二维PIV测速方向二义性的数值解决方法
- 格式:pdf
- 大小:199.88 KB
- 文档页数:6

二维谱图数据处理1. 等高线显示的设定2打开文件,谱图在文件处理窗口中显示,如下图再点击图中红框按钮,打开谱图浏览窗口1. 等高线显示的设定在二维数据显示区域内长按鼠标右键,从弹出的菜单中选择[Level tool]。
4等高线水平按钮临界值水平线噪声水平线基线水平线应用按钮底部滑条预设按钮顶部滑条偏置滑条等高线水平工具设定使用等高线的数并自动选择所使用的等高线。
按钮凹下为选择凸出为非选择左边对应负峰右边对应正峰移动偏置滑条时,图中央的曲线斜率发生变化。
将偏置滑条向上方移动时,信号强度低的位置处的等高线增加一般使用偏置滑条和水平按钮来调整等高线。
2. 2D 图谱相位校正(大多数2D谱不用相位校正,NOESY和TOCSY有时候需要)步骤:打开2D数据处理窗口;依次点击按钮 ,选择宽范围的两点,点击图标 展开52. 2D 图谱相位校正步骤:再点击按钮 进行相位校正;点击按钮 完成校正。
63. 2D 图谱基线(以F2维为例)及平滑处理(NOESY 中常用)打开2D 浏览器;依次点开Actions_Base Correct _Transpose 0Actions_Smooth 平滑处理7基线噪声若要校正F1维基线,请选择Transpose 1噪声被抑制平滑处理工具4. 化学位移标定8打开2D 浏览窗口,依次按图中 顺序操作鼠标选中信号中心位置,即将该位置的化学位移定为参考位移在此处输入X 轴与Y轴对应的一维数据中的参考化学位移的值5. 一维高清数据粘贴9步骤:选择手指按钮 ; 鼠标图形变成手指形状;点开Layout_Load 1D_Load X + Y Projections 点击要粘贴的高清谱图如果X 轴与Y 轴数据不同,请选择LoadX Projection Load Y Projection 分别导入6. 二维数据的堆叠与对比10与一维谱图堆叠类似,依次以下图中 的顺序点击相应按钮绿色褐色也可点击按钮删除谱图7. 同步二维谱图横纵轴坐标11在数据书写板中打开需要同步的谱图,点击Tools_GeometryTools_ConnectionTool,如左图所示点击手指按钮 ,选择文件;再选择需要同步的轴,最后点击Connect同等尺寸缩放1213 连接之后,缩放其中一个图的横纵坐标时,另一图也随之改变图A放大若要结束同步显示功能,需点击断开按钮同等放大图B。
粒子影像测速(PIV)技术概述1.PIV技术介绍1.1.引言目前为止,人类对流体力学仍有许多疑难问题,如对湍流、非定常流动等现象了解甚少,而在许多工程应用如飞行器外形设计、燃机燃烧室中的多相流动等中又迫切需要解决这些问题,因而使流场测量问题变得极为重要。
流场测速新方法研究中,至今已发展了激光多普勒测速LDV(Laser Doppler Velocimetry)、粒子影像测速PIV(Particle Image Velocimetry)等技术。
LDV的综合性能较高,具有高精度、高分辨率和非接触测量等优点,通常作为仪器标校技术使用,但LDV 只能实现单点测量。
PIV技术是一种全场、动态、非接触测量手段,已获得广泛使用,成功应用于风洞、水洞、水槽燃烧及喷射等实验中。
PIV研究始于上个世纪80年代,随着光学和计算机图像处理技术的迅猛发展,PIV取得了长足进步,测量精度已与LDV 接近。
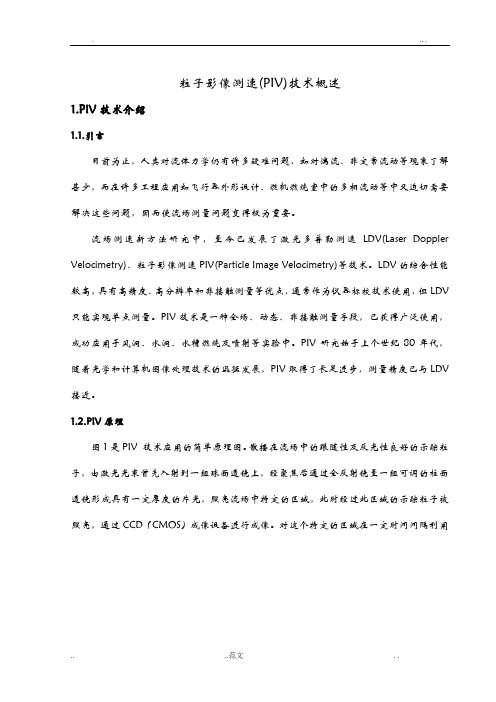
1.2.PIV原理图1是PIV 技术应用的简单原理图。
散播在流场中的跟随性及反光性良好的示踪粒子,由激光光束首先入射到一组球面透镜上,经聚焦后通过全反射镜至一组可调的柱面透镜形成具有一定厚度的片光,照亮流场中特定的区域,此时经过此区域的示踪粒子被照亮,通过CCD(CMOS)成像设备进行成像。
对这个特定的区域在一定时间间隔利用图1 PIV简单原理图激光脉冲连续照亮两次,就能得到粒子在第一次照亮时间t 和第二次照亮时间t’的两个图像,对这两幅图像进行互相关分析,就能得到流场部的二维速度矢量分布。
在利用PIV 技术测量流速时,需要在二维流场中均匀散布跟随性、反光性良好且比重与流体相当的示踪粒子。
将激光器产生的光束经透镜散射后形成厚度约1 mm 的片光源入射到流场待测区域,CCD 摄像机以垂直片光源的方向对准该区域。
利用示踪粒子对光的散射作用,记录下两次脉冲激光曝光时粒子的图像,形成两幅PIV 底片(即一对相同待测区域、不同时刻的图片) ,底片上记录的是整个待测区域的粒子图像。


二维运动模糊图像的处理二维运动模糊是数字图像处理中常见的一种模糊形式,它是由于物体或相机在图像采集或传输过程中的运动造成的。
二维运动模糊通常表现为图像中物体在运动方向上出现模糊延伸的现象,这会导致图像细节的丢失,降低图像的清晰度和质量。
针对二维运动模糊图像的处理是数字图像处理中的重要课题,本文将介绍二维运动模糊图像的特点和处理方法,希望可以为相关领域的研究和应用提供一定的帮助。
一、二维运动模糊图像的特点1. 延伸模糊二维运动模糊图像的最显著特点就是物体在运动方向上呈现延伸模糊的现象。
这种模糊形式通常是由于图像中物体或相机的运动造成的,例如快门相机移动、物体运动等。
2. 高频细节丢失二维运动模糊会导致图像中的高频细节丢失,图像清晰度降低,局部细节信息模糊不清,影响图像的观感和识别效果。
3. 影像质量降低由于二维运动模糊导致的图像清晰度下降和细节丢失,整体的图像质量也将受到影响,降低图像的识别和分析效果。
二、处理二维运动模糊图像的方法针对二维运动模糊图像,可以采用以下几种主要的处理方法进行处理,以尽可能地恢复图像的清晰度和细节信息。
1. 基于退化模型的复原方法基于退化模型的复原方法是一种较为常用的二维运动模糊图像处理方法。
该方法通过建立图像的退化模型,从数学上描述了二维运动模糊的产生过程,然后利用逆滤波、维纳滤波等数学方法对图像进行复原。
该方法需要先估计出图像的模糊参数,然后根据模糊参数进行复原处理。
但是该方法对图像噪声敏感,容易产生伪影和失真。
2. 运动模糊参数估计方法针对二维运动模糊的特点,可以通过运动模糊参数估计方法来获取模糊参数,包括方向、长度、速度等。
一旦获取了准确的模糊参数,就可以利用逆滤波、维纳滤波等算法进行图像处理。
常用的参数估计方法包括Wiener滤波、物体轨迹分析等。
