小学创客教育Arduino创意机器人13 走直线小车
- 格式:pptx
- 大小:10.20 MB
- 文档页数:7
中小学创客实验室方案引言近年来,创客教育在中小学教育中的重要性日益凸显。
创客教育通过激发学生的创造力和创新精神,培养学生的动手能力、实践能力和解决问题的能力。
为了推进中小学创客教育的发展,创建中小学创客实验室成为了一种常见的方式。
一、实验室设备设施中小学创客实验室需要配备一系列的设备和设施,以支持学生在创客教育中的实践操作和实验研究。
常见的创客实验室设备包括:3D打印机、激光切割机、Arduino开发板、传感器、电子元器件、手工工具等。
此外,为了确保学生的安全,实验室还应该配备相应的安全设施,如灭火器、急救箱等。
二、创客教育课程设计中小学创客实验室的课程设计应该结合学生的年龄特点和学习水平,合理设置不同层次的创客活动。
根据学校的实际情况和资源,可以设计如下的创客教育课程:1. 初级课程:介绍创客教育的基本概念和原理,培养学生的动手能力和实践能力。
例如,通过搭建简单的电路、制作简单的机械模型等项目,培养学生的创造力和解决问题的能力。
2. 中级课程:进一步拓展学生的创客技能,引导学生进行更加复杂的创客项目。
例如,利用Arduino开发板和传感器制作智能家居控制系统、机器人等。
3. 高级课程:面向对创客教育有较高兴趣和天赋的学生,设置更加深入和专业的创客课程。
例如,引导学生学习3D建模技术、利用激光切割机制作精细的零件等。
三、创客教育活动安排中小学创客实验室的活动安排应该是多样化和灵活的,以满足不同学生的需求和兴趣。
以下是一些常见的创客教育活动安排:1. 创客竞赛:组织学生参加各种创客竞赛,如机器人竞赛、创意设计竞赛等。
通过参与竞赛,学生可以锻炼团队协作能力、解决问题的能力,同时也能够通过与其他学生的交流和比拼提高自己的技术水平。
2. 创客作品展示:定期组织学生展示自己的创客作品,并邀请专业人士和家长参观。
通过展示作品,学生可以展示自己的创新意识和创造力,同时也能够得到专业人士的意见和建议。
3. 创客讲座和工作坊:邀请专业创客人士或企业代表来学校开展讲座和工作坊,分享自己的创客经验和技术。
基于开源硬件Arduino的小学机器人微型课程内容设计培养学生的创新能力是新课程的重要理念,机器人教学是培养学生创新能力的环节之一。
目前,机器人教育在我国正处于起步阶段,越来越受到各级教育部门和学校的重视,各级各类机器人竞赛层出不穷。
机器人教育大有推广普及之势。
然而,现在很多学校的机器人教育却处于十分尴尬的境地。
一方面,机器人课程并未列入常规教学,大多以竞赛为导向,以课外小组等方式开展,缺少较为完善的课程体系,普及面十分狭窄。
另一方面,机器人硬件设备无统一标准,各品牌机器人设备之间无法兼容,而且价格高昂。
此外,机器人厂商出于对技术的保护不公开机器人设备的技术细节,学生只能在厂商提供的若干种功能模块中进行学习,不利于创新能力的培养。
探寻一种开放的机器人硬件并设计出适应学生学习特点的机器人课程成为机器人教育普及的突破口。
一、开源硬件与Arduino机器人开源硬件是继承开源软件的思想开发的。
开源硬件的开发者将硬件所有资料公开,包括原理图、零件列表等,任何人或组织都可以使用这些资料。
Arduino 是一种应用广泛的开源硬件,包括一个单片机开发板和软件开发系统。
使用Arduino可以制作出各种各样的电子创意作品,制作机器人是其中一个重要应用方向。
利用Arduino制作的机器人统称为Arduino机器人。
Arduino机器人具有以下优点:1.技术资料公开得益于开源思想,Arduino的技术资料全部公开,任何人都可以获得Arduino 的技术细节。
