TM4C123G定时器
- 格式:pdf
- 大小:551.77 KB
- 文档页数:18


定时器的原理和应用场景1. 定时器的原理定时器是一种可以精确测量时间间隔的设备或模块,常见于电子设备和计算机系统中。
它的主要原理是利用计时器或计数器来记录时间的流逝。
定时器可以以固定的时间间隔生成中断信号,从而触发某些特定的操作或任务。
定时器的计时原理可以分为两类:1.1 硬件定时器硬件定时器是指在计算机系统或嵌入式系统的硬件电路中实现的定时功能。
它通常由一个晶振或其他精确时钟源提供时钟信号,通过计数器或递增器记录时间的流逝。
硬件定时器具有高精度和可靠性,适用于需要精确计时的应用场景。
硬件定时器常见的应用包括:•时钟控制:用于生成系统的时钟信号,保证各个模块的同步运行。
•脉冲宽度调制(PWM):用于控制电机驱动、LED亮度调节等需要周期性高精度控制的场合。
•外部设备控制:用于与外部设备进行通信和数据采集,如串口通信、闪光灯控制等。
1.2 软件定时器软件定时器是指在软件程序中通过编程实现的定时功能。
它通常利用系统提供的定时中断机制,通过调用系统的定时服务或编写定时任务来实现定时功能。
软件定时器的精度和稳定性相对较低,但应用范围广泛,适合于一些对时间要求不高的场景。
软件定时器常见的应用包括:•定时任务执行:如定时检测传感器数据、定时更新缓存等。
•软件延时:用于控制程序执行的时间间隔或等待一定时间后再执行某些操作。
•定时触发事件:如定时发送邮件、定时备份数据等。
2. 定时器的应用场景定时器在各个领域和行业中都有广泛的应用,下面列举了一些常见的应用场景:2.1 嵌入式系统在嵌入式系统中,定时器广泛应用于各种控制和通信任务。
嵌入式系统中的硬件定时器可以用于处理实时任务、设备控制、数据采集等。
软件定时器可以用于轮询任务、时序控制、通信协议等。
2.2 物联网在物联网应用中,定时器被广泛用于传感器数据采集、数据传输、设备控制等。
通过定时器可以实现模块化的时间调度和控制,提高系统的稳定性和可靠性。
2.3 通信系统通信系统中的定时器用于处理数据传输和通信协议。

定时计数器的四种工作方式在单片机中有两个特殊功能寄存器与定时/计数有关,这就是TMOD和TCON。
顺便说一下,T MOD和TCON是名称,我们在写程序时就能直接用这个名称来指定它们,当然也能直接用它们的地址89H和88H来指定它们(其实用名称也就是直接用地址,汇编软件帮你翻译一下而已)。
从图1中我们能看出,TMOD被分成两部份,每部份4位。
分别用于控制T1和T0,至于这里面是什么意思,我们下面介绍。
从图2中我们能看出,TCON也被分成两部份,高4位用于定时/计数器,低4位则用于中断(我们暂不管)。
而TF1(0)我们上节课已提到了,当计数溢出后TF1(0)就由0变为1。
原来TF1(0)在这儿!那么TR0、TR1又是什么呢?看上节课的图。
希望大家常来本站学习单片机相关知识计数脉冲要进入计数器还真不不难,有层层关要通过,最起码,就是TR0(1)要为1,开关才能合上,脉冲才能过来。
因此,TR0(1)称之为运行控制位,可用指令SETB来置位以启动计数器/定时器运行,用指令CLR来关闭定时/计数器的工作,一切尽在自已的掌握中。
<单片机定时器/计数器结构>定时/计数器的四种工作方式工作方式0定时器/计数器的工作方式0称之为13位定时/计数方式。
它由TL(1/0)的低5位和TH(0/1)的8位组成13位的计数器,此时TL(1/0)的高3位未用。
我们用这个图来讨论几个问题:M1M0:定时/计数器一共有四种工作方式,就是用M1M0来控制的,2位正好是四种组合。
C/T:前面我们说过,定时/计数器即可作定时用也可用计数用,到底作什么用,由我们根据需要自行决定,也说是决定权在我们��编程者。
如果C/T为0就是用作定时器(开关往上打),如果C/T为1就是用作计数器(开关往下打)。
顺便提一下:一个定时/计数器同一时刻要么作定时用,要么作计数用,不能同时用的,这是个极普通的常识,几乎没有教材会提这一点,但很多开始学习者却会有此困惑。

四线定时器工作原理
四线定时器(555)是一种常用的集成电路,它是由美国昇陽半導體公司(Signetics Corporation,现在的Philips半导体公司)于1972年开发的。
由于其稳定性好、工作可靠、应用广泛,被誉为集成电路中的“百搭王”。
四线定时器主要由电压比较器、RS触发器、输出级组成。
它的脚位分为8个引脚,其中2、6脚分别连接外部的电容、电阻,从而构成了一个RC震荡电路。
具体来说,当电容器充电至2/3VCC(正电源电压)时,输出为低电平;当电容器放电至1/3VCC时,输出为高电平。
也就是说,通过改变电容和电阻的值,就可以调节555芯片的输出频率和工作模式。
四线定时器可以设置单稳态和多稳态两种工作方式。
单稳态工作模式下,只产生一次输出脉冲,输出时间的长短由电容和电阻决定;多稳态工作模式下,则可以产生连续不断的输出波形,输出频率的大小也由电容和电阻决定。
除了以上两种基本的工作模式外,四线定时器还有一种脉冲宽度调制(PWM)的工作模式。
脉冲宽度调制就是根据输入信号的幅度和频率来改变输出脉冲的占空比。
在这种工作模式下,555输出脉冲的占空比与输入信号的频率成反比,与输入信号的幅度成正比。
总之,四线定时器的工作原理是通过外部导入的电容和电阻来调节内部的RC震荡电路,从而产生不同频率、不同角度和不同幅度的输出信号。
在电子电路设计中,四线定时器是一种非常实用的IC,广泛应用于计时、脉冲发生、频率测量等方面。

tm4c123gxladcdma例程摘要:1.简介2.例程概述3.例程实现步骤4.总结正文:【简介】本文将介绍一个名为“tm4c123gxladcdma”的例程,它是基于德州仪器(TI)的C55x DSP 的DMA(直接内存访问)功能的实现。
该例程展示了如何使用DMA 引擎在TI 的C55x DSP 上实现数据传输。
【例程概述】“tm4c123gxladcdma”例程是TI 提供的一个用于演示其C55x DSP 的DMA 功能的示例程序。
它通过DMA 引擎实现数据从内存传输到DSP 的串行外设接口(SPI)设备。
这个例程主要分为以下几个部分:1.配置DMA 引擎:设置DMA 通道、内存地址、传输方向等参数,以便正确实现数据传输。
2.配置SPI 设备:设置SPI 时钟频率、模式、数据长度等参数,以确保SPI 设备能够正确接收和发送数据。
3.初始化数据缓冲区:分配内存空间用于存储待传输数据,并初始化数据缓冲区。
4.启动DMA 传输:将数据从内存传输到SPI 设备,实现数据传输的功能。
【例程实现步骤】1.配置DMA 引擎:a.设置DMA 通道:根据需要选择一个空闲的DMA 通道。
b.设置内存地址:指定数据缓冲区的内存地址。
c.设置传输方向:设置数据传输方向,如从内存到外设。
d.设置传输长度:设置要传输的数据长度。
2.配置SPI 设备:a.设置SPI 时钟频率:根据实际需求配置SPI 时钟频率。
b.设置SPI 模式:配置SPI 通信模式,如主模式或从模式。
c.设置数据长度:设置要传输的数据长度。
3.初始化数据缓冲区:a.分配内存空间:为数据缓冲区分配内存空间。
b.初始化数据缓冲区:将待传输数据填充到数据缓冲区。
4.启动DMA 传输:a.使能DMA 传输:设置DMA 传输使能位。
b.启动DMA 传输:通过设置DMA 传输启动位,启动数据传输过程。
【总结】本文介绍了“tm4c123gxladcdma”例程,它是基于TI 的C55x DSP 的DMA 功能的实现。

微电脑全智能控制器TMC-4全自动测控仪740)this.width=740" align=right border=undefined>【主要技术指标】1、使用电源:220VAC功耗:,5W2、测温精度:?2?3、测温范围:0-99?4、水位分档:五档5、可控水泵或电热带功率:,500W6、电磁阀参数:直流DC12V,可选用有压阀或无压阀,有压阀工作压力:0.02Mpa~0.8Mpa,适用于直供水无压阀工作压力:0.0Mpa,适用于水箱供水或低水压供水。
【主要功能】开机自检:开机时发出"嘀"提示音,表示机器处于正常状态。
水位预置:可预置加水水位50、80、100%水温指示:显示太阳能热水器内部实际水温。
水位指示:显示太阳能热水器内部所存水量。
缺水报警:当水位从高变低,出现缺水状态时,蜂鸣报警,同时20%水位闪烁。
缺水上水:当水位从高变低,出现缺水状态时,延时15分钟自动上水至预置水位。
温控上水:当水箱未加满,水温双偏高时(水温在60?-100?之间),自动补水至合适水温50?左右,此功能可防止出现低水量、高水温的不合理现象。
当正在用水(水位发生变化)时,或连续按住(上水)键不松手,听到"嘀"短促提示音后,是延长60分钟启动,以避免用户正在用水启动上水。
手动上水:当水位低于预置水位时,按上水键,可实现手动上水至预置水位;若水位已达到预置水位,则在原水位基础上再加一档;若水位已加满至100%,则停止手动上水,在上水过程中按(上水)可停止上水。
定时上水:利用定时键,可设定定时上水时间,实现定时上水。
强制上水:水位传感器出现故障时,可按(上水)键,实现强制上水,每分钟会出现蜂鸣提示,注意有无溢水,8分钟后自动关闭上水。
低水压上水:在上水过程中,水压过低或停水,测控仪会自动进入低水压模式,(低水压)图案点亮,并报警。
在此上水模式中,测控仪会间隔30分钟启动上水,若30分钟内仍不能使水位上升一档,则停止30分钟,然后再启动上水,反复循环运行,并连续监测水箱是否超高温直至水位上升,水箱水位超过80%或上满,以避免在低水压或停水时发生以下严重后果:1、电磁阀、水泵长期通电运行,造成水泵空转烧毁;2、由于太阳能真空管破裂或其它原因漏水,造成不断上水而水箱、屋顶长期流水;3、停水后,突然来水,由于空晒,太阳能水箱温度过高,而造成炸管。

定时器的原理与应用1. 定时器的概述定时器是一种计时器装置,用于测量和显示时间间隔或时间长度。
在现代电子设备中,定时器被广泛应用于各个领域,包括电子钟表、计时器、闹钟、计数器等等。
本文将介绍定时器的工作原理以及它在不同领域中的应用。
2. 定时器的工作原理定时器的工作原理基于计时的基本原理,即通过一定的脉冲计数来实现对时间的测量。
以下是定时器工作的基本流程:•初始化:定时器内部的计数器被初始化为零。
•启动计时器:定时器开始接收脉冲输入,并开始计数。
•计数:定时器持续接收脉冲输入,每接收一个脉冲计数器就加一。
•到达设定时间:当定时器内部的计数值达到设定的时间或时间间隔时,定时器会触发一个中断信号或执行特定的操作。
3. 定时器的应用领域3.1 电子钟表定时器在电子钟表中起到关键作用。
对于数字钟表而言,定时器被用来计时后显示当前的时间。
它通过持续计数脉冲输入来测量时间的经过,并将计数值转换为时、分、秒的格式进行显示。
3.2 计时器计时器是一种常见的应用场景,比如厨房计时器、赛车计时器等。
定时器通过设定初始时间并开始计时,当计时时间达到设定时间时,会发出提醒信号,提醒用户事件已经过去。
3.3 闹钟定时器也被广泛应用于闹钟中。
闹钟通过定时器实现时间的设定和报警功能。
用户可以设定闹铃的触发时间,定时器在设定时间到达时触发蜂鸣器或震动器等报警装置,以提醒用户起床或进行其他活动。
3.4 计数器定时器的另一个重要应用是计数器。
计数器通过定时器来记录事件的次数或进行频率测量。
它可以用来测量物体通过传感器的次数、统计人数、计算测速等。
3.5 其他应用领域除了上述应用领域之外,定时器还被广泛应用于许多其他领域,比如自动控制系统、工业生产、科学实验等。
在这些领域中,定时器常常用来进行任务调度、数据采集、时间同步等重要操作。