3. 结合超分辨率技术超分辨率技术是一种有效的图像复原方法,可以通过图像内部信息的高效利用和外部信息的引入,从而提高图像的分辨率。

二维运动模糊图像的处理
二维运动模糊是指物体在二维平面上的运动导致图像模糊。
具体而言,当相机快门打开的时间足够长时,物体的运动轨迹会在感光元件上留下痕迹,导致图像产生模糊效果。
这种模糊效果可能会在拍摄快速移动的物体、摄像机晃动或者低光条件下产生。
为了消除二维运动模糊,通常采用图像处理算法来对图像进行复原。
下面将介绍一些常用的方法。
1. 基于逆滤波的复原方法:逆滤波是恢复原始图像的一种基本技术。
假设原始图像可以表示为一个线性系统的输出,那么通过找到该线性系统的逆滤波器,从模糊图像中提取出原始图像。
在实际应用中,逆滤波方法容易受到噪声的干扰,可能导致结果不理想。
2. 统计方法:统计方法是另一种常用的复原方法。
通过统计模糊图像中像素值的分布情况,可以推测出原始图像的分布,并在此基础上进行复原。
统计方法在处理噪声比较多的情况下效果较好,但对于噪声较少的情况效果可能不佳。
3. 图像增强方法:图像增强方法是一种通过增大图像的对比度或者锐化效果来减弱图像模糊的方法。
通过增强图像的边缘信息或者恢复图像的高频细节,可以使图像看起来更加清晰。
4. 基于最小二乘法的复原方法:最小二乘法是一种优化算法,能够找到使得模糊图像与原始图像的差异最小的复原结果。
通过建立一个优化问题,并找到使得问题的目标函数最小的参数值,可以得到最佳的复原结果。
二维运动模糊图像的处理方法有很多种,每种方法都有其适用的场景和局限性。
在实际应用中,需要根据具体情况选择合适的方法来进行处理。

简述二维piv测量方法的原理
二维PIV (Particle Image Velocimetry) 测量方法是一种流体力学实验技术,用于测量流体中的流速。
它基于两个主要原理:图像处理和粒子追踪。
在二维PIV测量中,首先会在被测流体中注入微小颗粒(如烟雾粒子或荧光颗粒),这些颗粒在流体中具有与流体相同的运动特性。
然后,通过使用激光或闪光灯等光源照亮流体中的颗粒,形成立体图像。
图像处理是二维PIV方法的核心。
通过捕捉流体中颗粒的两个连续图像,通过图像处理软件将这些图像分成小的像素,并对每个像素进行亮度分析。
这些亮度值可以表示颗粒的位置。
一旦获得了两个连续图像的位置信息,就可以通过比较两个图像之间颗粒的位移来计算流体中每个位置的流速。
通常采用相关分析方法来进行位移和速度的计算。
粒子追踪是图像处理的一部分,用于跟踪颗粒在连续图像中的位置变化。
通过在连续图像中的相邻位置查找具有相似亮度特征的像素,可以追踪颗粒的运动轨迹。
最终,通过将颗粒的位移转换为速度矢量场,可以获得流体中各个位置的速度分布情况。
这种方法可以提供高时间和空间分辨率的流速测量结果,以获得流体中的细节信息。
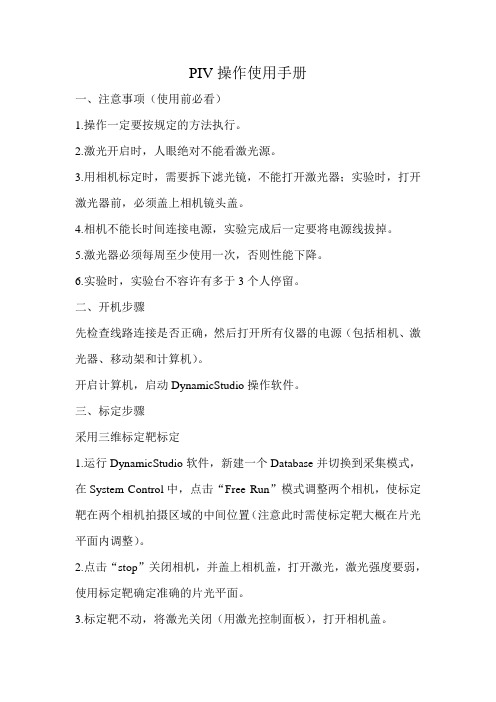
PIV操作使用手册一、注意事项(使用前必看)1.操作一定要按规定的方法执行。
2.激光开启时,人眼绝对不能看激光源。
3.用相机标定时,需要拆下滤光镜,不能打开激光器;实验时,打开激光器前,必须盖上相机镜头盖。
4.相机不能长时间连接电源,实验完成后一定要将电源线拔掉。
5.激光器必须每周至少使用一次,否则性能下降。
6.实验时,实验台不容许有多于3个人停留。
二、开机步骤先检查线路连接是否正确,然后打开所有仪器的电源(包括相机、激光器、移动架和计算机)。
开启计算机,启动DynamicStudio操作软件。
三、标定步骤采用三维标定靶标定1.运行DynamicStudio软件,新建一个Database并切换到采集模式,在System Control中,点击“Free Run”模式调整两个相机,使标定靶在两个相机拍摄区域的中间位置(注意此时需使标定靶大概在片光平面内调整)。
2.点击“stop”关闭相机,并盖上相机盖,打开激光,激光强度要弱,使用标定靶确定准确的片光平面。
3.标定靶不动,将激光关闭(用激光控制面板),打开相机盖。
4.选择Single Frame Mode单帧拍摄模式,采集图片数量输入1,点击Acquire采集图片,选择Do Not Start(此时激光器处于关闭状态),切换到Acquired Data栏,点击Save for Calibration,把数据存为标定数据,确保拍到图片中心及四周都很清楚(调节相机焦距);然后分别向前或向后移动坐标靶,对称的采集几个位置(一般6个就可以,步骤如粗体字所示)。
5.采集并存储完成后,点击采集按钮回到Database模式。
右键点击Calibration里面的FlowSenseEO 4M#1,选择Calibrate...,进去后选择Calibrations,选择Multi Camera Calibration,点OK。
进去后观察绿色网格是否充满整个标定纸,如果没有充满需重新标定(返回第4步),如果充满,点击OK,此时图片下方出现Multi Calibration。

二维运动模糊图像的处理二维运动模糊图像是指由于被摄物体或相机在拍摄过程中的运动而导致的图像模糊现象。
在许多摄影和图像处理应用中,我们经常会遇到二维运动模糊图像,比如在拍摄运动物体时或者拍摄时相机移动等情况下。
为了提高图像的质量和清晰度,我们需要对这些二维运动模糊图像进行处理,以恢复其原始清晰度和细节。
在本文中,我们将讨论二维运动模糊图像的处理方法,包括数学模型的建立、算法的选择和实际应用技巧等内容。
一、二维运动模糊的数学模型在处理二维运动模糊图像之前,我们首先需要建立一个数学模型来描述这种模糊现象。
二维运动模糊可以用一个数学公式来表示,即图像的模糊版本可以被表示为原始图像的线性平均值。
具体来说,对于一个大小为M*N的二维图像I,其经过二维运动模糊之后的模糊图像B可以表示为:B(x, y) = 1/L * Σ[I(x - u*t, y - v*t)], t = 0,1,2,...,L-1(x, y)是图像B中的像素坐标,(u, v)是运动的方向向量,t是时间步长,L是时间步长的总数。
上述公式表示了在运动方向上图像像素的线性平均。
根据上述数学模型,我们可以进一步研究如何通过算法来处理二维运动模糊图像。
二、二维运动模糊图像的处理算法针对二维运动模糊图像的处理,我们可以采用各种各样的算法和方法。