开源对于知识的传播有很大的帮助作用。
2.软件系统易于学习Arduino的开发目的是供非单片机专业人士使用,使用它不需要学习单片机语言。
Arduino的软件系统使用的是初学者也能很容易掌握的编程环境,并且可以选择图形化编程界面,小学生也能轻松掌握编程工具的使用方法。
3.参考资源十分丰富Arduino用户非常多而且很活跃,在网络上能够找到使用Arduino制作的各种机器人的资料,这对于拓展思路、培养创新精神十分有益。
基于Mixly+Arduino的创客教育在小学高年级校本课程实施探究发布时间:2022-04-23T06:15:39.121Z 来源:《中小学教育》2021年11月第33期作者:张可玉[导读] 创客教育蓬勃发展,在这个大环境下文章探索基于Mixly+Arduino创客课程在小学高年级校本课程实施,张可玉珠海市斗门区实验小学 519100摘要:创客教育蓬勃发展,在这个大环境下文章探索基于Mixly+Arduino创客课程在小学高年级校本课程实施,首先以《震动传感器》一课为例呈现了创客课程的实施过程,接着提炼在实施过程中的思考和反思:Mixly+Arduino软硬件相结合,能极大激发学生的学习积极性与参与热情;创客教育以小组合作形式开展,培养学生的协作学习能力;阶梯式的任务设计,能促进学生创新能力的提升;开展项目式学习,可以培养学生自主学习能力;同时实施过程中也面临着一些问题。
最后进行总结和展望。
关键词:创客教育;Mixly;Arduino;小学一、背景近年来,创客教育蓬勃发展,开源软硬件逐渐普及,它也来到了我们中小学课堂,为中小学的创新教育点燃了燎原之火。
为了实现让学生“享受创新与分享的快乐”这一目标,中小学开展了多种多样的创客教育,比如基于 Scratch 的创意编程、基于 Arduino 的创意电子、基于 AppInventor 的创意 APP、基于 3D 打印的创意设计以及各类机器人相关课程等。
其中,基于Mixly+Arduino的创意电子因课程开设简单、容易激发学生学习积极性、便于学生开展创新和较好进行成果展示等特点,成为了当前创客教育的主流[1]。
我校将Mixly+Arduino创客教育引入学校校本课程,在摸索中前行,让 “开放、创新、体验、探究”的创客教育理念在我校教学中生根发芽,通过Mixly+Arduino创客课程让学生享受创新与分享的快乐,培养学生的创新能力。
我们发现Arduino作为一款开源电子平台,有着很强的易用性和扩展性,该平台无需学生掌握复杂的编程语言,只需要有程序设计思路和了解相关函数用法就可进行将想法变成现实。
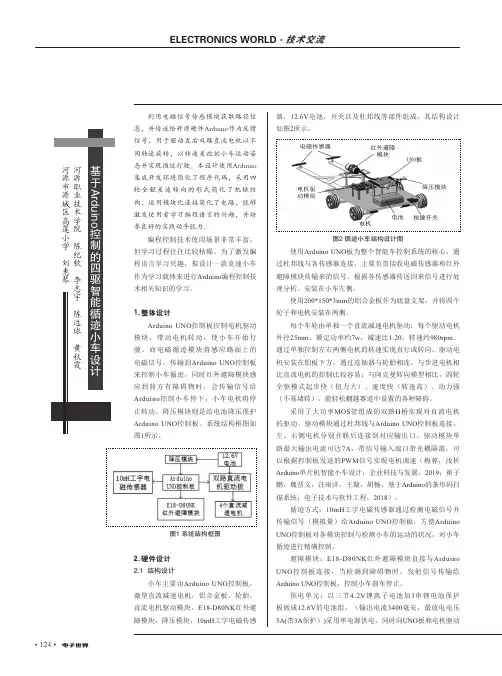
• 124•利用电磁信号传感模块获取路径信息,并传送给开源硬件Arduino作为反馈信号,用于驱动左右双路直流电机以不同转速旋转,以转速差控制小车运动姿态并实现循迹行驶。
本设计使用Arduino 集成开发环境简化了程序代码,采用四轮全驱差速转向的形式简化了机械结构,运用模块化连接简化了电路,能够激发使用者学习编程语言的兴趣,并培养良好的实践动手能力。
编程控制技术使用场景非常丰富,但学习过程往往比较枯燥。
为了激发编程语言学习兴趣,拟设计一款竞速小车作为学习载体来进行Arduino 编程控制技术相关知识的学习。
1.整体设计Arduino UNO 控制板控制电机驱动模块,带动电机转动,使小车开始行驶。
而电磁循迹模块将感应路面上的电磁信号,传输到Arduino UNO 控制板来控制小车循迹,同时红外避障模块感应到前方有障碍物时,会传输信号给Arduino 控制小车停下,小车电机将停止转动。
降压模块则是给电池降压保护Arduino UNO 控制板。
系统结构框图如图1所示。
