无人机着陆回收方式盘点
- 格式:pdf
- 大小:440.59 KB
- 文档页数:3

①自主着陆固定翼无人机最常用的回收方法与全尺寸飞机有相似之处,在跑道上降落。
除了非常小的飞行器之外,要使用这种回收方法,无人机必须装有起落架(机轮),同时它的控制系统必须能够完成固定翼飞机的常规拉平操纵,实践证明在飞机着陆滑行期间,方向控制是极为重要的,这也是要求无人机必须具备某种控制系统。
一种经常使用的适于跑道降落的技术是给无人机装一个尾钩,并在跑道上安装阻拦装置。
在这种方式中,飞机着陆进场期间对方向控制的需求和对机裁制动的需求可以减至最低。
这种方法与甲板着陆技术类似。
目前普遍使用的拦阻装置吸能器主要有两种;1摩擦制动,它有一个绕着缆绳或袋子的卷筒,其缆绳或带子连接到甲板拦阻索上(与无人机尾钩咬合的缆绳或带子,即使是用于着陆跑道也称作“甲板拦阻索”):2旋转液压制动,一个带有转子的简易水涡轮,与一个绕着尼龙带的卷筒衔接,与摩擦制动类似,尼龙带与甲板拦索依次相连。
这两种制动系统之间有着明显的区别。
使用摩擦制动时,制动力通常可以预先设定,且制动距离(无人机被阻拦的距离)取决于无人机的重量和着陆速度。
而旋转液压制器被认为是“恒定距离阻拦装置”,即使无人机的重量在一定限制条件下才是正确的。
旋转液压制系统按照无人机的重量和着陆速度设计点来设置,与设计点之间有10%~20%误差,是可以接受的。
滑橇式着陆在“天眼”(skyeye)无人机中得到了成功的运用,并且具有无需辅装的跑道路面的优点,没有大的障碍物的较平整的跑道面都可使用。
“天眼”使用一个配有减震器的滑橇,沿路保持无人机直线滑行。
当触地时,发动机停车,滑橇和地面之间的摩擦使无人机停止运动。
减震器的使用免去了飞机拉平动作;无人机只需设定一个较低的下沉率,然后飞到着陆场地。
由经典的拦阻索回收系统派生而来的是将拦阻网连接到缓冲器的滑轮绳系上,取代甲板拦阻索。
这种网必须设计成能将无人机罩住,并使制动负荷平均作用于机身结构上。
非常小型的飞机只需以一个较小的角度飞到地面,然后停止滑行。
无人机的发射与回收发射与回收系统是无人机的一个重要功能系统,是满足无人机机动灵活、重复使用以及高生存能力等多种需求的必要技术保障。
从物理学角度看,无人机的发射与回收过程均是对无人机做功的过程,发射过程对无人机提供能量,而回收过程则是吸收无复杂,火箭脱落时与后置式动力装置易发生干涉。
按照发射架与无人机的相对位置关系,分为悬挂式和下托式发射方式。
悬挂式多用于共轴式发射、离轨下沉量较大的无人机;而下托式多用于夹角式发射、离轨下沉量较小的无人机。
图1RQ-2“先锋”(Pioneer)无人侦察机单夹角发射火箭助推器发射优点是机动灵活、通用性好、应用广泛,几乎适用于任何类型的飞机,是常用的无人机发射方式之一;缺点是设计火工品的贮存、运输和使用,发射时具有声光烟等容易暴露发射阵地的较强物理特征。
(这个无所谓吧,打一枪换一个地方呗)于/s,且安全性较差。
目前中小型低速无人机多采用液压弹射技术。
图2英国“不死鸟”无人机液压弹射发射弹射起飞方式优点是机动灵活、安全性和隐蔽性好;缺点是发射质量受限制,滑轨不能太长,一般只适用于中小型低速无人机。
3、地面滑跑起飞地面滑跑起飞主要原理是利用无人机自身发动机的推力,驱动无人机在跑道上加速起飞。
分为起飞车滑跑起飞和轮式起落架滑落起飞。
地面滑跑起飞的优点是发射系统部分简单可靠,配套地面保空中发射的优点是发射系统部分简单;缺点主要是对载机的要求高,依赖于机场保障,使用成本高,机动灵活性差。
