汽车转向系统动力学12N.pdf
- 格式:pdf
- 大小:892.43 KB
- 文档页数:40
可编辑修改精选全文完整版车辆系统动力学车辆系统动力学是一门涉及汽车系统的动力性研究的学科,旨在分析和模拟汽车的动力性能。
它是由应用力学和流体力学原理来研究动态特性,从而为汽车开发工程人员提供关键性信息和支持,以实现车辆系统的有效运行。
车辆系统动力学的研究分为两个主要方面:静动力学和结构动力学。
静动力学是研究汽车静力学和动力学系统,以及它们之间的相互作用。
静动力学的研究内容包括汽车的刚性构件的静力学计算,汽车转矩和加速度的动态测定,车辆悬架系统的构造、测量和控制,动力性能的行驶特性测定,以及汽车的操纵和漂移特性的研究。
结构动力学包括研究汽车结构,如悬架、底盘和发动机,以及这些系统的动态特性测定。
车辆系统动力学的研究可以分为三个主要领域:实验动力学、分析动力学和仿真动力学。
实验动力学主要负责试验机械结构以及机械系统的动力特性测定。
它可以分析出机械系统的动力特性,以及机械系统和动力学分析模型之间的关系。
分析动力学是通过数学分析的方法,计算和分析汽车的动力特性。
仿真动力学则使用计算机模拟技术,模拟汽车在不同行驶条件下的性能,并进行动力学和控制分析。
车辆系统动力学是一个复杂的研究领域,需要广泛的原理、理论和技术来支持。
它为车辆开发工程人员提供关键的研究信息,以便更好地了解汽车的动力性能,从而更好地解决汽车发动机、悬架和底盘等系统的限制问题,实现更低排放、更安全的汽车运行。
车辆系统动力学的研究目标是提高汽车的动力性能:提高燃油经济性、排放控制效果,降低汽车维护成本,延长汽车使用寿命,减少汽车故障发生率,并提高汽车在不同地形环境下的行驶质量。
未来,随着新技术的发展,车辆系统动力学的研究将不断进步,为汽车的改进和开发提供可靠的技术支持。
从而,车辆系统动力学是一门跨学科领域的非常重要的研究领域,它不仅涉及传统的汽车工程学科,还涉及力学、控制、物理、流体、电子、计算机等学科,是一门复杂而又有应用前景的学科。
因此,车辆系统动力学是汽车研发、维护和诊断的重要基础,也是汽车系统安全、经济、高效运行的关键。

1.绪论1.1转向系统概述汽车转向系统是指汽车上用来改变或恢复其行驶方向的专设机构称为汽车转向系统。
汽车的转向系统是用来改变汽车行驶方向和保持汽车直线行驶的机构。
1.1.1基本组成转向操纵机构主要由转向盘、转向轴、转向管柱等组成。
它的作用是将驾驶员转动转向盘的操纵力传给转向器。
转向器将转向盘的转动变为转向摇臂的摆动或齿条轴的直线往复运动,并对转向操纵力进行放大的机构。
转向器一般固定在汽车车架或车身上,转向操纵力通过转向器后一般还会改变传动方向。
转向传动机构将转向器输出的力和运动传给车轮(转向节),并使左右车轮按一定关系进行偏转的机构。
1.1.2类型按转向能源的不同,转向系统可分为机械转向系统和动力转向系统两大类。
机械转向系统:由转向器和转向传动机构组成。
转向传动机构是由转向臂(转向垂臂),直拉杆,直拉杆臂,左右梯形臂,横拉杆,若干球头关节组成。
动力转向系统:由机械转向系加转向加力装置构成。
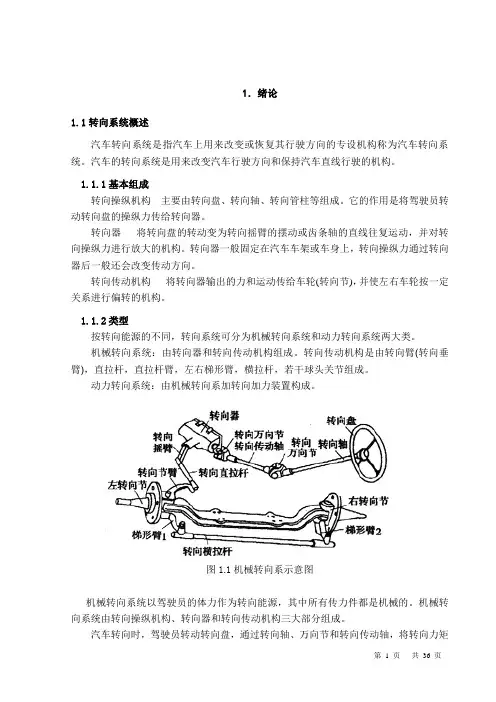
图1.1机械转向系示意图机械转向系统以驾驶员的体力作为转向能源,其中所有传力件都是机械的。
机械转向系统由转向操纵机构、转向器和转向传动机构三大部分组成。
汽车转向时,驾驶员转动转向盘,通过转向轴、万向节和转向传动轴,将转向力矩输入转向器。
从转向盘到转向传动轴这一系列部件即属于转向操纵机构。
转向器中有1~2级啮合传动副,具有减速增力作用。
经转向器减速后的运动和增大后的力矩传到转向摇臂,再通过转向直拉杆传给固定于左转向节上的转向节臂,使左转向节及装于其上的左转向轮绕主销偏转。
左、右梯形臂的一端分别固定在左、右转向节上,另一端则与转向横拉杆作球铰链连接。