图1 系统结构框图2.硬件设计2.1 结构设计小车主要由Arduino UNO 控制板,微型直流减速电机,铝合金板,轮胎,直流电机驱动模块,E18-D80NK 红外避障模块,降压模块,10mH 工字电磁传感器,12.6V 电池,开关以及杜邦线等部件组成,其结构设计如图2所示。
图2 循迹小车结构设计图使用Arduino UNO 板为整个智能车控制系统的核心,通过杜邦线与各传感器连接,主要负责接收电磁传感器和红外避障模块传输来的信号,根据各传感器传送回来信号进行处理分析。
安装在小车左侧。
使用200*150*3mm 的铝合金板作为底盘支架,并将四个轮子和电机安装在两侧。
每个车轮由单独一个直流减速电机驱动,每个驱动电机外径25mm ,额定功率约7w ,减速比1:20,转速约980rpm 。
通过单独控制左右两侧电机的转速实现直行或转向。
驱动电机安装在铝板下方,通过连轴器与轮胎相连。
arduino避障小车课程设计一、课程目标知识目标:1. 学生能理解Arduino的基本原理,掌握其编程基础。
2. 学生能掌握避障小车的工作原理,了解传感器在其中的作用。
3. 学生能了解电路连接的基本方法,能正确连接Arduino、电机驱动和传感器。
技能目标:1. 学生能运用Arduino编程,实现避障小车的控制。
2. 学生能通过实际操作,提高动手能力,培养解决问题的能力。
3. 学生能通过团队协作,完成避障小车的搭建和调试。
情感态度价值观目标:1. 学生能培养对科学技术的兴趣,激发创新精神。
2. 学生能培养合作意识,提高沟通能力,学会团队协作。
3. 学生能在实践中体会科技带来的乐趣,树立正确的价值观。
课程性质:本课程为实践性较强的课程,注重培养学生的动手能力、创新精神和团队协作能力。
学生特点:六年级学生具备一定的逻辑思维能力和动手能力,对新鲜事物充满好奇,喜欢挑战。
教学要求:教师需结合学生特点,以引导为主,注重激发学生的兴趣,鼓励学生主动探究,培养学生的实践能力和创新能力。
在教学过程中,将课程目标分解为具体的学习成果,以便于教学设计和评估。
二、教学内容1. Arduino基础知识:- Arduino原理与结构- 编程基础:变量、数据类型、运算符、控制结构等- 传感器原理:红外传感器、超声波传感器等2. 避障小车工作原理:- 小车结构及各部件功能- 避障原理及实现方法3. 电路连接与编程:- 电机驱动连接与控制- 传感器与Arduino的连接- 编写程序实现避障功能4. 实践操作:- 搭建避障小车- 调试与优化程序5. 团队协作与展示:- 分组合作完成任务- 展示与分享作品教学内容安排与进度:第一课时:Arduino基础知识学习,了解小车结构与避障原理第二课时:学习传感器原理,进行电路连接与编程基础第三课时:动手搭建避障小车,进行初步调试第四课时:优化程序,实现稳定避障功能,团队协作与展示教材关联:教学内容与教材中“机器人制作与应用”章节相关,结合教材内容,使学生能够掌握Arduino编程及机器人制作的基本技能。
Arduino智能小车设计报告摘要本报告介绍了一个基于Arduino的智能小车设计方案。
该小车具备避障、遥控和自动巡线三种功能。
通过使用Arduino开发板、超声波传感器、小车底盘、遥控模块、巡线模块等组件,实现了智能小车的设计与制作。
本报告详细描述了硬件组成、软件开发和功能实现过程,并进行了实验验证。
介绍智能小车是一种能够自主避障、遥控和巡线的机器人。
它广泛应用于室内导航、仓储物流等领域。
本设计基于Arduino开发板,利用其强大的控制能力和丰富的扩展接口,实现了智能小车的多种功能。
设计方案硬件组成•Arduino Uno开发板:作为控制核心。
•小车底盘:提供运动平台。