5、其他发射方式1)手抛式适用于小型无人机,如美国“指针”FQM-151A,“大乌鸦”RQ-11。
图6美国“大乌鸦”无人机手抛式发射2)垂直起飞是无人直升机和旋翼机的垂直或短距离起飞方式。
如美国的对伞降后无人机的损伤程度有直接影响。
着陆过载较大时,若想降低着陆速度,需要以增大伞衣面积及降低回收精度为代价。
2、着陆滑跑回收着陆滑跑回收主要是采用起落架或滑撬在跑道或平整地面上滑行,通过滑行摩擦阻力或其他阻拦装置(阻拦网、阻拦索或阻力伞)使无人机在地面上逐步减速直至停止。

航空航天工程师的航天器着陆和回收技术航空航天工程师是在航空航天领域中从事技术研究、设计和制造工作的专业人员。
航天器着陆和回收技术是航空航天工程师在航天器发射后的重要环节之一,它对保证航天任务的成功以及未来空间探索的可持续性都具有重要意义。
本文将探讨航空航天工程师的航天器着陆和回收技术。
一、着陆技术1. 着陆目标航天器着陆技术是指将航天器安全地降落在预定的目标区域,确保航天器和载人乘员的完好无损。
着陆目标通常包括陆地、海洋或其他星球表面等,不同目标的着陆技术也存在差异。
2. 着陆方式航天器的着陆方式主要包括软着陆和硬着陆两种。
软着陆是指航天器在着陆时速度较低、冲击力较小,通过缓冲装置等手段减少着陆冲击。
硬着陆则相对较为粗暴,速度较高且着陆冲击较强,事先不需要缓冲装置。
3. 着陆控制航天器的着陆控制主要依靠推进器、降落伞以及姿态控制装置等技术手段。
通过精确的姿态控制、速度控制以及轨道调整等操作,航天器能够准确地降落到预定目标区域。
二、回收技术1. 回收意义航空航天工程师在航天器着陆后需要进行回收,这是为了将航天器重新利用,并且减少对环境的影响。
航天器的回收可以节约资源、降低成本,并为未来的任务提供有价值的经验和数据。
2. 回收方式航天器的回收方式主要有无人回收和载人回收两种。
无人回收指的是无人飞行器自主完成回收任务,比如载货飞船的自动返航过程。
载人回收则是指有航天员在航天器返回过程中进行必要的操控和操作。
3. 回收验证航空航天工程师在航天器回收过程中需要进行验证和检测,确保航天器的完好无损以及航天员的安全。
这包括对航天器的结构、热保护系统以及降落伞等进行全面评估和测试。
三、未来发展趋势1. 自主着陆技术随着航空航天技术的不断进步,自主着陆技术将会得到进一步发展。
航天器能够通过自主导航系统以及高精度的传感器实现更加准确和安全的着陆过程。
2. 可重复使用航天器目前,大部分航天器在完成任务后均会被废弃或坠毁。
无人机的发射与回收 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】无人机的发射与回收发射与回收系统是无人机的一个重要功能系统,是满足无人机机动灵活、重复使用以及高生存能力等多种需求的必要技术保障。
从物理学角度看,无人机的发射与回收过程均是对无人机做功的过程,发射过程对无人机提供能量,而回收过程则是吸收无人机的能量。
一、发射技术1、火箭助推发射火箭助推发射主要是利用火箭助推器的能量,在短时间内将无人机加速到一定的速度和高度,一般采用零长发射和短轨发射方式。
按照火箭助推器的使用数量及在无人机上连线布置形式的不同,可分为:单发共轴式、单发夹角式、双发夹角式和箱式自动连续发射等。
共轴式助推发射火箭推力线与机体轴线一致,无人机加速迅速,推力线线控制与调整简单,但推力座设置复杂,特别是后置式动力装置协调困难。
夹角助推式或加推离线与机体轴线成一定角度,推力座设置简单,但推力线控制与调整要求较为复杂,火箭脱落时与后置式动力装置易发生干涉。
