第一章引言1.1风能利用的发展风是地球上的一种自然现象,它是由太阳辐射热引起的。
风能是太阳能的一种转换形式,是一种重要的自然能源。
太阳照射到地球表面,地球表面各处受热不同,产生温差,从而引起大气的对流运动形成风。
据估计到达地球的太阳能中虽然只有大约2%转化为风能,但其总量仍是十分可观的。
地球上可利用的风能比可开发利用的水能总量还要大10倍。
当今世界各国对环保问题都十分关注,风能作为一种取之不尽、用之不竭的清洁、可再生绿色能源,越来越受到人们的注意。
随着工业的发展,地球上不可再生能源消耗加剧,其产生的废气、废水、废渣等造成了环境污染、生态失衡。
因为风力发电没有燃料问题,也不会产生辐射和空气污染,所以风力发电正在世界上形成一股热潮。
能源,环境是当今人类生存和发展所要解决的紧迫问题。
常规能源以煤,石油,天然气为主,它不仅资源有限,而且造成了严重的大气污染。
因此,对可再生能源的开发利用,他别是对风能的开发利用,已经受到世界各国的高度重视。
据专家们估计,地球上所接受到的太阳辐射能大约有2%转换成风能,装机容量可达10TW,每年可发电力13PW.h。
近二十年,发达国家在锋利发电技术利于已经能够取得巨大的成就。
并网运行的风力发电机组单机容量从最初的数十千瓦级已发展到兆瓦级;控制方式从简单单一的定浆距失速控制想全浆叶变距和变速恒频发展,预计在最近的几年内将推出智能型风力发电机组;运行可靠性从20世纪80年代初底50%提高到98%以上,并且在风电场运行的风力发电机组全部可以实现集中控制和远程控制。
从今后的发展趋势来看,风电场将从内陆移到海上,其发展空间将更加广阔。
LANZHOU UNIVERSITY OF TECHNOLOGY毕业设计题目大型风力发电机组偏航控制系统设计—程序部分学生姓名XXXXXXX学号XXXXXXXX专业班级电气六班指导教师XXXXXXXX学院电信学院答辩日期XXXX年X月ABB--PLC程序PROGRAM PLC_PRGVARSTART AT%MX0.4.2:BOOL;STOP AT%MX0.4.3:BOOL;Auto AT%MX0.4.4:BOOL;Hand AT%MX0.4.5:BOOL;Hand_Left AT%MX0.4.0:BOOL;Hand_Right AT%MX0.4.1:BOOL;Wind_Speed AT%IW2:INT;Wind_Dire AT%IW3:INT;Speed_Alarm AT%MX0.4.7:BOOL;Tempture AT%MW0.112:INT;Niulan AT%MD0.115:REAL;Tempture_Alarm AT%MX0.5.1:BOOL;Niulan_Alarm AT%MX0.5.2:BOOL;Start_Hl AT%MX0.5.3:BOOL;Stop_Hl AT%MX0.5.4:BOOL;Hand_Hl AT%MX0.5.6:BOOL;Auto_Hl AT%MX0.5.5:BOOL;L1_OUT AT%MD0.100:REAL;L2_OUT AT%MD0.109:REAL;L3_OUT AT%MD0.107:REAL;pjds AT%MW0.125:INT;L4_OUT:REAL;L5_OUT:REAL;SPEED:INT;DIRE:INT;SPEED1:REAL;Tempture_IN:INT;Niulan_IN:INT;phjd:REAL;PID1:PID;Tempture_Hl:BOOL;Niulan_Hl:BOOL;Speed_Hl:BOOL; PBLINK:BLINK; PBLINK1:BLINK; TIMEE:BOOL;TEMP1:INT;TP2:TP;TP1:TP;Timer1_EN:BOOL;Timer2_EN:BOOL;Bool1:BOOL;Bool2:BOOL;Bool3:BOOL;Bool4:BOOL;Bool5:BOOL;Bool6:BOOL;Bool7:BOOL;Bool8:BOOL;Bool9:BOOL;Bool10:BOOL;Bool11:BOOL;Bool12:BOOL;bool13:BOOL;R_TRIG1:R_TRIG;R_TRIG2:R_TRIG;R_TRIG3:R_TRIG;TON1:TON;TON2:TON;LIN_TRAFO3:LIN_TRAFO; LIN_TRAFO1:LIN_TRAFO; LIN_TRAFO2:LIN_TRAFO; LIN_TRAFO4:LIN_TRAFO; LIN_TRAFO5:LIN_TRAFO; Var1:TIME;Var2:TIME;TEMP2:INT;Driver_Speed:BOOL;Driver2_Left:BOOL;Driver2_Right:BOOL;Driver1_EN:BOOL;Driver2_EN:BOOL;ONB_IO_CNT01:ONB_IO_CNT; ONB_IO_CNT1:ONB_IO_CNT; v1:DWORD;v2:DWORD;v7:DINT;v8AT%MD0.102:REAL;v4:DWORD;v3:DWORD;v5:DWORD;v6:DWORD;a:BOOL;b:BOOL;c:BOOL;d:BOOL;e:BOOL;f:BOOL;g:BOOL;h:BOOL;J:BOOL;k:BOOL;L:BOOL;m:BOOL;n:BOOL;x:BOOL;y:BOOL;z:BOOL;v01:DWORD;v02:DWORD;v03:DWORD;v04:DWORD;v05:DWORD;v06:DWORD;v07:DINT;v08:REAL;END_VARVAR_GLOBAL(*Modbus通信协议*)VVVFMCW:ARRAY[0..9]OF VVVFMCWSTRUCT;VVVFMSW:ARRAY[0..9]OF VVVFMSWSTRUCT;TempDword:DWORD;RecvOrSend:BOOL;MotorAddrIndex:ARRAY[0..3]OF BYTE:=1,2;(*变频器Modbus地址序列*) MotorMaxNum:INT:=2;(*变频器最大数目-有几台就是几*) MotorCycleNo:INT;(*变频器当前巡检号*)ComStaNum:UINT;(*发送次数总计*)MotorComErr:ARRAY[0..9]OF INT;(*通讯错误计数*)VVVFCOM:COM_MOD_MAST:=(COM:=1,TIMEOUT:=500);(*Modbus配置*) ComModData:ARRAY[0..9]OFWORD;(*发送接收的数据*)DRIVERAUTO AT%MX0.6.5:BOOL;DRIVER1_xOnlineOK AT%MX0.6.0:BOOL;(*在线*)DRIVER1_DI_START AT%MX0.6.1:BOOL;DRIVER1_DI_RESET AT%MX0.6.2:BOOL;DRIVER1_DO_TRIPPED AT%MX0.6.3:BOOL;(*故障*)DRIVER1_DI_STOP AT%MX0.6.4:BOOL;DRIVER2_xOnlineOK AT%MX0.7.0:BOOL;DRIVER2_DI_START AT%MX0.7.1:BOOL;DRIVER2_DI_RESET AT%MX0.7.2:BOOL;DRIVER2_DO_TRIPPED AT%MX0.7.3:BOOL;DRIVER2_DI_STOP AT%MX0.7.4:BOOL;DRIVER1_SETSPEED AT%MD0.101:REAL;(*设定转速*)DRIVER1_ACTSPEED AT%MD0.102:REAL;(*实际转速*)DRIVER2_SETSPEED AT%MD0.103:REAL;(*设定转速*)DRIVER2_ACTSPEED AT%MD0.104:REAL;(*实际转速*)END_VARTP1(IN:=Timer1_EN,PT:=T#10min,Q=>Bool1,ET=>Var1);(*定时器1*)TP2(IN:=Timer2_EN,PT:=T#3s,Q=>Bool2,ET=>Var2);(*定时器2*)LIN_TRAFO1(IN:=Wind_Speed,IN_MIN:=0,IN_MAX:=27648,OUT_MIN:=0,OUT_MA X:=35,OUT=>L1_OUT);(*风速模拟量线性变换*)SPEED:=REAL_TO_INT(L1_OUT);(*数据类型变换*)LIN_TRAFO2(IN:=Wind_Dire,IN_MIN:=5320,IN_MAX:=22307,OUT_MIN:=0,OUT_M AX:=360,OUT=>L2_OUT);(*风向角偏差模拟量线性变换*)DIRE:=REAL_TO_INT(L2_OUT);LIN_TRAFO3(IN:=Tempture,IN_MIN:=0,IN_MAX:=27648,OUT_MIN:=-20,OUT_MAX: =60,OUT=>L3_OUT);(*温度模拟量线性变换*)Tempture_IN:=REAL_TO_INT(L3_OUT);LIN_TRAFO4(IN:=Niulan,IN_MIN:=0,IN_MAX:=27648,OUT_MIN:=-700,OUT_MAX:=7 