《机械原理》第一章 平面机构的结构分析
- 格式:ppt
- 大小:1.19 MB
- 文档页数:59
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
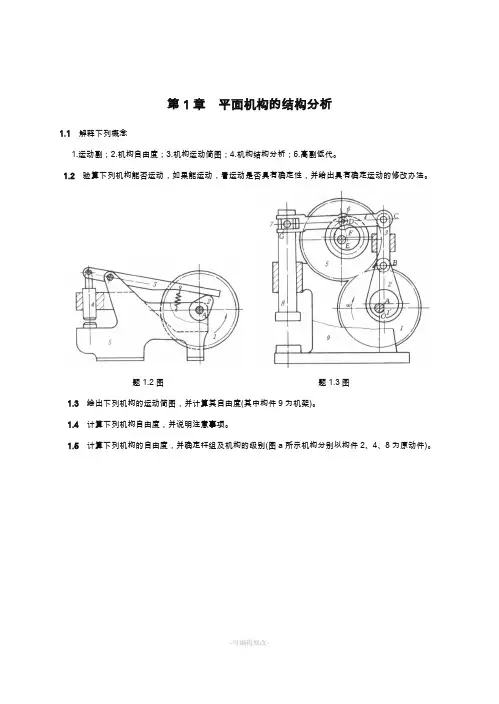
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE =120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。
(完整版)机械原理笔记第⼀章平⾯机构的结构分析1.1 研究机构的⽬的⽬的:1、探讨机构运动的可能性及具有确定运动的条件2、对机构进⾏运动分析和动⼒分析3、正确绘制机构运动简图1.2 运动副、运动链和机构1、运动副:两构件直接接触形成的可动联接(参与接触⽽构成运动副的点、线、⾯称为运动副元素)低副:⾯接触的运动副(转动副、移动副),⾼副:点接触或线接触的运动副注:低副具有两个约束,⾼副具有⼀个约束2、⾃由度:构件具有的独⽴运动的数⽬(或确定构件位置的独⽴参变量的数⽬)3、运动链:两个以上的构件以运动副联接⽽成的系统。
其中闭链:每个构件⾄少包含两个运动副元素,因⽽够成封闭系统;开链:有的构件只包含⼀个运动副元素。
4、机构:若运动链中出现机架的构件。
机构包括原动件、从动件、机架。
1.3 平⾯机构运动简图1、机构运动简图:⽤简单的线条和规定的符号来代表构件和运动副并按⼀定的⽐例表⽰各运动副的相对位置。
机构⽰意图:不按精确⽐例绘制。
2、绘图步骤:判断运动副类型,确定位置;合理选择视图,定⽐例µl;绘图(机架、主动件、从动件)1.4 平⾯机构的⾃由度1、机构的⾃由度:机构中各活动构件相对于机架的所能有的独⽴运动的数⽬。
F=3n - 2p L - p H(n指机构中活动构件的数⽬,p L指机构中低副的数⽬,p H指机构中⾼副的数⽬)⾃由度、原动件数⽬与机构运动特性的关系:1):F≤0时,机构蜕化成刚性桁架,构件间不可能产⽣相对运动2):F > 0时,原动件数等于F时,机构具有确定的运动; 原动件数⼩于机构⾃由度时,机构运动不确定; 原动件数⼤于机构⾃由度,机构遭到破坏。
2、计算⾃由度时注意的情况1)复合铰链:m个构件汇成的复合铰链包含m-1个转动副(必须是转动副,不能多个构件汇交在⼀起就构成复合铰链,注意滑块和盘类构件齿轮容易漏掉,另外机架也是构件。
2) 局部⾃由度:指某些构件(如滚⼦)所产⽣的不影响整个机构运动的局部运动的⾃由度。
第一章平面机构的结构分析本章主要内容:1)平面机构运动简图的绘制2)平面机构自由度的计算及机构具有确定运动的条件3)机构的组成原理及结构分析1-1. 研究机构结构的目的(1) 探讨机构运动的可能性及其具有确定运动的条件(2) 将各种机构按结构加以分类,并按分类建立运动分析和动力分析的一般方法(3) 了解机构的组成原理(4) 绘制机构运动简图1-2. 运动副、运动链和机构一、运动副基本概念:1运动副:两构件直接接触形成的可动联接运动副1 运动副2 运动副2运动副元素:参与接触而构成运动副的点、线、面。
3自由度:构件所具有的独立运动的数目4约束:对独立运动所加的限制运动副的分类:1根据运动副的接触形式,运动副归为两类:1)低副:面接触的运动副。
如转动副、移动副。
2)高副:点或线接触的运动副。
如齿轮副、凸轮副。
2根据两构件的空间运动形式,可将运动副分为平面运动副和空间运动副。
1)平面运动副:组成运动副两构件间作相对平面运动,如转动副、移动副、凸轮副、齿轮副。
2)空间运动副:组成运动副两构件间作相对空间运动。
如螺旋副,球面副运动副的约束特点:具有两个约束而相对自由度等于一的平面运动副:转动副和移动副。
具有一个约束而相对自由度等于二的运动副:高副约束一个相对转动而保留两个相对移动的运动副是不可能存在的。
二、运动链•运动链:两个以上构件以运动副联接而成的系统。
•闭链:组成运动链的每个构件至少包括两个运动副元素,该运动链为封闭系统。
•开链:运动链中有的构件只包含一个运动副元素。