4. 总结定时器是一种广泛应用于电子设备中的计时器装置。
它基于计数的原理,通过持续计数脉冲输入来进行时间的测量。

托罗TMC424控制器说明书TMC424控制器说明书1:产品概述1.1 产品介绍TMC424控制器是由托罗公司研发的一款高性能电机控制器,用于控制步进电机和直流电机的运动。
该控制器具有丰富的功能和稳定的性能,适用于各种工业自动化应用。
1.2 主要特性- 支持步进电机和直流电机的控制- 高精度运动控制- 支持多种通信接口- 强大的保护功能- 简单易用的操作界面2:控制器安装2.1 硬件连接在安装TMC424控制器之前,请确保已经完成以下硬件连接:1) 将控制器与电源进行连接2) 将控制器与电机进行连接3) 完成所有其他必要的外部设备连接2.2 软件配置在进行控制器安装之前,需要进行相关的软件配置。
具体的步骤如下:1) 并安装控制器配置软件2) 打开配置软件,并根据实际需求进行相应的配置3) 将配置保存到控制器中3:控制器操作3.1 控制器界面TMC424控制器提供了一个简单易用的操作界面,用户可以通过该界面进行各种操作和设置。
主要界面包括:- 运动控制界面:用于设置电机的运动参数和控制模式- 通信设置界面:用于设置控制器的通信接口和参数- 保护设置界面:用于设置控制器的保护功能和参数3.2 运动控制TMC424控制器支持多种运动模式,用户可以根据实际需求选择合适的模式进行控制。
常用的运动控制包括:- 位置控制:通过设置目标位置,让电机运动到指定位置 - 速度控制:通过设置目标速度,让电机以指定速度运动 - 加减速控制:通过设置加速度和减速度,让电机按照指定的加减速度进行运动4:控制器通信4.1 通信接口TMC424控制器支持多种通信接口,包括:- RS232:用于与计算机或其他设备进行串口通信- RS485:用于与多个控制器之间进行串口通信- CAN总线:用于与其他CAN设备进行通信- 以太网:用于与局域网或互联网进行通信4.2 通信配置在使用控制器进行通信之前,需要进行相应的通信配置。
具体的配置步骤如下:1) 打开通信设置界面,选择合适的通信接口2) 配置通信参数,包括波特率、数据位、停止位等3) 测试通信连接,确保与其他设备的通信正常5:控制器保护5.1 保护功能TMC424控制器具有多项保护功能,包括:- 过流保护:当电机运行时,控制器会监测电流是否超过设定值,如果超过则会自动停机- 过温保护:当控制器内部温度超过设定值时,会自动停机并进行散热- 过压保护:当外部电压超过设定值时,控制器会自动停机,以保护电机和控制器5.2 保护参数设置用户可以根据实际需要进行保护参数的设置,包括: - 过流保护阈值:可以根据电机的额定电流进行设置- 过温保护阈值:根据控制器的额定温度进行设置- 过压保护阈值:根据电机和控制器的额定电压进行设置6:附录6.1 附件清单本文档附带以下附件:- 控制器配置软件- 控制器通信接口说明书- 控制器保护参数设置表6.2 法律名词及注释- RS232:一种串行通信接口标准,用于计算机与外部设备之间的通信。



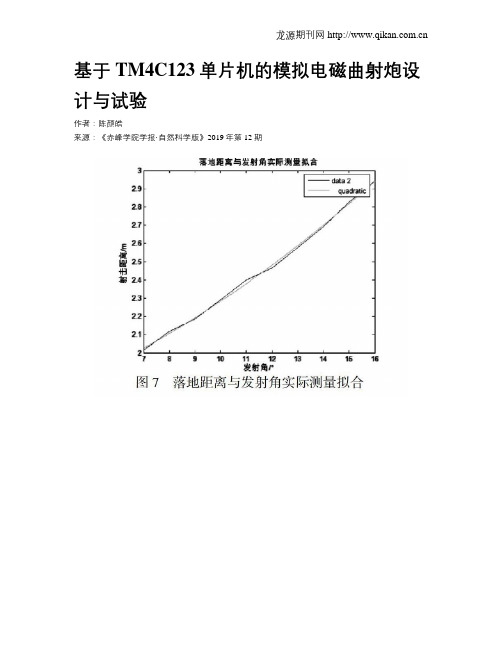
基于TM4C123单片机的模拟电磁曲射炮设计与试验作者:陈颜皓来源:《赤峰学院学报·自然科学版》2019年第12期摘要:基于2019年全国大学生电子设计竞赛中H题“模拟电磁曲射炮”的任务要求,设计了模拟电磁炮自动控制系统.系统以TI公司的TM4系列单片机作为电磁炮的控制核心,采用LDX-218数字舵机驱动云台.可实现通过串口屏输入射击距离和偏转角;通过激光测距结合OpenMV摄像头的图像处理捕获引导标识从而对电磁炮进行智能控制.3个基本要求测试任务全部完成,3个发挥部分测试任务部分完成,作品获得该次竞赛江苏省二等奖.关键词:电磁炮舵机云台;TM4;OpenMV摄像头中图分类号:TP27;O441 ;文献标识码:A ;文章编号:1673-260X(2019)12-0045-040 引言全国大学生电子设计竞赛(National Undergraduate Electronics Design Contest)(以下简称电赛),是教育部和工业和信息化部共同发起的大学生学科竞赛之一,是面向大学生的群众性科技活动,目的在于推动高等学校促进信息与电子类学科课程体系和课程内容的改革[1].竞赛的特点是与高等学校相关专业的课程体系和课程内容改革密切结合,以推动其课程教学、教学改革和实验室建设工作.2019年全国大学生电子设计竞赛中,H题的任务是自行设计并制作一个模拟电磁曲射炮(以下简称电磁炮),炮管应采用线圈炮,水平方位及垂直仰角方向可调节,用电磁力将弹丸射出,击中目标环形靶和引导标识(以下简称标靶),发射周期不得超过30秒.电磁炮由直流稳压电源供电,电磁炮系统内允许使用容性储能元件.基础要求是电磁炮能做到通过输入设备设定目标的距离和或距离和水平偏转角,并发射炮弹.发挥部分是:(1)一键启动,电磁炮能在30s内找到偏离中心-30°至30°的红色标靶,测定距离并发射炮弹;(2)一键启动,电磁炮能在10s内找到偏离中心-30°至30°,距离250cm的红色标靶,并在运动过程中发射炮弹.以完成任务的情况和击中环形靶的环数得分.1 系统结构与工作原理系统总体上分为两部分:通过电磁继电器控制的电磁炮充能和发射电路系统和单片机的云台控制系统,在提高部分结合摄像头图像处理和激光测距模块.电磁炮充能系统控制由直流升压模块和大容量电容组成,用继电器和可控硅实现单片机对电路的控制.云台控制系统由单片机控制两个舵机,图像处理对摄像头返回的图像做二值化操作并且捕获红色标靶的中心坐标,待云台旋转至正对靶心时,激光模块测定标靶的距离并转换为靶心的距离.通过大量计算和测量拟合出充电时间、发射角和落点的关系,并依据拟合的函数确定充电时间和发射角.2 系统硬件选择与电路设计2.1 微处理器单元采用TI公司的TM4系列单片机,32位ARMRCortexTM-M4 80 MHz处理器内核,带有系统定时器,集成嵌套向量中断控制器,带时钟门控的唤醒中断控制器,存储器保护单元,IEEE754兼容的单精度浮点单元,嵌入式跟踪宏和跟踪端口,系统控制块和Thumb-2指令集.2.2 测距距离单元采用tof激光传感器[2].tof激光模块可以实现3-60米误差0.1cm的测量范围和精度效果远超一般激光模块以及超声波模块.并且处理方式也比较简单,读取信息时直接返回距离而非AD 值,缺点是成本较高.2.3 图像处理单元采用OpenMV摄像头.OpenMV通过mircopython编程,封装极其完善,具有完整的图像处理库和单片机驱动库.OpenMV的二值化处理的阈值是从LAB颜色空间确定的[3],对环境光干扰的抗性较差,但是其配件能够减小这种影响.并且在加装长焦镜头后,靶标在OpenMV画面中所占的画幅明显大于常见的树莓派摄像头.2.4 显示及输入单元采用3.5寸HMI串口屏.HMI串口屏具有完善的图形化上位机,并且搭载stm32微处理器,可以进行一定程度的开发,比如逻辑处理、定时器等.3.5寸触摸电容屏,既可以显示系统当前参数,又可以完美代替矩阵键盘的输入功能.2.5 整体电路的设计电路以TM4单片机为核心,从串口屏、激光测距模块、OpenMV获取信息,控制舵机云台瞄准和发射电磁炮.3 软件系统的设计根据题目要求软件部分主要实现串口屏的和OpenMV设置和显示.串口屏实现功能:选择当前得题目;在基础要求中,距离值d和旋转角α;在发挥部分第三题,通过按钮选择指定数字.OpenMV实现功能:在发挥部分第一题识别红色标靶得靶心,返回云台运动方向,并在靶心处于画面中央时返回开火信息;在发挥部分第二题,计算提前量并返回开火信息.4 系统理论分析与计算Satapathy和McNab等根据8MJ电磁发射弹丸的实际外形尺寸建立了相应的计算流体力学(Computational Fluid Dynamics, CFD)模型[4],并利用此模型解算获取不同马赫数条件下的气动参数.4.1 电磁炮电力电子系统的理论分析与计算超级电容与电池储能的明显区别在于充、放电过程中发生的显著端电压变化[5].RC充电电路的时间常数τ=RC,充电时:4.2 炮弹发射与弹道理论分析与计算任何自由剛体的运动,都可以看作是刚体的质心运动和围绕质心两种运动的合成[6].已知电容C=680?滋F,炮弹直径r=10mm,炮弹为铁质,炮口离地高度为h=15cm.4.3 基于实际测试结果的曲线拟合曲线拟合又称作函数逼近,是求近似函数的一类数值方法[7].通过基于实际测试结果拟合的曲线,我们可以得到更切合实际的弹道参数,从而增加电磁炮发射的精准度.实际测试充满电的情况下,发射角和落地距离的测试结果(数据).由理论计算,可以得知在发射角处于5°-17°时,整体曲线趋向于二次函数[8].故使用MATLAB拟合的图像如图7.函数表达式为:y=0.0043*x2-0.0064*x+1.94 实验与分析4.1 测试条件与仪器测试时间:8月9日21:00;测试地点:实验室;测试地点环境温湿度:温度30℃,湿度51%;测试地点环境风向:无.4.2 测试方案测试每道题的落点环数.基础部分第一题测试5次,指定距离分别为250cm,240cm,280cm,270cm,250cm,结果分别为8环,9环,9环,10环,9环;基础部分第二题测试5次,指定距离、角度分别为220cm、15°,250cm、13°,280cm、25°,270cm、-20°,260cm、-15°,结果分别为7环,9环,9环,8环,9环;发挥部分第一题,随意摆放五个不同位置,结果分别为8环,6环,7环,8环,8环;发挥部分第二题,随意摆放五个不同位置,结果分别为6环,7环,7环,8环,8环;4.3 实际比赛情况实际比赛中,电磁炮系统完成了基本要求部分的全部任务,分别为9环和4环;部分完成了发挥部分要求,获得7环和4环.最终获得江苏赛区二等奖,验证了电磁炮自动控制系统设计的合理性.但是,由于在设计时没有考虑到环形靶的厚度,在面对实际测试场地的带有一定厚度的环形靶时,出现了精度大幅下降的情况,严重影响了实际测评的结果,需要进一步优化.5 结论与讨论该设计采用TM4C123作为主控芯片的微处理器,设计并制作了模拟电磁曲射炮自动控制系统,完成了个单元的硬件电路选型以及软件的设计.较好地实现了图像处理、距离测量、自动击发等要求,达到预期设计目的.参考文献:〔1〕廖杰,李旭,陈熵,刘成鑫,谭宁宁,巫帮锡.双旋翼飞行器升降控制系统设计与试验[J/OL].机电工程技术,2019(08):103-107[2019-09-15].http:///kcms/detail/44.1522.TH.20190823. 1532.076.html.〔2〕迎九.第二代FlightSense的ToF激光测距的工程设计考量[J].电子产品世界,2016,23(09):21-24.〔3〕邹浩,郭雨婷,李佳盈,高雁凤,许素安,陈锡爱.基于OPENMV的色彩引导机器人系统研究[J].科技资讯,2018,16(25):85-86.〔4〕Satapathy S S, McNab I R, Erengil M E, et al.Design of an 8-MJ integrated launch package[C]. Proceedings of 12th Symposium on Electromagnetic Launch Technology, 2005:405-410.〔5〕张慧妍,程楠,景阳.超级电容器储能系统的应用研究综述[J].电力电子技术,2011,45(12):51-53.〔6〕李湘平,鲁军勇,冯军红,李开,杜佩佩.电磁发射弹丸飞行弹道仿真[J].国防科技大学学报,2019(04):25-32.〔7〕趙久奋,唐勤洪,史绍琨.基于曲线拟合的通用仿真弹道设计方法研究[J].战术导弹技术,2019(03):53-58.〔8〕唐勇,费付聪,周延怀.自制演示型电磁炮及其相关研究[J].物理教师,2015,36(01):47-48.。

