《模式识别(第三版)》勘误表
- 格式:doc
- 大小:498.00 KB
- 文档页数:4
第一章 绪论1.什么是模式?具体事物所具有的信息。
模式所指的不是事物本身,而是我们从事物中获得的___信息__。
2.模式识别的定义?让计算机来判断事物。
3.模式识别系统主要由哪些部分组成?数据获取—预处理—特征提取与选择—分类器设计/ 分类决策。
第二章 贝叶斯决策理论1.最小错误率贝叶斯决策过程? 答:已知先验概率,类条件概率。
利用贝叶斯公式得到后验概率。
根据后验概率大小进行决策分析。
2.最小错误率贝叶斯分类器设计过程?答:根据训练数据求出先验概率类条件概率分布 利用贝叶斯公式得到后验概率如果输入待测样本X ,计算X 的后验概率根据后验概率大小进行分类决策分析。
3.最小错误率贝叶斯决策规则有哪几种常用的表示形式? 答:4.贝叶斯决策为什么称为最小错误率贝叶斯决策?答:最小错误率Bayes 决策使得每个观测值下的条件错误率最小因而保证了(平均)错误率 最小。
Bayes 决策是最优决策:即,能使决策错误率最小。
5.贝叶斯决策是由先验概率和(类条件概率)概率,推导(后验概率)概率,然后利用这个概率进行决策。
6.利用乘法法则和全概率公式证明贝叶斯公式答:∑====mj Aj p Aj B p B p A p A B p B p B A p AB p 1)()|()()()|()()|()(所以推出贝叶斯公式7.朴素贝叶斯方法的条件独立假设是(P(x| ωi) =P(x1, x2, …, xn | ωi)⎩⎨⎧∈>=<211221_,)(/)(_)|()|()(w w x w p w p w x p w x p x l 则如果∑==21)()|()()|()|(j j j i i i w P w x P w P w x P x w P 2,1),(=i w P i 2,1),|(=i w x p i ∑==21)()|()()|()|(j j j i i i w P w x P w P w x P x w P ∑===Mj j j i i i i i A P A B P A P A B P B P A P A B P B A P 1)()|()()|()()()|()|(= P(x1| ωi) P(x2| ωi)… P(xn| ωi))8.怎样利用朴素贝叶斯方法获得各个属性的类条件概率分布?答:假设各属性独立,P(x| ωi) =P(x1, x2, …, xn | ωi) = P(x1| ωi) P(x2| ωi)… P(xn| ωi) 后验概率:P(ωi|x) = P(ωi) P(x1| ωi) P(x2| ωi)… P(xn| ωi)类别清晰的直接分类算,如果是数据连续的,假设属性服从正态分布,算出每个类的均值方差,最后得到类条件概率分布。

勘误表一、P10页中 4.MS-DOS命令内容的复制、粘贴(1)用鼠标指向图1.1.12所示改为用鼠标指向图1.1.14所示……二、P11页实验32.键盘及输入法的设置(3)改为:将“中文(简体)-智能ABC”的键设置中的“切换至中文(简体)-智能ABC”按键顺序更改为ctrl+shift+1,并设置成“光标跟随”和“词频调整”。
三、实验4 word进阶提高——样式的应用改为:一、实验目的(1)学会word样式的修改及新样式的创建。
(2)学会合并邮件。
(3)学会自动生成目录。
(4)掌握项目符号的使用和脚注的使用。
二、实验内容时间:预计20min打开文档“A4_1.DOC”,按以下要求进行操作。
1.应用样式(1)将文档中第一行样式设置为“文章标题”,第二行样式设置为“标题注释”。
(2)将文章正文的第一段套用KSDOT3.DOT模板中的“正文段落4”样式。
2.修改样式(1)以正文为基准样式,将“正文段落01”样式修改为:字体为新宋体,字号为小三,字形为加粗,字体颜色为深蓝色,行间距为固定值20磅,自动更新对当前样式的改动,并应用于正文第二段。
(2)以正文为基准样式,将“正文段落02”样式修改为:字体为隶书,字号为四号、字行为加粗倾斜、字体颜色为蓝色,行间距为固定值21磅,段前、段后0.5行,自动更新对当前样式的改动,并应用于正文第三段。
3.新建样式(1)以正文为基准样式,新建“重点段落01”样式:字体为方正舒体,字号为小三,字形为加粗,行间距为固定值14磅,段前、段后0.5行,并应用于正文第四段。
(2)以正文为基准样式,新建“重点段落02”样式:字体为方正姚体,字号为小三,字形为加粗,行间距为固定值20磅,段前、段后0.5行,并应用于正文第五段。