下面我们将介绍一些常用的算法。
1. 经典算法:最小二乘法最小二乘法是一种经典的算法,它可以用于估计图像的运动模糊参数。
这种方法通过最小化像素值的误差来估计运动方向和模糊长度。
最小二乘法可以有效地处理线性运动模糊,但对于非线性运动模糊效果不佳。
2. 运动模糊滤波器运动模糊滤波器是一种专门用于处理二维运动模糊图像的滤波器。
它可以通过对原始图像进行卷积来恢复清晰图像。
运动模糊滤波器可以根据不同的运动参数来调整滤波器的参数,以适应不同的运动模糊情况。
3. 傅里叶变换傅里叶变换是一种广泛应用于图像处理领域的算法,它可以用于处理运动模糊图像。

二维laplace方程dirichlet问题的数值解法本文从理论上研究二维Laplace方程Dirichlet问题的数值解法,目的是开发一种可以快速求解问题的数值方法。
首先回顾了二维Laplace方程的基本概念,它是描述物理系统的变量随空间变化的基础,其标准型为:$$frac{partial^{2} phi}{partial x^{2}} + frac{partial^{2} phi}{partial y^{2}} = 0$$其中Φ是函数空间中的变量,其在X、Y方向上的二阶导数表明空间变量的变化趋势,而Dirichlet问题相当于给出了此方程在边界处的边界条件,可以求出满足此边界条件的解,如下式所示:$$phi(x,y)= Psi(x,y) + int_{Omega}G(x,y,xi,eta)Phi(xi,eta)dxi deta$$其中,Ψ(x,y)是被称为Dirichlet函数的边界函数,G(x,y,ξ,η)是称为格拉德积分核的偏微分方程的同一分量解,σ是有界的较小的空间域Ω。
求解二维Laplace方程的Dirichlet问题的一般方法有两种:一是准极限法(PML),二是有限元法(FEM)。
PML是一种四阶精确的数值求解方法,二维空间Laplace方程Dirichlet问题的多项式系数矩阵是方阵,可以使用Gauss-Seidel迭代求解解析解。
此外,有限元法也可以用于解决二维Laplace方程的Dirichlet问题,它是一种广泛应用于有限元和曲面建模的技术,将实际场景抽象为有限个元素,用有限元函数描述空间中的变量特性,经过迭代求解可以获得问题的数值解。
本文将介绍一种称为“自适应积分网格法”的新型数值求解方法,它使用自适应网格可以更好地求解准确度要求较高的Laplace方程Dirichlet问题。
首先,根据二维Laplace方程的基本原理,构建网格系统,将问题划分为一系列的小型网格,网格的形状可以是正方形、三角形或混合形,划分的小型网格由带有不同边界条件的方程构成。

二阶常微分方程边值问题的数值解法摘要求解微分方程数值解的方法是多种多样的,它本身已形成一个独立的研究方向,其要点是对微分方程定解问题进行离散化.本文以研究二阶常微分方程边值问题的数值解法为目标,综合所学相关知识和二阶常微分方程的相关理论,通过对此类方程的数值解法的研究,系统的复习并进一步加深对二阶常微分方成的数值解法的理解,为下一步更加深入的学习和研究奠定基础.对于二阶常微分方程的边值问题,我们总结了两种常用的数值方法:打靶法和有限差分法.在本文中我们主要探讨关于有限差分法的数值解法.构造差分格式主要有两种途径:基于数值积分的构造方法和基于Taylor展开的构造方法.后一种更为灵活,它在构造差分格式的同时还可以得到关于截断误差的估计.在本文中对差分方法列出了详细的计算步骤和Matlab程序代码,通过具体的算例对这种方法的优缺点进行了细致的比较.在第一章中,本文将系统地介绍二阶常微分方程和差分法的一些背景材料.在第二章中,本文将通过Taylor展开分别求得二阶常微分方程边值问题数值解的差分格式.在第三章中,在第二章的基础上利用Matlab求解具体算例,并进行误差分析.关键词:常微分方程,边值问题,差分法,Taylor展开,数值解The Numerical Solutions ofSecond-Order Ordinary Differential Equations with the Boundary Value ProblemsABSTRACTThe numerical solutions for solving differential equations are various. It formed an independent research branch. The key point is the discretization of the definite solution problems of differential equations. The goal of this paper is the numerical methods for solving second-order ordinary differential equations with the boundary value problems. This paper introduces the mathematics knowledge with the theory of finite difference. Through solving the problems, reviewing what have been learned systematically and understanding the ideas and methods of the finite difference method in a deeper layer, we can establish a foundation for the future learning.For the second-order ordinary differential equations with the boundary value problems, we review two kinds of numerical methods commonly used for linear boundary value problems, i.e. shooting method and finite difference method. There are mainly two ways to create these finite