自动控制原理之根轨迹
- 格式:pdf
- 大小:728.35 KB
- 文档页数:63
第四章根轨迹法4-1 根轨迹法的基本概念4-2 常规根轨迹的绘制法则4-3 广义根轨迹4-1 根轨迹法的基本概念一、根轨迹的概念根轨迹:系统中某个参数从零到无穷变化时,系统闭环特征根在s平面上移动的轨迹。
根指的是闭环特征根(闭环极点)。
根轨迹法是根据开环传递函数与闭环传递函数的关系,通过开环传递函数直接分析闭环特征根及系统性能的图解法。
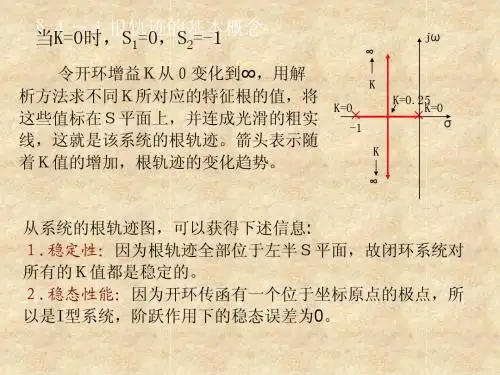
K =0 s 1=0 s 2=-40 < K <1s 1 s 2为不等的负实根K =1s 1=-2 s 2=-21 < K < ∞s 1s2 实部均为-2由根轨迹可知:1)当K =0时,s 1=0,s 2=-1,这两点恰是开环传递函数的极点,同时也是闭环特征方程的极点.2)当0<K < 1 时,s 1,2都是负实根,随着k 的增长,s 1从s 平面的原点向左移,s 2从-1点向右移。
3) 当K = 1时, s 1,2= -2,两根重合在一起,此时系统恰好处在临界阻尼状态。
4) 1 <K <∞,s 1,2为共轭复根,它们的实部恒等于-2,虚部随着K 的增大而增大,系统此时为欠阻尼状态。
★在s平面上,用箭头标明K增大时,闭环特征根移动的方向,以数值表明某极点处的增益大小。
有了根轨迹图就可以分析系统的各种性能:(1)稳定性:根轨迹均在s的左半平面,则系统对所有K>0都是稳定的。
(2)稳态性能:如图有一个开环极点(也是闭环极点)s=0。
说明属于I型系统,阶跃作用下的稳态误差为0。
在速度信号V0t作用下,稳态误差为V0/K,在加速度信号作用下,稳态误差为∞。
(3)动态性能:过阻尼临界阻尼欠阻尼K越大,阻尼比ξ越小,超调量σ%越大。
由此可知:1、利用根轨迹可以直观的分析K的变化对系统性能的影响。
2、根据性能指标的要求可以很快确定出系统闭环特征根的位置;从而确定出可变参数的大小,便于对系统进行设计。
由以上分析知:根轨迹与系统性能之间有着密切的联系,但是,高阶方程很难求解,用直接解闭环特征根的办法来绘制根轨迹是很麻烦的。

自动控制原理根轨迹自动控制系统的根轨迹是描述系统稳定性和性能的重要工具之一。
根轨迹是以闭环传递函数的极点和零点的运动轨迹形状为基础绘制而成的。
在绘制根轨迹时,假设系统的闭环传递函数为G(s),其极点和零点分别为p1, p2, ..., pn和z1, z2, ..., zm。
根轨迹将从零点或者无穷远点开始,经过一系列的线段和曲线,最终到达极点或无穷远点。
根轨迹的演变与系统的开环传递函数有关,而开环传递函数可以表示为G(s) = K(s + z1)(s + z2)...(s + zm)/(s + p1)(s + p2)...(s + pn),其中K是系统的增益。
根轨迹的绘制规则如下:1. 根轨迹总是从系统的零点(实部为负的零点或倾角为奇数倍的复的零点)或者无穷远点开始。
2. 根轨迹图的总数等于系统的开环极点数和零点数之差。
3. 根轨迹的虚轴交点总数等于零点数和极点数之差的绝对值。
4. 根轨迹总是对称于实轴。
5. 根轨迹总是在实轴的左半平面。
通过绘制根轨迹,可以分析系统的稳定性和性能。
当根轨迹与虚轴相交时,系统就有可能发生震荡或振荡。
当根轨迹与实轴相交时,可以得到系统的过渡过程、稳态误差以及系统的稳定性等信息。
绘制根轨迹可以通过手绘或者使用计算机辅助工具进行。
一般来说,使用计算机辅助工具可以更加方便和准确地绘制根轨迹,并且可以对参数和增益进行调整来观察系统的性能变化。
常用的计算机辅助工具有MATLAB、Simulink等。
总之,根轨迹是描述自动控制系统稳定性和性能的重要工具,可以通过绘制闭环传递函数的极点和零点的运动轨迹来得到。
绘制根轨迹可以用于分析系统的震荡性质、过渡过程、稳定性和稳态误差等,并可以通过调整参数和增益来改善系统的性能。
第四章 根轨迹法反馈系统的稳定性由系统的闭环极点确定。
研究系统参数变化对闭环系统特性的影响,是分析系统和设计控制器的重要内容。
参数变化的作用,体现在对闭环极点的影响上。
对于高阶系统,用解析方法说明这种影响,很困难,且不易理解。
图解法是一种方便的近似方法。
l 、基本内容和要点 (l )根轨迹的基本概念根轨迹的定义。
以二阶系统为例说明什么是根轨迹,怎样从根轨迹分析闭环零、极点与系统的性能。
(2)绘制根轨迹的基本规则根轨迹的特点和性质。
绘制以系统开环增益K 为变量的根轨迹的规则与方法。
常见的几种典型系统的根轨迹图。
(3)参数根轨迹参数根轨迹的定义。
多参变量根轨迹。
多环系统的根轨迹。
(4)非最小相位系统的根轨迹最小相位和非最小相位系统的定义和特点。
非最小相位系统根轨迹的特点和绘制规则。
(5)含有延迟环节的系统的根轨迹有延迟环节的系统的极轨迹特点及绘制规则。
延迟环节的近似表达式及使用条件。
(6)基于根轨迹分析系统的响应根轨迹的形状,零极点的位置与系统时域响应性能指标间的关系。
几种常见的典型系统的零、极点分布与其暂态响应性能指标。
2、重点(l )最小相位系统的以开环增益K 为变量的根轨迹的特点及其绘制的规则和方法。
(2)系统根轨迹的形状,零、极点的分布与其时域响应性能指标的关系。
3、难点对“根轨迹上所有的点只是可能的闭环极点”的理解以及非最小相位系统中含最高次冥项系数为负的因子时根轨迹的绘制。
4-1 根轨迹法的基本概念1. 根轨迹概念根轨迹法:根据参数变化∞→0,研究系统闭环极点变化轨迹的一种图解方法。
即在参数变化时图解特征方程。
近似作图;重要区域,如与虚轴的交点与实轴的交点等,根轨迹要准确;依据根轨迹图,可以确定合适的系统参数,为设计控制器提供依据。
例图4-1,研究系统的开环增益K 的变化∞→0, 对闭环极点的影响。
开环传递函数)15.0()(+=s s Ks G ,闭环传递函数Ks s K s 222)(2++=Φ,特征方程0222=++K s s ,根轨迹方程1)2(-=+s s k ,∞→=0,2K k 。