上海大众帕萨特CAN数据总线的结构原理
- 格式:ppt
- 大小:3.80 MB
- 文档页数:64
CAN的工作原理CAN(Controller Area Network)是一种用于局域网通信的串行总线系统,最初由德国公司Bosch开发,并在1986年首次应用于汽车领域。
随着其在汽车工业领域中广泛应用,CAN总线逐渐成为许多不同领域的通信标准,如工业自动化、智能家居、机器人技术等。
CAN总线的工作原理可以简单概括为:通过一个共享总线连接多个节点,节点通过总线进行数据的收发和传输。
在CAN总线中,每个节点能够在总线上发送和接收数据,以实现节点之间的通信。
首先,CAN总线采用“广播”方式进行通信,即所有节点接收到总线上的数据,但只有特定标识符的节点会进行数据处理。
在传输数据之前,每个CAN节点都要分配一个唯一的标识符,以便其他节点可以识别该节点发送的数据。
其次,CAN总线使用双线制,在CAN总线上分为CAN_H(高级)和CAN_L(低级)两个信号线。
当CAN_H和CAN_L的电位差为0V时,表示总线空闲状态;当CAN_H和CAN_L的电位差为正负2.5V时,表示总线处于逻辑“0”状态;当CAN_H和CAN_L的电位差为正负1.25V时,表示总线处于逻辑“1”状态。
根据这种电位差的变化,可以识别总线上数据的状态。
CAN总线使用一种称为“非归零码”(Non-Return to Zero)的编码方式来提高数据传输的可靠性。
在非归零码中,逻辑“0”由电平保持不变表示,而逻辑“1”由电平翻转表示。
这种编码方式可以帮助解决信号的时钟同步问题,同时减少了信号时钟的数量。
为了保证通信的可靠性和实时性,CAN总线采用了冲突检测机制。
当一个节点发送数据到总线上时,其他节点也可能同时发送数据,出现冲突。
当发生冲突时,节点会检测到总线上的数据与其发送的数据不一致,此时会立刻终止数据发送,并将冲突检测的状态信息发送到总线上,以便其他节点能够知道发生了冲突。
通过这种方式,CAN总线可以保证多节点间的通信不会出现数据冲突。
此外,CAN总线还具备错误检测和纠正机制。
CAN的工作原理CAN(Controller Area Network)是一种广泛应用于汽车电子系统中的通信协议,它具有高可靠性、高抗干扰性和高实时性的特点。
CAN总线的工作原理是通过在多个节点之间传输数据和控制信息,实现各个节点之间的通信和协同工作。
CAN总线的工作原理可以简单描述为以下几个步骤:1. 数据帧的发送:当一个节点需要向其他节点发送数据时,它首先将数据封装成CAN数据帧。
数据帧包括标识符、数据长度、数据域和校验码等信息。
标识符用于标识数据的类型和发送节点的地址。
数据长度表示数据域中包含的数据字节数。
数据域是实际传输的数据内容。
校验码用于检测数据传输过程中的错误。
2. 数据帧的传输:CAN总线上的所有节点都可以接收到发送的数据帧。
当一个节点发送数据帧时,它将数据帧通过总线发送出去,其他节点会同时接收到这个数据帧。
这是因为CAN总线采用了多主机共享总线的方式,所有节点都可以发送和接收数据。
3. 数据帧的接收:当一个节点接收到数据帧时,它会首先检查数据帧的标识符,判断该数据帧是否是自己需要处理的数据。
如果是,则节点会解析数据帧中的数据,并根据需要进行相应的处理。
如果不是,则节点会忽略该数据帧。
4. 冲突检测和错误处理:由于多个节点可以同时发送数据帧,可能会发生数据冲突的情况。
CAN总线采用了冲突检测和错误处理机制来解决这个问题。
当多个节点同时发送数据帧时,CAN总线上会浮现数据冲突,节点会检测到这个冲突,并根据冲突检测机制进行相应的处理。
同时,CAN总线还具有错误检测和纠正机制,能够检测和纠正数据传输过程中的错误。
5. 网络管理:CAN总线上的节点可以通过网络管理协议进行网络管理。
网络管理协议可以实现节点的配置、节点的加入和退出、网络拓扑的变化等功能。
通过网络管理协议,可以实现CAN总线的灵便配置和扩展。
总结:CAN总线的工作原理是通过在多个节点之间传输数据和控制信息,实现各个节点之间的通信和协同工作。
汽车can总线工作原理汽车CAN总线工作原理。
汽车CAN总线是一种用于汽车电子系统之间进行通信的现代化技术。
CAN总线系统可以实现各种汽车电子控制单元之间的高速数据传输和通信,使得汽车各个系统可以实现协调工作,提高了汽车的整体性能和安全性。
CAN总线系统采用了一种串行通信的方式,它可以在一个总线上连接多个控制单元,通过总线上的数据帧进行通信。
CAN总线系统还具有较高的抗干扰能力,可以在汽车的恶劣环境下稳定可靠地工作。
CAN总线系统的工作原理主要包括以下几个方面:1. 数据帧格式,CAN总线系统的数据传输采用了数据帧的格式,每个数据帧包括了ID、数据、控制位等部分。
ID用于表示数据帧的优先级,数据部分用于传输实际的数据信息,控制位用于控制数据帧的发送和接收。
2. 帧的发送和接收,CAN总线系统采用了基于时间的帧发送和接收机制,通过在总线上发送和接收数据帧来实现控制单元之间的通信。
发送控制单元首先会检测总线上是否有其他数据帧正在发送,如果没有则发送自己的数据帧,如果有则等待一段时间后再次检测。
接收控制单元会在总线上接收到数据帧后进行解析和处理。
3. 网络拓扑结构,CAN总线系统可以采用总线型、星型、树型等不同的网络拓扑结构,使得多个控制单元之间可以进行灵活的连接和通信。
不同的拓扑结构对于汽车电子系统的布局和连接都有一定的影响。
4. 通信速率,CAN总线系统可以支持不同的通信速率,通常情况下可以分为低速CAN和高速CAN两种,分别用于不同的汽车电子系统之间的通信。
高速CAN通常用于发动机控制单元、变速器控制单元等需要高速数据传输的系统,而低速CAN则用于车身控制单元、娱乐系统等低速数据传输的系统。