4.创建模板保存文档,并将当前文档命名为A4_1A.DOT.三、技能进阶1题内容保持不变,另新增1题,内容如下:时间预计10min2.打开A4_3.DOC,按以下要求进行操作。
1、PCA和LDA的区别?PCA是一种无监督的映射方法,LDA是一种有监督的映射方法。
PCA只是将整组数据映射到最方便表示这组数据的坐标轴上,映射时没有利用任何数据内部的分类信息。
因此,虽然做了PCA后,整组数据在表示上更加方便(降低了维数并将信息损失降到了最低),但在分类上也许会变得更加困难;LDA在增加了分类信息之后,将输入映射到了另外一个坐标轴上,有了这样一个映射,数据之间就变得更易区分了(在低纬上就可以区分,减少了很大的运算量),它的目标是使得类别内的点距离越近越好,类别间的点越远越好。
2、最大似然估计和贝叶斯方法的区别?p(x|X)是概率密度函数,X是给定的训练样本的集合,在哪种情况下,贝叶斯估计接近最大似然估计?最大似然估计把待估的参数看做是确定性的量,只是其取值未知。
利用已知的样本结果,反推最有可能(最大概率)导致这样结果的参数值(模型已知,参数未知)。
贝叶斯估计则是把待估计的参数看成是符合某种先验概率分布的随机变量。
对样本进行观测的过程,把先验概率密度转化为后验概率密度,利用样本的信息修正了对参数的初始估计值。
当训练样本数量趋于无穷的时候,贝叶斯方法将接近最大似然估计。
如果有非常多的训练样本,使得p(x|X)形成一个非常显著的尖峰,而先验概率p(x)又是均匀分布,此时两者的本质是相同的。
3、为什么模拟退火能够逃脱局部极小值?在解空间内随机搜索,遇到较优解就接受,遇到较差解就按一定的概率决定是否接受,这个概率随时间的变化而降低。
实际上模拟退火算法也是贪心算法,只不过它在这个基础上增加了随机因素。
这个随机因素就是:以一定的概率来接受一个比单前解要差的解。
通过这个随机因素使得算法有可能跳出这个局部最优解。
4、最小错误率和最小贝叶斯风险之间的关系?基于最小风险的贝叶斯决策就是基于最小错误率的贝叶斯决策,换言之,可以把基于最小错误率决策看做是基于最小风险决策的一个特例,基于最小风险决策本质上就是对基于最小错误率公式的加权处理。
1 .设有下列语句,请用相应的谓词公式把它们表示出来:(1)有的人喜欢梅花,有的人喜欢菊花,有的人既喜欢梅花又喜欢菊花。
答:定义谓词: MAN(X):X是人, LIKE(X,Y):X喜欢Y ((X)(MAN(X)∧LIKE(X, 梅花))∧((Y)(MAN(Y)∧LIKE(Y,菊花))∧((Z)(MAN(Z)∧(LIKE(Z,梅花)∧LIKE(Z,菊花))(2)他每天下午都去打篮球。
答:定义谓词:TIME(X):X是下午PLAY(X,Y):X去打Y(X)TIME(X) PLAY(他,篮球)(3)并不是每一个人都喜欢吃臭豆腐。
定义谓词:MAN(X):X是人LIKE(X,Y):X喜欢吃Y┐((X)MAN(X) LIKE(X,CHOUDOUFU))2 .请对下列命题分别写出它的语义网络:(1)钱老师从 6 月至 8 月给会计班讲《市场经济学》课程。
(2)张三是大发电脑公司的经理,他 35 岁,住在飞天胡同 68 号。
(3)甲队与乙队进行蓝球比赛,最后以 89 : 102 的比分结束。
3. 框架表示法一般来讲,教师的工作态度是认真的,但行为举止有些随便,自动化系教师一般来讲性格内向,喜欢操作计算机。
方园是自动化系教师,他性格内向,但工作不刻苦。
试用框架写出上述知识,并求出方圆的兴趣和举止?答:框架名:<教师>继承:<职业>态度:认真举止:随便框架名:<自动化系教师>继承:<教师>性格:内向兴趣:操作计算机框架名:<方园> 继承:<自动化系教师>性格:内向态度:不刻苦兴趣:操作计算机举止:随便4. 剧本表示法作为一个电影观众,请你编写一个去电影院看电影的剧本。
答:(1) 开场条件(a) 顾客想看电影(b) 顾客在足够的钱(2) 角色顾客,售票员,检票员,放映员(3) 道具钱,电影票(4) 场景场景1 购票1. 顾客来到售票处2. 售票员把票给顾客3. 顾客把钱给售票员4. 顾客走向电影院门场景2 检票1. 顾客把电影票给检票员2. 检票员检票3. 检票员把电影票还给顾客4. 顾客进入电影院场景3 等待1. 顾客找到自己的座位2. 顾客坐在自己座位一等待电影开始场景4 观看电影1. 放映员播放电影2. 顾客观看电影场景5 离开(a) 放映员结束电影放映(b) 顾客离开电影院(5) 结果(a) 顾客观看了电影(b) 顾客花了钱5. 状态空间表示法三个传教士和三个野人来到河边,有一条船可供一人或两人乘渡,在渡河过程中,任一岸的野人数若大于传教士人数,野人就会吃掉传教士。


