基于机器人的柔性电子检具测量系统
- 格式:pdf
- 大小:212.26 KB
- 文档页数:2
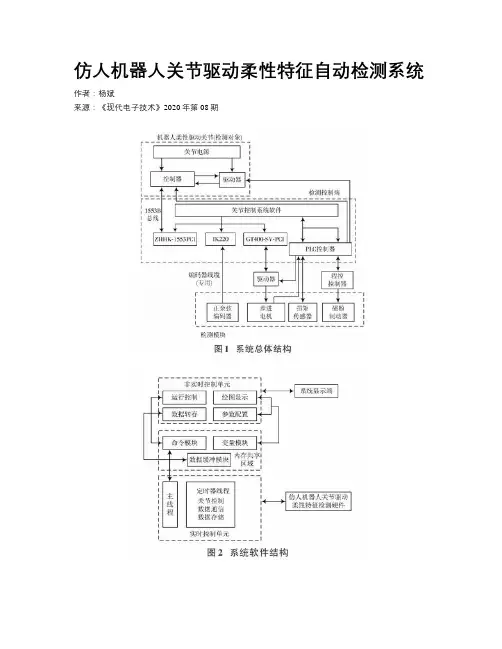
仿人机器人关节驱动柔性特征自动检测系统作者:杨斌来源:《现代电子技术》2020年第08期摘; 要:以快速检测大量仿人机器人关节驱动柔性特征为目标,设计仿人机器人关节驱动柔性特征自动检测系统。
系统检测关节特征为关节扭矩,检测模块的轮辐式扭矩传感器与扭矩转速测量仪配合使用,测量关节扭矩大小。
PLC控制器从步进电机与扭矩传感器中获取检测信息,向关节驱动器与控制器传输检测命令,实现关节扭矩自动检测。
实时控制单元与非实时控制单元构成系统软件,二者以内存共享区域为中介分享检测数据,为检测模块提供软件支持。
测试结果显示,系统检测仿人机器人关节扭矩误差低于0.2 N·m,符合仿人机器人关节特征检测标准。
关键词:仿人机器人; 关节驱动; 系统设计; 关节特征监测; 关节扭矩; 系统测试中图分类号: TN957.52+3⁃34; TP242; ; ; ; ; ; ;文献标识码: A; ; ; ; ; ; ; ; ; ; ;文章编号:1004⁃373X(2020)08⁃0176⁃03Automatic detection system for joint⁃driving flexible feature of humanoid robotYANG Bin(Department of Industrial Automation, Guang Dong Polytechnic College, Zhaoqing 526100, China)Abstract: The automatic detection system for joint⁃driving flexible features of humanoid robot is designed with taken rapid detection of a large number of joint⁃driving flexible features of humanoid robot as target. The joint feature detected by the system is the joint torque, and thehub⁃and⁃spoke torque sensor of the system detection module is used together with the torque rotational speed measurer to measure the size of the joint torque. The PLC controller obtains detection information from stepping motor and torque sensor, and transmits detection command to joint driver and controller, so as to realize the automatic detection of joint torque. The real⁃time control unit and the non⁃real⁃time control unit constitute the system software, and both which share the detection data with the memory shared area as the intermediary to provide software support for the detection module. The testing results s how that the torque error of humanoid robot′s joint detected bythe system is less than 0.2 N·m, which conforms to the detection standard of joint feature of humanoid robot.Keywords: humanoid robot; joint drive; system design; joint feature detection; joint torque; system test0; 引; 言機器人发展水平是国家科技发展的体现与象征,是智能化领域的延伸。
浅谈机器人柔性在线自动测量方法及应用在科学技术迅速发展的时代,在线自动化测量在工业制造中占有很大的地位,是工业生产制造中不可或缺的部分,同时在线自动化测量也是现今精密测量技术研究领域中的一个主要方向。
