机械设计基础第二章平面连杆机构解读
- 格式:ppt
- 大小:10.16 MB
- 文档页数:82



机械设计基础平面连杆机构1. 介绍平面连杆机构是机械设计中常见的一种机械结构,由若干杆件组成并通过铰链连接。
这种机构广泛应用于各种机械装置和系统中,如发动机、机械手等。
平面连杆机构的设计目标是通过合理配置连杆的长度和铰链位置来实现特定的运动,使它能够完成所需的工作。
在设计过程中,需要考虑机构的稳定性、刚度、运动路径等因素,以确保机构能够正常运行并满足设计要求。
本文将介绍平面连杆机构的基本原理、设计要点和常见应用实例。
2. 基本原理平面连杆机构的基本原理是利用杆件的长度和铰链的位置,通过特定的连杆结构来实现机构的运动。
2.1 连杆连杆是平面连杆机构中的主要组成部分,通常由刚性材料制成。
连杆通过铰链连接在一起,形成一个闭合的结构。
连杆的长度和形状对机构的运动特性有重要影响。
常见的连杆形状有直杆、曲杆和弧杆等。
在设计时,需要根据具体的运动要求和空间限制选择适当的连杆形状和长度。
2.2 铰链铰链是连杆机构中的连接件,用于连接连杆并允许相对运动。
铰链通常由轴和轴承组成,能够实现转动或滑动运动。
铰链的位置对机构的运动轨迹和运动范围有决定性影响。
在设计时,需要合理选择铰链的位置和类型,以满足设计要求。
3. 设计要点3.1 运动要求在设计平面连杆机构时,首先需要明确机构的运动要求。
例如,需要确定机构的运动类型(旋转、直线、滑动等)、运动范围、速度和加速度等。
这些要求将指导后续的连杆和铰链的设计。
3.2 连杆长度连杆的长度直接决定机构的运动幅度和工作空间。
在设计时,需要根据运动要求和空间限制选择合适的连杆长度。
较短的连杆长度可提高机构的刚度和稳定性,但限制了运动范围;较长的连杆长度可以实现更大的运动幅度,但可能会导致机构不稳定。
3.3 铰链位置铰链的位置是机构设计中的关键因素之一,它直接影响机构的运动轨迹和运动范围。
在选择铰链位置时,需要考虑到机构的运动要求、连杆长度以及其他约束条件,以实现所需的运动轨迹。
3.4 负载和刚度在设计平面连杆机构时,需要考虑机构受到的负载和所需的刚度。