当左转向节偏转时,经梯形臂1、横拉杆和梯形臂2的传递,右转向节及装于其上的右转向轮随之绕主销同向偏转相应的角度。
转向摇臂、转向直拉杆、转向节臂、梯形臂和转向横拉杆总称为转向传动机构。
梯形臂以及转向横拉杆和前轴构成转向梯形,其作用是在汽车转向时,使内、外转向轮按一定的规律进行偏转。

车辆转向系统动力学研究车辆转向系统是汽车中一个非常重要的组成部分。
它通过操纵方向盘,使车辆按照驾驶员的意愿改变行驶方向。
在日常生活中,我们经常可以看到车辆转向的动作,但很少有人关注到这背后涉及到的动力学问题。
本文旨在探讨车辆转向系统的动力学研究,深入了解其中的原理和相关理论。
1.转向系统的基本组成车辆转向系统由多个部件组成,其中最核心的是转向机构。
转向机构通过机械力的传递,将驾驶员的方向盘转变为车轮的转向角度。
在传统的机械转向系统中,通常采用齿轮、皮带等方式进行传递。
而在近年来,电动转向系统的出现,使得传动方式更加灵活和高效。
2.转向系统的动力学原理在车辆转向时,驾驶员施加在方向盘上的力矩通过转向机构传递到车轮上,从而使车辆改变行驶方向。
在转向过程中,需要克服许多外界因素的干扰,如道路摩擦力、悬挂系统的影响等。
因此,转向系统的动力学原理十分复杂。
3.转向系统的稳定性转向系统的稳定性是指车辆在转向过程中是否能够保持平衡,并且稳定地按照驾驶员的意愿行驶。
稳定性问题对于驾驶员的操控能力和行车安全至关重要。
研究表明,车辆稳定性受多个因素影响,包括车辆的质量分布、悬挂系统的刚度以及转向机构的设计等。
4.非线性特性与控制转向系统的非线性特性是指在不同工况下,转向系统的动力学特性表现出不同的行为。
这种非线性特性对汽车控制系统的设计和优化提出了巨大挑战。
为了提高车辆转向系统的控制性能,研究人员通常采用PID控制器、模糊控制等方法来补偿非线性特性,进而实现转向系统的稳定性和灵活性。
5.动力学仿真模型的建立为了更好地理解和研究转向系统的动力学行为,研究人员常常通过建立动力学仿真模型来模拟车辆转向过程。
这些模型可以基于多种理论和方法,如质点模型、刚体模型以及多体动力学模型等。
通过仿真模型的建立,可以研究转向系统在不同工况下的动态响应以及优化设计方案。
6.自动驾驶技术对转向系统的影响随着自动驾驶技术的快速发展,传统的转向系统正面临着巨大的改变和挑战。

第五章汽车转向系统动力学问题的提出汽车转向系统动力学是研究驾驶员给系统以转向指令后汽车在曲线行驶中的运动学和动力学特性。
这一特性影响到汽车操纵的方便性和稳定性,所以也是汽车安全性的重要因素之一,因而成为汽车系统动力学中重要研究内容之一。
汽车操纵稳定性是与汽车的车速密不可分的,早期的低速汽车还谈不上稳定性的问题,最早出现稳定性的问题,是在具有较高车速的轿车上或赛车上,目前,随着车速的不断提高,轿车、大客车、载货汽车的设计都离不开汽车操纵稳定性的研究。
近年来,有许多学者研究这一问题,并取得很多成果。
操纵性不好的汽车的主要表现:1.“飘” -有时驾驶员并没有发出转向的指令,而汽车开始自己改编本方向,使人感到汽车漂浮2.“贼”-有时汽车像受惊的马,忽东忽西,汽车不听驾驶员的指令;3.“反应迟钝”-驾驶员虽然发出指令。
但是汽车还没有转向反映,转向过程反应较慢;4.“晃”-驾驶员发出了稳定的转型指令,可使汽车左右摇摆,行驶方向难以稳定,当汽车受到路面不平,或者是侧向风扰动时,汽车就会出现左右摇摆;5.“丧失路感”-正常汽车转弯的程度,会通过转向盘在驾驶员的手上产生相应的感觉,有些汽车操纵性不好的汽车,特别是在汽车车速较高时,或转向急剧时会丧失这种感觉,这会增加驾驶员操纵困难,或影响驾驶员的正确判断6.“失去控制”-某些汽车的车速超过一个临界值以后,驾驶员已经不能控制器行驶的方向。
汽车的操纵稳定性:在驾驶者不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
汽车的操纵性:汽车能及时而准确的反映驾驶员主观操作的能力,也就是按照驾驶员的愿望维持或改变原来的行驶路线的能力。