difference methods: i.e. Taylor series expansion method and Numerical Integration. The later one is more flexible, because at the same time it can get the estimates of the truncation errors. We give the exact calculating steps and Matlab codes. Moreover, we compare the advantages and disadvantages in detail of these two methods through a specific numerical example. In the first chapter, we will introduce some backgrounds of the ordinary differential equations and the difference method. In the second chapter, we will obtain difference schemes of the numerical solutions of the Second-Order ordinary differential equations with the boundary value problems through the Taylor expansion. In the third chapter, we using Matlab tosolve the specific examples on the basis of the second chapter, and analyzing the errors.KEY WORDS: Ordinary Differential Equations, Boundary Value Problems, Finite Difference Method, Taylor Expansion, Numerical Solution毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。

ADI隐式交替法三种解法及误差分析(一般的教材上只说第一种)理论部分参看孙志忠:偏微分方程数值解法注意:1.最好不要直接看程序,中间很多公式很烦人的(一定要小心),我写了两天,终于写对了。
2.中间:例如r*(u(i-1,m1,k)+u(i+1,m1,k))形式写成分形式:r*u(i-1,m1,k)+r*u(i+1,m1,k)后面会出错,我也不是很清楚为什么,可能由于舍入误差,或者大数吃掉小数的影响。
3.下面有三个程序4.具体理论看书,先仔细看书(孙志忠:偏微分方程数值解法)或者网上搜一些理论。
Matlab程序:1.function [u u0 p e x y t]=ADI1(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u0(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))]; u0([1 m2+1],j,k)=[exp(0.5*x(j)-t0(k)) exp(0.5*(1+x(j))-t0(k))];endendr=h2/(h1*h1);r1=2*(1-r);r2=2*(1+r);for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r2*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+...h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r2*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend2.function [u p e x y t]=ADI2(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(D'Yakonov交替方向隐格式)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u'(i,j,k)(引入的过渡层),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;y=(0:m2)*h1+0;t=(0:n)*h2+0;t0=(0:n)*h2+1/2*h2;%定义t0是为了f(x,y,t)~=0的情况% for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));%编程时-t0(k)写成了+t0(k),导致错误;endendend%初始条件for i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endend%边界条件for k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))];endendr=h2/(h1*h1);r4=1+r;r5=r/2;for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=r4*u(i,[1 m1+1],k+1)-r5*(u(i-1,[1 m1+1],... k+1)+u(i+1,[1 m1+1],k+1));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendr1=r-r*r;r2=2*(r-1)*(r-1);r3=r*r/2;for k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组% for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=2*r4*ones(1,m1-1);d(1)=r*u0(i,1,k)+r1*(u(i-1,2,k)+u(i,1,k)+u(i+1,2,k)+...u(i,3,k))+r2*u(i,2,k)+r3*(u(i-1,1,k)+...u(i+1,1,k)+u(i-1,3,k)+u(i+1,3,k))+2*h2*f(i,2,k);for