基于dsPIC30F2010控制的光伏水泵
- 格式:doc
- 大小:106.50 KB
- 文档页数:4
一种润滑测试仪的设计【摘要】根据我国的现状及油田的需要,针对我们考察所发现的问题,本文提出研究设计一套能对电机转速和压力施加实现自动控制的测试仪。
一方面,可以彻底改变现有仪器只能通过调整电位器改变电机转速的缺陷,大大地提高仪器的控制精度;另一方面,实现了加压装置的自动控制,为测量钻井液的润滑质量、全面地评价各种润滑剂在钻井液中的减阻效果提供了更为精确的实验条件和科学依据。
【关键词】润滑测试仪;电机转速;单片机在钻井作业过程中,在钻井液中加入润滑剂,为了减小钻头在于地层接触时产生的摩擦力,所以必须在钻井液中加入润滑剂。
钻井液的润滑性对优质快速钻井有着十分重要的意义;钻井液润滑测试仪主要用于测量钻井液的润滑质量,为评价可能的润滑添加剂的类型和数量提供数据。
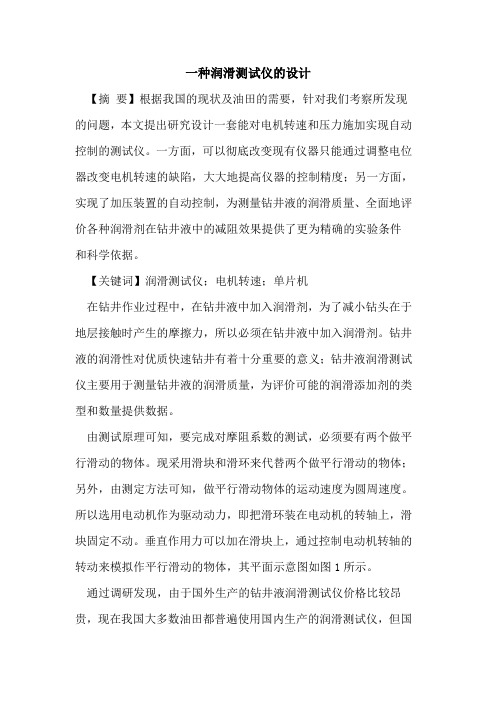
由测试原理可知,要完成对摩阻系数的测试,必须要有两个做平行滑动的物体。
现采用滑块和滑环来代替两个做平行滑动的物体;另外,由测定方法可知,做平行滑动物体的运动速度为圆周速度。
所以选用电动机作为驱动动力,即把滑环装在电动机的转轴上,滑块固定不动。
垂直作用力可以加在滑块上,通过控制电动机转轴的转动来模拟作平行滑动的物体,其平面示意图如图1所示。
通过调研发现,由于国外生产的钻井液润滑测试仪价格比较昂贵,现在我国大多数油田都普遍使用国内生产的润滑测试仪,但国内所生产的钻井液润滑测试仪具有两个不足之处,一是只能测定摩阻系数且不能直观显示其数值,这些仪器都采用转速表来指示相对运动速度、压力表指示垂直正压力和扭力表直接指示由于相对运动而产生的摩擦力,然后再通过图表或公式换算,这给用户带来很大的不便;二是电动机的转速不能实现自动控制,只能通过手动调整电位器达到所需的转速。
鉴于现在所使用的钻井液润滑测试仪的现状,我们提出以下的设计思想:由电机拖动理论可知,当直流他励式电机以恒定速度运转、滑块上施加垂直作用力时,作用在电机转轴上的电磁转矩式式上,由于扭力扳手测的是力矩,其单位是n·m。
光伏水泵系统中CVT 及MPPT 的控制比较a余世杰 何慧若 曹仁贤(合肥工业大学能源研究所,合肥230009)文 摘:光伏阵列的最大功率点跟踪器可使光伏水泵系统获得实时的最大功率输出。
出于方便及降低系统造价,世界上大多数国家的光伏水泵系统产品迄今仍采用恒定电压跟踪器(CVT ),以代替真正的最大功率点跟踪器(MPP T )。
本文通过计算机仿真进一步阐明了CVT 与MP PT 的区别并证明MP PT 在很大程度上优于CVT ,特别是对于冬、夏及全日内温差较大的场合。
关键词:光伏水泵,CVT ,M PP T ,仿真,比较0 引 言近几年光伏水泵系统数量在世界范围内迅速增长,特别是非洲、南美、澳洲及亚洲各国,其增长幅度相当大,印度近5年来新安装的光伏水泵系统约有4000台套,连能源供应远不算紧张的泰国,1992年以来也在其乡村安装了近千台光伏水泵系统,其它如马来西亚、印度尼西亚、孟加拉、缅甸等许多国家也都有一定幅度的增长。
其迅速增长的原因,不外是近几年来太阳电池、电力电子及微电子技术的快速发展及人们环保意识的不断增强,许多实例都进一步证明了光伏水泵系统的经济性要优于柴油机水泵,而且具有全自动、高可靠性、无人值守等特点,非常适合边远地区使用。