总的来说,汽车CAN总线系统通过数据帧格式、帧的发送和接收、网络拓扑结构以及通信速率等多个方面的工作原理,实现了汽车各个电子控制单元之间的高效通信和协调工作。
这种先进的通信技术为汽车的性能、安全性和舒适性提供了强大的支持,是现代汽车电子系统中不可或缺的重要部分。
CAN的工作原理CAN(Controller Area Network)是一种串行通信协议,广泛应用于汽车、工业控制和其他领域。
CAN的工作原理是通过差分信号传输数据,实现高速、可靠的通信。
本文将从CAN的基本原理、数据传输、错误处理、帧格式和应用领域等方面进行详细介绍。
一、CAN的基本原理1.1 CAN总线结构:CAN总线由两根信号线组成,分别是CAN_H和CAN_L,通过这两根信号线进行数据传输。
1.2 差分信号传输:CAN使用差分信号传输数据,即在CAN_H和CAN_L之间传输相反的信号,以减少干扰和提高抗干扰能力。
1.3 环状拓扑结构:CAN总线采用环状拓扑结构,所有节点通过总线连接在一起,实现节点之间的通信。
二、数据传输2.1 帧格式:CAN数据传输采用帧格式,包括起始位、帧类型、数据段、CRC 校验和结束位等字段。
2.2 传输速率:CAN总线的传输速率通常为1Mbps,根据实际需求可调整传输速率。
2.3 数据传输方式:CAN支持两种数据传输方式,分别是标准帧和扩展帧,用于传输不同长度的数据。
三、错误处理3.1 错误检测:CAN总线具有强大的错误检测和纠正能力,能够检测出传输过程中的错误,并进行相应处理。
3.2 错误标识:CAN在传输过程中会生成错误标识,用于标识出错的节点和错误类型,以便及时处理。
3.3 错误处理机制:CAN采用重发机制和错误帧处理机制,确保数据传输的可靠性和稳定性。
四、帧格式4.1 标准帧:标准帧包括11位标识符,用于传输短数据,适合于实时性要求不高的应用场景。
4.2 扩展帧:扩展帧包括29位标识符,用于传输长数据,适合于实时性要求高的应用场景。
4.3 过滤机制:CAN支持过滤机制,可以根据标识符过滤接收的数据,提高数据传输的效率和准确性。
五、应用领域5.1 汽车行业:CAN在汽车行业广泛应用,用于车载电子系统之间的通信,如发动机控制、仪表盘显示、车载娱乐系统等。
5.2 工业控制:CAN在工业控制领域被广泛应用,用于PLC、传感器、执行器等设备之间的通信,实现自动化生产。

实验三熟悉XK-TB-CAN型汽车can-bus系统实训台及CAN-BUS数据总线结构及工作原理一、实验目的掌握XK-TB-CAN型汽车can-bus系统实训台的工作原理及CAN-BUS数据总线结构及原理。
二、实验设备XK-TB-CAN型汽车can-bus系统实训台三、XK-TB-CAN型汽车can-bus系统实训台的简介1.系统组成XK-TB-CAN型汽车can-bus系统实训台采用大众帕萨特汽车CAN总线系统,主要由舒适性控制电脑、左前门控制单元、右前门控制单元、左后门控制单元、右后门控制单元、各门锁及开关、仪表、点火钥匙、线路图、舒适系统元件及信号采集和测量看板组成。
如图1所示。
图1XK-TB-CAN型汽车can-bus系统实训台2.功能特点(1)充分展示CAN-BUS数据传输网络系统的组成结构和电路元件通过数据传输执行工作,清晰观察到各总成的机械结构。
(2)具有诊断连接功能,可通过汽车故障电脑诊断仪对整个动力系统和舒适系统的CAN数据传输网络及终端控制单元进行检测。
(3)通过组合仪表的网关控制连接,可把舒适系统数据网络连接,组成CAN网络系统。
(4)彩色喷绘原理图面板,并演示各开关及执行器的动态工作过程。
(5)无需蓄电池,用DC12V电源,减少充电的麻烦,电源有防短路功能。
(6)智能设置故障功能,可连接PC机使用设置故障。
(7)配置OBD-II标准诊断接口,能读取动态数据流、故障码等参数。
3.实训台正常运行模式(1)插上漏电保护电源插头,按下试验按钮,检查插头的安全性能。
(2)打开电源开关,电源开关指示灯应点亮,否则检查电源连接情况。
(3)打开点火开关,仪表指示灯亮,用手操纵控制开关按钮,闭锁器、玻璃升降器应动作正常,否则根据线路图1-9检查线路连接。
(4)每个闭锁器每个闭锁器都有一个监测点,用示波器和万用表检测总线的波形和电压。
(5)电脑解码功能,我们自带的5053软件根据使用手册安装到电脑上。
CAN的工作原理CAN(Controller Area Network)是一种广泛应用于汽车和工业领域的通信协议,它的工作原理是基于串行通信的方式进行数据传输。
CAN总线是一种多主机、多节点的通信网络,它可以连接多个设备,实现设备之间的数据交换和通信。
CAN总线的工作原理如下:1. 物理层:CAN总线采用双绞线作为传输介质,通过差分信号传输数据。
CAN总线的传输速率可根据实际需求进行调整,常见的速率有1Mbps、500kbps、250kbps等。
CAN总线的物理层标准有两种:高速CAN和低速CAN,分别适合于不同的应用场景。
2. 数据链路层:CAN总线采用CSMA/CD(Carrier Sense Multiple Access with Collision Detection)的方式进行数据传输。
在发送数据前,每一个节点会监听总线上是否有其他节点正在发送数据,如果没有,则该节点可以发送数据。
如果多个节点同时发送数据,会发生碰撞,此时节点会住手发送并等待一段随机时间后重新发送。
3. 帧格式:CAN总线的数据传输采用帧的方式进行,每一个帧由一个起始位、标识符、控制位、数据位、CRC校验位和结束位组成。
标识符用于区分不同的消息,控制位用于指示帧的类型,数据位用于存储实际传输的数据,CRC校验位用于检测数据传输的错误。