00,OUT=>L4_OUT);(*扭缆模拟量线性变换*)Niulan_IN:=REAL_TO_INT(L4_OUT);LIN_TRAFO5(IN:=L2_OUT,IN_MIN:=0,IN_MAX:=360,OUT_MIN:=0,OUT_MAX:=65 535,OUT=>L5_OUT);pjds:=REAL_TO_INT(L5_OUT);(*高速计数功能块,用于测量电机转速,及偏航电机旋转角度*)ONB_IO_CNT1(EN:=TRUE,CHANNEL:=0,EN_VISU:=FALSE,EN1:=a,UD1:=b,EN_OUT1:=c,SET1:=d,START1:=v1,END1:=v2,EN2:=e,UD2:=f,EN_OUT2:=g,SET2:=h,START2:=v5,END2:=v6,ACT1=>v3,ACT2= >v4);v7:=DWORD_TO_DINT(v3);(*电机0.5s输出的脉冲数为v3,经数据变换后可以识别正反转*)v8:=DINT_TO_REAL(v7*2*60/360);(*1分钟脉冲数/电机旋转一周输出的脉冲=电机转速*)TON1(IN:=START,PT:=T#500ms);TON2(IN:=bool13,PT:=T#5000ms);ONB_IO_CNT01(EN:=TRUE,CHANNEL:=0,EN_VISU:=FALSE,EN1:=J,UD1:=k,EN_OUT1:=L,SET1:=m,START1:=v01,END1:=v02,EN2:=n,UD2:=x,EN_OUT2:=y,SET2:=z,START2:=v05,END2:=v06,ACT1=>v03,AC T2=>v04);v07:=DWORD_TO_DINT(v03);phjd:=DINT_TO_REAL(v07);PBLINK(ENABLE:=Bool10,TIMELOW:=T#500MS,TIMEHIGH:=T#500MS);(*周期1s的方波*)R_TRIG1(CLK:=PBLINK.OUT);(*上升沿触发*)R_TRIG2(CLK:=PBLINK1.OUT);R_TRIG3(CLK:=Driver1_EN);PBLINK1(ENABLE:=a,TIMELOW:=T#500MS,TIMEHIGH:=T#500MS);PID1(ACTUAL:=SPEED,SET_POINT:=10.5,KP:=0.5,TN:=100,TV:=10,Y_MANUAL:=, Y_OFFSET:=0.05,Y_MIN:=10.45,Y_MAX:=10.55,MANUAL:=FALSE,RESET:=NOT(S TART),Y=>SPEED1);(*Y=KP x(D+1/TN?edt+TV dD/DT)+Y_OFFSET*)IF d THENd:=FALSE;a:=TRUE;END_IF;(*用于对高速计数器清零*)IF R_TRIG2.Q THENa:=FALSE;(*用高速计数器计数0.5s*)bool13:=TRUE;END_IF;IF bool13THENIF TON2.Q THEN(*5s后重新开始测速*)d:=TRUE;bool13:=FALSE;END_IF;END_IF;(*温度判断*)IF START AND(Tempture_IN<=-15OR tempture_IN>=55)THENDriver_Speed:=FALSE;(*若温度temperature<=-15或者>=55,则*)Hand_Hl:=FALSE;Auto_Hl:=FALSE;Bool7:=TRUE;Tempture_Alarm:=TRUE;(*温度报警灯亮*)ELSEBool7:=FALSE;Tempture_Alarm:=FALSE;(*否则,温度报警灯不亮*)Tempture_Hl:=TRUE;(*温度正常灯亮*)END_IF;IF START THEN(*开始按下*)Stop_Hl:=FALSE;(*停止灯灭*)Start_Hl:=TRUE;(*开始灯亮*)ELSEStop_Hl:=TRUE;(*否则停止灯亮*)Start_Hl:=FALSE;END_IF;(*扭缆判断*)IF START THENIF Niulan_IN<=300AND Niulan_IN>=-300THENBool14:=TRUE;(*若扭缆角度在-300~300时,正常偏航*)END_IF;IF(Niulan_IN<=650ANDNiulan_IN>300)OR(Niulan_IN<-300AND