2014-10 ECA Moral Candy
- 格式:doc
- 大小:101.00 KB
- 文档页数:4
![小学上册E卷英语第1单元真题试卷[有答案]](https://img.taocdn.com/s1/m/099e2d0c001ca300a6c30c22590102020640f241.png)
小学上册英语第1单元真题试卷[有答案]考试时间:90分钟(总分:140)B卷一、综合题(共计100题共100分)1. 小企鹅) waddles on the ice. 填空题:The ___2. 填空题:The ancient Egyptians built the Sphinx to guard the ________ (金字塔).3. 填空题:I like to plant ________ in spring.4. 选择题:What do we use to measure time?A. RulerB. ClockC. ScaleD. Tape答案: B5. 听力填空题:I believe that art is a powerful form of expression. It allows us to convey emotions and ideas in unique ways. I love visiting art galleries and appreciating different styles.6. 填空题:The first successful heart transplant was performed by ________ (克里斯托弗·里德).7. 选择题:What do we call a building where we go to pray?A. ChurchB. SchoolC. MuseumD. Library8. 听力题:I enjoy _____ (reading/watching) movies.Which planet spins on its side?A. VenusB. UranusC. MarsD. Mercury10. 填空题:My sister has a pet ______ (鹦鹉) that mimics voices.11. 听力题:A solution is considered saturated when it cannot dissolve any more ______.12. 听力题:The _______ of sound can be affected by the distance from the source.13. 填空题:I love _______ (参加)科学项目.14. 听力题:The Earth's surface is covered by large bodies of ______.15. 选择题:What is the opposite of 'light'?A. HeavyB. BrightC. DarkD. Dim答案:C16. 填空题:I like to ride my ________ (摩托车).17. 听力题:Molecules can be polar or ______.18. 听力题:We are going to ___ some science. (learn)19. 填空题:The __________ (历史的记忆保留) ensures continuity.20. ts are ______ (食虫植物) that catch insects. 填空题:Some plaWhat is the largest planet in our solar system?A. EarthB. MarsC. JupiterD. Saturn答案: C22. 听力题:A ______ is a large area of flat land.23. 听力题:Sound cannot travel in a ______ (vacuum).24. 填空题:My favorite song is ______.25. 选择题:Which of these is a vegetable?A. AppleB. CarrotC. BananaD. Grape26. 听力题:The Earth's atmosphere protects it from harmful ______.27. 听力题:Chemical reactions often involve a change in ______.28. 选择题:What do we call the area of land that is covered with grass?A. ForestB. PrairieC. DesertD. Marsh答案: B. Prairie29. 听力题:A _______ is a process that involves cooling.30. 听力题:The chemical formula for sulfur dioxide is ______.31. 填空题:My friend's sister is . (我朋友的妹妹是。

PEDAL DE EXPRESIÓN/VOLUMEN EV-1GUÍA DEL PRODUCTOEl pedal de Expresión/Volumen EV-1 de Fractal Audio Systems ofrece una robusta carcasa de metal fundido, una superficie de pisado de goma cómoda y no resbaladiza, tensión de pedal ajustable, potenciómetro dual de expresión/volumen, y un recorrido largo y suave con maquinaria Planetary. El EV-1 está disponible en Plata o Negro.EL EV-1 COMO PEDAL DE EXPRESIÓNEl EV-1 es perfecto para su uso como PEDAL DE EXPRESIÓN con todoslos productos de Fractal Audio Systems y muchos dispositivos de otrosfabricantes. Su potenciómetro de 100K y su maquinaria Planetaryofrecen una respuesta genuinamente lineal. Conecta el jackEXPRESSION del EV-1 al jack PEDAL o de expresión del otro dispositivoutilizando un cable 1/4” TRS-a-TRS (punta-anillo-camisa, es decir,“estéreo”) de alta calidad. Los cables de guitarra normales nofuncionarán. NOTA: los productos de Fractal Audio Systems como elAxe-Fx o el FX8 necesitan que CALIBRES el pedal una vez conectado.Lee el manual para más detalles.EL EV-1 COMO PEDAL DE VOLUMENANALÓGICOEl EV-1 tiene una doble función como PEDAL DE VOLUMENANALÓGICO con un potenciómetro de audio de 500K. Cuandoutilices el EV-1 como PEDAL DE VOLUMEN conéctalo entre elinstrumento o dispositivos de nivel de línea utilizando los jacksIN y OUT del EV-1 con cables estándar no balanceados parainstrumentos (punta-camisa,”TS”o “mono”). NO uses lasfunciones de Expresión y Volumen al mismo tiempo o podríanproducirse bucles de masa.AJUST DE LA TENSIÓN DEL PEDALEl EV-1 ofrece la opción de un ajuste de la tensión del pedal de fácil acceso.Utiliza un destornillador de estrella para realizar el ajuste como se muestra.Gira en el sentido del reloj para aumentar la tensión.Si necesitaras ayuda con tu EV-1, por favor visítanos en www.g66.eu。
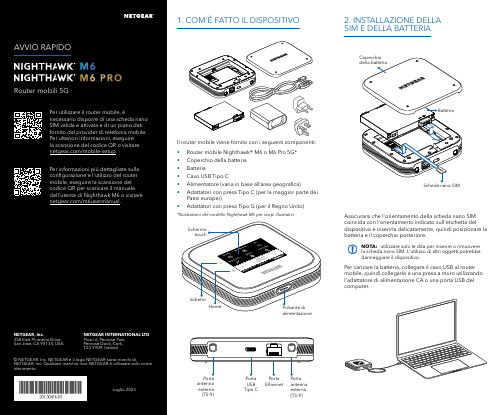