l=2:m1-2d(l)=r1*(u(i-1,l+1,k)+u(i,l,k)+u(i+1,l+1,k)+...u(i,l+2,k))+r2*u(i,l+1,k)+r3*(u(i-1,l,k)+...u(i+1,l,k)+u(i-1,l+2,k)+u(i+1,l+2,k))+2*h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r1*(u(i-1,m1,k)+u(i,m1-1,k)+...u(i+1,m1,k)+u(i,m1+1,k))+r2*u(i,m1,k)+...r3*(u(i-1,m1-1,k)+...u(i+1,m1-1,k)+u(i-1,m1+1,k)+u(i+1,m1+1,k))+2*h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);end%回代过程%u0(i,m1,k)=d(m1-1)/b(m1-1);for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=2*r4*ones(1,m2-1);d(1)=r*u(1,j,k+1)+2*u0(2,j,k);for l=2:m2-2d(l)=2*u0(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=2*u0(m2,j,k)+r*u(m2+1,j,k+1);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend3.function [u u0 p e x y t]=ADI5(h1,h2,m1,m2,n)%ADI解二维抛物线型偏微分方程(P-R交替隐式,未截断)%此程序用的是追赶法解线性方程组%h1为空间步长,h2为时间步长%m1,m2分别为x方向,y方向网格数,n为时间网格数%p为精确解,u为数值解,e为误差%定义u0(i,j,k)=u(i,j,k+1/2),因为矩阵中,i,j,k必须全为整数x=(0:m1)*h1+0;%定义x0,y0,t0是为了f(x,t)~=0的情况%y=(0:m2)*h1+0;t=(0:n)*h2+0; t0=(0:n)*h2+1/2*h2;for k=1:n+1for i=1:m2+1for j=1:m1+1f(i,j,k)=-1.5*exp(0.5*(x(j)+y(i))-t0(k));endendendfor i=1:m2+1for j=1:m1+1u(i,j,1)=exp(0.5*(x(j)+y(i)));endendfor k=1:n+1for i=1:m2+1u(i,[1 m1+1],k)=[exp(0.5*y(i)-t(k)) exp(0.5*(1+y(i))-t(k))]; u1(i,[1 m1+1],k)=[exp(0.5*y(i)-t0(k)) exp(0.5*(1+y(i))-t0(k))] ;endendr=h2/(h1*h1);r1=2*(1-r);r2=r/4;r3=2*(1+r);for k=1:nfor i=2:m2u0(i,[1 m1+1],k)=u1(i,[1 m1+1],k)-r2*(u(i-1,[1 m1+1],k+1)-...2*u(i,[1 m1+1],k+1)+u(i+1,[1 m1+1],k+1)-u(i-1,[1 m1+1],k)+...2*u(i,[1 m1+1],k)-u(i+1,[1 m1+1],k));endendfor k=1:n+1for j=1:m1+1u([1 m2+1],j,k)=[exp(0.5*x(j)-t(k)) exp(0.5*(1+x(j))-t(k))];endendfor k=1:n %外循环,先固定每一时间层,每一时间层上解一线性方程组%for i=2:m2a=-r*ones(1,m1-1);c=a;a(1)=0;c(m1-1)=0;b=r3*ones(1,m1-1);d(1)=r*u0(i,1,k)+r*(u(i-1,2,k)+u(i+1,2,k))+r1*u(i,2,k)+... h2*f(i,2,k);for l=2:m1-2d(l)=r*(u(i-1,l+1,k)+u(i+1,l+1,k))+r1*u(i,l+1,k)+...h2*f(i,l+1,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m1-1)=r*u0(i,m1+1,k)+r*(u(i-1,m1,k)+u(i+1,m1,k))...+r1*u(i,m1,k)+h2*f(i,m1,k);for l=1:m1-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu0(i,m1,k)=d(m1-1)/b(m1-1); %回代过程%for l=m1-2:-1:1u0(i,l+1,k)=(d(l)-c(l)*u0(i,l+2,k))/b(l);endendfor j=2:m1a=-r*ones(1,m2-1);c=a;a(1)=0;c(m2-1)=0;b=r3*ones(1,m2-1);d(1)=r*u(1,j,k+1)+r*(u0(2,j-1,k)+u0(2,j+1,k))+r1*u0(2,j,k)+...h2*f(2,j,k);for l=2:m2-2d(l)=r*(u0(l+1,j-1,k)+u0(l+1,j+1,k))+r1*u0(l+1,j,k)+... h2*f(l+1,j,k);%输入部分系数矩阵,为0的矩阵元素不输入%一定要注意输入元素的正确性endd(m2-1)=r*u(m2+1,j,k+1)+r*(u0(m2,j-1,k)+u0(m2,j+1,k))...