Niulan_IN>=-650) THENBool14:=FALSE;(*若扭缆角度在-300~-650时,或者*)END_IF;(*扭缆角度在300~650时,强制偏航*)IF NOT(bool14)THENIF Niulan_IN<0THENDriver2_Left:=FALSE;(*若扭缆角度在-650~-300时,强制偏航电机右转*)Driver2_Right:=TRUE;ELSEDriver2_Left:=TRUE;(*若扭缆角度在300~650时,强制偏航电机左转*)Driver2_Right:=FALSE;END_IF;END_IF;IF Niulan_IN>650OR Niulan_IN<-650THENDriver_Speed:=FALSE;Niulan_Hl:=FALSE;(*若扭缆角度在-650~650之外时,扭缆报警,偏航电机停止工作*)Bool8:=FALSE;(*等待人工解缆*)Niulan_Alarm:=TRUE;Driver2_EN:=FALSE;ELSEBool8:=TRUE;(*若扭缆角度在-650~650之内时,允许偏航电机工作*)Niulan_Alarm:=FALSE;Niulan_Hl:=TRUE;Driver2_EN:=TRUE;END_IF;END_IF;IF NOT(Auto)AND Hand AND NOT(Bool7)AND NOT(Bool8)THENDriver_Speed:=FALSE;(*手动偏航时*)Hand_Hl:=TRUE;(*手动指示灯亮*)IF Hand_Left THEN(*手动左转按下时*)Driver2_Left:=TRUE;(*偏航电机反转对风*)ELSEDriver2_Left:=FALSE;END_IF;IF Hand_Right THEN(*手动右转按下时*)Driver2_Right:=TRUE;(*偏航电机正转对风*)ELSEDriver2_Right:=FALSE;END_IF;END_IF;IF Bool3THENTEMP1:=TEMP1+1;IF TEMP1>25THENTEMP1:=0;Bool4:=TRUE;TIMEE:=FALSE;END_IF;END_IF;IF NOT(bool6)OR NOT(bool9)THEN(*温度和扭缆均正常*)IF START AND NOT(Hand)AND NOT(Bool7)AND NOT(Bool8)THEN IF Auto THEN(*启动后,自动按钮按下时,电机总开关打开为TRUE*) Driver_Speed:=TRUE;Hand_Hl:=FALSE;Auto_Hl:=TRUE;(*自动指示灯亮*)ELSEDriver_Speed:=FALSE;END_IF;END_IF;END_IF;(*风速判断*)IF Driver_Speed THENIF(SPEED>3AND SPEED<25)THENDriver1_EN:=TRUE;(*风速大于3米每秒时,切入风机*)Speed_Hl:=TRUE;(*风速正常指示灯亮*)Speed_Alarm:=FALSE;Bool6:=FALSE;Bool9:=FALSE;END_IF;IF(SPEED>=25AND SPEED<30)THENTimer1_EN:=TRUE;(*风速大于25米每秒时,启动定时器1*)Driver1_EN:=TRUE;Bool10:=TRUE;IF TP1.ET>=T#5s THEN(*到达定时时间后*)Timer1_EN:=FALSE;(*关闭定时器1*)Driver1_EN:=FALSE;(*切出风机*)Bool6:=TRUE;;END_IF;IF R_TRIG1.Q THENSpeed_Alarm:=TRUE;(*风速大于25米每秒时,风速报警灯闪烁报警*)ELSESpeed_Alarm:=FALSE;END_IF;ELSEBool10:=FALSE;Timer1_EN:=FALSE;END_IF;IF SPEED>=30THENTimer2_EN:=TRUE;(*风速大于30米每秒时,启动定时器2*)Speed_Alarm:=TRUE;(*风速报警灯报警*)Driver1_EN:=TRUE;IF TP2.ET>=T#10s THEN(*到达定时时间后*)Timer2_EN:=FALSE;(*关闭定时器2*)Driver1_EN:=FALSE;(*切出风机*)Bool9:=TRUE;END_IF;ELSETimer2_EN:=FALSE;END_IF;IF SPEED>=35OR