4. 网络拓扑:CAN总线可以采用总线型、星型、树型等不同的网络拓扑结构。
在总线型拓扑结构中,所有节点都连接在同一根总线上;在星型拓扑结构中,每一个节点都连接到一个中央集线器;在树型拓扑结构中,节点通过分支连接到主干上。
5. 错误处理:CAN总线具有良好的错误处理机制。
当节点在发送数据时发生错误,会触发错误帧,其他节点会收到错误帧并进行错误处理。
CAN总线还支持错误检测和错误报告,可以及时发现和纠正通信中的错误。
6. 优点:CAN总线具有高可靠性、抗干扰能力强、传输速率快、传输距离远等优点。
汽车can总线工作原理CAN总线是Controller Area Network的缩写,是一种现代汽车中常用的通信协议,它的工作原理是通过多个节点之间的串行通信来实现数据传输。
CAN总线可以用来连接车载电子设备,如发动机控制单元、防抱死制动系统、车载娱乐系统等,从而实现这些设备之间的数据交换与通信。
CAN总线的工作原理主要包括两个方面,即物理层和数据链路层。
在物理层,CAN总线使用双绞线进行通信,速率通常可达1 Mbps,在一些高性能汽车中甚至可以达到更高的速率。
在数据链路层,CAN总线使用了一种基于帧的通信协议,通过CAN控制器来控制数据的传输和接收。
CAN总线的通信协议是一种主从式的协议,它包含一个主控制器和多个从控制器。
主控制器负责协调整个网络的通信,它向网络中的其他从控制器发送指令,并且负责检测网络中其他节点发送的消息。
从控制器则负责接收主控制器发送来的指令,并向主控制器发送数据消息。
在CAN总线中,每个节点都有一个独立的标识符,用来唯一标识这个节点。
当一个节点需要向其他节点发送数据时,它会通过CAN总线发送一个帧,这个帧包含了发送节点的标识符、数据长度以及数据内容。
其他节点会接收这个帧,并根据帧中的标识符来确定是否需要处理这个数据。
在CAN总线中,数据的传输是通过一种基于抢占式的机制来实现的。
当一个节点需要发送数据时,它会先检测总线上是否有其他节点在发送数据,如果没有则可以发送自己的数据,如果有则需要等待直到总线空闲。
这种抢占式的机制可以保证数据的优先级顺序,从而保证网络中的高优先级消息能够优先得到处理。
此外,CAN总线还采用了一种CRC校验的机制来保证数据的完整性和可靠性。
每个数据帧都包含了CRC校验码,接收节点会根据这个校验码来验证接收的数据是否出错,如果出错则会向发送节点请求重新发送数据。
总的来说,CAN总线的工作原理是通过主控制器和多个从控制器之间的串行通信来实现数据的传输。
它使用了双绞线进行通信,并采用了一种基于帧的通信协议,通过抢占式的机制和CRC校验来保证数据的优先级和完整性。
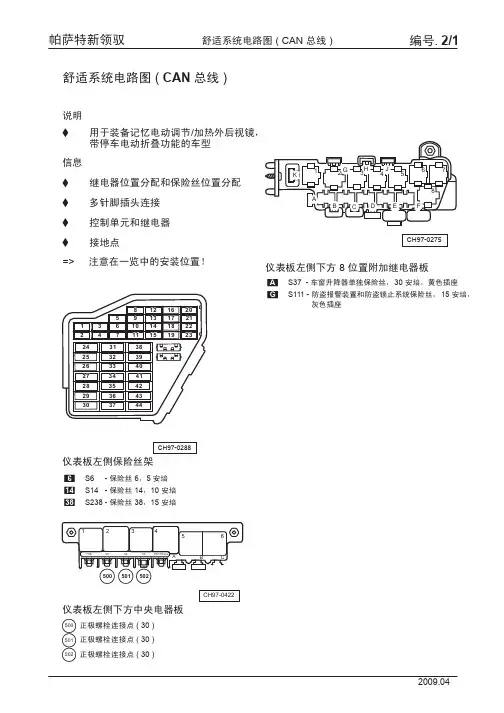
S6 - 6 5 保险丝,安培S14 - 1410 保险丝,安培S238 - 3815 保险丝,安培61438仪表板左侧保险丝架舒适系统电路图总线 ( )CAN CH97-0288=> 注意在一览中的安装位置!继电器位置分配和保险丝位置分配多针脚插头连接控制单元和继电器接地点说明信息用于装备记忆电动调节加热外后视镜,带停车电动折叠功能的车型/CH97-0422仪表板左侧下方中央电器板正极螺栓连接点 ( 30 )正极螺栓连接点 ( 30 )正极螺栓连接点 ( 30 )500501502仪表板左侧下方位置附加继电器板8 A GS37 - 30 车窗升降器单独保险丝,,黄色插座安培S111 - 15 防盗报警装置和防盗锁止系统保险丝,,灰色插座安培CH97-0275驾驶员侧车门控制单元、后部车窗升降器联锁开关、车窗升降器开关、驾驶员侧车内联锁开关、驾驶53408153535355531503953A E39E40E53E55E81E150J386L53S37V147蓄电池,在排水槽中部后部车窗升降器联锁开关,在驾驶员车门内左前车窗升降器开关,在驾驶员车门内左后车窗升降器开关驾驶员控制,在驾驶员车门内 ( )右后车窗升降器开关驾驶员控制,在驾驶员车门内 ( )右前车窗升降器开关驾驶员控制,在驾驶员车门上 ( )驾驶员侧车内联锁开关,在驾驶员车门内 驾驶员侧车门控制单元,在驾驶员车门内车窗升降器开关照明灯泡车窗升降器单独保险丝,安培,黄色插座,在仪表板左侧下方位置附加继电器板上号位30 8 A 驾驶员侧车窗升降器马达,在驾驶员车门内T10L T16c T29a 10 A 2针插头,黑色,在左柱处号位16 针插头,棕色,驾驶员侧电动摇窗机开关插头29 针插头,黑色,驾驶员侧车门控制单元插头正极螺栓连接点,在中央电器板上 ( 30 )正极连接线,在车身线束内( 30a )正极螺栓连接点,在中央电器板上 ( 30 )正极螺栓连接点,在中央电器板上 ( 30 )驾驶员侧车门控制单元、驾驶员侧中央门锁闭锁单元、左前登车照明灯F220J386T2hu T8bi T10L T29a W31驾驶员侧中央门锁闭锁单元,在驾驶员侧车门锁上驾驶员侧车门控制单元,在驾驶员车门内2 针插头,黑色,左前登车照明灯插头8 针插头,黑色,驾驶员侧中央门锁闭锁单元插头29 针插头,黑色,驾驶员侧车门控制单元插头J136带记忆的驾驶员座椅调整控制单元,在驾驶员座椅底部左侧T10g T10z T2810 A 2针插头,黑色,在左柱处号位10 A 16 针插头,灰色,在左柱处号位10 4 针插头,棕色,在驾驶员座椅底部号位左前登车照明灯,在左前车门饰板下方28 针插头,红色,带记忆的驾驶员座椅调整控制单元插头接地点,在中央继电器板左侧前部连接线,在驾驶员侧车门线束内 连接线总线的高位,在车身线束内 ( CAN )连接线总线的低位,在车身线束内 ( CAN )连接线,在车身线束内驾驶员侧车门控制单元、后视镜调节开关、后视镜调节转换开关、后视镜内折开关、车外后视镜加热正极连接线,在仪表板线束内 ( 15 )正极连接线,在仪表板线束内 ( 30 )正极连接线,在车身线束内( 30a )点火起动开关,在转向柱上部后视镜调节转换开关,在驾驶员车门内 后视镜调节开关照明后视镜调节开关,在驾驶员车门内车外后视镜加热按钮,在驾驶员车门内后视镜内折开关,在驾驶员车门内驾驶员侧车门控制单元,在驾驶员车门内29 针插头,黑色,驾驶员侧车门控制单元插头10 A 6 针插头,蓝色,在左柱处号位T10f 8 针插头,黑色,点火起动开关插头T10L 10 A 2 针插头,黑色,在左柱处号位D E43E48E231E263J386L78S6S14S238T29aT8v T10ab 10 针插头,黑色,后视镜调节开关插头正极螺栓连接点,在中央电器板上 ( 30 )保险丝,安培,车门控制单元保险丝,在仪表板左侧保险丝架上3815 保险丝,安培,车外后视镜加热按钮保险丝,在仪表板左侧保险丝架上6 5 保险丝,安培,舒适便利功能系统中央控制单元、油箱盖开启开关、内部照明灯供电保险丝,在仪表板左侧保险丝架上1410 /驾驶员侧车门控制单元、驾驶员侧后视镜调节马达、驾驶员侧可加热车外后视镜、驾驶员侧外后视镜J386L131T1bg T1bh T2gh T3dr T8cf 驾驶员侧车门控制单元,在驾驶员车门内驾驶员侧外后视镜转向信号灯灯泡,在驾驶员侧后视镜内 1 针插头,无塑壳,驾驶员侧可加热车外后视镜插头 1 针插头,无塑壳,驾驶员侧可加热车外后视镜插头 2 针插头,白色,驾驶员侧后视镜折叠马达插头3 针插头,黑色,驾驶员侧外后视镜转向信号灯灯泡插头 8 针插头,绿色,驾驶员侧后视镜调节马达插头T12bd T29a 接地连接线,在驾驶员侧车门线束内( 31 )V17V121V149驾驶员侧后视镜调节马达,在驾驶员侧后视镜内驾驶员侧后视镜折叠马达,在驾驶员侧后视镜内驾驶员侧后视镜调节马达,在驾驶员侧后视镜内驾驶员侧可加热车外后视镜,在驾驶员侧后视镜内29 针插头,黑色,驾驶员侧车门控制单元插头T10L T10g 10 A 2针插头,黑色,在左柱处号位10 A 16 针插头,灰色,在左柱处号位J136带记忆的驾驶员座椅调整控制单元,在驾驶员座椅底部左侧T10z 10 4 针插头,棕色,在驾驶员座椅底部号位T2812 针插头,黑色,在驾驶员车门内28 针插头,红色,带记忆的驾驶员座椅调整控制单元插头驾驶员侧车门控制单元、后行李箱盖遥控开锁锁止的钥匙开关、中央门锁指示灯、后行李箱盖SAFE104J386 驾驶员侧车门控制单元,在驾驶员车门内L104E188E232K133中央门锁指示灯 SAFE,在驾驶员车门内T5asT2go 2 针插头,黑色,中央门锁指示灯插头T2gn 2 针插头,黑色,后行李箱盖遥控开锁锁止的钥匙开关插头5 针插头,红色,后行李箱盖遥控开锁开关插头遥控开锁开关照明后行李箱盖遥控开锁开关,在驾驶员车门内后行李箱盖遥控开锁锁止的钥匙开关,在驾驶员车门内T10g10 A 16针插头,灰色,在左柱处号位29 针插头,黑色,驾驶员侧车门控制单元插头连接线,在驾驶员侧车门线束内( 58b )接地连接线,在驾驶员侧车门线束内( 31 )油箱盖开启开关、油箱盖板联锁装置马达、遥控开锁开关照明T5arT10aT10gT32bT2dsJ285L104E204油箱盖板联锁装置马达,在后行李箱内右侧组合仪表中带显示单元的控制单元,在仪表板左侧遥控开锁开关照明油箱盖开启开关,在驾驶员车门内10 A 8针插头,棕色,在左柱处号位5 针插头,灰色,油箱盖开启开关插头2 针插头,黑色,油箱盖板联锁装置马达插头10 A 16针插头,灰色,在左柱处号位32 针插头,绿色,组合仪表中带显示单元的控制单元插头接地连接线,在驾驶员侧车门线束内( 31 )连接线总线的高位,在仪表板线束内( CAN )连接线总线的低位,在仪表板线束内( CAN )连接线,在驾驶员侧车门线束内( 58b )连接线总线的高位,在车身线束内( CAN )连接线总线的低位,在车身线束内( CAN )接地连接线,在车身线束内( 31 )接地点,在右柱下部B左后车门控制单元、左后车窗升降器马达、左后中央门锁闭锁单元、左后登车照明灯T8t J388T18a F222T2hw T6bp 左后车门控制单元,在左后车门内V26左后车窗升降器马达,在左后车门内2 针插头,黑色,插头左后登车照明灯6 针插头,黑色,左后中央门锁闭锁单元插头左后登车照明灯,在左后车门饰板下方正极连接线,在车身线束内 ( 30a )连接线总线的高位,在车身线束内 ( CAN )接地点,在左柱下部 B 正极连接线,在车身线束内 ( 30a )连接线总线的低位,在车身线束内( CAN )连接线,在左后车门线束内左后中央门锁闭锁单元,在左后车门锁上18 针插头,黑色,左后车门控制单元插头8 B 针插头,黑色,在左柱中部前座乘客侧车门控制单元左后车门控制单元左后车窗升降器开关车窗升降器开关照明灯泡、、、E52J387J388L53接地点,在右柱下面中部 A 左后车窗升降器开关,在左后车门内前座乘客侧车门控制单元,在前座乘客车门内车窗升降器开关照明灯泡T5j T10w T18a 29 针插头,黑色,前座乘客侧车门控制单元插头18 针插头,黑色,左后车门控制单元插头10 A 3 针插头,黑色,在右柱处号位5 针插头,黑色,左后车窗升降器开关插头左后车门控制单元,在左后车门内 ( 30a )正极连接线,在车身线束内 ( 30a )正极连接线,在车身线束内前座乘客侧车门控制单元前座乘客侧中央门锁闭锁单元右前登车照明灯、、F221J387T2hv T8bj 前座乘客侧中央门锁闭锁单元,在前座乘客车门锁上前座乘客侧车门控制单元,在前座乘客车门内右前登车照明灯,在右前车门饰板下方T10w