![Digital Image Processing - 3rd Edition [Gonzalez] 数字图像处理 冈萨雷斯 第三版 勘误表](https://uimg.taocdn.com/8159fcca9ec3d5bbfd0a746d.webp)
Corrections and Clarifications Digital Image Processing3rd EditionGonzalez and WoodsPrentice Hall© 2008December 5, 2013CORRECTIONS05 December, 2013The bottom, leftmost pixel in the Marker Image, F, should be white.The caption in Fig. 9.32(a) should read: Reconstruction-by-dilation of marker image.05 December, 201305 December, 2013CLARIFICATIONSPageClarifications59, last sentence, 2ndparagraph. It is assumed also that the physical dimensions of the chips are the same.117, 2nd paragraph of Ex 3.3.Figure 3.12(c) was generated with a transformation function of the form shown in Fig. 3.11(b), but with the value of the constant part of the curve set to 0 instead of the high value shown in Fig. 3.11(b) .661, Fig. 9.31(c). Although the image appears as a uniform black rectangle (all 0s), there are 1-valued points along its boundary that are difficult to see at the image scale shown and also because the background (page) iswhite (i.e., 1-valued). See the 3rd sentence in the first paragraph of page 661.694, Fig. 10.2(a). The image in Fig. 10.2(a) should have the dot shown.In some printings of the book the dot is barely visible, while in others it shows perfectly, as in the image shown on the right. Also, small, random printing imperfections that sometimes show in white or gray can be confusing, and should beignored. [Note: If you'reusing a low resolution monitor you may need to magnify this document in order to see the dot.]697, Fig. 10.4(d) The image in Fig. 10.4(d) should have the single dotshown. The image is black (0) elsewhere. In some printings of the book the dot is barely visible, while in others it shows perfectly, as in the image shown on the right. Also, small, random printing imperfections that sometimes show in white or gray can be confusing, and should be ignored. The correct image consists of a single white dot on a uniform black background.872, Fig. 