SPEED<3THENBool11:=TRUE;(*风速大于30m/s,或者风速小于3m/s时,关变频器及电机*) ELSEBool11:=FALSE;(*当风速满足条件时,继续执行程序*)END_IF;(*风向角偏差判断*)IF DIRE>=5AND DIRE<=355THENDriver2_EN:=TRUE;(*如果风向角偏差在(5-355)°内时,电机旋转使能信号为TRUE*)TIMEE:=TRUE;IF DIRE<=15THEN(*如果风向角偏差在(5-15)°内时*)Driver2_Left:=TRUE;(*偏航电机反转*)Bool4:=TRUE;IF NOT(TIMEE)THEN(*到达规定时间后(此处采用数数字方法计时t1),*)Driver2_Left:=FALSE;(*偏航电机停止反转*)END_IF;END_IF;IF DIRE>=15AND DIRE<=180THEN(*如果风向角偏差在(15-180)°内时*) Driver2_Left:=TRUE;(*偏航电机反转*)Bool5:=TRUE;IF NOT(TIMEE)THEN(*到达规定时间后(计时t2,且t2>t1)*)Driver2_Left:=FALSE;(*偏航电机停止反转*)END_IF;END_IF;IF DIRE>=180AND DIRE<=345THEN(*如果风向角偏差在(180-345)°内时*) Driver2_Right:=TRUE;(*偏航电机正转*)Bool5:=TRUE;IF NOT(TIMEE)THEN(*到达规定时间后(计时t2)*)Driver2_Right:=FALSE;(*偏航电机停止正转*)END_IF;END_IF;IF DIRE>=345AND DIRE<=355THEN(*如果风向角偏差在(345-355)°内时*) Driver2_Right:=TRUE;(*偏航电机正转*)Bool4:=TRUE;IF NOT(TIMEE)THEN(*到达规定时间后(计时t1)*)Driver2_Right:=FALSE;(*偏航电机停止正转*)END_IF;END_IF;ELSEDriver2_EN:=FALSE;(*否则,偏差角度在允许范围内,偏航电机不做处理*)TIMEE:=FALSE;Driver2_Left:=FALSE;Driver2_Right:=FALSE;VVVFMCW[1].OFF1_CON:=FALSE;END_IF;END_IF;IF bool6OR bool9OR Bool11THEN(*如果风速>=25m/s,持续时间大于10min,或者*) v8:=0;Driver1_EN:=FALSE;(*风速>=30m/s,持续时间大于3s*)Timer1_EN:=FALSE;(*失速保护,关风机*)Timer2_EN:=FALSE;Driver2_Left:=FALSE;(*关偏航电机*)Driver2_Right:=FALSE;VVVFMCW[0].OFF1_CON:=FALSE;(*关变频器*)VVVFMCW[1].OFF1_CON:=FALSE;END_IF;IF TIMEE THENIF Bool4THENTEMP1:=TEMP1+1;(*数数字程序段1—t1*)IF TEMP1>25THENTEMP1:=0;Bool4:=TRUE;TIMEE:=FALSE;END_IF;END_IF;IF Bool5THENTEMP2:=TEMP2+1;(*数数字程序段2—t2*)IF TEMP2>50THENTEMP2:=0;Bool5:=TRUE;TIMEE:=FALSE;END_IF;END_IF;END_IF;IF START AND NOT(Bool7)AND NOT(Bool8)THENDRIVER1_DI_START:=FALSE;(*启动后*)VVVFMCW[0].OFF1_CON:=FALSE;DRIVER2_DI_START:=FALSE;VVVFMCW[0].OFF2_CON:=FALSE;IF DRIVER1_xOnlineOK AND Driver1_EN THENVVVFMCW[0].OFF1_CON:=TRUE;(*风机正常工作*)VVVFMCW[0].SPEED:=REAL_TO_INT(30*40);END_IF;IF DRIVER2_xOnlineOK AND Driver2_LEFT AND NOT(Driver2_RIGHT)THEN VVVFMCW[1].OFF1_CON:=TRUE;(*偏航电机反转*)J:=TRUE;VVVFMCW[1].SPEED:=REAL_TO_INT(-5*40);END_IF;IF