Per caricare la batteria, collegare il cavo USB al router mobile, quindi collegarlo a una presa a muro utilizzando l'adattatore di alimentazione CA o una porta USB del computer.Assicurarsi che l'orientamento della scheda nano SIM coincida con l'orientamento indicato sull'etichetta del dispositivo e inserirla delicatamente, quindi posizionare la batteria e il coperchio posteriore.NOTA: utilizzare solo le dita per inserire o rimuovere la scheda nano SIM. L'utilizzo di altri oggetti potrebbe danneggiare il dispositivo.1. COM'È FATTO IL DISPOSITIVO2. INSTALLAZIONE DELLA SIM E DELLA BATTERIAIl router mobile viene fornito con i seguenti componenti:• Router mobile Nighthawk® M6 o M6 Pro 5G*• Coperchio della batteria • Batteria• Cavo USB Tipo C• Alimentatore (varia in base all’area geografica)• Adattatori con presa Tipo C (per la maggior parte dei Paesi europei)•Adattatori con presa Tipo G (per il Regno Unito)*Illustrazioni del modello Nighthawk M6 per scopi illustrativi.antenna esterna (TS-9)antenna esterna (TS-9)USB Tipo CEthernetCONFORMITÀ NORMATIVA E NOTE LEGALIPer informazioni sulla conformità alle normative, compresala Dichiarazione di conformità UE, visitare il sito Web https:///it/about/regulatory/.Prima di collegare l'alimentazione, consultare il documento relativo alla conformità normativa.Può essere applicato solo ai dispositivi da 6 GHz: utilizzare il dispositivo solo in un ambiente al chiuso. L'utilizzo di dispositivi a 6 GHz è vietato su piattaforme petrolifere, automobili, treni, barche e aerei, tuttavia il suo utilizzo è consentito su aerei di grandi dimensioni quando volano sopra i 3000 metri di altezza. L'utilizzo di trasmettitori nella banda 5.925‑7.125 GHz è vietato per il controllo o le comunicazioni con sistemi aerei senza equipaggio.SUPPORTO E COMMUNITYDalla pagina del portale di amministrazione Web, fare clic sull'icona con i tre puntini nell'angolo in alto a destra per accedere ai file della guida e del supporto.Per ulteriori informazioni, visitare il sito netgear.it/support per accedere al manuale dell'utente completo e per scaricare gli aggiornamenti del firmware.È possibile trovare utili consigli anche nella Community NETGEAR, alla pagina /it.GESTIONE DELLE IMPOSTAZIONI TRAMITE L'APP NETGEAR MOBILEUtilizzare l'app NETGEAR Mobile per modificare il nome della rete Wi-Fi e la password. È possibile utilizzarla anche per riprodurre e condividere contenutimultimediali e accedere alle funzioni avanzate del router mobile.1. Accertarsi che il dispositivo mobile sia connesso a Internet.2. Eseguire la scansione del codice QR per scaricare l'appNETGEAR Mobile.Connessione con il nome e la password della rete Wi-Fi 1. Aprire il programma di gestione della rete Wi‑Fi deldispositivo.2. Individuare il nome della rete Wi‑Fi del router mobile(NTGR_XXXX) e stabilire una connessione.3. Only Connessione tramite EthernetPer prolungare la durata della batteria, l'opzione Ethernet è disattivata per impostazione predefinita. Per attivarla, toccare Power Manager (Risparmio energia) e passare a Performance Mode (Modalità performance).4. CONNESSIONE A INTERNETÈ possibile connettersi a Internet utilizzando il codice QR del router mobile da uno smartphone oppure selezionando manualmente il nome della rete Wi‑Fi del router e immettendo la password.Connessione tramite codice QR da uno smartphone 1. Toccare l'icona del codice QR sulla schermata inizialedello schermo LCD del router mobile.NOTA: quando è inattivo, lo schermo touch si oscura per risparmiare energia. Premere brevemente e rilasciare il pulsante di alimentazione per riattivare lo schermo.3. CONFIGURAZIONE DEL ROUTER MOBILETenere premuto il pulsante di accensione per due secondi, quindi seguire le istruzioni visualizzate sullo schermo per impostare un nome per la rete Wi‑Fi e una password univoci.La personalizzazione delle impostazioni Wi‑Fi consente di proteggere la rete Wi‑Fi del router mobile.Impostazioni APNIl router mobile legge i dati dalla scheda SIM e determina automaticamente le impostazioni APN (Access Point Name) corrette con i piani dati della maggior parte degli operatori. Tuttavia, se si utilizza un router mobile sbloccato con un operatore o un piano meno comune, potrebbe essere necessario immettere manualmente le impostazioni APN.Se viene visualizzata