tm4c定时器事件触发方式
TM4C 是一款基于 ARM Cortex-M4 的微控制器,由德州仪器(Texas Instruments)制造。
在TM4C系列微控制器中,定时器(Timer)模块是一个非常重要的功能模块,它可以用于产生时间基准、产生PWM波形、测量时间间隔等。
在TM4C微控制器中,定时器的事件触发方式主要有以下几种:
1. 定时器溢出事件(Timer Overflow Event):当定时器的计数值达到其最大值(通常是65535对于16位定时器)时,会发生溢出事件。
这个事件可以用来重置定时器,或者触发其他的中断服务程序。
2. 定时器匹配事件(Timer Match Event):当定时器的计数值达到预设的值(通常称为匹配值)时,会发生匹配事件。
这个事件可以用来产生PWM 波形,或者触发其他的中断服务程序。
3. 定时器更新事件(Timer Update Event):当定时器的计数值被软件清零时,会发生更新事件。
这个事件可以用来触发其他的中断服务程序。
4. 外部输入事件(External Input Event):如果定时器模块配置为外部输入模式,那么当外部输入信号的电平发生变化时,会发生外部输入事件。
这个事件可以用来触发其他的中断服务程序。
这些事件都可以配置为产生中断,以便在事件发生时执行特定的代码。
在TM4C微控制器中,可以使用NVIC(Nested Vectored Interrupt Controller)来管理这些中断。

The Tiva C Series TM4C123G LaunchPad Evaluation Kit (EK-TM4C123GXL) is a low-cost evaluation platform for ARM ® Cortex™-M4F based microcontrollers. The Tiva C Series LaunchPad design highlights the T M4C123GH6 microcontroller’s USB 2.0 Device interface, Hibernation module, Motion Control PWMs and overall cost effectiveness. The Tiva C Series LaunchPad also features programmable user buttons and an RGB LEDfor custom applications. The stackable head-ers of the Tiva C Series TM4C123G Launch-Pad BoosterPack XL interface demonstrate how easy it is to expand the functionality of the C Series LaunchPad when interfacing to other peripherals with MSP430™ and other TI MCU B oosterPacks.Kit contents• T iva C Series LaunchPad Evaluation Kit (EK-TM4C123GXL)• O n-board In-Circuit Debug Interface (ICDI)• USB Micro-B plug to USB-A plug cable • README First documentTiva ™C Series TM4C123G LaunchPad Evaluation KitTiva C Series TM4C123G LaunchPad evaluation kit© 2013 Texas Instruments IncorporatedSPMT281AFeatures• T iva C Series TM4C123GH6 microcontroller• USB Micro-AB connector • D evice mode default confi guration•H ost/OTG modes supportable • RGB user LED• Two user switches (application/wake)• A vailable I/O brought out to headers on a 0.1" grid • O n-board In-Circuit Debug Interface (ICDI)• Switch-selectable power sources • I CDI • U S B Device • Reset switch• Preloaded RGB quickstart application • S upported by TivaWare™ for C Series software including the USB library and the peripheral driver library • T iva C Series TM4C123G LaunchPad BoosterPack XL interface whichfeatures stackable headers to expand the capabilities of the 40-pin Tiva C Series LaunchPad evaluation platformThe 40-pin Tiva C Series LaunchPad also featuresstackable headers.For a complete list of availableBoosterPacks that can be used with the Tiva C Series LaunchPad, see:/tm4c123g-launchpadThe platform bar, MSP430, Tiva and TivaWare are trademarks of Texas Instruments. All other trademarks are the property of their respective owners.IMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,enhancements,improvements and other changes to its semiconductor products and services per JESD46,latest issue,and to discontinue any product or service per JESD48,latest issue.Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All semiconductor products(also referred to herein as“components”)are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its components to the specifications applicable at the time of sale,in accordance with the warranty in TI’s terms and conditions of sale of semiconductor products.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by applicable law,testing of all parameters of each component is not necessarily performed.TI assumes no liability for applications assistance or the design of Buyers’products.Buyers are responsible for their products and applications using TI components.To minimize the risks associated with Buyers’products and applications,Buyers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any patent right,copyright,mask work right,or other intellectual property right relating to any combination,machine,or process in which TI components or services are rmation published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.Buyer acknowledges and agrees that it is solely responsible for compliance with all legal,regulatory and safety-related requirements concerning its products,and any use of TI components in its applications,notwithstanding any applications-related information or support that may be provided by TI.Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which anticipate dangerous consequences of failures,monitor failures and their consequences,lessen the likelihood of failures that might cause harm and take appropriate remedial actions.Buyer will fully indemnify TI and its representatives against any damages arising out of the use of any TI components in safety-critical applications.In some cases,TI components may be promoted specifically to facilitate safety-related applications.With such components,TI’s goal is to help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and requirements.Nonetheless,such components are subject to these terms.No TI components are authorized for use in FDA Class III(or similar life-critical medical equipment)unless authorized officers of the parties have executed a special agreement specifically governing such use.Only those TI components which TI has specifically designated as military grade or“enhanced plastic”are designed and intended for use in military/aerospace applications or environments.Buyer acknowledges and agrees that any military or aerospace use of TI components which have not been so designated is solely at the Buyer's risk,and that Buyer is solely responsible for compliance with all legal and regulatory requirements in connection with such use.TI has specifically designated certain components as meeting ISO/TS16949requirements,mainly for automotive use.In any case of use of non-designated products,TI will not be responsible for any failure to meet ISO/TS16949.Products ApplicationsAudio /audio Automotive and Transportation /automotiveAmplifiers Communications and Telecom /communicationsData Converters Computers and Peripherals /computersDLP®Products Consumer Electronics /consumer-appsDSP Energy and Lighting /energyClocks and Timers /clocks Industrial /industrialInterface Medical /medicalLogic Security /securityPower Mgmt Space,Avionics and Defense /space-avionics-defense Microcontrollers Video and Imaging /videoRFID OMAP Applications Processors /omap TI E2E Community Wireless Connectivity /wirelessconnectivityMailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2013,Texas Instruments Incorporated。

tm4c123gxladcdma例程
【实用版】
目录
1.TM4C123GXL 的概述
2.TM4C123GXL 的 ADC 功能
3.TM4C123GXL 的 DMA 功能
4.TM4C123GXL 的例程应用
正文
一、TM4C123GXL 的概述
TM4C123GXL 是一款高性能的微控制器,广泛应用于各种嵌入式系统中。
它集成了丰富的外设接口,如 ADC(模数转换器)、DMA(直接内存访问)等,使得数据采集和传输更加便捷。
二、TM4C123GXL 的 ADC 功能
ADC 是模拟信号转换为数字信号的重要设备,对于嵌入式系统而言,它直接影响到系统的数据处理精度。
TM4C123GXL 的 ADC 功能支持多种采样模式,可以根据实际应用场景进行选择。
同时,它还支持单次转换和连续转换两种模式,方便用户根据需要进行配置。
三、TM4C123GXL 的 DMA 功能
DMA 是一种高速的数据传输方式,可以直接将数据从内存传输到外设,无需 CPU 参与,大大提高了数据传输的效率。
TM4C123GXL 的 DMA 功能支持多种数据传输模式,如单向传输、双向传输等,可以根据实际应用需求进行选择。
四、TM4C123GXL 的例程应用
在了解了 TM4C123GXL 的 ADC 和 DMA 功能后,我们可以通过例程
来进行实际应用。
在例程中,我们首先需要配置 ADC 和 DMA 的相关参数,然后启动 ADC 进行数据采集,采集到的数据通过 DMA 传输到指定的内存区域,最后通过中断或轮询的方式获取数据。

TEXAS INSTRUMENTS-预告信息Tiva™ TM4C1230C3PM 微控制器数据手册版权©2007-2013 DS-TM4C1230C3PM-15553.2700版权版权© 2007-2013 Texas Instruments Incorporated。
Tiva 和 TivaWare 均为 Texas Instruments Incorporated 的注册商标。
ARM 和 Thumb 是 ARM 公司的注册商标,Cortex 是 ARM 公司的商标。
所有其他商标均属于其所有者的财产。
产品数据信息为发布时的信息。
根据 Texas Instruments 的标准条款,产品符合规格。
生产过程中没有必要对产品的所有参数进行测试。
请留意,此数据手册最后部分包含 Texas Instruments 半导体产品的可用性、标准保修期和关键任务应用的重要信息通告以及相关的免责声明。
Texas Instruments Incorporated108Wild Basin,Suite350Austin,TX78746/tm4c/sc/technical-support/product-information-centers.htmTiva™ TM4C1230C3PM 微控制器目录关于本文档 (30)受众 (30)关于本手册 (30)相关文档 (30)文档约定 (31)1结构概述 (33)1.1Tiva™ C 系列概述 (33)1.2TM4C1230C3PM 微控制器概述 (33)1.3TM4C1230C3PM 微控制器特性 (36)1.3.1ARM Cortex-M4F 处理器核心 (36)1.3.2片上存储器 (38)1.3.3串行通讯外设 (39)1.3.4系统集成 (42)1.3.5模拟 (47)1.3.6JTAG 和 ARM 串行线调试 (49)1.3.7封装和温度 (49)1.4TM4C1230C3PM 微控制器硬件细节 (49)1.5开发套件 (49)1.6支持信息 (50)2Cortex-M4F 处理器 (51)2.1结构框图 (52)2.2概述 (53)2.2.1系统级接口 (53)2.2.2集成的可配置调试 (53)2.2.3跟踪端口的接口单元(TPIU) (53)2.2.4Cortex-M4F 系统组件细节 (54)2.3编程模型 (54)2.3.1处理器模式和软件执行的权限级别 (55)2.3.2堆栈 (55)2.3.3寄存器映射 (55)2.3.4寄存器描述 (57)2.3.5异常和中断 (73)2.3.6数据类型 (73)2.4存储模型 (73)2.4.1内存区,类型和属性 (75)2.4.2内存访问存储系统顺序 (76)2.4.3存储器访问行为 (76)2.4.4存储器访问的软件顺序 (76)2.4.5位带区 (77)2.4.6数据保存 (79)2.4.7同步原语 (80)2.5异常模式 (81)2.5.1异常状态 (81)2.5.2异常类型 (82)2.5.3异常处理程序 (85)目录2.5.4向量表 (85)2.5.5异常优先级 (86)2.5.6中断优先级分组 (87)2.5.7异常进入和返回 (87)2.6故障处理 (89)2.6.1故障类型 (90)2.6.2故障扩大和硬件故障 (90)2.6.3故障状态寄存器和故障地址寄存器 (91)2.6.4死锁 (91)2.7电源管理 (91)2.7.1进入睡眠模式 (91)2.7.2从睡眠模式唤醒 (92)2.8指令集总结 (92)3Cortex-M4 外设 (99)3.1功能说明 (99)3.1.1系统定时器(SysTick) (99)3.1.2嵌套式向量化中断控制器(NVIC) (100)3.1.3系统控制模块 (SCB) (101)3.1.4存储器保护单元 (MPU) (102)3.1.5浮点单元 (FPU) (106)3.2寄存器映射 (109)3.3系统定时器(SysTick)寄存器描述 (112)3.4NVIC寄存器描述 (116)3.5系统控制模块(SCB)寄存器描述 (131)3.6存储器保护单元(MPU)寄存器描述 (159)3.7浮点单元 (FPU) 寄存器描述 (167)4JTAG 接口 (173)4.1结构框图 (174)4.2信号描述 (174)4.3功能说明 (175)4.3.1JTAG 接口管脚 (175)4.3.2JTAG TAP 控制器 (176)4.3.3移位寄存器 (177)4.3.4操作注意事项 (177)4.4初始化和配置 (180)4.5寄存器描述 (180)4.5.1指令寄存器 (IR) (180)4.5.2数据寄存器 (181)5系统控制 (184)5.1信号描述 (184)5.2功能说明 (184)5.2.1器件标识 (184)5.2.2复位控制 (184)5.2.3不可屏蔽的中断 (189)5.2.4功率控制 (189)5.2.5时钟控制 (190)5.2.6系统控制 (195)5.3初始化和配置 (199)Tiva™ TM4C1230C3PM 微控制器5.4寄存器映射 (199)5.5系统控制寄存器描述 (203)5.6系统控制传统寄存器描述 (357)6系统异常模块 (411)6.1功能说明 (411)6.2寄存器映射 (411)6.3寄存器描述 (411)7内部存储器 (419)7.1结构框图 (419)7.2功能说明 (420)7.2.1SRAM (420)7.2.2ROM (421)7.2.3Flash 存储器 (422)7.2.4EEPROM (427)7.3寄存器映射 (431)7.4Flash 存储器寄存器描述 (Flash 控制偏移量) (433)7.5EEPROM 寄存器描述(EEPROM 偏移量) (449)7.6存储器寄存器描述 (系统控制偏移量) (465)8微型直接存储器访问(μDMA) (473)8.1结构框图 (474)8.2功能说明 (474)8.2.1通道分配 (474)8.2.2优先级 (476)8.2.3仲裁数目 (476)8.2.4请求类型 (476)8.2.5通道配置 (477)8.2.6传输模式 (478)8.2.7待传输数目及增量 (487)8.2.8外设接口 (487)8.2.9软件请求 (487)8.2.10中断及错误 (487)8.3初始化和配置 (488)8.3.1模块初始化 (488)8.3.2存储器到存储器传输的配置 (488)8.3.3外设简单发送的配置 (490)8.3.4外设乒乓接收的配置 (491)8.3.5通道分配的配置 (493)8.4寄存器映射 (493)8.5μDMA 通道控制结构体 (495)8.6μDMA 