12.9(d). The image in Fig. 10.9(d) should have the single whitedot shown. The image is black (0) elsewhere. In some printings of the book the dot is barely visible, while in others it shows perfectly, as in the image shown on the right. Also, small random printing imperfections that sometimes show in white or gray can be confusing, and should be ignored. The correct imageconsists of a single white dot on a uniform black background.05 December, 2013Pg 655, Fig, 9.25 Edit figure to look like the one on the right.773, Fig. 10.55.Note that the pixel identified by the arrow in the top left of the figure is missing in the figure in the book.。
题1:在一个10类的模式识别问题中,有3类单独满足多类情况1,其余的类别满足多类情况2。
问该模式识别问题所需判别函数的最少数目是多少?答:将10类问题可看作4类满足多类情况1的问题,可将3类单独满足多类情况1的类找出来,剩下的7类全部划到4类中剩下的一个子类中。
再在此子类中,运用多类情况2的判别法则进行分类,此时需要7*(7-1)/2=21个判别函数。
故共需要4+21=25个判别函数。
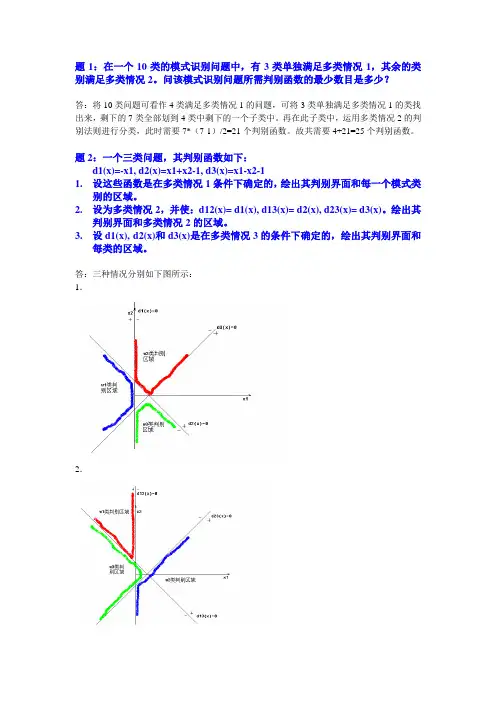
题2:一个三类问题,其判别函数如下:d1(x)=-x1, d2(x)=x1+x2-1, d3(x)=x1-x2-11.设这些函数是在多类情况1条件下确定的,绘出其判别界面和每一个模式类别的区域。
2.设为多类情况2,并使:d12(x)= d1(x), d13(x)= d2(x), d23(x)= d3(x)。
绘出其判别界面和多类情况2的区域。
3.设d1(x), d2(x)和d3(x)是在多类情况3的条件下确定的,绘出其判别界面和每类的区域。
答:三种情况分别如下图所示:1.2.3.题3:两类模式,每类包括5个3维不同的模式,且良好分布。
如果它们是线性可分的,问权向量至少需要几个系数分量?假如要建立二次的多项式判别函数,又至少需要几个系数分量?(设模式的良好分布不因模式变化而改变。
)答:(1)若是线性可分的,则权向量至少需要14N n =+=个系数分量; (2)若要建立二次的多项式判别函数,则至少需要5!102!3!N ==个系数分量。
题4:用感知器算法求下列模式分类的解向量w : ω1: {(0 0 0)T, (1 0 0)T, (1 0 1)T, (1 1 0)T} ω2: {(0 0 1)T, (0 1 1)T, (0 1 0)T, (1 1 1)T}解:将属于2w 的训练样本乘以(1)-,并写成增广向量的形式x1=[0 0 0 1]',x2=[1 0 0 1]',x3=[1 0 1 1]',x4=[1 1 0 1]';x5=[0 0 -1 -1]',x6=[0 -1 -1 -1]',x7=[0 -1 0 -1]',x8=[-1 -1 -1 -1]';迭代选取1C =,(1)(0,0,0,0)w '=,则迭代过程中权向量w 变化如下:(2)(0 0 0 1)w '=;(3)(0 0 -1 0)w '=;(4)(0 -1 -1 -1)w '=;(5)(0 -1 -1 0)w '=;(6)(1 -1 -1 1)w '=;(7)(1 -1 -2 0)w '=;(8)(1 -1 -2 1)w '=;(9)(2 -1 -1 2)w '=; (10)(2 -1 -2 1)w '=;(11)(2 -2 -2 0)w '=;(12)(2 -2 -2 1)w '=;收敛所以最终得到解向量(2 -2 -2 1)w '=,相应的判别函数为123()2221d x x x x =--+。
第5章:线性判别函数第一部份:计算与证明1.有四个来自于两个类别的二维空间中的样本,其中第一类的两个样本为(1,4)T和(2,3)T,第二类的两个样本为(4,1)T和(3,2)T。