DRIVER2_xOnlineOK AND Driver2_RIGHT AND NOT(Driver2_LEFT)THEN J:=TRUE;VVVFMCW[1].OFF1_CON:=TRUE;(*偏航电机正转*)VVVFMCW[1].SPEED:=REAL_TO_INT(5*40);END_IF;ELSEAuto_Hl:=FALSE;Driver1_EN:=FALSE;(*否则,即停止时*)Driver2_Right:=FALSE;(*关风机,关偏航电机,关变频器*)Driver2_Left:=FALSE;VVVFMCW[0].OFF1_CON:=FALSE;VVVFMCW[1].OFF1_CON:=FALSE;END_IF;IF NOT(VVVFCOM.EN)AND NOT(VVVFCOM.DONE)THEN(*使能信号,就绪信号都为FALSE时*)MotorCycleNo:=(ComStaNum/2)MOD MotorMaxNum;(*变频器当前巡检号为发送次数总计/2取余变频器的个数*)IF(ComStaNum MOD2)=0THENRecvOrSend:=FALSE;VVVFCOM.FCT:=3;(*先读*) VVVFCOM.ADDR:=3;VVVFCOM.NB:=3;ELSERecvOrSend:=TRUE;VVVFCOM.FCT:=16;(*后写*) VVVFCOM.ADDR:=0;VVVFCOM.NB:=2;MCW();END_IF;VVVFCOM.EN:=TRUE;VVVFCOM.DATA:=ADR(ComModData);VVVFCOM.SLAVE:=MotorAddrIndex[MotorCycleNo];ComStaNum:=ComStaNum+1;END_IF;VVVFCOM();(*调用Modbus功能块*)IF VVVFCOM.DONE THEN(*就绪信息*) IF NOT(RecvOrSend)THENMSW();END_IF;VVVFCOM.EN:=FALSE;END_IF;DRIVER1_ACTSPEED:=VVVFMSW[0].SET_ACT/10.0;ComModData[0].0:=VVVFMCW[MotorCycleNo].OFF1_CON;ComModData[0].1:=TRUE;ComModData[0].2:=TRUE;ComModData[0].3:=TRUE;ComModData[0].4:=TRUE;ComModData[0].5:=TRUE;ComModData[0].6:=TRUE;IF NOT(VVVFMSW[MotorCycleNo].FAULT)THENVVVFMCW[MotorCycleNo].RESET:=FALSE;END_IF;ComModData[0].7:=VVVFMCW[MotorCycleNo].RESET;ComModData[0].8:=VVVFMCW[MotorCycleNo].Rev00;ComModData[0].9:=VVVFMCW[MotorCycleNo].Rev01;ComModData[0].10:=TRUE;(*允许现场总线控制*)ComModData[0].11:=VVVFMCW[MotorCycleNo].EXT_CTRL_LOC;ComModData[0].12:=VVVFMCW[MotorCycleNo].Rev02; ComModData[0].13:=VVVFMCW[MotorCycleNo].Rev03; ComModData[0].14:=VVVFMCW[MotorCycleNo].Rev04; ComModData[0].15:=VVVFMCW[MotorCycleNo].Rev05; ComModData[1]:=VVVFMCW[MotorCycleNo].SPEED;IF NOT(VVVFCOM.ERR)THENVVVFMSW[MotorCycleNo].RDY_ON:=ComModData[0].0;(*ready to switch on*)VVVFMSW[MotorCycleNo].RDY_RUN:=ComModData[0].1;(*ready to