对于现今的制造业来说,越来越重视对制造业过程的控制,必须要采用先进的在线测量技术,来对制造过程进行全面、严格的监控,最终可以使工业制造过程更加稳定更加可控制与预测。
另外,先进的在线测量方式可以决定制造水平的高低。
1 我国在线自动检测方式研究的现状我国的科研组织根据国家制造业的发展情况制定了重点的产业规划,并且研究开发了新型的在线测量方法,前期实验研发了很多在线测量方法,并且取得了很大的成果,解决了常规的工业生产中的在线测量问题。
但是随着科技的进步,工业生产的发展,逐渐形成了多水准、高效率的流水线生产模式,并且产品制造的应变能力,也必须要提高,要做到可以节约成本的同时提高生产效率,所以这样就对在线的自动测量有了新的要求,在线自动测量模式必须要加强其柔度,工艺的匹配性以及自动化程度,只有这样,才能满足工业生产的需求。
科研人员针对这一种情况,将工业机器人的性能引入到了在线测量的方法当中,工业机器人具有相当大的稳定性,并且可操作性也很强,对于测量定位的精确程度也很精准,从而可以在很大程度上提高测量的准确性以及测量的效率,将工业机器人的性能与视觉测量、精密测试的理论进行相互结合,使得形成了一种全新的柔性在线测量新方法,并且研制了柔性在线视觉监测站,从而来适应现今的混流共线流水线的生产流程,解决现今汽车生产中的柔性在线测量问题。
2 我国现阶段的在线测量方式2.1 采用固定式测量方式针对产品的每一个变化,比如外形、尺寸等,都设计出一套视觉传感器,同时要根据不同的产品设计出不同的传感器,以适应产品测量的需要,针对产品内部测量,需设计出长距离的视觉传感器。
对于这种方法,由于传感器批量设计会增加大量的投资成本,并且对于系统的可靠性来说,也大大的降低了。

柔性电子的高精度测量方法及技术案例柔性电子是指可以在柔性基板上制备的电子设备,其具有轻薄、柔软和可弯曲的特性。
随着柔性电子技术的发展,越来越多的应用领域需要高精度的测量方法和技术来确保柔性电子设备的准确性和可靠性。
本文将介绍柔性电子的高精度测量方法及相关的技术案例。
为了实现柔性电子的高精度测量,首先需要考虑测量对象的特性和限制。
由于柔性电子设备的柔软和可弯曲性,常规的刚性电子设备测量方法并不适用。
因此,需要使用一些灵活的、适用于柔性电子的测量方法。
一种常见的柔性电子测量方法是基于光学原理的测量方法。
通过使用光学传感器和光学测量系统,可以实现对柔性电子设备的高精度测量。
光学测量方法不需要接触物体,因此不会对柔性电子设备造成损伤。
例如,可以使用光学传感器测量柔性电子传感器的形变、压力和温度等物理量。
通过测量反射或透射光的强度变化,可以得到柔性电子设备的形变、压力和温度信息。
光学测量方法具有高精度和非接触性的优势,适用于柔性电子的高精度测量。
另一种常见的柔性电子测量方法是基于无线通信的测量方法。
可以使用无线传感器网络或RFID技术进行柔性电子设备的测量。
通过将无线传感器嵌入到柔性电子设备中,可以实现对其位置、形状和姿态的测量。
无线通信技术可以实现对柔性电子设备的实时追踪和监测。
例如,可以使用RFID标签对柔性电子设备进行标识和定位,通过无线通信传输数据并实时监测其状态。
无线通信测量方法具有远程监测和实时性的优势,适用于柔性电子设备的高精度测量。
除了光学和无线通信的测量方法,还有其他一些方法可以用于柔性电子的高精度测量。
例如,压电传感器可以通过测量电荷和电压之间的关系来实现对形变和力的测量。
磁力传感器可以通过测量磁场的变化来实现对位置和形状的测量。
压力传感器可以测量柔性电子设备受力的大小和方向。
这些传感器可以被集成到柔性电子设备中,实现对其各种物理量的高精度测量。
在柔性电子领域,已经有一些成功的高精度测量技术案例。
使用柔性电子设备进行身体运动监测的步骤随着科技的不断发展,柔性电子设备作为一项新兴技术正逐渐应用于各个领域,包括身体健康监测。
使用柔性电子设备进行身体运动监测可以帮助我们更好地了解身体的运动情况,掌握运动的效果和改善方向。
本文将介绍使用柔性电子设备进行身体运动监测的具体步骤。
第一步:选择合适的柔性电子设备首先,我们需要选择适合的柔性电子设备进行身体运动监测。
目前市场上已经有了很多种类的柔性电子设备,如可穿戴式设备、智能手环、智能鞋垫等。
根据个人的需求和喜好,选择一款适合的设备非常重要。
我们可以考虑设备的功能、可穿戴的舒适性、耗电情况以及数据的准确性等因素,来逐步缩小选择范围。
第二步:配置和激活设备在购买了合适的柔性电子设备后,我们需要按照设备说明书进行配置和激活。
通常情况下,设备会有一个对应的应用程序,我们需要下载并安装该应用程序到我们的智能手机或电脑上。
接着,通过蓝牙等方式将设备与我们的手机或电脑连接起来,并按照说明进行设备的激活操作。
第三步:设定个人运动监测目标在完成设备的配置和激活后,我们需要设定个人的运动监测目标。
这个目标可以是日常步数、消耗的卡路里、心率等等。