•超声波传感器:用于实现避障功能。
•遥控模块:实现遥控功能。
•巡线模块:实现自动巡线功能。
•电源模块:提供电力支持。
软件开发Arduino IDE使用Arduino IDE作为开发工具,编写C++代码进行控制逻辑的开发。
IDE提供了很多内置的库和函数,使编程工作更加便捷。
```cpp // 代码示例:超声波传感器测距 #include <Ultrasonic.h>Ultrasonic ultrasonic(12, 13); // 超声波传感器接口定义void setup() { Serial.begin(9600); // 串口初始化 }void loop() { long distance = ultrasonic.Ranging(CM); // 以厘米为单位测距Serial.print(。
arduino智能小车课程设计一、课程目标知识目标:1. 掌握Arduino的基本原理和编程方法;2. 了解智能小车各部件的功能和协同工作原理;3. 学习传感器的工作原理,并运用到智能小车控制中;4. 掌握基本的电路连接和调试方法。
技能目标:1. 能够编写简单的Arduino程序,实现智能小车的控制;2. 能够独立组装和调试智能小车;3. 能够运用所学知识解决智能小车在运行过程中遇到的问题;4. 能够通过团队协作,完成智能小车的设计和制作。
情感态度价值观目标:1. 培养学生对电子制作和编程的兴趣,激发创新意识;2. 培养学生动手能力、逻辑思维能力和问题解决能力;3. 培养学生团队协作精神,提高沟通与表达能力;4. 引导学生关注科技发展,树立科技改变生活的观念。
课程性质:本课程为实践性课程,注重培养学生的动手能力和创新能力。
学生特点:学生具备一定的物理知识和数学基础,对电子制作和编程有一定兴趣。
教学要求:教师需引导学生主动探究,关注学生个体差异,鼓励学生创新思维和团队协作。
教学过程中注重理论与实践相结合,确保学生能够学以致用。
通过课程学习,使学生能够达到上述课程目标,为后续相关课程打下坚实基础。
二、教学内容1. Arduino基础知识:- Arduino原理与结构;- 编程环境搭建与使用;- 基本编程语法与逻辑控制;- 常用函数库介绍。
2. 智能小车硬件组成:- 小车各部件功能与选型;- 电机驱动原理与接线方法;- 轮胎与传动系统介绍;- 电池选择与使用。
3. 传感器与模块:- 常用传感器原理与应用;- 超声波传感器测距;- 红外线传感器避障;- 陀螺仪与加速度传感器;- 模块间的通信与协作。
4. 小车控制程序编写:- 基本运动控制(前进、后退、转向);- 路径规划与避障算法;- 传感器数据采集与处理;- 程序调试与优化。
5. 实践与拓展:- 小车组装与调试;- 创意功能拓展(如:手机APP控制、自动驾驶等);- 团队协作项目实践;- 课程总结与成果展示。
arduino智能小车的工作原理Arduino智能小车是一款由Arduino主板控制的智能移动机器人,它可以根据预设程序完成各种任务,其工作原理主要包括以下几个步骤:1.控制器控制小车运动Arduino主板作为控制器,通过内置的电路和编程语言控制小车的运动。
它可以根据指令控制小车前进、后退、左转、右转等。
同时,Arduino还具备多种传感器接口,可以与多种外设传感器配合使用。
2.传感器采集环境信息Arduino智能小车还配备了多种外设传感器,包括温度传感器、光敏传感器、超声波传感器等。
通过这些传感器,小车可以采集周围环境的信息,识别障碍物、测量距离、感知光线等。
这些信息可以给Arduino主板提供更为准确的数据,使得智能小车的行驶更为稳定、安全。
3.内部逻辑判断行动方向Arduino智能小车通过内部逻辑程序,根据接收来自传感器的信息判断行动方向。