当然,许多国家都制定了相应的鼓励政策,这也是光伏水泵快速发展的原因之一。
由于CVT (恒定电压跟踪器)的制造相对简单,目前许多国家的产品仍然采用这种跟踪方式以代替相对复杂一些的MPPT (最大功率点跟踪器),但这种方式所带来的功率损失相比于近代微电子技术的迅速发展及微电子器件的大幅度降价,已经显得很不经济。
本文通过对具体系统的计算机仿真阐明了MPPT 远较CVT 合理。
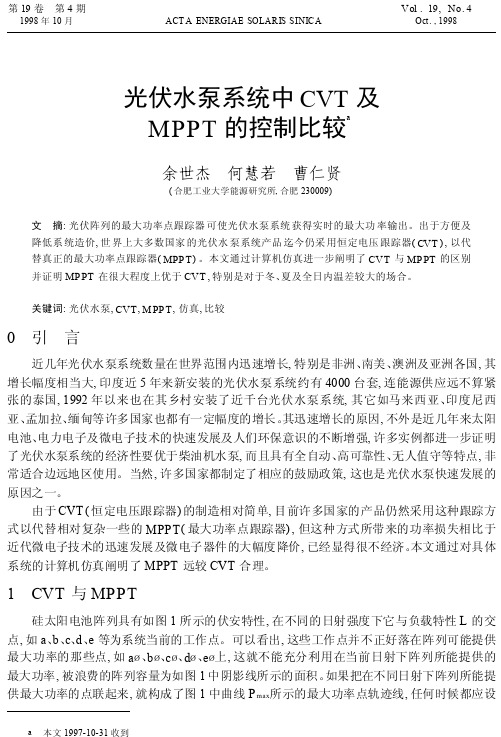
1 CVT 与MPPT硅太阳电池阵列具有如图1所示的伏安特性,在不同的日射强度下它与负载特性L 的交点,如a 、b 、c 、d 、e 等为系统当前的工作点。
可以看出,这些工作点并不正好落在阵列可能提供最大功率的那些点,如a ø、b ø、c ø、d ø、e ø上,这就不能充分利用在当前日射下阵列所能提供的最大功率,被浪费的阵列容量为如图1中阴影线所示的面积。


光伏水泵系统组成及工作原理光伏水泵系统组成及工作原理系统组成及工作原理1.1 光伏水泵系统的结构图由图1可知,系统利用太阳电池阵列将太阳能直接转变成电能。
经过DC/DC升压,和具有TMPPT功能的变频器后输出三相交流电压驱动交流异步电机和水泵负载,完成向水塔储水功能。
其中主要包括4部分:太阳电池阵列;具有TMPPT功能的变频器;水泵负载;储水装置。
1.2 变频器主电路及硬件构成本系统所采用的主电路及硬件控制框图如图2所示。
主电路DC/DC部分采用性能优越的推挽正激式电路进行升压;DC/AC部分采用三相桥式逆变电路。
主功率器件采用ASIPM(一体化智能功率模块)PS12036,系统控制核心由16位数字信号控制器dsPIC30F2010构成。
外围控制电路包括阵列母线电压检测和水位打干检测电路。
系统首先通过初始设置的工作方式和PI参数工作,然后由MPPT子程序实时搜索出的电压值作为内环CVT的给定,通过PI调节得到工作频率值,计算出PWM信号的占空比,实现光伏阵列的真正最大功率跟踪(TMPPT),并保持异步电机的V/f比为恒值。
系统将MPPT 和逆变器相结合,利用ASIPM模块自带的故障检测功能进行检测和保护,结构简单,控制方便。
1.2.1 DC/DC升压电路简述1.2.1.1主电路选择对于中小功率的光伏水泵来说,光伏阵列电压大都是低压(24v、36v、48V),对于升压主电路的选择,人们一般选择推挽电路,因为推挽电路变压器原边工作电压就是直流侧输入电压,同时驱动不需隔离,因此比较适合输入电压较低的场合。
但是偏磁问题是制约其应用的一大不利因素,功率管的参数差异和变压器的绕制工艺都有可能使推挽电路工作在一种不稳定状态。
基于诸多因素的考虑,本系统采用了结构新颖的推挽正激电路,此电路拓扑不仅克服了偏磁问题,而且闭环控制也比较容易(二阶系统)。
1.2.l.2推挽正激电路简单分析推挽正激电路如图2所示,由功率管S1及S2,电容C8和变压器T组成,变压器T 原边绕组N1及N2具有相同的匝数,同名端如图2所示。

dsPIC30F1.0概述与适用范围本文档定义了dsPIC30F系列数字信号控制器(Digital Signal Controller,DSC)的编程规范。
本编程规范仅供使用第三方工具对dsPIC30F器件进行编程的开发人员使用。
使用dsPIC30F器件的客户应该采用支持器件编程的开发工具。