通过设定适当的目标,我们可以更好地监测自己的运动情况,并适时调整运动强度和频率。
第四步:佩戴和使用设备当设备配置和目标设定完成后,我们需要将柔性电子设备佩戴在身上,并开始使用。
根据不同的设备,佩戴的位置也会有所不同。
例如,智能手环通常佩戴在手腕上,智能鞋垫则放置在鞋底等。
在佩戴设备之后,我们需要确保设备与手机或电脑处于连接状态,并且设备能够正常收集和传输数据。
第五步:记录和分析运动数据在使用设备进行运动监测期间,设备会不断记录我们的运动数据,包括步数、运动距离、消耗热量等等。
这些数据通过与我们的智能手机或电脑连接的应用程序进行同步,我们可以随时查看和分析这些数据。
通过对运动数据的记录和分析,我们可以了解自己的运动习惯、运动效果以及进一步改进的方向。
基于机器人的柔性电子检具测量系统邾继贵;郭磊;刘常杰;林嘉睿;叶声华【摘要】A new measuring system of flexible electronic checking fixture on an industrial robot was proposed to overcome the shortcomings of the real special checking fixtures commonly used in industrial production with high costs, Poor flexibility and low automation. A vision sensor was fixed on the terminal tool of the industrial robot taken as the flexible automation platform. By teaching the robot to run the programmed measuring path, the every local sensor system was unified to the global system by global calibration technology. As the repetitive position error of the robot in this process is an important influencing factor on the overall system accuracy, an optical precise measuring method was presented to compensate the whole measuring results in real-time via measuring the repetitive position error by taking another camera as a control camera and combining with global control points fixed on the supporting assembly. Finally,the obtained results were campared with CAD digital module in a computer to realize the virtual flexible checking fixture function. Experimental result indicates that the o-verall three-dimensional root mean square (RMS) error of fourteen space points is 0. 101 mm,which shows that the principle of method is reasonable. It overcomes the limitation of real checking fixture in high cost, heavy waste and accuracy affected by personal errors.%针对工业生产中常用的专用实物检具成本高、柔性差、自动化程度低的缺点,提出一种工业机器人柔性电子检具测量系统.以工业机器人为柔性自动化平台,将视觉传感器固定于机器人末端工具上,利用机器人示教功能规划测量路径,通过全局标定技术将局部测量结果统一到全局坐标系中.考虑测量过程中机器人重复定位误差是影响系统整体精度的主要因素之一,采用光学精密测量方法,将另一相机作为控制相机,利用摄影测量技术结合固定于支撑部件上的全局控制点测量机器人重复定位误差,实时补偿整体测量结果.将测量数据与CAD数模比对,构造虚拟柔性电子检具功能.实验显示,系统测量14个空间点的三维总体均方根误差为0.101 mm.结果表明,提出的方法原理正确,能够克服实物检具费用高、浪费严重、人为因素影响检测精度的局限.