那个地址,上标T表示向量转置。
假设初始的权向量a=(0,1)T,且梯度更新步长k固定为1。
试利用批处置感知器算法求解线性判别函数g(y)=a T y的权向量。
解:第一对样本进行标准化处置。
将第二类样本更改成(4,1)T和(3,2)T. 然后计算错分样本集:g(y1) = (0,1)(1,4)T = 4 > 0 (正确)g(y2) = (0,1)(2,3)T = 3 > 0 (正确)g(y3) = (0,1)(-4,-1)T = -1 < 0 (错分)g(y4) = (0,1)(-3,-2)T = -2 < 0 (错分)因此错分样本集为Y={(-4,-1)T , (-3,-2)T }.接着,对错分样本集求和:(-4,-1)T+(-3,-2)T = (-7,-3)T第一次修正权向量a,以完成一次梯度下降更新:a=(0,1)T+ (-7,-3)T=(-7,-2)T再次计算错分样本集:g(y1) = (-7,-2)(1,4)T = -15 < 0 (错分)g(y2) = (-7,-2)(2,3)T = -20 < 0 (错分)g(y3) = (-7,-2)(-4,-1)T = 30 > 0 (正确)g(y4) = (-7,-2)(-3,-2)T = 25 > 0 (正确)因此错分样本集为Y={(1,4)T , (2,3)T }.接着,对错分样本集求和:(1,4)T +(2,3)T = (3,7)T第二次修正权向量a ,以完成二次梯度下降更新:a=(-7,-2)T + (3,7)T =(-4,5)T 再次计算错分样本集:g(y 1) = (-4,5)(1,4)T = 16 > 0 (正确) g(y 2) = (-4,5)(2,3)T = 7 > 0 (正确) g(y 3) = (-4,5)(-4,-1)T = 11 > 0 (正确) g(y 4) = (-4,5)(-3,-2)T = 2 > 0 (正确)现在,全数样本均被正确分类,算法终止,所得权向量a=(-4,5)T 。
模式识别与计算机视觉⼿册第三版2019-10-19本书的第⼀、⼆、三版分别于1993、1999和2005年出版。
书中全⾯提供了过去20年中在模式识别与计算机视觉领域中的进展和成就,作者都是这个领域的第⼀流专家,其中的两位Thomas Huang和Jake Aggarwal是权威的K.S.Fu奖⾦获得者,该项奖⾦是由国际模式识别协会(IAPR)授予。
全书共有五个部分。
第⼀部分模式识别的基本⽅法(有5章):第1章统计模式识别;第2章时空模式的隐藏马尔可夫模型;第3章最⼩误差模式识别的⼀个新的基于内核的系统阐述;第4章并⾏上下⽂数组⽂法与轨迹;第5章模式识别与局部不变特性。
第⼆部分计算机视觉的基本⽅法(有6章):第1章图像分析与图像判读的基于实例的推理;第2章多图像⼏何――投影的观点;第3章3维离散⼆值图像中的⾻架化;第4章2维、3维及4维数字距离变换;第5章计算整体形状测度;第6章利⽤局部⼆进制模式的纹理分析。
第三部分识别的应⽤(共9章):第1章⽂档的分析与理解;第2章中⽂字符识别;第3章从银⾏⽀票上⼿写的合理钱数中析取数字;第4章⽤于提⾼⼈类视觉的印刷体OCR评估;第5章使⽤图模型的万维⽹⽂档的群集与分类;第6章乳房X线照⽚中肿块的⾃动检测;第7章⽐例空间中⽤于图像汇合的基于⼩波的卡尔曼滤波;第8章多传感器汇合与超频谱图像数据;第9章功能磁共振图像数据的独⽴组成部分分析。
第四部分⼈体识别(有6章):第l章多状态情绪识别;第2章单眼视频序列的基于花纹循环的⼈体识别;第3章掌纹认证系统;第4章⽤于可视监视的⾼分辨率⾯部图像的重现;第5章利⽤可变形特性图的物体识别:脸、⼿及分组景物;第6章⽤于快速⾯部检测的分层分类与特性简化。
第五部分系统与技术(有7章):第1章利⽤单个或多个照相机跟踪及分类移动物体;第2章图像分割算法的特性评估;第3章⽤于知识发现的基于内容的视频分析;第4章对象处理⽅法学及其对图像处理和模式识别的应⽤;第5章⾳乐风格识别――量化⽅法;第6章⾃动检测器:可移动⾃动化数字平板的识别;第7章全向视觉。
模式识别非学位课考试试题考试科目:模式识别考试时间考生姓名: 考生学号任课教师考试成绩一、简答题(每题6分,12题共72分):1、监督学习和非监督学习有什么区别?参考答案:监督学习与非监督学习的区别:监督学习方法用来对数据实现分类,分类规则通过训练获得。
该训练集由带分类号的数据集组成,因此监督学习方法的训练过程是离线的.非监督学习方法不需要单独的离线训练过程,也没有带分类号(标号)的训练数据集,一般用来对数据集进行分析,如聚类,确定其分布的主分量等.2、你如何理解特征空间?表示样本有哪些常见方法?参考答案:由利用某些特征描述的所有样本组成的集合称为特征空间或者样本空间,特征空间的维数是描述样本的特征数量。