按照发射架与无人机的相对位置关系,分为悬挂式和下托式发射方式。
悬挂式多用于共轴式发射、离轨下沉量较大的无人机;而下托式多用于夹角式发射、离轨下沉量较小的无人机。
图1 RQ-2“先锋”(Pioneer)无人侦察机单夹角发射火箭助推器发射优点是机动灵活、通用性好、应用广泛,几乎适用于任何类型的飞机,是常用的无人机发射方式之一;缺点是设计火工品的贮存、运输和使用,发射时具有声光烟等容易暴露发射阵地的较强物理特征。
(这个无所谓吧,打一枪换一个地方呗)2、弹射起飞弹射起飞的主要原理是将液压能、气压能或弹性势能等不同形式能量转换为机械动能,使无人机在一定长度的滑轨上加速到安全起飞速度。
按发射动力能源的不同形式,可分为:液压弹射、气压弹射、橡筋弹射、电磁弹射等。
(1)起飞速度小于25m/s,起飞重量小于100kg,通常采用橡筋弹射方式;(2)起飞速度小于25~45m/s,起飞重量小于400kg,通常采用气压或液压弹射方式。
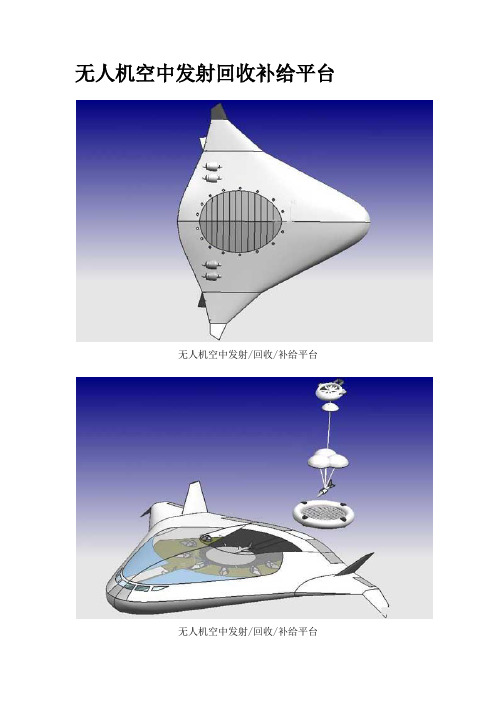
无人机空中发射回收补给平台无人机空中发射/回收/补给平台无人机空中发射/回收/补给平台无人机空中发射/回收/补给平台无人机空中发射/回收/补给平台无人机空中发射/回收/补给平台该平台主要是用来实现无人机在空中发射与回收,同时完成加油与弹药补给,以实现无人机的快速再次投入战斗。
在作战中,无人机平台可通过自身的机载设备,实现它与地面部队、空中战机和总部之间的相互通信,使无人机之间,无人机与其它战斗机之间协同作战。
这套系统主要由空中回收/支援母机,隐身无人机组成。
回收支援平台采用升浮一体的空气动力盘翼式飞艇,盘翼式飞艇由浮力、空气动力和反作用力三者共同提供升力,盘翼式飞艇与相同载荷能力的常规飞艇相比,其几何尺寸可缩小75%~80%, 且迎风面积减小88%~90%,这样大大减小了空气阻力,在大推力发动机作用下,提高了巡航速度,同时获得了更好的机动性。
在飞艇中央安装有盘翼,里面装有升力风扇和大型货舱。
由货舱内壁构成一个环形通道。
该飞艇起飞时,由升力风扇和环形通道排出的气流产生气垫效应,使飞艇获得较单体大3~4倍的升力,可以装载大量的补给燃油和弹药,轻松、迅速地离地升空。
盘翼内腔的其余部位的舱室则用来充填氦气,供该飞艇产生浮力,抵消自重。
盘翼中央上下表面均设有可以偏转的叶栅,该飞艇在垂直起降或悬停时打开。
平飞的时候则关闭以减小空气阻力。
在平飞中,整个翼身融合的艇身产生空气动力升力,并保证所需的操纵性和稳定性,位于艇身后面的4台大涵道比涡轮风扇发动机,提供巡航推力,同时使用多台能够在大气环境下工作的离子引擎。
引擎装置在飞行器尾部,工作时由高达3万伏的直流电将带有负电的电子从空气中抽出,分离出正负离子,由此使正离子获得加速度,产生高速离子束,带动空气产生推力,而产生电流所需要的能量,白天靠太阳能电池供电,夜间靠再生式燃料电池供电。
机身底部布置环形气垫,使其能够在水面和陆地上着陆。
无人机的空中发射:当平台处在高空时,将无人机投下,对无人机发出指令,打开阻力伞,无人机发动机点火,待启动成功后,与阻力伞脱离。
无人机着陆回收方式盘点无人机着陆回收方式盘点相比于起飞,无人机回收是一个更为复查、也更容易出现故障的阶段,能否安全着陆已经成为评价无人机性能的一项重要指标。
据宇辰网整理,目前无人机的回收方式主要有伞降回收、撞网回收、起落架滑轮着陆、空中勾取回收等。
起落架/滑撬着陆起落架/滑撬着陆是大多数固定翼无人机采用的方式,其原理与有人驾驶飞机类似,需要专用跑道或者开阔的场地,因此缺乏灵活性。