【期刊名称】《光学精密工程》【年(卷),期】2011(019)008【总页数】7页(P1787-1793)【关键词】精密工业测量;柔性电子检具;工业机器人;近景摄影测量;激光视觉测量【作者】邾继贵;郭磊;刘常杰;林嘉睿;叶声华【作者单位】天津大学精密测试技术及仪器国家重点实验室,天津300072;天津大学精密测试技术及仪器国家重点实验室,天津300072;天津大学精密测试技术及仪器国家重点实验室,天津300072;天津大学精密测试技术及仪器国家重点实验室,天津300072;天津大学精密测试技术及仪器国家重点实验室,天津300072【正文语种】中文【中图分类】TP242.2;TP274.51 引言检具技术广泛应用于汽车工业,是控制汽车零部件和分总成制造装配精度最有效、最直观的手段。
机器人柔性扫描测量系统标定方法
王钰鑫;周志龙;刘巍
【期刊名称】《新技术新工艺》
【年(卷),期】2022()7
【摘要】为了实现复杂工件的在线快速测量,开发了一种基于工业机器人与结构光扫描仪的柔性测量系统,结构光传感器安装在机械臂末端。
针对该系统整体测量精度不足问题,提出了一种基于距离约束的手眼关系参数和机器人运动学参数联合标定方法。
首先,通过机器人单轴旋转与基于罗德里格矩阵的算法实现手眼关系初始标定;然后,建立了基于距离约束的误差模型,通过Levenberg-Marquardt算法辨识系统参数,保证了参数辨识的准确性和鲁棒性,最终实现了对手眼参数误差和机器人运动学参数误差的修正。
基于KUKA机器人和结构光扫描仪进行了标定和测量试验。
试验结果表明,在机器人的工作空间内,距离误差的最大值由0.8893 mm降低到0.4249 mm,平均值由0.7784 mm降低到0.3852 mm,验证了该标定方法的有效性。
【总页数】7页(P74-80)
【作者】王钰鑫;周志龙;刘巍
【作者单位】大连理工大学机械工程学院
【正文语种】中文
【中图分类】TP242.2
【相关文献】
1.机器人柔性视觉测量系统标定方法的改进
2.机器人柔性视觉测量系统标定方法的改进
3.机器人柔性视觉测量系统标定方法的改进措施研究
4.三维形貌柔性测量系统标定方法及验证
5.三维表面扫描机器人系统本体标定新方法
因版权原因,仅展示原文概要,查看原文内容请购买。
柔性智能化检测技术助力连杆机加质量提升在当今制造业的竞技场上,连杆加工的质量如同精密机械的心脏,其稳定与精准是整个生产流程中不可或缺的一环。
随着科技的飞速发展,柔性智能化检测技术应运而生,它就像是给连杆加工过程装上了一副敏锐的“电子眼”,不仅提升了生产效率,更确保了产品的高质量标准。
首先,让我们来探讨柔性智能化检测技术的工作原理。
这项技术利用先进的传感器、大数据分析和机器学习算法,对连杆加工过程中的每一个细节进行实时监控和分析。
它就像是一位细心的园丁,对每一朵花朵的生长环境进行精心调控,以确保它们茁壮成长。
通过这种方式,柔性智能化检测技术能够及时发现生产过程中的任何异常,并迅速采取相应措施,从而避免了潜在的质量问题。
其次,柔性智能化检测技术在提升连杆加工质量方面发挥着重要作用。
传统的检测方法往往依赖于人工检查,这不仅耗时耗力,而且容易受到主观因素的影响。
相比之下,柔性智能化检测技术就像是一台永不疲倦的机器人,它能够持续不断地对生产线上的每个环节进行精确检测,确保每一道工序都达到最佳状态。
这种高效率的工作方式大大减少了人为错误的发生,提高了产品的整体质量。
此外,柔性智能化检测技术还具有强大的数据分析能力。
通过对收集到的数据进行深入挖掘和分析,它可以揭示出生产过程中隐藏的问题和潜在的改进点。
这就像是为连杆加工过程打开了一扇通向优化的大门,使得制造商能够不断调整和改进生产策略,从而实现更高的生产效率和更好的产品质量。
最后,柔性智能化检测技术还具备良好的适应性和扩展性。
随着市场需求的变化和技术的发展,制造商可能需要对生产线进行调整或升级。
这时,柔性智能化检测技术就能够快速适应新的生产环境,并与现有的系统无缝集成。
这种灵活性使得制造商能够在激烈的市场竞争中保持领先地位。
综上所述,柔性智能化检测技术在连杆加工领域的应用带来了显著的效益。
它不仅提高了生产效率,降低了成本,还确保了产品的高质量标准。
在未来的发展中,我们可以预见柔性智能化检测技术将会成为制造业的重要支柱之一,为连杆加工乃至整个制造业带来更加辉煌的明天。
基于机器人的柔性电子检具测量系统
发表时间:2017-12-13T17:15:05.767Z 来源:《建筑科技》2017年第11期作者:唐建欣姚春涛
[导读] 对于我国目前的精密测量技术来说,面向制造现场的在线式自动化测量是其追求的最终目标,它不仅能够加强产品的生产效率和质量,还能切实减少废品率。
长城汽车股份有限公司技术中心,河北省汽车工程技术研究中心保定 071000