例如,当超声波传感器检测到前面有障碍物时,Arduino主板就会发送左转或右转的指令,以避开障碍物。
或者当光敏传感器检测到环境光线弱时,Arduino主板就会发送向光线强的方向行驶的指令。
4.马达转动驱动车轮行驶Arduino智能小车配有马达和车轮,马达通过接收Arduino主板的指令,控制马达转动,从而驱动车轮行驶。
在前进或后退的情况下,左右轮转速相等,小车将直线行驶;而在左转或右转的情况下,控制左右轮转速不同,小车将会实现转向。
综上所述,Arduino智能小车主要通过控制器控制小车运动、传感器采集环境信息、内部逻辑判断行动方向以及马达转动驱动车轮行驶等步骤实现其工作原理。
通过这些步骤的相互配合,Arduino智能小车可以智能化地完成各种任务,如巡线、避障、物品搬运等。
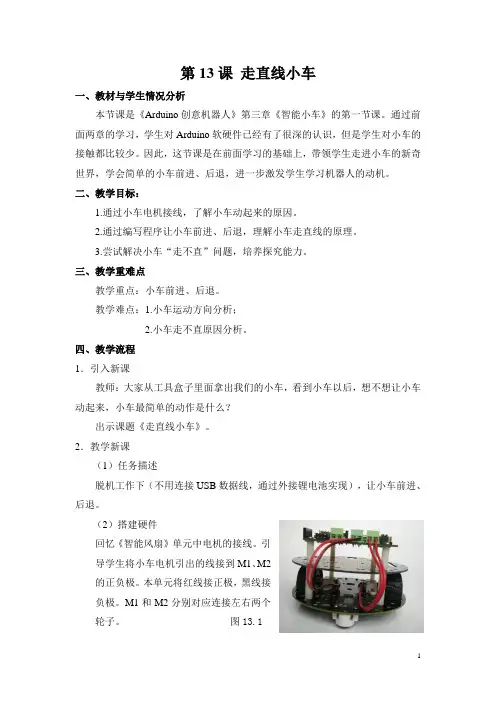
第13课走直线小车一、教材与学生情况分析本节课是《Arduino创意机器人》第三章《智能小车》的第一节课。
通过前面两章的学习,学生对Arduino软硬件已经有了很深的认识,但是学生对小车的接触都比较少。
因此,这节课是在前面学习的基础上,带领学生走进小车的新奇世界,学会简单的小车前进、后退,进一步激发学生学习机器人的动机。
二、教学目标:1.通过小车电机接线,了解小车动起来的原因。
2.通过编写程序让小车前进、后退,理解小车走直线的原理。
3.尝试解决小车“走不直”问题,培养探究能力。
三、教学重难点教学重点:小车前进、后退。
教学难点:1.小车运动方向分析;2.小车走不直原因分析。
四、教学流程1.引入新课教师:大家从工具盒子里面拿出我们的小车,看到小车以后,想不想让小车动起来,小车最简单的动作是什么?出示课题《走直线小车》。
2.教学新课(1)任务描述脱机工作下(不用连接USB数据线,通过外接锂电池实现),让小车前进、后退。
(2)搭建硬件回忆《智能风扇》单元中电机的接线。
引导学生将小车电机引出的线接到M1、M2的正负极。
本单元将红线接正极,黑线接负极。
M1和M2分别对应连接左右两个轮子。
图13.1(3)编写程序(仅作参考)单击模块,将指令拖曳到脚本区,设置电机M1数值,通过复制,快速设置电机M2。
(如下图)21图13.23图13.3(4)编译上传程序编写完成,单击,再单击。
【提示】在测试时,可以使用锂电池给小车供电,便于测试。
当提示上传成功后,拔掉USB数据线,接上锂电池,就可以观察脱机工作下,小车前进。
想一想:怎样让小车后退呢?【提示】M1、M2数值相同,正负就可以让它的方向反过来了。
只要在转速数值前面加一个“-”号就可以实现了。
3.拓展探究观察小车,看其是否能走一条直线。
思考小车为什么“走不直”。
阅读“我要读”,进一步了解小车“走不直”原因以及解决方法。
观察自己的小车前进路线,微调左右电机数值,使其尽量走直线。
摘要智能小车是移动机器人学的一个重要分支,是当今从业余爱好者到研究人员中最受欢迎的项目之一,应用广泛,在文化与生活中也起到越来越大的作用。
从长远来看,它未来不管在民用还是军事亦或是太空开发等领域有着不错的前景与发展空间,随着时代的发展,人工智能也日益受人们所青睐。
本文主要设计任务的制作一辆基于Arduino的麦克纳姆轮绘图小车,并编写合适的程序使得用户可以通过安卓手机蓝牙来控制小车的移动以及笔架的升降,从而达到绘图目的。
文章对小车的车体设计及整体框架进行了描述,对小车的各个模块也进行了相应介绍。
文章介绍了本次所使用的ATmega328开发板与麦克纳姆轮的运动原理,通过对Arduino平台和keil软件的使用编写了控制小车运作的主程序与控制笔架升降的STC 单片机程序。