T29b 10 A 3 针插头,黑色,在右柱处号位29 针插头,黑色,前座乘客侧车门控制单元插头2 针插头,黑色,插头右前登车照明灯8 针插头,黑色,前座乘客侧中央门锁闭锁单元插头接地连接线,在前座乘客侧车门线束内 ( 31 )连接线,在前座乘客侧车门线束内前座乘客侧车门控制单元前座乘客侧后视镜调节马达、前座乘客侧后视镜折叠马达、前座乘客侧可、V25前座乘客侧后视镜调节马达,在前座乘客后视镜内J387L132前座乘客侧车门控制单元,在前座乘客车门内前座乘客侧外后视镜转向信号灯灯泡,在前座乘客侧后视镜内T12a T29b J136带记忆的驾驶员座椅调整控制单元,在驾驶员座椅底部左侧T10aa 29 针插头,黑色,前座乘客侧车门控制单元插头T2810 A 16 针插头,绿色,在右柱处号位12 针插头,黑色,在右前车门内V122V150Z5前座乘客侧后视镜折叠马达,在前座乘客后视镜内前座乘客侧后视镜调节马达,在前座乘客后视镜内前座乘客侧可加热车外后视镜,在前座乘客侧后视镜内连接线总线的高位,在车身线束内 ( CAN )连接线总线的低位,在车身线束内 ( CAN )连接线,在车身线束内T10w T8cg T3ds T2hr T1bL T1bk T10z 10 A 3针插头,黑色,在右柱处号位8 针插头,绿色,前座乘客侧后视镜调节马达插头3 针插头,黑色,前座乘客侧外后视镜转向信号灯灯泡插头2 针插头,白色,前座乘客侧后视镜折叠马达插头1 针插头,无塑壳,前座乘客侧可加热车外后视镜插头1 针插头,无塑壳,前座乘客侧可加热车外后视镜插头10 4 针插头,棕色,在驾驶员座椅底部号位28 针插头,红色,带记忆的驾驶员座椅调整控制单元插头前座乘客侧车门控制单元前座乘客侧车窗升降器马达前座乘客侧车窗升降器开关、车窗升降器开关照明灯泡、、E107J387J136L53T5f T10g T10z T10aa T28前座乘客侧车窗升降器开关,在前座乘客侧车门上前座乘客侧车门控制单元,在前座乘客车门内带记忆的驾驶员座椅调整控制单元,在驾驶员座椅底部左侧车窗升降器开关照明灯泡5 针插头,黑色,前座乘客侧车窗升降器开关插头10 A 16 针插头,灰色,在左柱处号位10 4 针插头,棕色,在驾驶员座椅底部号位T29b 29 针插头,黑色,前座乘客侧车门控制单元插头10 A 16 针插头,绿色,在右柱处号位28 针插头,红色,带记忆的驾驶员座椅调整控制单元插头前座乘客侧车窗升降器马达,在前座乘客车门内正极连接线,在车身线束内( 5v )右后车门控制单元右后车窗升降器马达右后车窗升降器开关车窗升降器开关照明灯泡、、、T8u 8 B 针插头,黑色,在右柱中部右后车门控制单元,在右后车门内右后车窗升降器马达,在右后车门内5 针插头,黑色,右后车窗升降器开关插头车窗升降器开关照明灯泡接地点,在右柱下部B 右后车窗升降器开关,在右后车门内18 针插头,黑色,右后车门控制单元插头E54T5g L53T18b J389连接线总线的低位,在车身线束内( CAN ) ( 30a )正极连接线,在车身线束内右后车门控制单元右后中央门锁闭锁单元右后登车照明灯、、F223J389右后中央门锁闭锁单元,在右后车门锁上右后车门控制单元,在右后车门内右后登车照明灯,在右后车门饰板下方T2hx T6bh T8u T18b 2 针插头,黑色,插头右后登车照明灯6 针插头,黑色,右后中央门锁闭锁单元插头8 B 针插头,黑色,在右柱中部18 针插头,黑色,右后车门控制单元插头连接线总线的高位,在车身线束内( CAN ) 连接线,在右后车门线束内 ( 30a )正极连接线,在车身线束内化妆镜接触开关、滑动天窗开关照明灯泡、化妆镜照明灯、中部阅读灯、前部车内照明灯、中控台照明128R57R6连接线,在车顶线束内W W14W20W39W40前部车内照明灯,在车顶前部中间前座乘客侧化妆镜照明灯,在车顶前部右侧驾驶员侧化妆镜照明灯,在车顶前部左侧左侧中部阅读灯,在前部内顶灯上右侧中部阅读灯,在前部内顶灯上F147F148L65L150T2es T2eq T2et T2ep T2gt T6dr 驾驶员侧化妆镜接触开关,在驾驶员侧遮阳板内前座乘客侧化妆镜接触开关,在前座乘客侧遮阳板内滑动天窗开关照明灯泡,在天窗调节器内中控台照明,在内顶灯上T10o 10 A 3 针插头,浅蓝色,在左柱处号位6 针插头,黑色,前部车内照明灯插头2 针插头,黑色,驾驶员侧化妆镜照明灯插头2 针插头,白色,在内顶灯上2 针插头,黑色,前座乘客侧化妆镜照明灯插头2 针插头,黑色,前座乘客侧化妆镜接触开关插头2 针插头,黑色,驾驶员侧化妆镜接触开关插头连接线,在车顶线束内接地连接线,在车顶线束内行李箱照明灯开关阅读灯后部车内照明灯行李箱照明灯手套箱照明灯、、、、W11W12左后阅读灯,在车顶后部中间右后阅读灯,在车顶后部中间后部车内照明灯,在车顶后部中间T4cuT10f10 A 3针插头,浅蓝色,在左柱处号位4 针插头,黑色,后部车内照明灯插头10 A 6针插头,蓝色,在左柱处号位连接线,在车顶线束内接地连接线,在车顶线束内接地点,在中央继电器板左侧后部T10oF5T2dy行李箱照明灯开关,在后行李箱盖锁上2 针插头,黑色,行李箱照明灯开关插头T2ebT2hp2 针插头,黑色,行李箱照明灯插头2 针插头,黑色,手套箱照明灯插头W3W6行李箱照明灯,在后行李箱内顶部中间手套箱照明灯,在前座乘客手套箱内接地点,在左柱下部B接地连接线,在仪表板线束内( 31 )连接线,在车顶线束内正极连接线,在车身线束内( 30a )连接线,在车顶线束内接地连接线,在车身线束内( 31 )接地连接线,在车身线束内( 31 )连接线,在车身线束内用于装备带天窗的车型用于装备不带天窗的车型***舒适便利功能系统中央控制单元、后行李箱盖中央门锁马达/J245J393滑动天窗调节控制单元,在车顶前方中间内顶灯旁舒适便利功能系统中央控制单元,在驾驶员侧搁脚空间下面/ T2dz T6cc T6dd T10o 23 / 针插头,黑色,舒适便利功能系统中央控制单元插头T23 2 针插头,黑色,后行李箱盖中央门锁马达插头6 针插头,蓝色,在前部内顶灯上方6 针插头,蓝色,滑动天窗调节控制单元插头10 A 3 针插头,浅蓝色,在左柱处号位后行李箱盖中央门锁马达,在行李箱盖内右侧连接线总线的高位,在车身线束内 ( CAN )连接线总线的低位,在车身线束内 ( CAN )正极连接线,在车身线束内 ( 30a )接地连接线,在车身线束内( 31 )连接线,在车身线束内舒适便利功能系统中央控制单元、后行李箱盖把手开锁按钮、后行李箱盖锁芯开锁按钮 /J393车灯开关,在仪表板左侧出风口下方后行李箱盖把手开锁按钮,在行李箱盖中部后行李箱盖锁芯开锁按钮,在行李箱盖后部右侧滑动天窗调节控制单元,在车顶前方中间内顶灯旁舒适便利功能系统中央控制单元,在驾驶员侧搁脚空间下面/E1E234F248J245T10LT10o10 A 2针插头,黑色,在左柱处号位10 A 3针插头,浅蓝色,在左柱处号位T17T2317 针插头,黑色,车灯开关插头23 /针插头,黑色,舒适便利功能系统中央控制单元插头T2bh 2 针插头,黑色,插头后行李箱盖把手开锁按钮T3abT6ccT6dd3 针插头,黑色,插头后行李箱盖锁芯开锁按钮6 针插头,蓝色,在前部内顶灯上方6 针插头,蓝色,滑动天窗调节控制单元插头连接线,在仪表板线束内( 58d )正极连接线,在车身线束内( 30a )正极连接线,在车身线束内( 58d )连接线,在车身线束内T10f10 A 6针插头,蓝色,在左柱处号位接地连接线,在车身线束内( 31 )舒适便利功能系统中央控制单元、中央门锁和防盗报警装置天线/D J245J285J393点火起动开关,在转向柱上部滑动天窗调节控制单元,在车顶前方中间内顶灯旁组合仪表中带显示单元的控制单元,在仪表板左侧T6cc T6dd T10f T10v T10ae T15T15ab+3T16T23T32a 舒适空间下面/ 10 A 6 针插头,蓝色,在左柱处号位10 A 6 针插头,淡红色,在右柱处号位10 A 11 针插头,灰色,在右柱处号位15 / 针插头,黑色,舒适便利功能系统中央控制单元插头18 A 1 针插头,绿色,在左柱处号位23 / 针插头,黑色,舒适便利功能系统中央控制单元插头6 针插头,蓝色,在前部内顶灯上方6 针插头,蓝色,滑动天窗调节控制单元插头T8v 8 针插头,黑色,点火起动开关插头16 针插头,黑色,自诊断接口插头,在仪表板左侧下方32 针插头,蓝色,组合仪表中带显示单元的控制单元插头R47S111中央门锁和防盗报警装置天线,在右柱上A 防盗报警装置和防盗锁止系统保险丝,安培,灰色插座,在仪表板左侧下方位置附加继电器板上号位15 8 G 连接线诊断线,在仪表板线束内( K )连接线,在仪表板线束内连接线,在仪表板线束内 ( 86s )正极连接线右转向信号,在仪表板线束内 ( )接地点,在驾驶员搁脚空间,近左柱处 A 正极连接线左转向信号,在仪表板线束内 ( )。
CAN的工作原理CAN(Controller Area Network)是一种广泛应用于汽车和工业领域的通信协议,它的工作原理是通过在一个总线上连接多个节点,实现节点之间的数据交换和通信。
本文将详细介绍CAN的工作原理。
一、总线结构CAN总线由两根线组成:CAN_H(CAN High)和CAN_L(CAN Low)。
这两根线通过电阻终止器连接在一起,形成一个环路。
CAN总线上的每一个节点都通过一个收发器与CAN总线相连。
二、数据帧格式CAN数据帧由四个部份组成:起始位、标识符、控制位和数据域。
起始位用于同步数据传输,标识符用于区分不同的数据源,控制位包含数据帧的类型和长度信息,数据域则是实际的数据内容。
三、工作模式CAN总线有两种工作模式:数据帧模式和远程帧模式。
数据帧模式用于节点之间的实际数据传输,远程帧模式用于请求其他节点发送数据。
四、帧ID每一个节点在CAN总线上都有一个惟一的帧ID。
帧ID由11位或者29位组成,取决于CAN的版本。
较短的帧ID用于标识标准帧,较长的帧ID用于标识扩展帧。
五、数据传输CAN总线上的数据传输是基于事件触发的。
当一个节点有数据要发送时,它会检查总线是否空暇,如果空暇,则开始发送数据。
如果多个节点同时发送数据,会发生冲突,这时会根据CAN的冲突检测机制进行处理。
六、错误检测CAN总线具有强大的错误检测和纠正能力。
每一个节点在发送数据时会监测总线上的数据是否与发送的数据一致,如果不一致,则会触发错误处理机制。
七、速率控制CAN总线的速率通常由波特率来表示,常见的波特率有125Kbps、250Kbps和500Kbps等。
波特率的选择取决于传输的数据量和总线的长度。
八、网络拓扑CAN总线可以采用多种网络拓扑结构,包括总线型、星型和混合型。
总线型是最常见的拓扑结构,所有节点都连接在同一根总线上。
星型拓扑结构中,每一个节点都与一个中央控制器相连。
混合型拓扑结构则是总线型和星型的结合。
汽车can总线系统原理今天咱们来唠唠汽车里超酷的CAN总线系统。
你要是以为汽车里的线路就像家里电器那种简单的电线连接,那可就大错特错啦!CAN总线系统就像是汽车的神经系统一样。
想象一下,汽车里有各种各样的零部件,就像人的身体有各种器官一样。
发动机、变速器、仪表盘、车门锁、车窗等等,它们都得互相“聊天”,告诉彼此自己的状态,这样汽车才能好好工作。