本文档包括下列器件的编程规范:• dsPIC30F2010、 2011和 2012• dsPIC30F3010、 3011、 3012、 3013和3014• dsPIC30F4011、 4012和 4013• dsPIC30F5011、5013、 5015和 5016• dsPIC30F6010、 6011、 6012、 6013、 6014和6015• dsPIC30F6010A、6011A、 6012A、 6013A和6014A2.0dsPIC30F的编程概述dsPIC30F系列DSC包含一块用于简化器件编程的片上存储区域。
这部分存储区用于存储编程执行程序,编程执行程序使得能够以比传统方法更快的速度对dsPIC30F 器件编程。
一旦外部编程器(如Microchip的MPLAB®ICD 2、 MPLAB® PM3 或 PRO MATE® II)将编程执行程序存储到该存储区,编程执行程序就能与外部编程器配合工作来对器件高效编程。
编程器和编程执行程序存在一种主从关系,其中编程器是主编程设备,而编程执行程序则处于从动地位,如图2-1所示。
可使用两种方法对用户系统中的芯片编程。
一种方法是使用增强型在线串行编程(In-Circuit Serial Programming TM,ICSP TM)协议,并使用编程执行程序。
另一种方法是仅使用在线串行编程(ICSP™)协议,不使用编程执行程序。
增强型ICSP协议采用速度更快的高电压编程法,这个编程方法利用了编程执行程序。
编程执行程序通过一个小的命令集提供擦除、编程和校验芯片所必需的所有功能。
基于dsPIC30F2010控制的光伏水泵
变频器的研究
合肥工业大学能源研究所教育部光伏系统工程研究中心
我国西部偏远地区仍有上百万农牧民无电力供应,而且此地区气候干旱,土地荒漠化,草原退化情况越来越严重,采用光伏水泵系统合理地开发地下水资源,对于解决该地区的饮水和农业用水问题,改善生态环境,具有重要意义。
而光伏水泵技术的核心是专用变频器的设计,如何设计和太阳电池阵列相匹配,具备太阳电池最大功率点跟踪及光伏水泵系统特有的各种保护功能的变频器,是本文重点。
一、系统组成及工作原理
1.光伏水泵系统的结构图
图1 系统的结构图
由图1可知,系统利用太阳电池阵列将太阳能直接转变成电能,经过DC-DC升压,和具
有TMPPT功能的变频器后输出三相交流电压驱动交流异步电机和水泵负载,完成向水塔储水
功能。
其中主要包括四部分:太阳电池阵列、具有TMPPT功能的变频器、机泵负载和储水装置。
2.变频器主电路及硬件构成
本系统所采用的主电路及硬件控制框图如图2所示,主电路DC-DC部分采用性能优越的推
挽正激式电路进行升压;DC-AC部分采用三相桥式逆变电路,主功率器件采用ASIPM(一体化
智能功率模块)PS12036,系统控制核心由16位数字信号控制器dsPIC30F2010构成,外围控制
电路包括阵列母线电压检测和水位打干检测电路,系统首先通过初始设置的工作方式和PI
参数工作,然后由MPPT子程序实时搜索出的电压值作为内环CVT的给定,通过PI调节得到工
作频率值,计算出PWM信号的占空比,实现光伏阵列的真正最大功率跟踪(TMPPT),并保持异
步电机的V/f比为恒值。
系统将MPPT和逆变器相结合,利用ASIPM模块自带的故障检测功能进
行检测和保护,结构简单,控制方便。
图2 主电路及硬件构成