寄存器描述 (502)9通用输入/输入端口(GPIOs) (536)9.1信号描述 (536)9.2功能说明 (538)9.2.1数据控制 (540)9.2.2中断控制 (541)9.2.3模式控制 (542)9.2.4确认控制 (542)目录9.2.5引脚(Pad)控制 (543)9.2.6标识 (543)9.3初始化和配置 (543)9.4寄存器映射 (544)9.5寄存器描述 (546)10通用定时器 (589)10.1结构框图 (590)10.2信号描述 (591)10.3功能说明 (592)10.3.1GPTM复位条件 (593)10.3.2定时器模式 (594)10.3.3等待触发模式 (603)10.3.4同步通用定时器模块 (603)10.3.5DMA 操作 (604)10.3.6访问连接的 16/32 位 GPTM 寄存器值 (604)10.3.7访问连接的 32/64 位宽 GPTM 寄存器值 (605)10.4初始化和配置 (606)10.4.1单次触发/周期定时器模式 (606)10.4.2实时时钟 (RTC) 模式 (607)10.4.3输入边沿计数模式下: (607)10.4.4输入边沿定时模式 (608)10.4.5PWM 模式 (609)10.5寄存器映射 (609)10.6寄存器描述 (610)11看门狗定时器 (653)11.1结构框图 (654)11.2功能说明 (654)11.2.1寄存器访问间隙 (655)11.3初始化和配置 (655)11.4寄存器映射 (655)11.5寄存器描述 (656)12模-数转换器(ADC) (678)12.1结构框图 (679)12.2信号描述 (679)12.3功能说明 (680)12.3.1采样序列发生器 (680)12.3.2模块控制 (681)12.3.3硬件采样平均电路 (684)12.3.4模-数转换器 (685)12.3.5差分采样 (687)12.3.6内部温度传感器 (689)12.3.7数字比较器 (690)12.4初始化和配置 (694)12.4.1模块初始化 (694)12.4.2采样序列发生器的配置 (695)12.5寄存器映射 (695)12.6寄存器描述 (697)Tiva™ TM4C1230C3PM 微控制器13通用异步收发器(UART) (760)13.1结构框图 (761)13.2信号描述 (761)13.3功能说明 (762)13.3.1发送/接收逻辑 (762)13.3.2波特率的产生 (763)13.3.3数据传输 (763)13.3.4串行红外(SIR) (764)13.3.5对ISO 7816的支持 (765)13.3.6对调制解调器握手信号的支持 (765)13.3.79 位 UART 模式 (766)13.3.8FIFO操作 (767)13.3.9中断信号 (767)13.3.10回送操作 (768)13.3.11DMA 操作 (768)13.4初始化和配置 (768)13.5寄存器映射 (770)13.6寄存器描述 (771)14同步串行接口(SSI) (817)14.1结构框图 (818)14.2信号描述 (818)14.3功能说明 (819)14.3.1位速率的产生 (819)14.3.2FIFO操作 (820)14.3.3中断信号 (820)14.3.4帧格式 (821)14.3.5DMA 操作 (828)14.4初始化和配置 (828)14.5寄存器映射 (830)14.6寄存器描述 (831)15内部集成电路(I2C)接口 (860)15.1结构框图 (861)15.2信号描述 (861)15.3功能说明 (862)15.3.1I2C 总线功能概览 (862)15.3.2可用的速度模式 (866)15.3.3中断信号 (867)15.3.4回送操作 (868)15.3.5命令序列流程图 (868)15.4初始化和配置 (877)15.4.1将 I2C 模块配置为以主机身份传输单字节数据 (877)15.4.2将 I2C 主机配置为高速模式 (878)15.5寄存器映射 (879)15.6寄存器描述(I2C 主机) (880)15.7寄存器描述(I2C 从机) (896)15.8寄存器描述(I2C 状态和控制寄存器) (906)目录16控制器局域网(CAN)模块 (909)16.1结构框图 (910)16.2信号描述 (910)16.3功能说明 (911)16.3.1初始化 (912)16.3.2基本操作 (912)16.3.3报文对象的发送 (913)16.3.4待发送报文对象的配置 (913)16.3.5待发送报文对象的刷新 (914)16.3.6已接收报文对象的接受 (915)16.3.7接收数据帧 (915)16.3.8接收远程帧 (915)16.3.9接收/发送优先级 (916)16.3.10接收报文对象的配置 (916)16.3.11已接收报文对象的处理 (917)16.3.12中断的处理 (918)16.3.13测试模式 (919)16.3.14位定时配置错误的注意事项 (920)16.3.15位时间与位速率 (920)16.3.16位定时参数的计算 (922)16.4寄存器映射 (925)16.5寄存器描述 (927)17模拟比较器 (955)17.1结构框图 (956)17.2信号描述 (956)17.3功能说明 (957)17.3.1内部参考电压编程 (957)17.4初始化和配置 (959)17.5寄存器映射 (960)17.6寄存器描述 (960)18管脚图 (969)19信号表 (970)19.1按管脚编号分类的信号 (971)19.2按信号名称分类的信号 (976)19.3按功能分类的信号(GPIO 除外) (981)19.4GPIO 管脚和复用功能 (986)19.5复用功能的可能的管脚赋值 (989)19.6未用管脚的处理 (991)20Electrical Characteristics (993)20.1Maximum Ratings (993)20.2Operating Characteristics (994)20.3Recommended Operating Conditions (995)20.4Load Conditions (997)20.5JTAG and Boundary Scan (998)20.6Power and Brown-Out (1000)20.6.1VDDA Levels (1000)20.6.2VDD Levels (1001)Tiva™ TM4C1230C3PM 微控制器20.6.3VDDC Levels (1002)20.6.4VDD Glitches (1003)20.6.5VDD Droop Response (1003)20.7Reset (1005)20.8On-Chip Low Drop-Out(LDO)Regulator (1007)20.9Clocks (1008)20.9.1PLL Specifications (1008)20.9.2PIOSC Specifications (1009)20.9.3Low-Frequency Internal Oscillator(LFIOSC)Specifications (1009)20.9.4Main Oscillator Specifications (1009)20.9.5System Clock Specification with ADC Operation (1012)20.10Sleep Modes (1013)20.11Flash Memory and EEPROM (1015)20.12Input/Output Pin Characteristics (1016)20.12.1GPIO Module Characteristics (1016)20.12.2Types of I/O Pins and ESD Protection (1016)20.13Analog-to-Digital Converter(ADC) (1020)20.14Synchronous Serial Interface(SSI) (1023)20.15Inter-Integrated Circuit(I2C)Interface (1026)20.16Analog Comparator (1027)20.17Current Consumption (1029)A封装信息 (1032)A.1可订购器件 (1032)A.2型号标识 (1033)A.3封装图 (1034)A.4封装材料 (1035)目录插图清单图 1-1.Tiva™ TM4C1230C3PM 微控制器高级框图 (35)图 2-1.CPU 结构图 (52)图 2-2.TPIU方框图 (54)图 2-3.Cortex-M4F 寄存器组 (56)图 2-4.位带映射 (79)图 2-5.数据保存 (80)图 2-6.向量表 (86)图 2-7.异常堆栈框 (88)图 3-1.SRD 使用示例 (104)图 3-2.FPU 寄存器块 (107)图 4-1.JTAG 模块方框图 (174)图 4-2.测试访问端口状态机 (177)图 4-3.IDCODE 寄存器格式 (182)图 4-4.BYPASS 寄存器格式 (182)图 4-5.边界扫描寄存器格式 (182)图 5-1.基本 RST 配置 (186)图 5-2.延长上电复位时间的外部电路 (187)图 5-3.复位电路由开关控制 (187)图 5-4.功率结构 (190)图 5-5.主时钟树 (192)图 5-6.模块时钟选择 (197)图 7-1.内部存储器结构图 (419)图 7-2.EEPROM 结构图 (420)图 8-1.μDMA 结构图 (474)图 8-2.乒乓式 μDMA 数据会话的示例 (480)图 8-3.存储器散聚模式:创建及配置 (482)图 8-4.存储器散聚模式:μDMA 复制序列 (483)图 8-5.外设散聚模式:创建及配置 (485)图 8-6.外设散聚模式:μDMA 复制序列 (486)图 9-1.数字 I/O 口 (539)图 9-2.模拟/数字 I/O 口 (540)图 9-3.GPIODATA 写实例 (541)图 9-4.GPIODATA 读实例 (541)图 10-1.GPTM 模块的结构图 (590)图 10-2.读取 RTC 值 (597)图 10-3.输入边沿计数模式实例,递减计数 (598)图 10-4.16 位输入边沿计时模式实例 (600)图 10-5.16-位PWM模式实例 (601)图 P 输出,GPTMTnMATCHR > GPTMTnILR (602)图 P 输出,GPTMTnMATCHR = GPTMTnILR (602)图 P 输出,GPTMTnILR > GPTMTnMATCHR (603)图 10-9.定时器菊花链 (603)图 11-1.WDT模块的结构图 (654)图 12-1.两个 ADC 模块的连接结构图 (679)图 12-2.ADC模块框图 (679)图 12-3.ADC 采样相位 (682)图 12-4.ADC 采样率倍增 (683)图 12-5.交错采样 (683)图 12-6.采样平均的实例 (685)图 12-7.ADC 输入端等效框图 (686)图 12-8.ADC 参考电压 (686)图 12-9.ADC 转换结果 (687)图 12-10.差分电压表达式 (689)图 12-11.内部温度传感器特性 (690)图 12-12.低值带工作(CIC = 0x0) (692)图 12-13.中值带工作(CIC = 0x1 ) (693)图 12-14.