三、机构从运动链的角度,机构需具有下列特点:•1) 运动链中有机架•2) 各构件间有确定的运动1-3.平面机构运动简图一、机构运动简图的定义及作用说明机构各构件间相对运动关系的简单图形.机构运动简图是用规定的运动副符号及代表构件的线条来表示构件和运动副,并按一定比例表示各运动副的相对位置.•组成:线条和符号•符号:表示运动副二、机构运动简图的绘制1.运动副的表示符号:1)两构件构成转动副2)两构件构成移动副3)两构件组成平面高副用两构件接触点(线)附近的两段轮廓表示2.构件的表示方法将该构件上的运动副元素按其位置表示出来,再用简单的线条将这些运动副联接起来,就可表示这个构件。
机械原理之平面机构的结构分析1. 引言平面机构是机械系统中广泛应用的一种结构类型,用于实现转动或传递运动的目的。
它由多个构件组成,通过铰链连接,并具有特定的运动机构。
本文将对平面机构的结构进行分析,包括构件、铰链以及运动机构的特点等。
2. 平面机构的构件平面机构的构件指的是组成机构的各个零件,包括连杆、链条、轴等。
这些构件不仅决定了机构的结构形式,还直接影响着机构的运动性能。
以下是平面机构常见的构件类型:连杆是平面机构中最常见的构件之一,通常由刚性材料制成。
根据连接方式的不同,连杆可以分为刚性连杆和柔性连杆。
刚性连杆由铰链连接,具有一定的长度和刚性,可以实现平面内的转动。
柔性连杆则由柔性材料制成,如弹簧钢,可以在一定程度上变形,用于实现特定的运动要求。
2.2 链条链条是平面机构中连接连杆的重要构件,其作用是通过链节的连接形成平面机构的运动链。
链条通常由多个链节组成,每个链节可以进行相对运动,从而实现机构的运动。
常见的链条类型有平面链条、滚子链条等。
轴是平面机构中支撑和固定构件的一种。
轴的材质可以是金属、合金等刚性材料,具有一定的强度和刚度,用于支撑和固定机构中的其他构件。
轴可以是定轴和动轴,定轴通常起到固定作用,动轴则能够实现旋转运动。
3. 平面机构的铰链连接平面机构中的铰链连接是实现构件之间相对运动的关键。
铰链连接是指通过固定在构件上的铰链来连接构件,使其可以相对旋转。
常见的铰链连接有以下几种形式:3.1 旋转铰链旋转铰链是最基本的铰链连接方式,它通过轴上的固定连接来实现构件的相对旋转。
旋转铰链具有结构简单、工作可靠的特点,广泛应用于机械系统中。
3.2 滑动铰链滑动铰链是一种通过滑动副实现构件间相对运动的铰链连接。
它通常由导向副和滑块副组成,通过滑块在导向副上的滑动来实现构件的相对运动。
3.3 规则铰链规则铰链是一种特殊的铰链连接方式,它通过杆与杆的端部连接来实现构件的相对运动。
规则铰链具有结构简单、工作平稳的特点,在机械系统中广泛应用。
第1章平面机构的结构分析1.1解释下列概念1.运动副;2.机构自由度;3.机构运动简图;4.机构结构分析;5.高副低代。
1.2验算下列机构能否运动,如果能运动,看运动是否具有确定性,并给出具有确定运动的修改办法。
题1.2图题1.3图1.3 绘出下列机构的运动简图,并计算其自由度(其中构件9为机架)。
1.4 计算下列机构自由度,并说明注意事项。
1.5计算下列机构的自由度,并确定杆组及机构的级别(图a所示机构分别以构件2、4、8为原动件)。
题1.4图题1.5图第2章平面机构的运动分析2.1试求图示各机构在图示位置时全部瞬心。
题2.1图2.2在图示机构中,已知各构件尺寸为l AB=180mm , l BC=280mm , l BD=450mm ,l CD=250mm ,l AE=120mm ,φ=30º, 构件AB上点E的速度为v E=150 mm /s ,试求该位置时C、D两点的速度及连杆2的角速度ω2。
2.3 在图示的摆动导杆机构中,已知l AB=30mm , l AC=100mm , l BD=50mm ,l DE=40mm ,φ1=45º,曲柄1以等角速度ω1=10 rad/s沿逆时针方向回转。
求D点和E点的速度和加速度及构件3的角速度和角加速度(用相对运动图解法)。
题2.2图题2.3图2.4 在图示机构中,已知l AB =50mm , l BC =200mm , x D =120mm , 原动件的位置φ1=30º, 角速度ω1=10 rad/s ,角加速度α1=0,试求机构在该位置时构件5的速度和加速度,以及构件2的角速度和角加速度。
题2.4图2.5 图示为机构的运动简图及相应的速度图和加速度图。
(1)在图示的速度、加速度多边形中注明各矢量所表示的相应的速度、加速度矢量。
(2)以给出的速度和加速度矢量为已知条件,用相对运动矢量法写出求构件上D 点的速度和加速度矢量方程。