汽车的稳定性:汽车在外力干扰下,仍能保持或很快恢复原来行驶状态和方向,而不致丧失控制、发生侧滑或翻车的能力。
两者的关系:操纵性的丧失常导致侧滑、回转、甚至翻车;而稳定性的破坏也往往使汽车失去操纵性,处于危险状态。
(2)动力转向系统的工作原理动力转向系统是在机械式转向系统的基础上加一套动力辅助装置组成的。
如下图,转向油泵6安装在发动机上,由曲轴通过皮带驱动并向外输出液压油。
转向油罐5有进、出油管接头,通过油管分别与转向油泵和转向控制阀2联接。
转向控制阀用以改变油路。
机械转向器和缸体形成左右两个工作腔,它们分别通过油道和转向控制阀联接。
当汽车直线行驶时,转向控制阀2将转向油泵6泵出来的工作液与油罐相通,转向油泵处于卸荷状态,动力转向器不起助力作用。
当汽车需要向右转向时,驾驶员向右转动转向盘,转向控制阀将转向油泵泵出来的工作液与R腔接通,将L腔与油罐接通,在油压的作用下,活塞向下移动,通过传动结构使左、右轮向右偏转,从而实现右转向。
向左转向时,情况与上述相反。
液压动力转向系统示意图l.转向操纵机构2.转向控制阀3.机械转向器与转向动力缸总成4.转向传动结构5.转向油罐6.转向油泵R.转向动力缸右腔L.转向动力缸左腔汽车动力转向器的类型及工作原理作者:admin 来源:不详发布时间:2007-2-7 6:13:45减小字体增大字体采用动力转向系统的汽车转向所需的能量,在正常情况下,只有小部分是驾驶员提供的体能,而大部分是发动机(或电机)驱动的油泵(或空气压缩机)所提供的液压能(或气压能)。
用以将发动机(或电机)输出的部分机械能转化为压力能,并在驾驶员控制下,对转向传动装置或转向器中某一传动件施加不同方向的液压或气压作用力,以助驾驶员施力不足的一系列零部件,总称为动力转向器。
下面介绍动力转向器的类型及工作原理。
(1)动力转向器的类型按传能介质的不同,动力转向器有气压式和液压式两种。
装载质量特大的货车不宜采用气压动力转向器,因为气压系统的工作压力较低(一般不高于0.7MPa),用于重型汽车上时,其部件尺寸将过于庞大。
液压动力转向器的工作压力可高达10MPa以上,故其部件尺寸很小。
液压系统工作时无噪声,工作滞后时间短,而且能吸收来自不平路面的冲击。
sw δ转向盘转角反应时间τ稳定时间
σ稳态横摆角速度0r ω超调量%1000
1
⨯r r ωωt
峰值反应时间
ε最大横摆角速度
1r ω
78910111213 1028361413 9210351312
驾驶员-汽车闭环系统
运动微分方程
υ
ωυ
θυωθ
υ&&++和r t y r
t x u t
u a u t u a =∆∆∆=
-≈∆∆-∆=
→∆→∆lim
lim
)
()(cos 2121υωυωδ&&++r Y Y r Y Y u m F F u m F F ≈+⇒=+Y 向力平衡
r
z Y Y r
z Y Y I F L F L I F L F L ωωδ&&≈-⇒=-22112211cos 对质心取矩
运动微分方程
⎪⎪⎩
⎪⎪⎨⎧
=--+-+=--++⎪⎪⎩⎪⎪⎨⎧
-=-=-+=--=⎩⎨
⎧=-+=+r z r r r r
r r r z r I k L u k L k L k L k L u m k u k L k L k k u L u L u
L I k L k L u m k k ωδωβωυδωβωβωυαδωβξδαωααυ
ωαα&&&&1122212122111221121222112221112211)()()()()()()(代入,则将∑Y
F ∑
Z T
转向灵敏度
1r S m L
ωδ⎫=⎪⎭+(212k L L m
K =
稳态响应的三种类型
前后轮车偏角绝对值之差
转向半径比值
1R R =静态储备系数
..S M =
固有频率ω
ζ阻尼比ζ=反应时间τ
峰值反应时间ε
频率响应函数
幅频特性()()()
(()1020
2r
r H j B B ωδ
ωωωδωζωωω