文章末尾为本次设计所遇到的问题以及对应心得的描写,也有对本次毕业设计的一些改进的想法。
本次毕业设计所完成的智能小车基本达到预期所想,具有很大的推广价值,可以实现可靠的全向移动能力,性能可靠。
关键词:Arduino麦克纳姆轮蓝牙控制智能小车AbstractSmart car is an important branch of mobile robotics . It is today's researchers from amateur to one of the most popular items, widely used, in culture and also play a more and more important role in the life. In the long run, its future development both in civil and military or space, and other fields has a good prospects and development space, with the development of The Times, artificial intelligence is increasingly popular with people.In this paper, the main design task of making a glossy mu wheel drawing based on the Arduino car, and write the right program that allows users to android bluetooth to control the movement of the car and the rise and fall of pen rack, so as to achieve mapping purpose. This paper describes the vehicle body design and the overall frame, and introduces the module of the car.ATmega328 used by this article introduces the development board and the department's kinematic principle of wheel, through the use of the Arduino platform and keil software the write operation is to control the car pen rack main program and control of the elevator on STC microcontroller program. At the end of the article, there are some Suggestions for the design of this design.This graduate design complete intelligent car achieves the expected, has great popularization value, can realize omnidirectional mobile ability, reliable performance and reliability.Key words: Arduino Mecanum wheel bluetooth control smart car目录第一章绪论 (1)1.1 选题背景及意义 (1)1.2 国内外研究现状 (1)1.3 课题的主要研究内容 (2)第二章硬件介绍 (3)2.1 Arduino介绍 (3)2.1.1 Arduino开发板的选择 (3)2.1.2 Arduino拓展板 (6)2.2 麦克纳姆轮介绍 (6)2.2.1 麦克纳姆轮原理 (7)2.2.2 麦克纳姆轮运动分析 (7)2.2.3 全向运动的实现 (9)2.3 蓝牙模块的选择 (12)2.4 L293驱动控制板 (13)第三章程序的调用及编写 (15)3.1 类库的编写及调用 (15)3.1.1 简介 (15)3.1.2 库文件的改用 (15)3.2 Arduino主程序的编写 (18)3.3 STC单片机程序的编写 (21)第四章程序的烧录 (26)4.1 Arduino的烧录 (26)4.2 STC单片机的烧录 (27)第五章小车模型及操作流程 (29)5.1 小车的最终成品 (29)5.2 流程示意 (30)第六章总结与不足 (31)6.1 课题总结 (31)6.2 问题与不足 (32)致谢 (33)参考文献 (34)第一章绪论1.1 选题背景及意义如今,多智能体系统(Multi-Agent System)已经被给予越来越多的研究和重视。
某小学编程机器人“创客”实验室建设方案一、引言在当今科技飞速发展的时代,编程和机器人技术正逐渐成为孩子们必备的技能。
为了培养学生的创新思维、实践能力和科技素养,我校计划建设一个编程机器人“创客”实验室,为学生提供一个探索科技、发挥创意的平台。
二、建设目标1、提供一个充满创新和实践氛围的学习环境,激发学生对编程和机器人技术的兴趣。
2、培养学生的逻辑思维、问题解决能力和团队合作精神。
3、让学生在动手实践中掌握编程和机器人的基本原理和操作技能。
4、鼓励学生发挥创意,设计和制作自己的机器人作品,培养创新能力。
三、实验室场地规划1、教学区配备多媒体教学设备,如投影仪、电子白板等,用于理论教学和演示。
放置可移动桌椅,方便学生分组讨论和实践。
2、实践操作区设立多个工作桌,每个工作桌配备电源插座、工具抽屉等。
放置各类机器人套件、编程设备和工具,如乐高机器人、Arduino开发板、电脑等。
3、展示区展示学生的优秀作品,激发学生的成就感和竞争意识。
张贴编程和机器人相关的知识海报,营造科技氛围。
4、储物区存放机器人套件、工具、教材等物品,分类整理,便于取用和管理。
四、设备与材料配置1、机器人套件选择适合小学生年龄和能力的机器人套件,如乐高 Education SPIKE Prime 套装、Makeblock mBot 机器人等。
配备多种传感器和执行器,如超声波传感器、颜色传感器、电机、舵机等,以满足不同项目的需求。
2、编程设备为每个学生配备一台电脑,安装适合小学生的编程软件,如Scratch、Python 等。
提供编程控制器,如 Arduino Uno、Raspberry Pi 等,让学生能够进行硬件编程。
3、工具与材料配备基本的工具,如螺丝刀、剪刀、钳子等。
准备各类电子元件、电线、板材等材料,供学生制作机器人结构。
4、教材与课程资源采购相关的教材和图书,如《小学生机器人编程入门》《创意机器人制作》等。
订阅在线课程资源,如网易云课堂、慕课网等平台上的相关课程。
灰姑娘四年级读书笔记10篇《灰姑娘》读书笔记读完灰姑娘,我明白了每个人都要有纯洁的心,跟人交往不能心有偏见,不能像灰姑娘的两个坏姐姐呢,做事只想自己。
老是欺负灰姑娘,要像灰姑娘一样心地纯洁,善良,平等友好地对待每一个人。
才能苦尽甘来。
和王子生活在一起,我真为他高兴。
《灰姑娘》读书笔记前几天,我再次读了《灰姑娘》的童话故事书,感触颇深。