+r1*u0(m2,j,k)+h2*f(m2,j,k);for l=1:m2-2 %开始解线性方程组消元过程a(l+1)=-a(l+1)/b(l);b(l+1)=b(l+1)+a(l+1)*c(l);d(l+1)=d(l+1)+a(l+1)*d(l);endu(m2,j,k+1)=d(m2-1)/b(m2-1); %回代过程%for l=m2-2:-1:1u(l+1,j,k+1)=(d(l)-c(l)*u(l+2,j,k+1))/b(l);endendendfor k=1:n+1for i=1:m2+1for j=1:m1+1p(i,j,k)=exp(0.5*(x(j)+y(i))-t(k)); %p为精确解 e(i,j,k)=abs(u(i,j,k)-p(i,j,k)); %e为误差endendend[up e x y t]=ADI2(0.01,0.001,100,100,1000);surf(x,y,e(:,:,1001)) t=1的误差曲面下面是三种方法的误差比较:1.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)(t=1时的误差)2.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) surf(x,y,e(:,:,11))(表示t=1时的误差)下面是相关数据:1: [u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00040947 0.00025182 0.00019077 0.00017112 0.000176040 0.00057359 0.00042971 0.00035402 0.00032565 0.000336280 0.00066236 0.00054689 0.00047408 0.00044596 0.000462670 0.00072152 0.00062001 0.00055081 0.00052442 0.000545530 0.00076164 0.0006576 0.00058522 0.00055732 0.000579840 0.00078336 0.00065993 0.00057557 0.00054161 0.000562090 0.00078161 0.00061872 0.00051646 0.00047429 0.000489640 0.00073621 0.0005148 0.00039979 0.00035439 0.000363130 0.00056964 0.00031688 0.00022051 0.0001884 0.000191920 0 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 0.00027006 0.00016305 0.00012104 0.0001071 0.000109950 0.00037754 0.00027817 0.0002253 0.00020483 0.000211160 0.00043539 0.00035386 0.00030207 0.00028124 0.00029140 0.00047398 0.00040104 0.00035113 0.00033111 0.000344050 0.0005003 0.00042535 0.00037309 0.0003519 0.000365710 0.00051479 0.00042699 0.00036681 0.00034164 0.00035410 0.00051415 0.00040056 0.00032887 0.0002985 0.000307640 0.00048504 0.0003335 0.00025411 0.0002221 0.000227060 0.00037609 0.00020532 0.00013956 0.00011718 0.000119020 0 0 0 0 03.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式)e(:,:,11) =Columns 1 through 60 0 0 0 0 00 8.6469e-006 1.4412e-005 1.8364e-005 2.091e-005 2.2174e-0050 1.4412e-005 2.4777e-005 3.2047e-005 3.6716e-005 3.8961e-0050 1.8364e-005 3.2047e-005 4.1789e-005 4.8054e-005 5.1008e-0050 2.091e-005 3.6716e-005 4.8054e-005 5.5353e-005 5.8764e-0050 2.2174e-005 3.8961e-005 5.1008e-005 5.8764e-005 6.2389e-0050 2.2118e-005 3.8698e-005 5.0523e-005 5.8126e-005 6.171e-0050 2.055e-005 3.5581e-005 4.6157e-005 5.2942e-005 5.6197e-0050 1.707e-005 2.8951e-005 3.7128e-005 4.2365e-005 4.4952e-0050 1.0851e-005 1.7698e-005 2.2265e-005 2.5203e-005 2.672e-0050 0 0 0 0 01.[u u0 p e x y t]=ADI1(0.1,0.1,10,10,10)((P-R交替隐式,截断)截断中间过渡层用u(i,j,k+1/2)代替)Columns 7 through 110 0 0 0 00.00020348 0.00026228 0.00038338 0.00066008 00.00038607 0.00048321 0.00064717 0.00091668 00.00052635 0.00064203 0.00081637 0.0010517 00.0006174 0.00074272 0.00092111 0.0011417 00.00065651 0.00078964 0.00097724 0.0012051 00.00064051 0.00078116 0.00098594 0.0012433 00.00056474 0.00070822 0.00093332 0.0012478 00.00042547 0.00055526 0.00078616 0.0011844 00.00022735 0.00030946 0.00049004 0.00092402 00 0 0 0 02.