la schermata APN Setup Required (Configurazione APN richiesta), i dati APN dell’operatore non sono presenti nel nostro database ed è necessario inserirli manualmente. Immettere i valori fornitidall’operatore nei campi corrispondenti, quindi toccare Save (Salva) per completare la configurazione.NOTA: l’operatore determina le proprie informazioni APN e deve fornire le informazioni per il proprio piano dati. Si consiglia di contattare il proprio operatore per le impostazioni APN corrette e di utilizzare solo l’APN suggerito per il piano specifico.Schermata inizialeAl termine della configurazione, il router visualizza la schermata iniziale:Wi‑FiPotenza Carica Rete Codice QR connessione rapida Wi‑FiNome e Wi‑FiIcona del codice QR。


七色光公司链接类别编码(Dyenamo )包装规格价格备注100mg500mg1g100mg500mg1g100mg500mg1g100mg500mg 1g 100mg 500mg1g100mg500mg1g100mg500mg1g100mg500mg 1g5g Dyenamo公司链接DN-FI07近红外吸收染料名称:3-(2-((E)-2-((E)-3-((Z)-2-(3-(2-carboxyethyl)-1,1-dimethyl-1,3-dihydro-2H-benzo[e]indol-2-ylidene)ethylidene)-2-chlorocyclohex-1-en-1-yl)vinyl)-1,1-dimethyl-1H-benzo[e]indol-3-ium-3-yl)propanoate 别名:MK245CAS number:193208-79-6DN-FR 系列:金属有机染料DN-FR01(K77)名称: Ru(2,2´–bipyridine-4,4´-dicarboxylic acid)(4,4´-bis(2-(4-tert-butyloxyphenyl)ethenyl)-2,2´–bipyridine)(NCS)2别名:K77CAS number: 943720-18-1DN-F04(D35)名称:(E)-3-(5-(4-(Bis(20,40-dibutoxybiphenyl-4-yl)amino)phenyl)thiophen- 2-yl)-2-cyanoacrylic acid 别名:D35CAS 号:1197992-37-2DN-F05(D35cpdt)名称:3-{6-{4-[bis(2’,4’-dibutyloxybiphenyl-4-yl)amino-]phenyl}-4,4-dihexyl-cyclopenta-[2,1-b:3,4-b’]dithiophene-2-yl}-2-cyanoacrylic acid 别名:LEG4, D35CPDT DN-F05Y(Y123)名称: 3-{6-{4-[bis(2’,4’-dihexyloxybiphenyl-4-yl)amino-]phenyl}-4,4-dihexyl-cyclopenta-[2,1-b:3,4-b ’]dithiphene-2-yl}-2-cyanoacrylic acid 别名:Y123CAS 号: 1312465-92-1Dyenamo 产品目录2014注:Dyenamo 公司的产品由七色光负责中国地区的销售,产品为原装进口,会产生国外到中国的运费以及报关等费用DN-F 系列:有机染料DN-F01请致电或email:sales@hepta 询价名称:4-(diphenylamino)phenylcyanoacrylic acid 别名:L0CAS 号:30388-31-9DN-F02名称:5-[4-(diphenylamino)phenyl]thiophene-2-cyanoacrylic acid 别名:L1CAS 号:762269-56-7DN-F03(D5)名称:3-(5-(4-(diphenylamino)styryl)thiophen-2-yl)-2-cyanoacrylic acid 别名:D5, L2CAS 号:900182-08-35g10g25g5g10g25g5g10g 25g 5g 10g25g5g10g25g5g10g 25g DN-P0118片/组1微米厚的TiO2电极,含致密层1g 5g10g100mg 500mg1g100mg500mg1g 产品列表不断更新中,更多信息,请访问我们的网站或联系销售 QQ:1007797411, QQ群:50101302大连七色光太阳能科技开发有限公司,Tel0411-********,Fax0411-847963005,*********************, DN-C06化学式:Co(bpy)3(NO3)3名称:Tris-(2,2’-bipyridine)cobalt(II) tri(nitrate)DN-P 系列:钙钛矿型电池组件DN-P02用于制备CH3NH3PbI3的盐。


专利名称:MESSAGE TRANSFER SYSTEM 发明人:IIDA ICHIRO,NAKAGO AKIRA 申请号:JP30640787申请日:19871203公开号:JPH01147937A公开日:19890609专利内容由知识产权出版社提供摘要:PURPOSE:To prevent congestion of communication of a network by transferring a message to a transfer node of a new area automatically even when the message is sent to a node transferred addressed to an old area while the node is transferred between areas. CONSTITUTION:When a node A is transferred from an area of an area address (-1, -1) to an area of an area address (1, -1), the node A uses a relative address (-2, 0) between the new and old areas as a data to inform it to the old area. The node receiving the data of the old area uses a broadcast means 1 of the node A to inform the event of transferred node A and its relative address (-2, 0) to all nodes in the area. Each node receiving the notice uses a storage means 2 writes and stores the relative address in place of the output link number corresponding to the node A of the object node table. When a message addressed to the transferred node A reaches the old area, the node receiving it uses a relative address replacement means 3 of the node A to send the relative address of the message to the new area.申请人:FUJITSU LTD更多信息请下载全文后查看。

(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910276645.0(22)申请日 2019.04.08(71)申请人 山东乐檬生物科技有限公司地址 272000 山东省济宁市鱼台县张黄镇富康大道西、盛发路北(72)发明人 王志英 杨晓光 刘刚 周学建 (74)专利代理机构 石家庄元汇专利代理事务所(特殊普通合伙) 13115代理人 修红霞(51)Int.Cl.A23C 9/13(2006.01)A23C 3/00(2006.01)(54)发明名称一种含柑橘纤维的清洁标签酸奶及其制备方法(57)摘要本发明公开了一种含柑橘纤维的清洁标签酸奶,属于发酵乳制品技术领域,以重量份数计,每1000份酸奶中包括以下重量份的原料:生牛乳800-910份、糖类80-100份、浓缩牛奶蛋白粉1-20份、柑橘纤维1-30份和水余量,每1000份酸奶中发酵剂的用量为U。
通过加入一种食品配料柑橘纤维,能有效提升酸奶的稠厚度、实物感和货架期稳定性,满足消费者对清洁标签、配方简单的需求。