这个故事的主要内容是:从前,有一个善良的女孩,她的继母是一个心肠狠毒的女人,她还带来两个姐姐常常欺负她,晚上让她睡在炉灰里,所以她总是满身灰尘,大家都叫她“灰姑娘”。
在一次舞会上,灰姑娘得到了王子的喜爱,经过很多的折磨,最终,王子和灰姑娘幸福的生活在一起。
读了这个故事,我们要向灰姑娘学习,做一个善良、勤劳的人。
只要不灰心,不放弃,就一定会实现自己美好的愿望。
灰姑娘读书笔记灰姑娘的故事,讲的是以前有一个富人,钱多的数不完,可是他的妻子病的很厉害,快死时,她把女儿叫到床前,告诉她要做一个诚实、善良的人,说完就死了。
我看到这里,想起了我有一次说谎。
一天,妈妈上班,我一个人在家看起电视来,突然听到了妈妈的脚步声,我立刻关上电视,把布盖上。
妈妈认为我学习累了,于是同意我看电视,我每当想起时,我不该去骗妈妈,我很内疚。
等我看完灰姑娘的故事,她勇敢、孝敬父母,努力地去改变自己的命运。
使我明白了一个道理,人应当在任何环境下,不丧气,不放弃,积极面对任何困难,我们要学习灰姑娘那不屈不挠的精神,坚持自己的信念,改变自己的命运。
灰姑娘读书笔记寒假里,爸爸买了一本《格林童话》。
书里的每个童话故事都深深地吸引着我,特别是《灰姑娘》,看了之后让我深有感触。
灰姑娘很勤劳,她每天天不亮就起来挑水、生火、做饭、洗衣;灰姑娘很善良,把小鸟当做朋友,经常与小鸟说话;她很淳朴,不要漂亮衣裳,不要珍珠钻石,只要父亲回家路上碰着帽子的第一根树枝;她很守时,虽然每次参加舞会都没尽兴,但她总是在午夜来临时准时离开。
中小学生“创客”教育之我见作者:李文平来源:《中学课程辅导·教学研究(下)》 2017年第10期摘要:本文从创客教育课程建设的角度,总结了中小学校创客教育课程建设的多元思路,如建设“创客空间”“大课程群”“展示平台和文化”等;以及多层次创客课程内容,如开源硬件、3D打印、激光切割机、机械制作设备等硬件和Scratch,App Inventor等软件的学习。
关键词:课程;创客;中小学创客教育是一种回归生活的教育,是一种指向“创造”的教育,是直面生存、表达智慧的综合教育,其教学过程遵循“创造”实践的规律,融合STEAM教育理念、项目学习理念,强调独立构建目标、独立应用工具开展创造、共享智慧、优化迭代、形成成果,是能够带来完整思维链条的教育形式,也是一种独特而务实的创新人才培养系统、全人教育系统。
创客运动与教育的碰撞逐渐改变着教育的观念、功能、目标、内容、方法等要素,教育拥抱创客运动的关键在于保留其最精彩的部分,即在教学过程中始终保持以学习者的学习为中心的态度,学校要真正从知识传授中心,转变成以实践应用和创造为中心的场所,让学生用“自由的双手表达自信的头脑”,这正是基础教育课程改革的核心价值取向。
一、融合理念,提供创客小空间“融合”是课程建设的方向,也是建设创客空间的重要因素。
把握跨学科、智能化、软硬结合的原则,融合学校现有资源,大力推进创客空间建设,如建设“创客学坊”“创意长廊”“行知科坊”“3D梦工厂”“鲁班工坊”“陶艺创意吧”等,融创客教育、科技创意、木工创意、艺术创意于一体,包含创造区、材料区、活动区、讨论区、阅读区、展示区等功能区,为“大创客”科创体验课程群的实施提供空间保障。
二、整合学科,构建创客大课程1.基础性与拓展性课程整合基础性课程普惠全员,拓展性课程对应兴趣,如表1所示。
2.信息技术、艺术、科学、技术整合综合信息技术课程校本化,难度阶梯式推进,如Scratch基础课程、APP inventor基础课程、Arduino创意教学、智能机器人,如图所示:课程整合改革起始阶段以德育类课程、信息技术、综合实践类课程的整合实施为重点,体现兼顾、整合、体验原则,通过整合课内课外资源,起到普惠和提高,实践和展示的作用。