(1)DC-DC升压电路简述
①主电路选择
对于中小功率的光伏水泵来说,光伏阵列电压大都是低压(24V、36V、48V),对于升压主电路的选择,人们一般选择推挽电路,因为推挽电路变压器原边工作电压就是直流侧输入电压,同时驱动不需隔离,因此比较适合输入电压较低的场合。
但是偏磁问题是制约其应用的一大不利因素,功率管的参数差异和变压器的绕制工艺都有可能使推挽电路工作在一种不稳定状态。
基于诸多因素的考虑,本系统采用了结构新颖的推挽正激电路,此电路拓扑不仅克服了偏磁问题,而且闭环控制也比较容易(二阶系统)。
②推挽正激电路简单分析
推挽正激电路如图2所示,由功率管S1、S2,电容Cs和变压器T组成,变压器T原边绕组N1、N2具有相同的匝数,同名端如图所示。
当S1、S2同时关断的时候,电容Cs两端电压下正上负,且等于阵列电压,当S1开通S1、N2和光付阵列构成回路,N2上正下负,同时Cs、N1和S1构成回路,Cs放电,N1下正上负,此时的工作相当于两个正激变换器的并联。
同理,当S2开通S1关断时也相当于两个正激变换器的并联。
经过理论分析,推挽正激电路是一个二阶系统,因此闭环控制简单,同时输出滤波电感和电容大大减小。
(2)dsPIC30F2010简单介绍
Microchip公司通过在16位单片机内巧妙地添加DSP功能,使Microchip的dsPIC30F数字信号控制器(DSC)同时具有单片机(MCU)的控制功能以及数字信号处理器(DSP)的计算能力和数据吞吐能力。
因为它具有的DSP功能,同时具有单片机的体积和价格,所以本系统采用此芯片作为控制器。
此芯片主要适用于电机控制,如直流无刷电机、单相和三相感应电机及开关磁阻电机;同时也适用于不间断电源(UPS)、逆变器、开关电源和功率因数校正等。
dsPIC30F2010管脚示意如图3所示。
主要结构:12KB程序存储器、512字节SRAM、1024字节EEPROM、3个16位定时器、 4个输入捕捉通道、2个输出比较/标准PWM通道、6个电机控制PWM通道、
6个10位500kspsSA/D转换器通道。
主要特点:A/D采样速度快且多通道可以同时采样,6个独立/互补/中心对齐/边沿对齐的PWM,2个可变成的死区,在噪声环境下5V电源可正常工作,最低工作电压3V,A/D采样
和PWM 同期同步。
图3 dsPIC30F2010引脚图图4 太阳能电池的特性曲线
二、光伏水泵MPPT设计
1. 常规CVT方式的特点与不足
CVT方式可以近似获得太阳电池的最大功率输出,软件上处理比较简单。
但实际上日照
强度和温度是时刻变化的,尤其是在西部地区,同一天中的不同时段,温度和日照强度变化
都相当大,这些都会引起太阳电池阵列最大功率点电压的偏移,其中尤以温度的变化影响最大。
在这种情况下采用CVT方式就不能很好的跟踪最大点,为克服这一弊端,提出了TMPPT(True Maximum Power Point Tracking)概念,其意思是“真正的最大功率跟踪”控制,即保证系统不论在何种日照及温度条件下,始终使太阳电池工作在最大功率点处。
由于逆变
器采用恒V/f控制,故水泵电机的转速与其输入电压成正比,因此,调节逆变器的输出电压,就等于调节了负载电机的输出功率。
故本系统采用TMPPT方式使太阳电池尽可能工作在最大
功率点处,为负载提供最大的能量。
2.TMPPT的原理与实现