还能增加产品的功能性,作为膳食纤维原料,柑橘纤维的加入不仅可以增加饱腹感,还可以促进人体肠胃蠕动。
与常规发酵乳稳定剂体系相比,柑橘纤维在低用量下就能提供良好的增稠、保水性能,可为乳制品企业节约成本。
权利要求书1页 说明书4页 附图1页CN 109938097 A 2019.06.28C N 109938097A权 利 要 求 书1/1页CN 109938097 A1.一种含柑橘纤维的清洁标签酸奶,其特征在于,以重量份数计,每1000份酸奶中包括以下重量份的原料:生牛乳800-910份、糖类80-100份、浓缩牛奶蛋白粉1-20份、柑橘纤维1-30份和水余量,每1000份酸奶中发酵剂的用量为0.1-0.3U。
2.根据权利要求1所述的一种含柑橘纤维的清洁标签酸奶,其特征在于,以重量份数计,每1000份酸奶中包括以下重量份的原料:生牛乳910份、糖类80份、浓缩牛奶蛋白粉7.5份、柑橘纤维2份和水余量,每1000份酸奶中发酵剂的用量为0.2U。


摘要食源性晚期糖化终末产物(Advanced glycation end products,AGEs)是体内AGEs的重要来源,而体内AGEs的长期积累和糖尿病等慢性疾病之间具有潜在关联,因此消费者了解食品中AGEs含量的要求越来越强烈。
然而,对食品在消费端加工过程AGEs的变化,目前缺乏有效的、直观的及方便易懂的监测手段。
有鉴于此,本论文将时间温度指示器(Time-temperature indicator, TTI)技术应用到消费端食源性AGEs含量的监控中,选取荧光性AGEs作为AGEs的标志物,构建合适的美拉德反应型TTI,可以通过观察TTI的颜色变化了解食源性AGEs含量的变化,有效地弥补了消费端AGEs监控过程中的缺陷。
本论文的主要内容及研究成果如下:(1)美拉德反应型TTI指示AGEs含量的初步可行性分析分析了由氨基酸和单糖组成反应模型体系中美拉德反应的颜色和荧光性AGEs变化规律,可见,颜色和荧光性AGEs含量的变化规律具有一定的相似性。
但是,由于食品本身的颜色往往会掩盖加热过程中产生的颜色变化,故不能用反应体系的颜色变化反映AGEs含量的变化,需构建美拉德反应型的TTI用于指示食品体系中AGEs的含量变化。
对美拉德反应型TTI的组分、浓度和溶液pH进行初步筛选,结果表明:该TTI反应体系由浓度0.4 M赖氨酸、浓度范围为0.3~0.5 M木糖和pH 7.0的磷酸缓冲溶液组成,在420 nm处吸光度为1.2时为反应终点标志,此时TTI随时间和温度的积累,颜色呈现从无色、淡黄、橘黄、棕色直到深棕色的变化过程,具有较好的辨别力。
(2)美拉德反应型TTI体系动力学和性能的研究根据美拉德反应型TTI筛选结果,构建由不同浓度的木糖组成的美拉德反应型TTI 体系,分别为TTI-1(0.3 M木糖)、TTI-2(0.4 M木糖)和TTI-3(0.5 M木糖),它们的活化能分别为96.17 kJ/mol、87.98 kJ/mol和83.55 kJ/mol,根据TTI和食品质量的匹配原则,TTI-1、TTI-2和TTI-3可以指示的食品体系AGEs变化的反应活化能范围分别是71.17 kJ/mol ~121.17 kJ/mol、62.98 kJ/mol ~112.87 kJ/mol、58.55 kJ/mol ~108.55 kJ/mol。

IndexAAcetylene black(AB),137AC impedance,153Acrylic rubber,10,192ActA,478Actin,12,474,475,477,478Actin/myosin,459Activated carbon,137Activated carbon nanofiber(ACNF),127 Active,electrochemical-poroelasticbehavior,293Active self-organization(AcSO),460 Actuation pressure,180Actuator,29,135,248,409application,369drive circuit,362Additives,128–131Adenosine triphosphate(ATP),12 Adsorption(or ion exchange),334,335 process,78rate,334Aerogel,11AFM phase image,145Agent,332Agent model,332–333Air-buffer interface,467Amoeba-like creep,163Anion drive,92Anion-driven actuation,293Anionic gel,337Anisotropic,100Anisotropic LC networks,228 Antenna,21Application,131Aqueous electrolytes,96Arcomeres,454Artificial arm,193Artificial cilia,59Artificial muscles,191,231,344,412Artificial pupil,7Asymmetric charge distribution,165 Atomic force microscope(AFM),41ATP-driven bio-machine,459 Automobiles,23Autonomous intestine-like motion,66–67 Azobenzene,7BBackward motion,288Barium ferrite,8Beam-shaped,342Belousov-Zhabotinsky(BZ)reaction,4,52 Bending motion,123Bimorph,8,91,229Bio-actuator,12,473–475,477 Biocompatibilities,416Bioinspired,1Biomaterial,2Biomedical devices,21–22 Biomimetic,1,5Biomimetic robot,389Biomolecular motor,459Biotin,460Biot’s theory,294Bis-peroxides,30Black-box modeling,317Block copolymer,137Blocking force,94Block-like,42©Springer Japan2014K.Asaka,H.Okuzaki(eds.),Soft Actuators,DOI10.1007/978-4-431-54767-9499Body-length normalized wave number,375 Boltzmann factor,278Braille cell,117Braille display,357Braille size,359Breakdown strength,181Brunauer-Emmett-Teller(BET),107Bucky gel,5,84,122Bucky gel actuators,122,276Bucky paper,121Butterfly-inspired biomimetic locomotion,393 BZ reaction,4CCapillary network,455Carbide-derived carbon(CDC),128Carbon black(CB),129Carbon microcoil(CMC),29Carbon nanotubes(CNT),2,121 Cardiomyocytes,12Cardiomyoplasty,448κ-Carrageenan,8Carrageenan(CA),265Catheter,5,410Cation drive,92Cation-driven actuation,293Cationic and anionic volumes,141Cationic surfactant molecules,337C2C12,451Cellular PP,206Chain structure,266Charge transfer,154–155,282Chemical plating method,78Chemical wave,53Chemomechanical system,4Chiral polymer,202Chromophore,7Cis-trans isomerization,7Coil-globule transition,42Coions,281Cole-Cole plot,154,348Collagen,3Colloidal particle,106Complexation,255Compliant electrode,10,177Composite gel,246Composite materials,30Compression modulus,154Condition action rules,341Conducting polymer actuator,19 Conducting polymers,89,293Conductive polymers(CP),2,8,121Conical meniscus,247π-Conjugated polymer,8Constant-voltage grand-canonicalensemble,278Constitutive equation,334Consumer electronics,19–21Contractile force,452Contractile strain,115Contractile stress,113Contraction