第2章平面连杆机构2.1平面连杆机构的特点和应用连杆机构是由若干刚性构件用低副连接组成的机构,又称为低副机构。
在连杆机构中,若各运动构件均在相互平行的平面内运动,称为平面连杆机构;若各运动构件不都在相互平行的平面内运动,则称为空间连杆机构。
平面连杆机构被广泛应用在各类机械中,之所以广泛应用,是因为它有较显著的优点:(1)平面连杆机构中的运动副都是低副,其构件间为面接触,传动时压强较小,便于润滑,因而磨损较轻,可承受较大载荷。
(2)平面连杆机构中的运动副中的构件几何形状简单(圆柱面或平面),易于加工。
且构件间的接触是靠本身的几何约束来保持的,所以构件工作可靠。
(3)平面连杆机构中的连杆曲线丰富,改变各构件的相对长度,便可使从动件满足不同运动规律的要求。
另外可实现远距离传动。
平面连杆机构也存在一定的局限性,其主要缺点如下:(1)根据从动件所需要的运动规律或轨迹设计连杆机构比较复杂,精度不高。
(2)运动时产生的惯性力难以平衡,不适用于高速的场合。
(3)机构中具有较多的构件和运动副,则运动副的间隙和各构件的尺寸误差使机构存在累积误差,影响机构的运动精度,机械效率降低。
所以不能用于高速精密的场合。
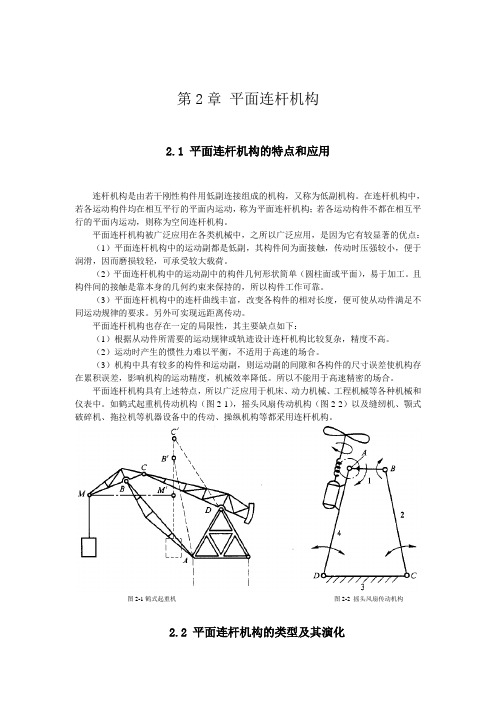
平面连杆机构具有上述特点,所以广泛应用于机床、动力机械、工程机械等各种机械和仪表中。
如鹤式起重机传动机构(图2-1),摇头风扇传动机构(图2-2)以及缝纫机、颚式破碎机、拖拉机等机器设备中的传动、操纵机构等都采用连杆机构。
图2-1鹤式起重机图2-2 摇头风扇传动机构2.2平面连杆机构的类型及其演化2.2.1 平面四杆机构的基本形式全部用转动副组成的平面四杆机构称为铰链四杆机构,如图2-3所示。
机构的固定件4称为机架;与机架相联接的杆1和杆3称为连架杆;不与机架直接联接的杆2称为连杆。
能作整周转动的连架杆,称为曲柄。
仅能在某一角度摆动的连架杆,称为摇杆。
按照连架杆的运动形式,将铰链四杆机构分为三种基本型式:曲柄摇杆机构、双曲柄机构和双摇杆机构。



《机械设计基础》第2章_平面连杆机构解析机械设计基础第2章介绍了平面连杆机构的解析方法,本文将详细探讨平面连杆机构的基本概念以及运动规律,并通过实例分析解算过程。
平面连杆机构是由几个连杆和连接件组成的机械装置,常见于各种机械设备和机器人中,具有重要的机械传动功能。
解析平面连杆机构的目的是求解机构中各个连杆的位置、速度和加速度等运动参数,在设计和优化机构的过程中起到关键作用。
首先,我们需要了解平面连杆机构的基本构件和运动方式。
平面连杆机构包括刚性连杆、铰链、曲轴和悬臂等,在运动过程中,这些构件之间通过铰链连接,可以实现不同形式的运动传动。
平面连杆机构中常见的运动有转动运动、直线运动和复合运动。
其次,我们需要了解平面连杆机构的运动规律。
平面连杆机构的运动规律可以通过几何方法或者代数方法进行求解。
几何方法主要是通过建立连杆的几何关系来求解连杆的位置和速度,而代数方法则是通过建立连杆的运动学方程来求解连杆的加速度。
几何方法中常用的解析方法有正弦定理和余弦定理。
通过应用这些定理,可以获得连杆的长度和角度关系,从而求解出连杆的位置和速度。
例如,在一个平面连杆机构中,已知一根连杆的长度和角度,可以利用余弦定理求解出另一根连杆的长度和角度。
代数方法中常用的解析方法有速度、加速度和加加速度分析法。
这些方法是通过建立连杆的运动学方程,并对方程进行求导得到速度、加速度和加加速度的表达式。
例如,在一个平面连杆机构中,已知连杆的运动学方程,可以对其进行求导,得到连杆的速度和加速度表达式。
最后,我们通过一个实例来详细解析平面连杆机构的运动规律。
假设我们有一个平面连杆机构,包括两根等长的连杆和一个铰链。
已知一根连杆的长度为L,角度为θ,我们希望求解另一根连杆的位置、速度和加速度。
首先,利用余弦定理求解另一根连杆的长度。
根据余弦定理,可以得到连杆的长度与角度的关系式。
然后,利用连杆长度与角度的关系式,可以求解出连杆的长度。
接下来,利用几何方法求解连杆的速度。