由太阳电池阵列的P-V特性曲线(图4 )可知,在最大功率点处,dP/dV = 0, 在最大功率点的左侧,当dP/dV > 0时,P呈增加趋势, dP/dV < 0时,P呈减少趋势;但在最大功率点的右侧,当dP/dV > 0时,P呈减少趋势,dP/dV < 0时,P呈增加趋势。
据此可在实际运行时根据P-V的变化关系确定最大功率点。
图(5)为TMPPT型最大功率点跟踪控制框图。
系统的输入指令值为0,反馈值为dP/dV,假定Z3状态为+1,则U SP*指令电压增加,经CVT环节调整,系统的输出电压V跟踪U SP*增加,采样输出电流I,经功率运算环节和功率微分环节,获得dP/dV值,如dP/dV > 0,则
Z1为+1,Z2为+1,Z3为+1,USP*指令电压继续增加。
如dP/dV < 0,则Z1为-1,Z2
为-1,Z3为-1,USP*指令电压开始减小。
稳定工作时,系统在最大功率点附近摆动,如
摆动幅度越小,则精度越高。
在具体工作时,为了防止搜索方向的误判断,软件中设置了搜
索限幅值,使系统的工作可靠性进一步提高。
由于本系统中采用的ASIPM模块带有电流检测
功能,故在硬件设计上可以省去电流检测电路,节约了成本,并进一步优化了外围电路。
图(5)TMPPT型最大功率点跟踪控制框图
三、系统的保护功能设计
过流和短路保护功能:由于ASIPM的下臂IGBT母线上串有采样电阻,所以通过检测母
线电流可以实现保护功能。
当检测电流值超过给定值时,被认为过流或短路,此时下桥臂IGBT门电路被关断,同时输出故障信号,dsPIC检测到此信号时封锁PWM脉冲进一步保护后
级电路。
欠压保护功能:ASIPM通过检测下桥臂的控制电源电压,如果电源电压连续低于给定电
压10uS,则下桥臂各相IGBT均被关断,同时输出故障信号,在故障期间,下桥臂3相IGBT
的门极均不接受外来信号。
过热保护功能:ASIPM内置检测基板温度的热敏电阻,热敏电阻的阻值被直接输出,dsPIC通过检测其阻值可以完成过热保护功能。
以上保护是利用了ASIPM自身带有的功能,无需外加电路,进一步简化了硬件电路设计。
系统除了具有上述保护功能外,还具有光伏水泵系统特有的低频﹑日照低﹑打干(自动和手
动打干)等保护功能。
对于泵类负载,当转速低于下限值时,光伏阵列所提供的能量绝大部
分都转化为损耗,长期低速运行,会引起发热并影响水泵使用寿命,因此,本系统设计了低
频保护,对水泵来说,当液面低于水泵进水口时,水泵处于空载状态,若不采取措施,长时
间运行则会损坏润滑轴承,而本系统为户外无人值守工作方式,故系统为了增加检测可靠性,采用了自动打干和手动打干两种识别方式,其中,自动打干是根据系统输出功率和电机工作
频率来进行判别;手动打干则是通过水位传感器识别当前水位高低来实现的。
由于低频﹑日
照低﹑打干等功能都是由软件来完成,不需增加硬件电路,故系统结构简
四、结束语
本系统DC-DC环节采用的推挽正激式电路在性能、经济等方面优于传统的拓扑结构,非常适用于光伏水泵系统。
DC-AC环节采用最新的ASIPM模块大大简化了电路,提高了系统的可靠性。
控制策略上采用TMPPT最大功率点跟踪控制方法,提高了系统效率、简化了系统结构,同时本系统还采用了数字信号控制器(DSC)dsPIC30F2010对于提高系统运行速度,改善系统性能起着重要作用。
总之,基于上述结构的光伏水泵控制器,无论在结构、功能、成本和可靠性等方面都具有明显的优越性和市场竞争力。