force,94Contraction type PVC gel actuator,347 Controller,362–364Control system,333Conversion efficiencies,95Cooperative,163Copolymer,163Copolymerization,40Coulomb force,192Counterions,281Crawling,166Creep(ing),99,117Creeping deformation,344Current density,334,335Cyclic voltammograms(CV),157 Cytoskeleton,459Cytotoxicity,417DDamper,248Damping factor,272DE cartridges,436Dedoping,106Deformable machine,331Deformation,142,335Deformation of the gel,335Deformation ratio of DE,183DE Generator system on the buoy,441 Degree of crosslinking,3D-E hysteresis loop,200Desorption,105DE stress-strain performance,434DE transparent Dipole-speakers,438DE vibrators,438Diaphragm pump,9Dibutyl adipate(DBA),344Dielectric breakdown strength,192 Dielectric constant,10,192Dielectric elastomer actuators,19,191 Dielectric elastomers(DEs),10,118,178,343 Dielectric gels,7Dielectric solvent,165–166Diffusion coefficient,40500IndexDimensional change,41Dimethyl sulfoxide(DMSO),166Dipole speakers,436Direct drive,364Dispersibility,30Dispersing/flocculating oscillation,69 Displacement,141Distributed generator applications,185 Dopant,8Doping,106Double-layer charging kinetic model,124 Drug delivery systems,39,410Drug release,263Durability,147Dynamic light scattering,49Dynamic sensors,390EEffect of solvation,96Eigenfunction expansion,306 Eigenvalue problem,306Elastic electrode layers,192Elasticity,94Elastic modulus,145Elastomers,2,10,153,414Electret,206Electrical conductivity,153,334 Electrical double layers(EDLs),278 Electric double layer,303Electric double-layer capacitor(EDLC),137 Electricfield,334Electric impedance measurement,348–350 Electric potential,334Electric power density,112Electroactive polymer(EAP),135,152,410 Electroactive polymer(EAP)actuators,17 Electroactive polymer gel,331 Electroactive polymer gel robots,332 Electroactive soft actuators,275 Electrochemical actuator,237 Electrochemical(EC)-creeping,99 Electrochemical doping,8 Electrochemical kinetic model,124 Electrochemical oxidation,92 Electrochemical reaction,5,159 Electrochemical window,98 Electrochemomechanical deformation(ECMD),92 Electrodeposition,96Electro-discharge machining(EDM),378 Electrohydrodynamic insability,165 Electromagnetic waves,29Electro-mechanical,163Electro-mechanical coupling system,305–307π-Electron,91Electronic EAPs,17Electro-optical,163Electroosmosis,288Electro-osmotic waterflow,80 Electrophoresis,334Electrophoretic polarization,5 Electrophoretic transport,5Electro-rheological,166 Electrospinning,40Electrostatic effect,123Electrostatic force,43Electro-stress diffusion couplingmodel,80,303Emeraldine salt,8Encapsulation,258–259Energy conversion,165,223Energy conversion efficiency,441Energy density,179Energy efficiency,115Energy harvesting,23–24,173Engine,1Entanglement,45Equivalent cantilever beam,391 Equivalent circuit,154Equivalent circuit model,124Ethical and safety issues,3681-Ethyl-3-methylimidazolium bis(trifluoromethylsulfonyl)imide,1521-Ethyl-3-methylimidazolium bis(trifluoromethylsulfonyl)imide([EMI][TFSI]),1521-Ethyl-3-methylimidazoliumtetrafluoroborate(EMIBF4),122 Euler-Bernoulli beam model,304 Extracellular matrix,447FFaradaic mechanism,128Faradic current,156Fast speed of response,178Feedback control,315Ferroelectret,207Ferroelectric,10Ferroelectricity,198Ferroelectric liquid crystal,10 Ferromagnetic,8Ferromagnetic particle,246Field-activated polymers,177Finite element formulation,288Index501Finite element method,294Fish-like microrobot,393Flemion,288Flexible electrode,156Flory-Huggins theory,3Force control,322Forward motion,288Free-ended,337Free volume,7Frequency,159Frequency dependence,124GGait of turtle,380Galerkin method,288Gel,2,415Gel deformation,334Gel-fish,5Gel-looper,5Gel machine,12Gel-pump,262Gel robots,337Gel-valve,264Generative force,146Grafting,29Guide wire,5HHairpin-shape,342Haptics,20Haptic sense,271Harvesting energy,434Heat conduction,49Heat of water condensation,109 Helical structure,98Hierarchical structure,106High energy efficiency,193Highly efficient transduction,434 High strain rate,178Hook law,8Human arm,443Human-machine interface(HMI),197 Hydrodynamic characteristics,246–247 Hydrogel,5,164,237Hydrogen,188Hydrogen