为了缩短滑跑距离,有些无人机会在尾部装上尾钩,在滑跑过程中,尾钩勾住地面的拦截锁,通过拦截索的弹性变形吸收无人机的动能。
伞降回收伞降回收是国内外中小型无人机经常采用的方式之一。
在回收过程中,当无人机到达预定回收区中心点上空时,其所配备的降落伞会按照预定程序或者在地面站的指挥下开伞,使无人机缓缓着陆,整个过程较为简单,对操作人员的要求也比较低。
但其缺点也显而易见:降落伞对无人机来说是一种载荷,且需要占据机身内有限的空间;由于无人机下降速度较快,在着陆瞬间,机体容易受到较强烈的冲击,造成损伤,若果在海上降落,则需要为无人机具备足够的防水能力,且打捞过程也比较麻烦,甚至可能需要借助专业的海上回收设备。
改进伞降回收的一个有效办法是:为无人机配备减震气囊。
在无人机飞行期间,气囊置于机体身内部,主伞打开后,气囊充气并自动伸出,以吸收无人机与地面接触瞬间的冲击能量,避免设备损伤。
着陆完成后,排除气囊内的气体,方便再次使用。
这种气囊不仅可以缓解着陆冲击,还能防止着陆过程中间出现反弹现象。
撞网回收撞网回收指的是无人机在地面无线设备和自动引导设备的引导下,逐渐降低高度,减小速度,然后正对着拦截网飞去,从而达到回收的目的。
完整的拦阻网系统通常由拦阻网/绳、能量吸收装置和自动引导设备组成,可以使无人机在撞网后,速度很快降为零,且不受场地限制,尤其适用于舰上回收。
但由于网的面积有限,在气象状况不好时,难以保证无人机准确入网。
一旦出现偏差,撞击到其他设施,后果不堪设想。
无人机废弃物处理与资源回收办法1. 引言随着无人机应用的不断普及和发展,无人机废弃物的处理和资源回收问题日益引起人们的关注。
大量的无人机废弃物对环境造成了很大的压力,并可能对人类健康造成潜在威胁。
因此,制定高效的无人机废弃物处理与资源回收办法,既是履行环保责任的需要,也是保护人类健康的重要措施。
2. 无人机废弃物的分类和特点2.1 电池无人机电池是其中最主要的废弃物。
电池的材料中含有有毒物质,如果不妥善处理,可能对环境造成严重污染。
2.2 电子元器件无人机内部装有大量的电子元器件,包括芯片、电路板等。
这些元器件中含有的金属和化学物质也对环境造成潜在危害。
2.3 机械结构和塑料部件无人机的机械结构和塑料部件通常由金属和塑料材料构成。
废弃的机械结构和塑料部件如果不加以处理,可能会对自然环境产生负面影响。
3. 无人机废弃物处理办法3.1 电池处理严格按照当地法律法规要求,将电池投放到专门的废物收集点或回收机构进行处理。
对于可回收利用的电池部分,可以通过专门的处理设施进行拆解和分离,将有价值的材料提取出来进行回收利用。
3.2 电子元器件处理对于可回收的电子元器件,可以进行专门的处理和清洗,以便将其中的有害物质去除,然后进行回收利用。
对于无法回收利用的电子元器件,应在专门的废物处理单位进行无害化处理,以减少环境污染。
3.3 机械结构和塑料部件处理进行物理拆解处理,将机械结构和塑料部件分离,方便进行后续的回收利用。
将机械结构和塑料部件送至专门的再加工厂进行粉碎和熔化,提炼有用的原料。
4. 无人机废弃物资源回收办法除了对无人机废弃物进行处理外,我们还应该致力于实现其资源的回收利用,以减少对自然资源的消耗和环境的压力。
4.1 电池资源回收对于无人机废弃的电池,可以通过专门的回收机构进行回收,然后进行分类、处理和利用。
如有效回收的废旧电池可以进行再生利用,提取出其中的有色金属、稀有金属以及其他有用材料。
4.2 电子元器件资源回收无人机内部的电子元器件中含有很多贵重金属和稀有金属。