[u u0 p e x y t]=ADI5(0.1,0.1,10,10,10)(P-R交替隐式,未截断)(未截断过渡层u(i,j,)’=u(i,j,k+1/2)-h2^2/4*dy^2dtu(i,j,k+1/2);)Columns 7 through 110 0 0 0 00.00012826 0.00016798 0.00024986 0.00043637 00.00024444 0.00031023 0.00042173 0.00060513 00.00033401 0.00041257 0.00053179 0.00069358 00.00039216 0.00047742 0.00059986 0.00075263 00.00041704 0.00050761 0.00063642 0.00079439 00.00040657 0.0005021 0.00064226 0.00081984 00.00035784 0.000455 0.00060828 0.00082334 00.00026866 0.00035628 0.00051263 0.0007824 00.00014262 0.00019789 0.00031956 0.0006113 00 0 0 0 0 3.[u p e x y t]=ADI2(0.1,0.1,10,10,10)(D'Yakonov交替方向隐格式) Columns 7 through 110 0 0 0 02.2118e-005 2.055e-005 1.707e-005 1.0851e-005 03.8698e-005 3.5581e-005 2.8951e-005 1.7698e-005 05.0523e-005 4.6157e-005 3.7128e-005 2.2265e-005 05.8126e-005 5.2942e-005 4.2365e-005 2.5203e-005 06.171e-005 5.6197e-005 4.4952e-005 2.672e-005 06.1116e-005 5.5803e-005 4.4817e-005 2.6785e-005 05.5803e-005 5.1239e-005 4.1529e-005 2.5153e-005 04.4817e-005 4.1529e-005 3.42e-005 2.126e-005 02.6785e-005 2.5153e-005 2.126e-005 1.3869e-005 00 0 0 0 0。

气液两相流动粒子成像测速技术(PIV 研究进展3许联锋, 陈刚, 李建中, 金上海(西安理工大学水力学研究所, 西安710048 摘要:粒子图像测速技术(PI V 作为一种全新的无扰、瞬态、全场速度测量方法, 已被广泛应用于液体或气体的单相流流速场测定。
对于两相流PI V 技术, 目前还处于起步与发展阶段。
本文对近年来两相PI V 技术的发展及取得的成就进行了回顾, 简要地分析了PI V 技术在两相流测量中的潜在优势及存在的困难, 着重对目前两相流PI V 技术中的关键技术-相分离方法进行了较为详尽的总结与评述, 并对PI V 技术在分散相颗粒尺寸及浓度测量方面的应用进行了讨论。
关键词:多相流体力学; 两相流;PI V ; 相分离方法; 粒径分析; 浓度测量中图分类号:T V13113+4文献标识码:AR esearch advances of particle im age velocimetry forgas 2liquid tw o 2phase flowX U Lian feng ,CHE N G ang ,LI Jianzhong ,J I N Shanghai(Institu te o f hydraulics , Xi ’an Univer sity , Abstract :As a new method for non2intrusive velocity measurement ,particle image velocimetry (PI V is widely used in as well as in gas flow , but the tw o 2phase PI V measurement technique is in In recent years ,many researchers have made great efforts in this field and gets ,superiority ,difficulty of PI V used in tw o 2phase flow measurement and the recent of separation methods a key technique in tw o 2phase PI V measurement are presented in this paper. The particle size and concentration measurement methods are als o discussed in this paper.K ey w ords :multiphase fluid mechanics ; tw o 2phase flows ; PI V ; phase separation ; size analysis ; concentration measurement收稿日期:2004203223基金项目:国家自然科学基金项目(50079020 ; 陕西省教育厅科研计划项目(00JK 190作者简介:许联锋,1971年出生, 男, 讲师, 博士1引言气液两相流作为两相流中的一种, 广泛应用于水利、动力、化工、核能、石油、冶金等领域。

二维采样与重建的方法
二维采样与重建的方法主要包括以下两种:
1. 探测物体的投影数据,然后使用这些数据来重建物体的实际内部构造。
这种方法基于图像重建的一般思想,即通过解方程组来找出矩阵中的元素。
例如,可以设那些矩阵元素为未知数,然后列出一个线性方程组,解这个方程组便可以得到答案。
2. 使用二维函数 f(x, y) 的傅里叶变换F(ωx, ωy) 沿与探测器平行的方向过
原点的片段,来重建物体的实际内部构造。
这种方法通常被称为处理FBP (Filtered Backprojection,先滤波后反投影)算法。