bonding,4Hydrogen generation system,444 Hydrolysis,12Hydrophilic,35Hydrophobic,35Hydrophobic interaction,46 Hysteresis loss,192IImage device and image apparatus,19 Immobilization magneticfluid,249Impact sensor,172Inchworch-inspired microrobot,394 Inchworm-inspired crawling and graspinglocomotion,404Inchworm-inspired microrobot,396 Independent of wave period,186Inert chamber system(ICS),464 Information apparatuses,23 Intercalation,282In vitro motility assay,460Ion drag,165Ion-exchange by copper metal,381Ion gels,136Ionic conducting polymer-metalcomposites,287Ionic conductive polymer gelfilms(ICPF),77Ionic conductive polymers,75–84Ionic conductivity,144,156Ionic crosslink,92,100Ionic EAP(i-EAP),17,121Ionic EAP actuator,121Ionic hydrogel,238Ionic liquids(ILs),5,80–81,98,136,153 Ionic polymer actuator,136Ionic polymer conductor network composite (IPCNC),84Ionic polymer gel,334Ionic polymer-metal composite(IPMC),5,75, 121,372,410Ionic polymer metal compositeactuator,19Ionic transport mechanism,140 Ionization,3Isosteric heat of sorption,109Isothermal sorption curve,108JJellyfish-inspired biomimeticlocomotion,392Jellyfish-inspiredfloating/divinglocomotion,404Joule heating,10,93,106KKerr effect,171Ketjen black(KB),137Kharitonov’s theorem,326Kinesin,474,475,480502IndexLLaminatedfilms,230Langmuir’s theory,334Latching mechanism,364–367Leg slippage,400Lens,168Leucocyanide,7Leuco-emeraldine salt,8Leverage actuator,105Light-driven actuator,223Light-volume transduction,212Linear actuators,115,347Liquid-crystalline elastomers(LCEs),10,224 Listeria,478,479Lobster-like microrobot,395,397,404Loss modulus,265Lower critical solution temperature(LCST),4,29,39MMacro azo-initiater,30Macro-fiber composite,207Macroscopic deformation,228Magnetic elastomer,269Magneticfield,8Magneticfluid,246,261Magneticfluid composite gels,249–255 Magneticfluid gels,251–255Magnetic hydrogels,269Magnetic levitation,247–248Magnetic particles,261Magnetic soft material,261 Magnetization,245Magnetorheological effect,268Magneto-rheological function,259 Magnetorheology,269 Magnetostriction,249–251Maxwell stress,10MCM-41(mesoporous silica),129 Measurement circuit of generated energy,185 Mechanical strength,144Mechanism for deformation,141 Mechanisms,275Mechanochemical engine,3 Mechanochemical turbine,3Mechano-electric functions,163Medical devices,409Memory effects,100Mesh electrodes,345Metallic counter cations,80Metal nanoparticles,237Micelle-like,42Microactuators,12Microchannel,218Micro-electro-mechanical system(MEMS),9Microfluidic system,217Micro-nano devices,438 Micropatterned irradiation,216Micro pump,421Microrelief formation,216Micro-soft gripper,168Microtubule/kinesin,459 Microtubules,474,475,480Miniaturized IPMCs,82–83Model,316Modeling,315Molecular alignment,228Molecular assembly reaction,5 Molecular weight,42Monodomain particle,245Monte Carlo simulation,123,276 Morphology,40,43,249–250Mother robot,389Motion,336Motion design,331,333–341Motor,1,11Motor proteins,475,479Multi-functionality,398Muscles,409,4488.5MW of power,441Myogenesis,454Myogenic regulatory factor,454 Myooid,450Myosatellite,449Myosin,12,474,475NNafion,5,137,288Nano-Carbon Actuator,357–369Nanofibers,40National Institute of Advanced Industrial Science and Technology(AIST),357 New generations of devices,433Next-generation DE actuators,445 NMR,141Noble-metal electrodes,75Non-Faradaic mechanism,128Nylons,170OObstacle-avoidance experiments,401 Onsager’s law,295Index503Operating principal of DE power generation, 183,439Operators,337Ordinary differential equations(ODEs),304 Oscillation,165Osmotic pressure,3PPaper actuator,160Paramagnetic property,245Passive,poroelastic behavior,293 Patents,17Percutaneous transluminal coronaryangioplasty(PTCA),411Perfluorocarboxylic acid,7Perfluorosulfonic acid,77Peristaltic motion,55Permanent deformation,400Phase diagram,338–340Phase separation,168Phase transition,5,40,117,164Phase transition temperature,4pH Change,3Photocatalysis,239Photochromism,224 Photocrosslinking,226 Photoelectrochemical actuator,237 Photoinduced proton dissociation,213 Photo-ionization,7 Photoisomerization,211 Photomechanical effect,224Photon mode,219Photo-polymerization,32 