无人机发射和回收方法一览【摘要】同有人驾驶飞机的起飞和降落阶段一样,在无人机的运用中,发射与回收阶段往往被认为是最困难、最关键的阶段,同样也是多种多样的。
本文以支持发射与回收的载体机构作为分类依据,列举了目前常见的无人机发射和回收方法。
【关键词】无人机;发射和回收方法无人机是“无人驾驶空中飞行器”(UAV)或“遥控驾驶飞行器”(RPV)的简称,无人机的“无人”这一特点,使其在运用的时候默默无闻,不能像有人驾驶飞机那样,被外界大书特书。
在一般人眼里,无人机可能就是一架遥控飞机,或是电视新闻里无人机一些侦察的场面,除此之外,也许就是一些展览中的图片和数据的堆砌。
但是,近年来,无人机的飞速发展引起世界各国的普遍关注,无论在国防领域还是在民用方面都有广泛的应用。
同有人飞机的起飞和降落阶段一样,在无人机的运用中,发射与回收阶段往往被认为是最困难、最关键的阶段,同样也是多种多样的,世界无人机有多少种发射方式和回收方式,这很难说出精确数字,但可以肯定地说,比有人飞机的起飞着陆方式要多得多。
一、无人机的发射方法无人机的发射方法有很多,在概念上有些十分简单,有些又十分复杂。
许多发射概念源于各种大型飞行器的发射经验,另一些为小型无人飞行器所特有。
目前常见的发射方式有起落架滑跑(Wheeled Take-off Launcher)、起飞跑车滑跑(Running Launcher)、母机空中发射(Air Drop Launcher)、发射架上发射或弹射(Catapult Launcher)、容器(箱式)内发射或弹射(Tube Launcher)、火箭助推(Booster Rocket Launcher)、垂直起落(Vertical Take-off Launcher)、缆绳系留、手抛(Hand Launcher)和自动发射(Auto Launcher)等方法。
或许简单的发射方式源于航模的“手抛发射”。
这种方式很实用,但仅适用于重量相对较轻的飞行器,这类飞行器载重量低,动力适当。
无人机的发射与回收无人机的发射与回收Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】无人机的发射与回收发射与回收系统是无人机的一个重要功能系统,是满足无人机机动灵活、重复使用以及高生存能力等多种需求的必要技术保障。
从物理学角度看,无人机的发射与回收过程均是对无人机做功的过程,发射过程对无人机提供能量,而回收过程则是吸收无人机的能量。
一、发射技术1、火箭助推发射火箭助推发射主要是利用火箭助推器的能量,在短时间内将无人机加速到一定的速度和高度,一般采用零长发射和短轨发射方式。
按照火箭助推器的使用数量及在无人机上连线布置形式的不同,可分为:单发共轴式、单发夹角式、双发夹角式和箱式自动连续发射等。
共轴式助推发射火箭推力线与机体轴线一致,无人机加速迅速,推力线线控制与调整简单,但推力座设置复杂,特别是后置式动力装置协调困难。
夹角助推式或加推离线与机体轴线成一定角度,推力座设置简单,但推力线控制与调整要求较为复杂,火箭脱落时与后置式动力装置易发生干涉。
按照发射架与无人机的相对位置关系,分为悬挂式和下托式发射方式。
悬挂式多用于共轴式发射、离轨下沉量较大的无人机;而下托式多用于夹角式发射、离轨下沉量较小的无人机。
图1 RQ-2“先锋”(Pioneer)无人侦察机单夹角发射火箭助推器发射优点是机动灵活、通用性好、应用广泛,几乎适用于任何类型的飞机,是常用的无人机发射方式之一;缺点是设计火工品的贮存、运输和使用,发射时具有声光烟等容易暴露发射阵地的较强物理特征。