比如说,发动机得告诉仪表盘自己转得多快了,这样仪表盘上的转速表才能显示正确的数字。
那CAN总线是怎么做到让它们互相通信的呢?这就很有趣啦。
它就像是一条信息高速公路,不过这条公路不是让汽车跑的,而是让数据跑的。
在这条总线上,数据是以一种很特别的方式传输的。
每个设备都有自己的身份标识,就像我们人有名字一样。
当一个设备要发送信息的时候,它就会把带有自己身份标识和要传达的内容的数据放到这条总线上。
比如说,你按下了车窗的上升按钮。
这个车窗控制器就会在CAN总线上发出一个信号,这个信号就像是在喊:“我是车窗控制器,我要让车窗升起来啦!”然后其他的设备听到这个信号,但是只有和车窗相关的设备才会去处理这个信息,就像只有负责供电的设备才会给车窗电机提供电力让车窗上升。
CAN总线还有一个很厉害的地方,就是它能够处理很多不同类型的数据。
不管是像发动机那种需要快速传输的大量数据,还是像车门锁那种偶尔才发送一次的简单数据,它都能搞定。
这就好比一个超级管家,既能处理紧急的大事,也能照顾到那些琐碎的小事。
而且哦,CAN总线还很聪明地避免了数据冲突。
就像在马路上,车来车往的,如果大家都乱开,肯定会撞车。
在CAN总线上,如果有两个设备同时发送数据,它有一套巧妙的机制来决定谁先谁后,就像交通规则一样。
这样就保证了数据传输的有序性。
你再想想看,汽车里的环境多复杂呀,有各种电磁干扰。
CAN总线就像一个坚强的小战士,它能够抵抗这些干扰,确保数据准确无误地传输。
要是没有它这么厉害,汽车里的数据就会乱成一团麻,那汽车可能就会出现各种奇怪的故障啦。
大众车系CAN-BUS的原理与检修(二)6 CAN数据总线系统的故障检修6.1一般检修步骤通过对以上3种汽车数据总线系统故障的分析,可以总结出该系统一般检修步骤。
a.了解该车型的汽车数据总线系统特点,包括:传输介质、几种子网及汽车数据总线系统的结构形式等。
b. 汽车数据总线系统的功能,如有无唤醒功能和休眠功能等。
c.检查汽车电源系统是否存在故障,如交流发电机的输出波形或点火高压电路是否正常(若不正常将导致信号干扰等故障)等。
d.检查汽车数据总线系统的链路是否存在故障,采用替换法成采用跨线法进行检测。
e.如果是节点故障,只能采用节点替换法进行检侧。
6.2 CAN数据总线系统的故障自诊断中央数据控制单元(网关)与自诊断K线相连.CAN数据总线与K线可以实现数据交换。
利用大众 V.A.G.1551、V.A.G.1552或V.A.S.5051电控单元诊断仪,可以读取与CAN数据总线有关的故障码,也可以显示相关数据流。
实施方法与一般电控系统的自诊断相同。
6.2.1宝来动力CAN数据总线系统的故障码查询使用V.A.G.1551、V.A.G.1552或V.A.S.5051电控单元诊断仪,分别进人01、02, 03地址,对发动机、ABS/EDL和自动变速器电控单元进行自诊断,再进人功能码02查询3块电控单元是否储存CAN数据总线的故障码。
举例宝来1.8 T轿车AUM发动机控制单元CAN数据传愉故降码:SAE码P1626、VAG 码18034----- 数据总线缺少来自自动变速器控制单元的信息;SAE码P1636、VAG码18004---致据总线缺少来自安全气囊控制单元的信息:SAE码P1648、VAG码18056-数据总线损坏;SAE码P1649、VAG码18057-数据总线缺少来自ABS/EDL控制单元的信息;SAE码P1650、VAG码18058-数据总线缺少来自组合仪表控制单元的信息;SAE码P1682、VAG码18090-一数据总线中来自ABS/EDL控制单元的信号不可靠;SAE码P1683、VAG 码18091-数据总线中来自安全气囊控制单元的信号不可靠;SAE码P1683、VAG码18261-数据总线中来自ABS/EDL控制单元的信号不可靠。
常州机电职业技术学院毕业设计(论文)作者:吴先锋学号:30821232 系部:汽车工程系专业:汽车电子技术题目:帕萨特B5CAN总线系统与检修指导者:刘平评阅者:年月毕业设计(论文)中文摘要近几年来,随着我国经济的持续发展,汽车的需求量继续保持高速的增长。
并随着电子技术的发展,越来越多的汽车上采用了CAN总线系统通信协议。
汽车CAN总线技术是一种全新的汽车电控系统信息通信方式,是实现各个控制单元之间的数据交换而开发的一种串行通信协议,适应汽车恶劣的工作环境和通信速度要求,在信息传递,资源共享方面有着独特的优势,并可有效减少线束的长度和节点数量;同时汽车CAN总线有着自身独特的结构、工作特性以及相应的故障特点,对其性能的检测、故障的诊断和排除也有着重要的特点。
本论文就是以帕萨特B5CAN总线系统作为试验设计对象,从它的组成、工作原理、以及对其故障点的分析和排除等方面,结合实际情况,分析数据,了解此类帕萨特B5CAN总线系统故障的发生、检测、排除的过程。
关键词:CAN总线原理电路分析检测维修毕业设计(论文)外文摘要Title:Passat B5CAN bus system and overhaulAbstract:In recent years, along with our country economy continues to develop, car demand keep high-speed growth. And with the development of electronic technology, more and more vehicles used on the CAN bus system communication protocols.Auto the can bus technology is a kind of brand-new automotive electronic control