高值带工作(CIC = 0x3) (694)图 13-1.UART模块的结构图 (761)图 13-2.UART字符帧 (763)图 13-3.IrDA 数据调制 (765)图 14-1.SSI模块的结构图 (818)图 14-2.TI 同步串行帧格式(单次传输) (821)图 14-3.TI 同步串行的帧格式(连续传输) (822)图 14-4.SPO = 0 和 SPH = 0 时的飞思卡尔 SPI 格式(单次传输) (823)图 14-5.SPO = 0 和 SPH = 0 时的飞思卡尔 SPI 格式 (连续传输) (823)图 14-6.SPO = 0、SPH = 1 时的飞思卡尔 SPI 帧格式 (824)图 14-7.SPO = 1 和 SPH = 0 时的飞思卡尔 SPI 帧格式(单次传输) (825)图 14-8.SPO = 1 和 SPH = 0 时的飞思卡尔 SPI 帧格式(连续传输) (825)图 14-9.SPO = 1、SPH = 1 时的飞思卡尔 SPI 帧格式 (826)图 14-10.MICROWIRE的帧格式 (单帧) (826)图 14-11.MICROWIRE的帧格式 (连续传输) (827)图 14-12.MICROWIRE 帧格式,SSInFss 输入建立和保持时间要求 (828)图 15-1.I2C 结构图 (861)图 15-2.I2C 总线配置 (862)图 15-3.START 和 STOP 条件 (862)图 15-4.带 7 位地址的完整数据传输 (863)图 15-5.首字节的R/S位 (863)图 15-6.I2C 总线位传输过程中的数据有效性 (863)图 15-7.高速数据格式 (867)图 15-8.主机单次传输 (870)图 15-9.主机单次接收 (871)图 15-10.多数据字节的主机传输 (872)图 15-11.多数据字节的主机接收 (873)图 15-12.主机传输后以重复开始序列进行的主机接收 (874)图 15-13.主机接收后以重复开始序列进行的主机传输 (875)图 15-14.标准高速模式主机传输 (876)图 15-15.从机命令序列 (877)图 16-1.CAN 控制器结构图 (910)图 16-2.CAN 数据帧/远程帧 (911)图 16-3.FIFO 缓冲区中的报文对象 (918)图 16-4.CAN 的位时间 (921)图 17-1.模拟比较器模块的结构图 (956)图 17-2.比较单元的结构 (957)图 17-3.比较器内部参考结构 (958)图 18-1.64 管脚 LQFP 封装管脚图 (969)图 20-1.Load Conditions (997)图 20-2.JTAG Test Clock Input Timing (998)图 20-3.JTAG Test Access Port(TAP)Timing (999)图 20-4.Power Assertions versus VDDA Levels (1001)图 20-5.Power and Brown-Out Assertions versus VDD Levels (1002)图 20-6.POK assertion vs VDDC (1003)图 20-7.POR-BOR0-BOR1VDD Glitch Response (1003)图 20-8.POR-BOR0-BOR1VDD Droop Response (1004)图 20-9.Digital Power-On Reset Timing (1005)图 20-10.Brown-Out Reset Timing (1005)图 20-11.External Reset Timing(RST) (1006)图 20-12.Software Reset Timing (1006)图 20-13.Watchdog Reset Timing (1006)图 20-14.MOSC Failure Reset Timing (1006)图 20-15.ESD Protection on Fail-Safe Pins (1017)图 20-16.ESD Protection on Non-Fail-Safe Pins (1018)图 20-17.ADC Input Equivalency Diagram (1022)图 20-18.SSI Timing for TI Frame Format(FRF=01),Single Transfer TimingMeasurement (1024)图 20-19.SSI Timing for MICROWIRE Frame Format(FRF=10),Single Transfer (1024)图 20-20.Master Mode SSI Timing for SPI Frame Format(FRF=00),with SPH=1 (1025)图 20-21.Slave Mode SSI Timing for SPI Frame Format(FRF=00),with SPH=1 (1025)图 20-22.I2C Timing (1026)图 A-1.器件型号说明 (1032)图 A-2.TM4C1230C3PM 64 管脚 LQFP 封装图 (1034)图 A-3.64 管脚 LQFP PM 封装载带 (1035)图 A-4.64 管脚 LQFP PM 封装塑料圆盘 (1036)图 A-5.64 管脚 LQFP PM 封装用载带圆盘箱 (1036)表格清单表 1.文档约定 (31)表 1-1.TM4C1230C3PM 微控制器特性 (33)表 2-1.处理器模式、特权等级和堆栈使用摘要 (55)表 2-2.处理器寄存器映射 (56)表 2-3.PSR 寄存器组合 (62)表 2-4.存储器映射 (73)表 2-5.存储器访问行为 (76)表 2-6.SRAM 存储器位带区 (77)表 2-7.外设存储器位带区 (78)表 2-8.异常类型 (83)表 2-9.中断信号 (83)表 2-10.异常返回行为 (89)表 2-11.故障 (90)表 2-12.故障状态寄存器和故障地址寄存器 (91)表 2-13.Cortex-M4F 指令摘要 (93)表 3-1.内核外设寄存器区域 (99)表 3-2.存储器属性摘要 (102)表 3-3.TEX、S、C 和 B 位域编码 (105)表 3-4.存储器属性编码对应的高速缓存策略 (105)表 3-5.AP 位域编码 (105)表 3-6.Stellaris Tiva™ C 系列微控制器的存储器区属性 (106)表 3-7.QNaN 和 SNaN 处理 (108)表 3-8.外设寄存器映射 (109)表 3-9.中断优先级分组 (139)表 3-10.SIZE 域数值示例 (166)表 4-1.JTAG_SWD_SWO 信号 (64LQFP) (174)表 4-2.上电复位或 RST 生效后的 JTAG 端口管脚状态 (175)表 4-3.JTAG 指令寄存器命令 (180)表 5-1.系统控制; 时钟信号 (64LQFP) (184)表 5-2.复位源 (185)表 5-3.时钟源选项 (191)表 5-4.使用 SYSDIV 域可能实现的系统时钟频率 (192)表 5-5.使用 SYSDIV2 域可能实现的系统时钟频率示例 (193)表 5-6.当 DIV400=1 时可能实现的系统时钟频率示例 (193)表 5-7.系统控制寄存器映射 (199)表 5-8.替代 RCC 域的 RCC2 域 (223)表 6-1.系统异常寄存器映射 (411)表 7-1.Flash 存储器保护策略组合 (423)表 7-2.用户可编程的 Flash 存储器驻留寄存器 (427)表 7-3.Flash 寄存器映射 (431)表 8-1.μDMA 通道分配 (475)表 8-2.所支持的请求类型 (476)表 8-3.控制结构体的存储器映射 (477)表 8-4.通道控制结构体 (477)表 8-5.μDMA 读操作实例:8 位外设 (487)表 8-6.μDMA 中断分配 (488)表 8-7.第 30 号通道的通道控制结构体偏移量 (489)表 8-8.存储器传输示例的通道控制字配置 (489)表 8-9.第 7 号通道的通道控制结构体偏移量 (490)表 8-10.外设传输示例的通道控制字配置 (490)表 8-11.第 8 号通道的主控制结构体及副控制结构体偏移量 (492)表 8-12.外设乒乓接收示例的通道控制字配置 (492)表 8-13.μDMA 寄存器映射 (494)表 9-1.具有非 0 复位值的 GPIO 管脚 (537)表 9-2.GPIO 管脚和复用功能 (64LQFP) (537)表 9-3.GPIO 端口配置示例 (544)表 9-4.GPIO 中断配置示例 (544)表 9-5.具有非 0 复位值的 GPIO 管脚 (545)表 9-6.GPIO 触发寄存器映射 (545)表 9-7.具有非 0 复位值的 GPIO 管脚 (556)表 9-8.具有非 0 复位值的 GPIO 管脚 (562)表 9-9.具有非 0 复位值的 GPIO 管脚 (564)表 9-10.具有非 0 复位值的 GPIO 管脚 (567)表 9-11.具有非 0 复位值的 GPIO 管脚 (573)表 10-1.可用的 CCP 管脚 (590)表 10-2.通用定时器信号 (64LQFP) (591)表 10-3.通用定时器功能 (592)表 10-4.单次触发或周期模式下启用定时器时的计数器值 (594)表 10-5.带预分频器的 16 位定时器配置 (595)表 10-6.带预分频器配置的 32 位定时器(配置为 32/64 位模式) (595)表 10-7.RTC 模式下启用定时器时的计数器值 (596)表 10-8.输入边沿计数模式下启用定时器时的计数器值 (598)表 10-9.输入事件计数模式下启用定时器时的计数器值 (599)表 10-10.PWM 模式下启用定时器时的计数器值 (600)表 10-11.GPTM 模式的超时动作 (604)表 10-12.定时器触发寄存器映射 (610)表 11-1.看门狗定时器寄存器映射 (655)表 12-1.ADC 信号 (64LQFP) (680)表 12-2.采样序列发生器的采样数和 FIFO 深度 (680)表 12-3.差分采样对 (688)表 12-4.ADC 寄存器映射 (695)表 13-1.UART 信号 (64LQFP) (761)表 13-2.流控模式 (766)表 13-3.UART 寄存器映射 (770)表 14-1.SSI 信号 (64LQFP) (819)表 14-2.SSI 寄存器映射 (830)表 15-1.I2C 信号 (64LQFP) (861)表 15-2.I2C 主机定时器周期与速度模式示例 (866)表 15-3.高速模式下 I2C 主机定时器周期的示例 (867)表 15-4.内部集成电路(I2C)接口寄存器映射 (879)表 15-5.为 I2CMCS[3:0] 域写入域解码 (885)表 16-1.控制器局域网信号 (64LQFP) (910)表 16-2.报文对象的配置 (915)表 16-3.CAN 协议范围 (921)表 16-4.CANBIT 寄存器值 (922)表 16-5.CAN 寄存器映射 (925)表 17-1.模拟比较器触发信号 (64LQFP) (956)表 17-2.内部参考电压和 ACREFCTL 域值 (958)表 17-3.模拟比较器参考电压特性,V DDA = 3.3V,EN= 1 且 RNG = 0 (959)表 17-4.模拟比较器参考电压特性,V DDA = 3.3V,EN= 1 且 RNG = 1 (959)表 17-5.