(这个无所谓吧,打一枪换一个地方呗)2、弹射起飞弹射起飞的主要原理是将液压能、气压能或弹性势能等不同形式能量转换为机械动能,使无人机在一定长度的滑轨上加速到安全起飞速度。
按发射动力能源的不同形式,可分为:液压弹射、气压弹射、橡筋弹射、电磁弹射等。
(1)起飞速度小于25m/s,起飞重量小于100kg,通常采用橡筋弹射方式;(2)起飞速度小于25~45m/s,起飞重量小于400kg,通常采用气压或液压弹射方式。
无人机着陆回收方式盘点
相比于起飞,无人机回收是一个更为复查、也更容易出现故障的阶段,能否安全着陆已经成为评价无人机性能的一项重要指标。
据宇辰网整理,目前无人机的回收方式主要有伞降回收、撞网回收、起落架滑轮着陆、空中勾取回收等。
起落架/滑撬着陆
起落架/滑撬着陆是大多数固定翼无人机采用的方式,其原理与有人驾驶飞机类似,需要专用跑道或者开阔的场地,因此缺乏灵活性。
为了缩短滑跑距离,有些无人机会在尾部装上尾钩,在滑跑过程中,尾钩勾住地面的拦截锁,通过拦截索的弹性变形吸收无人机的动能。
伞降回收
伞降回收是国内外中小型无人机经常采用的方式之一。
在回收过程中,当无人机到达预定回收区中心点上空时,其所配备的降落伞会按照预定程序或者在地面站的指挥下开伞,使无人机缓缓着陆,整个过程较为简单,对操作人员的要求也比较低。
但其缺点也显而易见:降落伞对无人机来说是一种载荷,且需要占据机身内有限的空间;由于无人机下降速度较快,在着陆瞬间,机体容易受到较强烈的冲击,造成损伤,若果在海上降落,则需要为无人机具备足够的防水能力,且打捞过程也比较麻烦,甚至可能需要借助专业的海上回收设备。
改进伞降回收的一个有效办法是:为无人机配备减震气囊。
在无人机飞行期间,气囊置于机体身内部,主伞打开后,气囊充气并自动伸出,以吸收无人机与地面接触瞬间的冲击能量,避免设备损伤。
着陆完成后,排除气囊内的气体,方便再次使用。
这种气囊不仅可以缓解着陆冲击,还能防止着陆过程中间出现反弹现象。
撞网回收
撞网回收指的是无人机在地面无线设备和自动引导设备的引导下,逐渐降低高度,减小速度,然后正对着拦截网飞去,从而达到回收的目的。
完整的拦阻网系统通常由拦阻网/绳、能量吸收装置和自动引导设备组成,可以使无人机在撞网后,速度很快降为零,且不受场地限制,尤其适用于舰上回收。
但由于网的面积有限,在气象状况不好时,难以保证无人机准确入网。
一旦出现偏差,撞击到其他设施,后果不堪设想。
绳钩回收
绳钩回收指的是利用绳索抓捕无人机翼尖小钩来实现回收的一种方式,主要由回收绳、吸能缓冲装置、导引装置等组成,占用空间小,且不易受天气影响。
去年,波音的子公司Insitu公布了一个功能强大的无人机发射和绳钩回收系统——FLARES。
该系统既可以作为固定翼无人机的发射台,又可以对无人机进行回收。
去年八月,Insitu公司利用“扫描鹰”无人机对FLARES进行了一系列测试。
测试期间,下方搭载了“扫描鹰”的FLARES直接飞上空中,开始盘旋,“扫描鹰”随之加速,最后脱离飞出。
FLARES飞回发射基台,在操作人员将回收系统固定在其底部后,FLARES再次升空准备回收无人机。
当无
人机飞来时,回收绳会抓住固定翼中的一翼,工作人员随后立即操作地面上的滑轮组,从而减轻缆绳的张力。
滑轮系统的工作原理类似于一个钓鱼杆的线轴,可以在捕获无人机的过程中吸收无人机的动量。
气囊方式
气囊不仅可以配合降落伞使用,也可以单独作为一种着陆方式使用。
这种方式不需要起落架和降落伞,无人机在着陆前打开气囊,然后直接触地即可借此实现缓冲目的。
但需要注意的是,依靠气囊直接着陆,缓冲能力有限,只适用于微小型无人机。