以上方法仅供参考,建议查阅关于二维采样与重建的资料或者咨询相关专家,获取更准确的信息。

粒子图像测速(PIV)技术在烟丝流量检测中的研究曾蕾;赵立宏【摘要】粒子图像测速技术(pIV)是一种全新的非接触式的,瞬时的,全场流速测量方法,广泛应用于流体力学中.本研究将PIV技术引入烟丝运动研究是一个尝试,旨在为烟丝流量的检测提供一个新的测量手段.通过分析烟丝在风送管道内的运动,利用PIV技术并结合PTV技术,采用图像处理得到烟丝的运动速度.粒子图像测速技术具有一定的优势,可以克服传统测量手段的不足.【期刊名称】《机械研究与应用》【年(卷),期】2011(000)005【总页数】3页(P138-140)【关键词】流场测速:PIV;图像处理;PTV【作者】曾蕾;赵立宏【作者单位】南华大学机械工程学院,湖南街阳421001;南华大学机械工程学院,湖南街阳421001【正文语种】中文【中图分类】TH121 引言随着烟草工业企业集团化的建立和烟草品牌的整合,企业之间的竞争由品牌的单一竞争走向品牌与成本并举的竞争。
主要集中体现在提高卷烟制造水平,提升卷烟制造能力。
目前卷烟厂所使用的卷烟机大多采用管道烟丝进料,这种进料方式的卷烟机通过管道从烟丝喂丝机吸进烟丝送到卷烟机卷制烟支,输送烟丝的过程是全封闭的,难以用普通电子秤进行接触式计量。
并且现有技术只能测量烟丝风送过程中管道中空气流动的速度,不能直接测量烟丝运动速度,更不能计量烟丝的流量。
因此,卷烟厂只采用电子秤或核子秤配合皮带输送系统对多台卷烟机上的总烟丝消耗进行计量,不能对单台卷烟机进行烟丝消耗的计量和控制,这样每个班次,每台卷烟机的烟丝消耗量和损耗均难以做到准确的测量和控制。
对比现在出现的风送烟丝微波计量控制仪的优缺点,引入PIV技术加以改进。
PIV[1]是近20年发展起来的非接触式的流场测量技术,通过对流场图像的互相关分析获取流场运动信息,结合了单点测量技术和显示测量技术的优点,克服了其弱点,具备了单点测量技术的精度和分辨率,能够进行平面二维流场的测试,获得平面流场显示的整体结构和瞬态图像[2],是一种很有发展前景的无扰动流场测试技术,是流场显示技术的新发展。

二维运动模糊图像的处理在图像处理中,二维运动模糊是指由于对象在图像的捕捉过程中出现运动,导致图像模糊的现象。
这种模糊可能发生在由长时间曝光、相机移动或拍摄的对象本身运动等情况下。
对于这种二维运动模糊的图像,我们可以使用一些图像处理技术来进行处理,以恢复图像的清晰度和细节。
我们需要识别出图像中的运动模糊区域。
这可以通过分析图像的运动信息或识别图像中的运动物体来完成。
运动模糊的方向和长度是我们处理中需要重点关注的两个参数。
一种常用的运动模糊处理方法是使用Wiener滤波器。
Wiener滤波器是一种可以降低模糊图像中噪声的滤波器。
通过对图像进行频谱分析,可以对模糊图像进行去模糊处理。
Wiener滤波器需要根据图像的模糊程度和噪声程度进行参数设置,因此需要对图像进行一定的预处理。
另一种常用的方法是基于盲解卷积(blind deconvolution)的图像恢复技术。
这种方法的原理是将模糊图像恢复为原始图像和模糊核的卷积结果。
盲解卷积需要利用一些图像处理算法来估计模糊核的大小和方向。
还有一些其他的图像处理方法可以用于处理二维运动模糊图像。
通过多帧图像的叠加处理可以提高图像的清晰度。
这种方法可以通过将多张图像进行权重叠加来增强图像的细节。
还可以使用图像增强算法来增强图像的对比度和细节。
二维运动模糊图像的处理是一个复杂的问题,需要运用多种图像处理技术来恢复图像的清晰度和细节。
为了得到更好的处理效果,我们还需要对图像的模糊程度、噪声程度和运动模式等参数进行准确的估计。
希望本文所述的方法能够对二维运动模糊图像的处理提供一些参考和帮助。

二维fft测速用法二维快速傅里叶变换(Two-dimensional Fast Fourier Transform,2D FFT)是一种常用的信号处理方法,可用于将二维离散信号从时域转换到频域。
在计算机视觉、图像处理以及通信领域中,2D FFT被广泛应用于图像去噪、图像滤波、频域分析等任务。
在本文中,我们将介绍如何使用二维FFT进行图像处理,并讲解如何使用Python中的NumPy库来实现。
首先,我们需要导入必要的库。
在Python中,NumPy是一种常用的科学计算库,可以提供高效的多维数组操作。
另外,我们还需要使用Matplotlib库来显示图像。
可以使用以下命令来安装这两个库:```pip install numpypip install matplotlib```导入库的代码如下所示:```pythonimport numpy as npimport matplotlib.pyplot as plt```假设我们有一个512x512的灰度图像,我们首先需要加载图像并将其转换为灰度数组。
可以使用以下代码来完成:```pythonimage = plt.imread("image.png") # 加载图像gray_image = np.mean(image, axis=2) # 将图像转换为灰度数组,取RGB三个通道的均值```接下来,我们将对图像执行2D FFT。
在NumPy中,可以使用fft.fft2(函数来进行二维FFT。
代码如下所示:```pythonfft_image = np.fft.fft2(gray_image)```这将得到一个复数数组,其中每个元素代表了对应频率分量的幅度和相位信息。
如果要可视化频率分量,可以通过计算幅度谱和相位谱来实现。
可以使用以下代码来计算幅度谱和相位谱,并调用Matplotlib的imshow(函数显示图像:```pythonamplitude = np.abs(fft_image)phase = np.angle(fft_image)plt.subplot(1, 2, 1)plt.imshow(amplitude, cmap="gray")plt.title("Amplitude Spectrum")plt.subplot(1, 2, 2)plt.imshow(phase, cmap="gray")plt.title("Phase Spectrum")plt.show```现在,我们已经完成了对图像的2DFFT操作,并可视化了幅度谱和相位谱。