模拟比较器触发寄存器映射 (960)表 19-1.默认为复用功能的 GPIO 管脚 (970)表 19-2.按管脚编号分类的信号 (971)表 19-3.按信号名称分类的信号 (976)表 19-4.按功能分类的信号(GPIO 除外) (981)表 19-5.GPIO 管脚和复用功能 (986)表 19-6.复用功能的可能的管脚赋值 (989)表 19-7.未用信号的连接(64 管脚 LQFP) (991)表 20-1.Maximum Ratings (993)表 20-2.ESD Absolute Maximum Ratings (993)表 20-3.Temperature Characteristics (994)表 20-4.Thermal Characteristics (994)表 20-5.Recommended DC Operating Conditions (995)表 20-6.Recommended GPIO Pad Operating Conditions (995)表 20-7.GPIO Current Restrictions (995)表 20-8.GPIO Package Side Assignments (996)表 20-9.JTAG Characteristics (998)表 20-10.Power-On and Brown-Out Levels (1000)表 20-11.Reset Characteristics (1005)表 20-12.LDO Regulator Characteristics (1007)表 20-13.Phase Locked Loop(PLL)Characteristics (1008)表 20-14.Actual PLL Frequency (1008)表 20-15.PIOSC Clock Characteristics (1009)表 20-16.Low-Frequency internal Oscillator Characteristics (1009)表 20-17.Main Oscillator Input Characteristics (1009)表 20-18.Crystal Parameters (1011)表 20-19.Supported MOSC Crystal Frequencies (1012)表 20-20.System Clock Characteristics with ADC Operation (1012)表 20-21.Sleep Modes AC Characteristics (1013)表 20-22.Time to Wake with Respect to Low-Power Modes (1013)表 20-23.Flash Memory Characteristics (1015)表 20-24.EEPROM Characteristics (1015)表 20-25.GPIO Module Characteristics (1016)表 20-26.Pad Voltage/Current Characteristics for Fail-Safe Pins (1017)表 20-27.Fail-Safe GPIOs that Require an External Pull-up (1018)表 20-28.Non-Fail-Safe I/O Pad Voltage/Current Characteristics (1018)表 20-29.ADC Electrical Characteristics (1020)表 20-30.SSI Characteristics (1023)表 20-31.I2C Characteristics (1026)表 20-32.Analog Comparator Characteristics (1027)表 20-33.Analog Comparator Voltage Reference Characteristics (1027)表 20-34.Analog Comparator Voltage Reference Characteristics,V DDA=3.3V,EN=1,and RNG=0 (1027)表 20-35.Analog Comparator Voltage Reference Characteristics,V DDA=3.3V,EN=1,and RNG=1 (1028)表 20-36.Current Consumption (1029)表 A-1.可订购的器件型号 (1032)寄存器列表Cortex-M4F 处理器 (51)寄存器 1:Cortex 通用寄存器 0(R0) (58)寄存器 2:Cortex 通用寄存器 1(R1) (58)寄存器 3:Cortex 通用寄存器 2(R2) (58)寄存器 4:Cortex 通用寄存器 3(R3) (58)寄存器 5:Cortex 通用寄存器 4(R4) (58)寄存器 6:Cortex 通用寄存器 5(R5) (58)寄存器 7:Cortex 通用寄存器 6(R6) (58)寄存器 8:Cortex 通用寄存器 7(R7) (58)寄存器 9:Cortex 通用寄存器 8(R8) (58)寄存器 10:Cortex 通用寄存器 9(R9) (58)寄存器 11:Cortex 通用寄存器 10(R10) (58)寄存器 12:Cortex 通用寄存器 11(R11) (58)寄存器 13:Cortex 通用寄存器 12(R12) (58)寄存器 14:堆栈指针(SP) (59)寄存器 15:链接寄存器(LR) (60)寄存器 16:程序计数器(PC) (61)寄存器 17:程序状态寄存器(PSR) (62)寄存器 18:优先级屏蔽寄存器(PRIMASK) (66)寄存器 19:故障屏蔽寄存器(FAULTMASK) (67)寄存器 20:基本优先级屏蔽寄存器(BASEPRI) (68)寄存器 21:控制寄存器(CONTROL) (69)寄存器 22:浮点状态控制(FPSC)寄存器 (71)Cortex-M4 外设 (99)寄存器 1:SysTick 控制及状态寄存器(STCTRL),偏移量 0x010 (113)寄存器 2:SysTick 重载值寄存器(STRELOAD),偏移量 0x014 (115)寄存器 3:SysTick 当前值寄存器(STCURRENT),偏移量 0x018 (116)寄存器 4:中断 0-31 置位启用寄存器(EN0),偏移量 0x100 (117)寄存器 5:中断 32-63 置位启用寄存器(EN1),偏移量 0x104 (117)寄存器 6:中断 64-95 置位启用寄存器(EN2),偏移量 0x108 (117)寄存器 7:中断 96-127 置位启用寄存器(EN3),偏移量 0x10C (117)寄存器 8:中断 128-138 设置启用寄存器(EN4),偏移量 0x110 (118)寄存器 9:中断 0-31 清除启用寄存器(DIS0),偏移量 0x180 (119)寄存器 10:中断 32-63 清除启用寄存器(DIS1),偏移量 0x184 (119)寄存器 11:中断 64-95 清除启用寄存器(DIS2),偏移量 0x188 (119)寄存器 12:中断 96-127 清除启用寄存器(DIS3),偏移量 0x18C (119)寄存器 13:中断 128-138 清除启用寄存器(DIS4),偏移量 0x190 (120)寄存器 14:中断 0-31 置位挂起寄存器(PEND0),偏移量 0x200 (121)寄存器 15:中断 32-63 置位挂起寄存器(PEND1),偏移量 0x204 (121)寄存器 16:中断 64-95 置位挂起寄存器(PEND2),偏移量 0x208 (121)寄存器 17:中断 96-127 置位挂起寄存器(PEND3),偏移量 0x20C (121)寄存器 18:中断 128-138 置位挂起寄存器(PEND4),偏移量 0x210 (122)寄存器 19:中断 0-31 清除挂起寄存器(UNPEND0),偏移量 0x280 (123)寄存器 20:中断 32-63 清除挂起寄存器(UNPEND1),偏移量 0x284 (123)寄存器 21:中断 64-95 清除挂起寄存器(UNPEND2),偏移量 0x288 (123)寄存器 22:中断 96-127 清除挂起寄存器(UNPEND3),偏移量 0x28C (123)寄存器 23:中断 128-138 清除挂起寄存器(UNPEND4),偏移量 0x290 (124)寄存器 24:中断 0-31 活动位寄存器(ACTIVE0),偏移量 0x300 (125)寄存器 25:中断 32-63 活动位寄存器(ACTIVE1),偏移量 0x304 (125)寄存器 26:中断 64-95 活动位寄存器(ACTIVE2),偏移量 0x308 (125)寄存器 27:中断 96-127 活动位寄存器(ACTIVE3),偏移量 0x30C (125)寄存器 28:中断 128-138 活动位寄存器(ACTIVE4),偏移量 0x310 (126)寄存器 29:中断 0-3 优先级寄存器(PRI0),偏移量 0x400 (127)寄存器 30:中断 4-7 优先级寄存器(PRI1),偏移量 0x404 (127)寄存器 31:中断 8-11 优先级寄存器(PRI2),偏移量 0x408 (127)寄存器 32:中断 12-15 优先级寄存器(PRI3),偏移量 0x40C (127)寄存器 33:中断 16-19 优先级寄存器(PRI4),偏移量 0x410 (127)寄存器 34:中断 20-23 优先级寄存器(PRI5),偏移量 0x414 (127)寄存器 35:中断 24-27 优先级寄存器(PRI6),偏移量 0x418 (127)寄存器 36:中断 28-31 优先级寄存器(PRI7),偏移量 0x41C (127)寄存器 37:中断 32-35 优先级寄存器(PRI8),偏移量 0x420 (127)寄存器 38:中断 36-39 优先级寄存器(PRI9),偏移量 0x424 (127)寄存器 39:中断 40-43 优先级寄存器(PRI10),偏移量 0x428 (127)寄存器 40:中断 44-47 优先级寄存器(PRI11),偏移量 0x42C (127)寄存器 41:中断 48-51 优先级寄存器(PRI12),偏移量 0x430 (127)寄存器 42:中断 52-55 优先级寄存器(PRI13),偏移量 0x434 (127)寄存器 43:中断 56-59 优先级寄存器(PRI14),偏移量 0x438 (127)寄存器 44:中断 60-63 优先级寄存器(PRI15),偏移量 0x43C (127)寄存器 45:中断 64-67 优先级寄存器(PRI16),偏移量 0x440 (129)寄存器 46:中断 68-71 优先级寄存器(PRI17),偏移量 0x444 (129)寄存器 47:中断 72-75 优先级寄存器(PRI18),偏移量 0x448 (129)寄存器 48:中断 76-79 优先级寄存器(PRI19),偏移量 0x44C (129)寄存器 49:中断 80-83 优先级寄存器(PRI20),偏移量 0x450 (129)寄存器 50:中断 84-87 优先级寄存器(PRI21),偏移量 0x454 (129)寄存器 51:中断 88-91 优先级寄存器(PRI22),偏移量 0x458 (129)寄存器 52:中断 92-95 优先级寄存器(PRI23),偏移量 0x45C (129)寄存器 53:中断 96-99 