摘要:对于我国目前的精密测量技术来说,面向制造现场的在线式自动化测量是其追求的最终目标,它不仅能够加强产品的生产效率和质量,还能切实减少废品率。
在产品制造中,几何尺寸是最根本的参数,而且它对产品的制造精度以及质量具有非常重要的意义,在制造过程的测量和控制系统中起着非常重要的作用。
关键词:机器人;柔性;电子检具;测量系统
1 测量系统
机器人柔性电子检具测量系统由工业机器人和视觉传感器两部分组成,如图1所示。
工业机器人作为柔性运动平台,将视觉传感器安装在机器人末端工具上,机器人按照预先规划的测量路径带动传感器到指定位置进行测量。
视觉传感器由结构光传感器和控制相机两部分组成。
结构光传感器用于局部测量,控制相机用于机器人定位误差补偿。
测量前示教机器人,利用其它精密测量设备(如激光跟踪仪或摄影测量系统)结合全局标定技术精确标定各测量位置传感器局部坐标系与全局坐标系的转换关系,将各局部测量结果统一到全局坐标系中,获取被检工件整体三维数据。
2 实现原理
2.1 局部测量结构
光视觉传感器实现局部测量的原理如图2所示。
通常将相机坐标系Oc-XcYcZc作为传感器坐标系,以结构光平面上某点为原点,XY平面与光平面重合,Z轴满足右手法则建立辅助参考坐标系Or-XrYrZr,传感器数学模型如下:
式中,(Xc,Yc,Zc)为被测点在传感器坐标系下的三维坐标,(x, y)为被测点图像观测值,c为相机有效焦距,(Cx,Cy)为相机主点,(Δx,Δy)为成像畸变,r1~ r9和t1~ t3为参考坐标系到相机坐标系的转换矩阵元素。
包含(Cx,Cy)在内的相机内参及r1~ r9和t1~ t3通过预先精确标定获得[9],(x,y)从测量图像提取获得,均是已知量,利用(x,y)和相机内参数可求得图像畸变(Δx,Δy),将上述参数带入式(1)即可就得(Xc,Yc,Zc)。
2.2 全局标定系统
全局标定示意图如图3所示。
每个测量位置下,传感器视场内设置三维靶标(Tar-get),传感器测量靶标,建立传感器坐标系到靶标。
坐标系的转换关系Tst,同时利用激光跟踪仪测量靶标,建立靶标坐标系到激光跟踪仪坐标系的转换关系Ttl,另外利用激光跟踪仪测量全局控制点,建立激光跟踪仪坐标系到全局坐标系的转换关系Tlg,则传感器坐标系到全局坐标系的转换关系Tsg为:
(2)
每个测量位置下均建立传感器坐标系到全局坐标系的转换关系Tsgi(i= 1,2,… ,n;n为测量位置数),实现全局标定。
2.3 机器人定位误差
补偿工业机器人由多连杆和关节组成,属于多自由度运动机构。
运行过程中运动学模型参数受机械加工误差、装配误差、传动误差及环境温度等多种因素影响,不断发生变化,使机器人存在定位误差。
系统测量过程是机器人在固定位置姿态间反复运动,要求机器人具有很高的重复定位精度,定位误差对系统整体测量精度产生严重影响。
(3)式中,θi,αi分别为相邻X轴,Z轴间的转角;di,ai分别为相邻X轴,Z轴间的距离。
连杆参数受影响变化连续,Ai的全微分为:
(3)
由式(3)可以看出:机器人定位误差由角度和位置两类参数误差决定。
机器人运动过程中温度升高,连杆和关节热膨胀变形,角度码盘均匀膨胀,角度参数受温度影响很小,可以忽略;连杆长度受热膨胀,位置参数受温度影响较大,是导致重复定位误差的主要因素。
机器人柔性电子检具系统定位误差补偿如图4所示,Og-XgYgZg为全局坐标系;A,B,C,D为全局控制点;Oci-XciYciZci为传感器示教位置坐标系;O′ci-X′ciY′ciZ′ci为传感器实际位置坐标系;Δ为位置误差;dij表示控制点间的距离。
控制相机采集全局控制点图像,通过下式所述数学模型解算控制相机坐标系与全局坐标系的转换关系Ri和Ti:
式中,(X(g)j,Y(g)j, Z(g)j)表示全局控制点j在全局坐标系下的三维坐标,(X(ci)j, Y(ci)j, Z(ci)j)表示测量位置i下控制点j在控制相机坐标系下的三维坐标,Ri和Ti表示全局坐标系到测量位置i下控制相机坐标系的旋转矩阵和平移矩阵,(xj, yj)表示控制点j的图像观测值,(Cx,Cy)表示相机主点位置,(Δxj,Δyj)表示控制点j的图像畸变,f表示相机有效焦距,djk表示控制点j与控制点k间的空间距离,n表示全局控制点数量。
由于控制相机坐标系与结构光传感器坐标系间相对关系固定不变,传感器坐标系与示教位置的偏差与控制相机坐标系的偏差相等。
3结语:现今社会科技飞速发展,国家越来越重视对工业测量过程的控制,只有采用先进的在线测量技术,才能够有效的对工业生产的产品进行精确的测量。
利用工业机器人的性能与测量传感器相互结合,最终设计出机器人柔性在线自动测量技术可以很有效的对工业生产进行测量,提高了测量效率以及测量的准确性。
参考文献:
[1]邾继贵, 郭磊, 刘常杰,等. 基于机器人的柔性电子检具测量系统[J]. 光学精密工程, 2011, 19(8):1787-1793.。