ω
ω-=
=
-=+相频特性
()ωA =()ωφ=
前后侧偏柔度
gi
fe ei di ci bi ai i D D D D D D D D ++++++=
D ai −侧向力引起的轮胎弹性侧偏角(º/g)
侧倾外倾引起的侧偏角,(º/g)
γ
φγ
∂∂−侧倾外倾系数−一个g 时的外倾角
g γφg
bi k k D γγ
γγΦΦ∂∂=
侧向力变形外倾引起的侧偏角,(º/g)
E −回正力矩系数( Nm/rad)
轮胎回正力矩引起前、后轮侧偏力的变化而产生的侧偏角D di
)( )(1
1
22211bk E D bk E D D d a d ==−侧向力变形外倾系数y
F ∂∂γ
g Y
Z ci F k k F D γγγ
Φ∂∂=
1000
e 1和e 2−轮胎拖距;
α1=57.3G(b+e 2)/(k 1L)=57.3Gb(L+e 2/b)/(k 1L) α2=57.3G(a-e 1)/(k 2L)=57.3Ga(L-e 1/a)/(k 2L)
轮胎回正力矩引起前、后轮侧偏力的变化而产生的侧偏角D di mg F y1’F y2’
e 1
e 2
a
b
a-e 1
b+e 2
L
侧倾转向引起的车轮转向角,(º/g)
侧向力变形转向引起的车轮转向角
g
Y
ei D γδΦΦ∂∂=
Y
Z fi F F D ∂∂=
δ1000−侧倾转向系数
γ
δΦ∂∂−侧向力变形转向系数
Y
F ∂∂δ
回正力矩变形转向引起的车轮转向角,(º/g)
U =D 1-D 2不足转向量稳定性因数
K =U/(57.3 gL)
T
T D Z gi ∂∂=
δ100−回正力矩变形转向系数
T
∂∂δ
固有频率ω
阻尼比ζ
反应时间τ
峰值反应时间ε
ζωζζε-⎥⎥
⎦⎤⎢⎢⎣⎡-=
2
0211arctg
侧风力
横摆风力矩
22
)(r
y yw v
A C F ρ
τ⋅
=e
F v L A C M yw r
M zw =⋅
⋅=22
)(ρ
τ
侧风力系数
横摆风力矩系数
τ
y y C C '=τM
M C C '=2
ρωA C K y '=常数概括为系数
侧风力
横摆风力矩
2r
yw v K F τω=2r
v
e K M τωω=y
M C L C e '⋅'=
)()()(.
.2121.
21ψτδψ
βαααααv v m v K K K L K L v
K K r
w b a +=+--+
+..
212212.
21)()(ψ
τδψ
βαααααz r
w a b a b a I v e K K L K L K L v
K L K L =+--+
+直线行驶时0
00===⋅
⋅
⋅
⋅βψψ,,02
121=+-+r
w v K K K K τδβααα)(0
2121=+--r
w a b a v e K K L K L K L τδβααα)(
2
1122αααατδK K e L K e L K L K v a b w r
⋅--+⋅
⋅=)()(δ=0所需的风压中心距
)
()(21210ααααK K L K L K e b a +-=
对转弯半径的影响
L
R ctg v =δv
v v L L R δδδ≈
=sin cos 纯前轮转向时
附加后轮转向后
)
1()]1(sin[cos *
L v L v v K L
K L R -≈
-=δδδ极限转弯半径
)
1()
1(max max
L h L
L L
h g K LK K K L
R -=
-≈
δδ
对转向传动比影响
纯前轮转向时
w
av v i δδ∆=
∆全轮转向时
(1)(1)
w w av
a v h v L L i i K K δδδδδ∆∆===
∆-∆∆--
纯前轮转向时
全轮转向时
稳态横摆角速度增益..
21v w av v L i Kv ψψδδ==+.221()
(1)1(1)
a
L a av v L i K v L Kv i Kv ψδ-==++
瞬态时域响应
频率特性。