优先级寄存器(PRI24),偏移量 0x460 (129)寄存器 54:中断 100-103 优先级寄存器(PRI25),偏移量 0x464 (129)寄存器 55:中断 104-107 优先级寄存器(PRI26),偏移量 0x468 (129)寄存器 56:中断 108-111 优先级寄存器(PRI27),偏移量 0x46C (129)寄存器 57:中断 112-115 优先级寄存器(PRI28),偏移量 0x470 (129)寄存器 58:中断 116-119 优先级寄存器(PRI29),偏移量 0x474 (129)寄存器 59:中断 120-123 优先级寄存器(PRI30),偏移量 0x478 (129)寄存器 60:中断 124-127 优先级寄存器(PRI31),偏移量 0x47C (129)寄存器 61:中断 128-131 优先级寄存器(PRI32),偏移量 0x480 (129)寄存器 62:中断 132-135 优先级寄存器(PRI33),偏移量 0x484 (129)寄存器 63:中断 136-138 优先级寄存器(PRI34),偏移量 0x488 (129)寄存器 64:软件触发中断寄存器(SWTRIG),偏移量 0xF00 (131)寄存器 65:辅助控制寄存器(ACTLR),偏移量 0x008 (132)寄存器 66:CPU ID 基础寄存器(CPUID),偏移量 0xD00 (134)寄存器 67:中断控制及状态寄存器(INTCTRL),偏移量 0xD04 (135)寄存器 68:向量表寄存器(VTABLE),偏移量 0xD08 (138)寄存器 69:应用程序中断及复位控制寄存器(APINT),偏移量 0xD0C (139)寄存器 70:系统控制寄存器(SYSCTRL),偏移量 0xD10 (141)寄存器 71:配置及控制寄存器(CFGCTRL),偏移量 0xD14 (143)寄存器 72:系统处理程序优先级寄存器 1(SYSPRI1),偏移量 0xD18 (145)寄存器 73:系统处理程序优先级寄存器 2(SYSPRI2),偏移量 0xD1C (146)寄存器 74:系统处理程序优先级寄存器 3(SYSPRI3),偏移量 0xD20 (147)寄存器 75:系统处理程序控制及状态寄存器(SYSHNDCTRL),偏移量 0xD24 (148)寄存器 76:可配置故障状态寄存器(FAULTSTAT),偏移量 0xD28 (151)寄存器 77:硬故障状态寄存器(HFAULTSTAT),偏移量 0xD2C (157)寄存器 78:存储器管理故障地址寄存器(MMADDR),偏移量 0xD34 (158)寄存器 79:总线故障地址寄存器(FAULTADDR),偏移量 0xD38 (159)寄存器 80:MPU 类型寄存器(MPUTYPE),偏移量 0xD90 (160)寄存器 81:MPU 控制寄存器(MPUCTRL),偏移量 0xD94 (161)寄存器 82:MPU 区编号寄存器(MPUNUMBER),偏移量 0xD98 (163)寄存器 83:MPU 区基地址寄存器(MPUBASE),偏移量 0xD9C (164)寄存器 84:MPU 区基地址别名寄存器 1(MPUBASE1),偏移量 0xDA4 (164)寄存器 85:MPU 区基地址别名寄存器 2(MPUBASE2),偏移量 0xDAC (164)寄存器 86:MPU 区基地址别名寄存器 3(MPUBASE3),偏移量 0xDB4 (164)寄存器 87:MPU 区属性和大小寄存器(MPUATTR),偏移量 0xDA0 (166)寄存器 88:MPU 区属性和大小别名寄存器 1(MPUATTR1),偏移量 0xDA8 (166)寄存器 89:MPU 区属性和大小别名寄存器 2(MPUATTR2),偏移量 0xDB0 (166)寄存器 90:MPU 区属性和大小别名寄存器 3(MPUATTR3),偏移量 0xDB8 (166)寄存器 91:协处理器访问控制(CPAC),偏移量 0xD88 (168)寄存器 92:浮点上下文控制(FPCC),偏移量 0xF34 (169)寄存器 93:浮点上下文访问(FPCA),偏移量 0xF38 (171)寄存器 94:浮点默认状态控制(FPDSC),偏移量 0xF3C (172)系统控制 (184)寄存器 1:器件标识 0(DID0),偏移量 0x000 (204)寄存器 2:器件标识寄存器 1(DID1),偏移量 0x004 (206)寄存器 3:掉电复位控制(PBORCTL),偏移量 0x030 (208)寄存器 4:原始中断状态(RIS),偏移量 0x050 (209)寄存器 5:中断屏蔽控制(IMC),偏移量 0x054 (211)寄存器 6:屏蔽的中断状态和清除(MISC),偏移量 0x058 (213)寄存器 7:复位原因(RESC),偏移量 0x05C (215)寄存器 8:运行模式时钟配置(RCC),偏移量 0x060 (217)寄存器 9:GPIO 高性能总线控制(GPIOHBCTL),偏移量 0x06C (221)寄存器 10:运行模式时钟配置 2(RCC2),偏移量 0x070 (223)寄存器 11:主振荡器控制(MOSCCTL),偏移量 0x07C (226)寄存器 12:深度睡眠时钟配置(DSLPCLKCFG),偏移量 0x144 (227)寄存器 13:系统属性寄存器(SYSPROP),偏移量 0x14C (229)寄存器 14:精确内部振荡器校准(PIOSCCAL),偏移量 0x150 (231)寄存器 15:PLL 频率寄存器 0(PLLFREQ0),偏移量 0x160 (232)寄存器 16:PLL 频率寄存器 1(PLLFREQ1),偏移量 0x164 (233)寄存器 17:PLL 状态寄存器(PLLSTAT),偏移量 0x168 (234)寄存器 18:睡眠功率配置寄存器(SLPPWRCFG),偏移量 0x188 (235)寄存器 19:深度睡眠功率配置寄存器(DSLPPWRCFG),偏移量 0x18C (236)寄存器 20:LDO 睡眠功率控制寄存器(LDOSPCTL),偏移量 0x1B4 (237)寄存器 21:LDO 睡眠功率校准寄存器(LDOSPCAL),偏移量 0x1B8 (239)寄存器 22:LDO 深度睡眠功率控制寄存器(LDODPCTL),偏移量 0x1BC (240)寄存器 23:LDO 深度睡眠功率校准寄存器(LDODPCAL),偏移量 0x1C0 (242)寄存器 24:睡眠/深度睡眠功率模式状态寄存器(SDPMST),偏移量 0x1CC (243)寄存器 25:看门狗定时器外设存在寄存器(PPWD),偏移量 0x300 (246)寄存器 26:16/32 位通用定时器外设存在寄存器(PPTIMER),偏移量 0x304 (247)寄存器 27:通用输入/输出外设存在寄存器(PPGPIO),偏移量 0x308 (249)寄存器 28:微型直接存储器访问外设存在寄存器(PPDMA),偏移量 0x30C (252)寄存器 29:休眠外设存在寄存器(PPHIB),偏移量 0x314 (253)寄存器 30:通用异步收发器外设存在寄存器(PPUART),偏移量 0x318 (254)寄存器 31:同步串行接口外设存在寄存器(PPSSI),偏移量 0x31C (256)寄存器 32:内部集成电路外设存在寄存器(PPI2C),偏移量 0x320 (257)寄存器 33:通用串行总线外设存在寄存器(PPUSB),偏移量 0x328 (259)寄存器 34:控制器局域网外设存在寄存器(PPCAN),偏移量 0x334 (260)寄存器 35:模数转换器外设存在寄存器(PPADC),偏移量 0x338 (261)寄存器 36:模拟比较器外设存在寄存器(PPACMP),偏移量 0x33C (262)寄存器 37:脉宽调解器外设存在寄存器(PPPWM),偏移量 0x340 (263)寄存器 38:正交编码器接口外设存在寄存器(PPQEI),偏移量 0x344 (264)寄存器 39:EEPROM 外设存在寄存器(PPEEPROM),偏移量 0x358 (265)寄存器 40:32/64 位宽通用定时器外设存在寄存器(PPWTIMER),偏移量 0x35C (266)寄存器 41:看门狗定时器软件复位寄存器(SRWD),偏移量 0x500 (268)寄存器 42:16/32 位通用定时器软件复位寄存器(SRTIMER),偏移量 0x504 (269)寄存器 43:通用输入/输出软件复位寄存器(SRGPIO),偏移量 0x508 (271)寄存器 44:微型直接存储器访问软件复位寄存器(SRDMA),偏移量 0x50C (273)寄存器 45:通用异步收发器软件复位寄存器(SRUART),偏移量 0x518 (274)寄存器 46:同步串行接口软件复位寄存器(SRSSI),偏移量 0x51C (276)寄存器 47:内部集成电路软件复位寄存器(SRI2C),偏移量 0x520 (278)寄存器 48:控制器局域网软件复位寄存器(SRCAN),偏移量 0x534 (280)寄存器 49:模数转换器软件复位寄存器(SRADC),偏移量 0x538 (281)寄存器 50:模数比较器软件复位寄存器(SRACMP),偏移量 0x53C (282)寄存器 51:EEPROM 软件复位寄存器(SREEPROM),偏移量 0x558 (283)寄存器 52:32/64 位宽通用定时器软件复位寄存器(SRWTIMER),偏移量 0x55C (284)寄存器 53:看门狗定时器运行模式时钟门控控制寄存器(RCGCWD),偏移量 0x600 (286)寄存器 54:16/32 位通用定时器运行模式时钟门控控制寄存器(RCGCTIMER),偏移量 0x604 (287)寄存器 55:通用输入/输出运行模式时钟门控控制寄存器(RCGCGPIO),偏移量 0x608 (289)寄存器 56:微型直接存储器访问运行模式时钟门控控制寄存器(RCGCDMA),偏移量 0x60C (291)寄存器 57:通用异步收发器运行模式时钟门控控制寄存器(RCGCUART),偏移量 0x618 (292)寄存器 58:同步串行接口运行模式时钟门控控制寄存器(RCGCSSI),偏移量 0x61C (294)寄存器 59:内部集成电路运行模式时钟门控控制寄存器(RCGCI2C),偏移量 0x620 (296)寄存器 60:控制器局域网运行模式时钟门控控制寄存器(RCGCCAN),偏移量 0x634 (298)寄存器 61:模数转换器运行模式时钟门控控制寄存器(RCGCADC),偏移量 0x638 (299)寄存器 62:模拟比较器运行模式时钟门控控制寄存器(RCGCACMP),偏移量 0x63C (300)寄存器 63:EEPROM 运行模式时钟门控控制寄存器(RCGCEEPROM),偏移量 0x658 (301)寄存器 64:32/64 位宽通用定时器运行模式时钟门控控制寄存器(RCGCWTIMER),偏移量0x65C (302)寄存器 65:看门狗定时器睡眠模式时钟门控控制寄存器(SCGCWD),偏移量 0x700 (304)寄存器 66:16/32 位通用定时器睡眠模式时钟门控控制寄存器(SCGCTIMER),偏移量 0x704 (305)寄存器 67:通用输入/输出睡眠模式时钟门控控制寄存器(SCGCGPIO),偏移量 0x708 (307)寄存器 68:微型直接存储器访问睡眠模式时钟门控控制寄存器(SCGCDMA),偏移量 0x70C (309)寄存器 69:通用异步收发器睡眠模式时钟门控控制寄存器(SCGCUART),偏移量 0x718 (310)。