Photoresponsive actuators,212 Photoresponsive cell culture surfaces,220 Photoresponsive dehydration,212 Photoresponsive hydrogels,212 Photoresponsive hydrogel sheet,218 Photoresponsive microvalve,218Photo-responsive shrinking,211 Photoresponsive swelling,212 Photothermal effect,227Phydrophilicity/hydrophobicity,7 Physical cross-link,45Physical crosslinking,138PID control,318Piezoelectric actuators,118Piezoelectric polymers,197Piezoelectric tensors,199Plasmon-induced charge separation,242 Plasmon resonance,242Plasticizer,163PLLAfibers,205Pockels effect,171Point generator applications,185Point group theory,199Poisson’s ratio,11,335Polarity,7Polarization,156Polaron or bipolaron,91Poling process,200Poly(3,4-ethylenedioxythiophene)(PEDOT), 91,98,152Poly(acrylamide)(PAAm),3Poly(acrylic acid)(PAA),3Poly(ethylene glycol)(PEG),4Poly(ethylene terephthalate)(PET),170Poly(methacrylic acid)(PMMA),4Poly(methyl methacrylate)(PMMA),138 Poly(methyl methacrylate(MMA)-b-n-butylacrylate(nBA)-b-MMA),167 Poly(N-isopropylacrylamide),53Poly(N-isopropylacrylamide)(PNIPAM),4,39 Poly(vinyl methyl ether)(PVME),4Poly(vinylidenefluoride-co-hexafluoropropylene)(P(VDF-co-HFP)),137Poly(vinylidenefluoride-trifluoroethylene),10 Polyaniline(PANI),8,91,105,129,298 Polycarbonate,193Polydispersity index,41Polyether-segmented polyurethaneurea(PEUU),140Poly(2-acrylamido-2-methylpropane sulfonic acid)gel(PAMPS gel),331 Polyimide,144Poly-ion complex,106Poly-L-lactic acid(PLLA),198,202 Polymer,410actuator,135electrolyte,136fabrication methods,181gels,18,225,246motor,9PolyMuscle,117Poly(3,4-ethylenedioxythiophene)/poly(4-styrenesulfonate)(PEDOT/PSS),9,106Poly(vinylalcohol)-poly(acrylic acid)-poly (allylamine)(PVA-PAA-PAlAm),3 Polypyrrole(PPy),8,91,105,129,293,343 Polystyrene,138Polythiophene(PT),8,91,105504IndexPolyurethane(PU),10,153,269Polyvinyl alcohol(PVA),3,164,262Poly vinyl chloride(PVC),7,164,343 Polyvinylidenefluoride(PVDF),198,200 Polyvinylidenefluoride-co-hexafluoropropylene(PVDF-HFP),122 Porous electrodes,276Porous polypropylene(cellular PP),198 Positioning,99Power density,3Power generation efficiency,441Power generation mode,439Power generation phenomenon,440Precise locomotion,398Preparation process,336,337Pressure-and position-sensors,182 Pressure gradient,80Prestrain,10Primitive model,279Printed actuator,160Printing method,146Proof-of-principle devices,435Properties and performance,181 Proportional-integral-derivative control(PID),318Prosthesis,415Protic ionic liquid(PIL),72Protofilaments,462Ptosis,412Pulsed-field gradient spin-echo(PGSE),140–141Pumps,1,411PVA-DMSO gel,166PVA-NMP gel,171PVA-PAA,4PVC gel actuator,344QQuadruped robot,378–383RRadiation force,7Radius of curvature,335Rajiform swimming,372Rate-determining step,9γ-Ray,4Ray-like robot,373–378Reactive oxygen species(ROS).,464 Redox,157Reduction(or primary plating)process,78Refreshable Braille display,131Relative water vapor pressure,108 Relaxation,159Relaxation phenomenon,310Release control,257–258Remote control,259Reproducibility,117Resonance frequency,272Resorption,111Response speed,147Ring opening and closing,7Robot-hand,5Robotics,22–23Robust,322Robust control,325Rod-like hydrogel,214Role actuators having3-DOF,435Roll-type structure,193Rotation,11Rotational motion,462–463Ruthenium tris(2,20-bipyridine),53SScalpel,412Seal bearing,248Selective gold plating,82Selective plasma treatment,82Self-assembly,12,138Self-deformation,89Self-diffusion,288Self-driven gel conveyer,64Self-oscillatingfluids,68–72Self-oscillating gels,51–72Self-oscillating micelle,71Self-oscillating microgels,58Self-oscillating polymer brushes,67–68Self-propelled motion,63Self-walking gel,60–63Sensor,23–24Sensor grove,435Servo control,321Shape memory,100Shape memory alloy(SMA),117Shape memory polymers,225Short-range proximity sensors,401 Silicone,10Silicone rubber,192Simulation,333,340Single-walled carbon nanotubes(CNTs),5,11 Sizes from micrometers to several meters,182 Skeletal muscle,3,89,113Index505Skin layer,46Slide ring materials(SRM),191Small-angle neutron scattering,49 Small-scale power-generation device,443 Small size brakes,347Smart materials,332Smooth muscle,449Soft actuators,1,17,177Soft