描述样本的常见方法:矢量、矩阵、列表等。
3、什么是分类器?有哪些常见的分类器?参考答案:将特征空中的样本以某种方式区分开来的算法、结构等。
例如:贝叶斯分类器、神经网络等。
4、进行模式识别在选择特征时应该注意哪些问题?参考答案:特征要能反映样本的本质;特征不能太少,也不能太多;要注意量纲。
5、聚类分析中,有哪些常见的表示样本相似性的方法?参考答案:距离测度、相似测度和匹配测度。
距离测度例如欧氏距离、绝对值距离、明氏距离、马氏距离等。
相似测度有角度相似系数、相关系数、指数相似系数等。
6、SVM的主要思想可以概括为两点:(1)它是针对线性可分情况进行分析,对于线性不可分的情况,通过使用非线性映射算法将低维输入空间线性不可分的样本转化为高维特征空间使其线性可分,从而使得高维特征空间采用线性算法对样本的非线性特征进行线性分析成为可能;(2)它基于结构风险最小化理论之上在特征空间中建构最优分割超平面,使得学习器得到全局最优化,并且在整个样本空间的期望风险以某个概率满足一定上界。
7、请论述模式识别系统的主要组成部分及其设计流程,并简述各组成部分中常用方法的主要思想。
特征空间信息获取:通过测量、采样和量化,可以用矩阵或向量表示二维图像或以为波形。
“模式识别(三).PDF”课件课后上机选做作业参考解答(武大计算机学院袁志勇, Email: yuanzywhu@) 上机题目:两类问题,已知四个训练样本ω1={(0,0)T,(0,1)T};ω2={(1,0)T,(1,1)T}使用感知器固定增量法求判别函数。
设w1=(1,1,1)Tρk=1试编写程序上机运行(使用MATLAB、 C/C++、C#、JA V A、DELPHI等语言中任意一种编写均可),写出判别函数,并给出程序运行的相关运行图表。
这里采用MATLAB编写感知器固定增量算法程序。
一、感知器固定增量法的MATLAB函数编写感知器固定增量法的具体内容请参考“模式识别(三).PDF”课件中的算法描述,可将该算法编写一个可以调用的自定义MATLAB函数:% perceptronclassify.m%% Caculate the optimal W by Perceptron%% W1-3x1 vector, initial weight vector% Pk-scalar, learning rate% W -3x1 vector, optimal weight vector% iters - scalar, the number of iterations%% Created: May 17, 2010function [W iters] = perceptronclassify(W1,Pk)x1 = [0 0 1]';x2 = [0 1 1]';x3 = [1 0 1]';x4 = [1 1 1]';% the training sampleWk = W1;FLAG = 0;% iteration flagesiters = 0;if Wk'*x1 <= 0Wk =Wk + x1;FLAG = 1;endif Wk'*x2 <= 0Wk =Wk + x2;FLAG = 1;endif Wk'*x3 >= 0Wk=Wk-x3;FLAG = 1; endif Wk'*x4 >= 0Wk =Wk -x4; FLAG = 1; enditers = iters + 1; while (FLAG) FLAG = 0; if Wk'*x1 <= 0Wk = Wk + x1; FLAG = 1; endif Wk'*x2 <= 0Wk = Wk + x2; FLAG = 1; endif Wk'*x3 >= 0 Wk = Wk - x3; FLAG = 1; endif Wk'*x4 >= 0 Wk = Wk - x4; FLAG = 1; enditers = iters + 1; endW = Wk;二、程序运行程序输入:初始权向量1W , 固定增量大小k ρ 程序输出:权向量最优解W , 程序迭代次数iters 在MATLAB 7.X 命令行窗口中的运行情况: 1、初始化1[111]T W = 初始化W 1窗口界面截图如下:2、初始化1kρ=初始化Pk 窗口界面截图如下:3、在MATLAB 窗口中调用自定义的perceptronclassify 函数由于perceptronclassify.m 下自定义的函数文件,在调用该函数前需要事先[Set path…]设置该函数文件所在的路径,然后才能在命令行窗口中调用。