system information communication mode, is to realize various control units of data exchange and the development of a serial communication protocol, adapt to the car bad working environment and communications speed requirements, in information transfer, resource sharing is a unique advantage, and CAN effectively reduce the wire length and the number of node, While automobiles thecan bus has its unique structure, working characteristics and corresponding fault characteristics, its performance testing, fault diagnosis and eliminate also has important characteristics.This thesis is to B5CAN bus system as an experiment passat design object, from its composition, working principle, and the breakdown analysis and elimination of, and combining with actual situation, analyze data, understand such passat B5 system of failure, testing, eliminate process.Keywords: CANbus Theory Circuit Analysis Detection Maintenance目录1 绪论 (1)1.1帕萨特B5CAN总线系统简介 (1)1.2帕萨特B5CAN总线系统基本概念 (3)1.3发展现状 (4)2 帕萨特B5CAN总线的通信协议 (6)3 帕萨特B5CAN总线系统的组成 (10)3.1CAN控制器 (10)3.2CAN收发器 (14)3.3传输介质 (16)3.4数据传输终端 (18)3.5网关 (19)3.6智能服务器 (19)4 帕萨特B5 CAN总线系统的工作原理与主要优点 (20)4.1工作原理 (20)4.2主要优点 (20)5 帕萨特B5 CAN总线系统的电路分析 (22)5.1帕萨特B5动力CAN总线的电路分析 (22)5.2帕萨特B5舒适CAN总线的电路分析 (22)6 帕萨特B5CAN总线系统的故障诊断与案例分析 (24)6.1帕萨特B5CAN总线系统的故障形式 (24)6.2帕萨特B5CAN总线的故障诊断步骤 (25)6.3帕萨特B5CAN总线系统的检测内容 (25)6.4帕萨特B5CAN总线故障类型及案例分析 (27)6.4.1 故障类型 (27)6.4.2 CAN总线上常见的故障部位 (30)结论 (31)致谢 (32)参考文献 (33)1 绪论20世纪80年代,随着汽车技术日新月异的发展,现代的汽车上使用了大量的电子控制装置,为了简化线路,提高各控制单元之间的通信速度,降低故障频率,一种新型的数据网络---车载控制器局域网CAN数据总线应运而生,CAN总线具有实时性强,结构简单,互操作性好,总线协议具有完善的错误处理机制,灵活性高和价格低廉等特点。
一文看懂汽车CAN总线技术原理随着现代汽车技术的不断发展,CAN总线逐渐成为现代汽车上不可缺少的技术,并大大推动了汽车技术的高速发展。
本文将对汽车CAN 总线技术的工作原理、特点及优点,CAN总线在汽车制造中的应用及发展趋势做了简单介绍,具体的跟随小编一起来了解一下。
CAN总线的由来由于现代汽车的技术水平大幅提高,要求能对更多的汽车运行参数进行控制,因而汽车控制器的数量在不断的上升,从开始的几个发展到几十个以至于上百个控制单元。
控制单元数量的增加,使得它们互相之间的信息交换也越来越密集。
为此德国BOSCH 公司(和inter 公司共同)开发了一种设计先进的解决方案-CAN 数据总线,提供一种特殊的局域网来为汽车的控制器之间进行数据交换。
CAN 是ControllerAreaNetwork 的缩写,称为控制单元的局域网,它是车用控制单元传输信息的一种传送形式。
CAN总线技术简介CAN总线又称作汽车总线,全称为“控制器局域网(Controller Area Network)”,意思是区域网络控制器,它将各个单一的控制单元以某种形式(多为星形)连接起来,形成一个完整的系统。
在该系统中,各控制单元都以相同的规则进行数据传输交换和共享,称为数据传输协议。
CAN总线最早是德国Bosch公司为解决现代汽车中众多的电控模块(ECU)之间的数据交换而开发的一种串行通讯协议。
在工程实际中CAN总线是对汽车中标准的串行数据传输系统的习惯叫法。
随着车用电气设备越来越多,从发动机控制到传动系统控制,从行驶、制动、转向系统控制到安全保证系统及仪表报警系统,使汽车电子系统形成一个复杂的大系统,并且都集中在驾驶室控制。
另外,随着近年来智能运输系统(ITS)的发展,以3G(GPS、GIS和GSM)为代表的新型电子通讯产品的出现,它对汽车的综合布线和信息的共享交互提出了更高的要求。
CAN 总线正是为满足这些要求而设计的。
CAN总线主要有四部分组成:导线、控制器、收发器和终端电阻。