segment,164Solventflow,163Sorption degree,108Sorption isotherm,107Specifications of Braille dots,359Specific surface area,107Spherical robot,388Sphincter,412Spirobenzopyrane,7Spiropyran,212State equation,305State space model,305Stearyl acrylate(SA),40 Stereolithography,453Stick insect-inspired two-phase walking locomotion,404Stirling engine,187Storage modulus,8,265Strain difference,123Streptavidin,460Stress relaxation,324Sulfonated polyimide,144Super artificial muscle,187 Supercritical CO2,204Super-growth,127Super-growth CNT,368Super-paramagnetism,246Supra-macromolecular,478–480 Surface stress,335Surface stress and strain,335Surface tension,43Surfactant,334Surfactant molecules,334Swelling of the interface,247Swelling ratio,30TTacking,170Tactile display,9Tendons,451Terpyridine(tpy),70 Tetrahydrofuran(THF),344The correlation effect,282The electrical double layer,123The electrostatic interaction,279The Guoy-Chapman theory,282Thermal expansion,112Thermal-mode,212 Thermodynamics,276Thermo-sensitive polymer gels,29The structure of the direct drive type,359 The volume exclusion interaction,279 Three-layered,122Time constant(CR),126Tissue engineering,448Touch sensor,165Tracking controller,319Training,100Training effect,94Transducer,89,248Transference numbers,141Transition process,336,337 Transmittance,42Traveling wave,374–377Treadmilling,474–479Tri-block copolymer,167,204 Triboelectric series,173Tubulin,460Turning over,336Typical scope trace,185UUltra-light and thin Braille display,131 Underwater monitoring operations,388 Unimorph,8Utility function,333VVapor grown carbonfiber(VGCF),127,137 Variable texture surfaces,438Variable viscoelasticity,265–272 Vibration damping,21Vibration device,195Viscosity oscillation,68–70Voltage of electrodes,335Volume exclusion effect,123WWarburg impedance,155Water mill device,442Water vapor,93,96,109Water vapor sorption,106Wearing assist garments with variablestiffness,347506IndexWelfare device,193 Wet-process,160White-box modeling,316 Wireless network,443 Work capacity,115YYamaue’s model,303–304 Yarns,11Young’s modulus,10,94,114,335Index507。

8CARACTERÍSTICAS• Clasificación 1000 V CAT IV (Modelos 403/603 y 405/605)• UL 94 VI retardo de inflamación y auto extinguible• Pantalla electroluminiscente azul de 10000 cuentas (para las series 400 y 600) y de 6000 cuentas (para las series 200) con retroiluminación• Mide hasta 1000 V CA (1400 V pico), 1000 V CC y CA+CC con resolución hasta 10 mV• Mide hasta 2000 A CA y 3000 A CC (dependiendo del modelo)• Mide potencia monofásica y trifásica (real, reactiva y aparente) hasta 3 MW con resolución de 1 W (dependiendo del modelo)• Mediciones W, VA, var y PF para sistemas equilibrados monofásicos y trifásicos (modelos 205, 405 y 605)• Mide la frecuencia hasta 20 kHz con resolución de 0,1 Hz • Selección automática de medición CA o CC• Medición True InRush ® (de corriente de irrupción efectiva) con captura de 100 ms• Abertura de pinza hasta 34 mm (1,34 pulg.) (serie 200), 48,0 mm (1,89 pulg.) (serie 400) y hasta 59,9 mm (2,36 pulg.) (serie 600)•Termopar tipo K y adaptador incluido (Modelos 203, 403 y 603)2139.12Medidor de pinza modelo 203 (TRMS, 1000 V /, 600 A CA /900 A , ohmios, continuidad, temperatura)2139.21Medidor de pinza modelo 403 (TRMS, 1000 V CA /CC , 1000 A CA /1500 A CC , rotación de fase, ohmios, continuidad, temperatura)2139.31Medidor de pinza modelo 603 (TRMS, 1000 VCA /CC , 2000 A CA /3000 ACC , ohmios, continuidad, temperatura)2139.40Medidor de pinza modelo 205 (TRMS, 1000 V CA/CC , 600 ACA /900 A CC , ohmios, continuidad, rotación de fase, potencia, THD)2139.50Medidor de pinza modelo 405 (TRMS, 1000 V CA /CC , 1000 A CA /1500 A CC , ohmios, continuidad, potencia, THD)2139.60Medidor de pinza modelo 605 (TRMS, 1000 V CA /CC , 2000 A /3000 A , rotación de fase, ohmios, continuidad, potencia, THD)INCLUYEPara una lista de accesorios incluidos visite nuestro sitio de internet o consulte el manual del usuario del instrumento.Consulte con fábrica sobre precios de calibración NIST.MODELOS 203/403/603 Y 205/405/605Alto grado de seguridad para losusuarios de medidores de clasificación 1000 V CAT IV (dependiendo del modelo)203205403603605405。