operate*)VVVFMSW[MotorCycleNo].RDY_REF:=ComModData[0].2;(*可用作运行信号*)VVVFMSW[MotorCycleNo].FAULT:=ComModData[0].3;(*故障触发*) VVVFMSW[MotorCycleNo].OFF_2_STA:=ComModData[0].4;(*OFF2无效*) VVVFMSW[MotorCycleNo].OFF_3_STA:=ComModData[0].5;(*OFF3无效*) VVVFMSW[MotorCycleNo].SWC_ON_INHIB:=ComModData[0].6;(*禁止启动*)VVVFMSW[MotorCycleNo].ALARM:=ComModData[0].7;(*警告、报警*) VVVFMSW[MotorCycleNo].AT_SETPOINT:=ComModData[0].8;(*operating*) VVVFMSW[MotorCycleNo].REMOTE:=ComModData[0].9;(*传动控制地:remote*)VVVFMSW[MotorCycleNo].ABOVE_LIMIT:=ComModData[0].10;(*实际频率速度等于或大于监控范围*)VVVFMSW[MotorCycleNo].Rev00:=ComModData[0].11;VVVFMSW[MotorCycleNo].Rev01:=ComModData[0].12;VVVFMSW[MotorCycleNo].Rev02:=ComModData[0].13;VVVFMSW[MotorCycleNo].Rev03:=ComModData[0].14;VVVFMSW[MotorCycleNo].Rev04:=ComModData[0].15;VVVFMSW[MotorCycleNo].SET_ACT:=ComModData[1];VVVFMSW[MotorCycleNo].FAULT_NO:=ComModData[3];(*当前故障值号*) TempDword:=WORD_TO_DWORD(ComModData[5]);(*实际转速RPM,类型REAL*)TempDword:=ROL(TempDword,16);TempDword:=TempDword+ComModData[4];VVVFMSW[MotorCycleNo].RPM_ACT:=(DWORD_TO_REAL(TempDword))/100.0;TempDword:=WORD_TO_DWORD(ComModData[7]);(*实际电流,类型REAL*) TempDword:=ROL(TempDword,16);TempDword:=TempDword+ComModData[6];VVVFMSW[MotorCycleNo].CUR_ACT:=(DWORD_TO_REAL(TempDword))/100.0;ELSEVVVFMSW[MotorCycleNo].RDY_ON:=FALSE;VVVFMSW[MotorCycleNo].RDY_RUN:=FALSE;VVVFMSW[MotorCycleNo].RDY_REF:=FALSE;VVVFMSW[MotorCycleNo].FAULT:=FALSE;VVVFMSW[MotorCycleNo].OFF_2_STA:=FALSE;VVVFMSW[MotorCycleNo].OFF_3_STA:=FALSE;VVVFMSW[MotorCycleNo].SWC_ON_INHIB:=FALSE;VVVFMSW[MotorCycleNo].ALARM:=FALSE;VVVFMSW[MotorCycleNo].AT_SETPOINT:=FALSE;VVVFMSW[MotorCycleNo].REMOTE:=FALSE;VVVFMSW[MotorCycleNo].ABOVE_LIMIT:=FALSE;VVVFMSW[MotorCycleNo].Rev00:=FALSE;VVVFMSW[MotorCycleNo].Rev01:=FALSE;VVVFMSW[MotorCycleNo].Rev02:=FALSE;VVVFMSW[MotorCycleNo].Rev03:=FALSE;VVVFMSW[MotorCycleNo].Rev04:=FALSE;VVVFMSW[MotorCycleNo].SET_ACT:=0;VVVFMSW[MotorCycleNo].FAULT_NO:=0;VVVFMSW[MotorCycleNo].RPM_ACT:=0;VVVFMSW[MotorCycleNo].CUR_ACT:=0;MotorComErr[MotorCycleNo]:=MotorComErr[MotorCycleNo]+1; END_IF;。