步进电机微机控制(数字传动)
- 格式:ppt
- 大小:827.00 KB
- 文档页数:52
步进控制原理
步进电机是一种数字控制的直线运动装置,它根据输入的脉冲信号,带动主轴旋转,达到步进的目的。
步进电机的结构主要由主轴、转动部件、旋转编码器和控制器组成。
步进电机是一个由交流电压供电的精密机械装置,它的转动部件是一个同步带,沿着一个固定的角度旋转。
通过步进电机和计算机连接,计算机就可以计算出步进电机的旋转角度,从而控制步进电机的速度和方向。
1.步进电机的结构
步进电机是由定子、转子、驱动器等部件组成的。
定子由一块圆形硅钢片做成,并在硅钢片上开有多个槽,用于安装转子。
转子是一个具有多个定子绕组(线圈)和一个旋转部件(转子),绕组和转子之间通以电流。
每个定子绕组由一个电压线圈和一个电流线圈组成,电流线圈被连接到一个磁场中,它与磁场相互作用产生电流。
2.步进电机工作原理
步进电机工作时,电动机转子以每分钟旋转360°的速度转动;当改变负载时,电动机转子也要随之改变位置(即加载或卸载)。
—— 1 —1 —。
步进电机控制系统原理步进电机控制系统的原理是控制步进电机运动,使其按照既定的速度和步长进行转动。
步进电机是一种特殊的电机,它通过控制输入的脉冲信号来驱动转子旋转一定的角度,步进电机每接收到一个脉冲信号,转子就会转动一定的角度,因此可以精确控制电机的位置和速度。
控制器是步进电机控制系统的核心部分,它通过软件算法生成脉冲信号来控制步进电机转动。
脉冲信号的频率和脉宽可以调节,频率决定步进电机转动的速度,脉宽决定步进电机转动的步长。
通常采用微处理器作为控制器,通过编程来控制脉冲信号的生成。
驱动器是将控制器产生的脉冲信号转换为电流信号,驱动步进电机转动。
驱动器通常由一个或多个功率晶体管组成,通过开关控制来产生恰当的电流信号。
驱动器还可以采用电流反馈回路来实现闭环控制,提高步进电机的控制精度。
步进电机是根据驱动器的电流信号转动的执行部件,它通过电磁力和磁场相互作用来实现转动。
步进电机根据控制器产生的脉冲信号确定转动的角度和速度。
步进电机一般由定子和转子组成,定子上有若干个电磁线圈,转子上有若干个永磁体。
当驱动器给定一个电流信号时,电流通过定子线圈产生磁场,与转子上的永磁体相互作用,使转子转动一定的角度。
当驱动器改变电流信号时,磁场方向改变,转子转动的角度和方向也会改变。
步进电机控制系统的原理就是通过控制器产生脉冲信号,驱动器将脉冲信号转换为电流信号,通过电流信号驱动步进电机转动。
控制器根据需要调整脉冲信号的频率和脉宽,从而控制步进电机的转动速度和步长。
驱动器根据电流信号的大小和方向控制步进电机的转动角度和方向。
步进电机根据电磁力和磁场相互作用来实现转动。
通过调节脉冲信号的频率和脉宽,可以实现对步进电机的精确控制。
步进电机控制方案1. 引言步进电机是一种常见的电动机,其特点是精准度高、扭矩稳定、可控性强等。
在许多应用中,需要对步进电机进行控制,以实现精准定位、旋转控制等功能。
本文将介绍步进电机的控制方案,并提供示例代码和运行结果。
2. 步进电机工作原理步进电机是一种定角度运动的电机,其工作原理基于磁场变化导致的转动。
步进电机由转子和定子组成,转子上有一系列的磁极,定子上有一组电枢。
通过依次通电给定子上的电枢,使得磁场依次在转子上形成,从而实现转子的连续旋转。
3. 步进电机控制方案步进电机的控制方案主要包括驱动器和控制器两部分。
驱动器用于控制步进电机的转动,控制器用于更精确地控制电机的运转。
3.1 驱动器选择常见的步进电机驱动器有两相、三相和四相驱动器。
根据实际应用需求,选择适合的驱动器可以提高电机的性能和效率。
以下是常见的驱动器选择情况:•两相驱动器:适用于低速应用,价格较低,但扭矩输出相对较低。
•三相驱动器:适用于高速和高扭矩应用,价格相对较高,但性能更好。
•四相驱动器:适用于中等速度和扭矩要求的应用。
3.2 控制器设计在步进电机控制中,控制器的设计是至关重要的。
控制器需要实现以下功能:•步进电机的速度控制:控制脉冲信号的频率和宽度,可以实现步进电机的高速或低速运动。
•步进电机的方向控制:控制脉冲信号的方向,可以实现步进电机的正转或反转。
•步进电机的位置控制:根据应用需求,设定目标位置和运动方式,通过控制脉冲信号的数量和频率,控制步进电机到达目标位置。
通常情况下,可以使用单片机或专用控制器来设计步进电机的控制器。
以下是一个简单的步进电机控制器的伪代码示例:def step_motor_control(target_position):current_position = 0while current_position != target_position:if target_position > current_position:# 正转move_forward()current_position += 1else:# 反转move_backward()current_position -= 1delay(1) # 控制电机运动速度4. 示例代码下面是一个使用Arduino控制步进电机的示例代码,该代码实现了步进电机的转动和控制:#include <Stepper.h>const int stepsPerRevolution = 200; // 步进电机每转的步数Stepper stepper(stepsPerRevolution, 8, 9, 10, 11); // 步进电机驱动器引脚void setup() {stepper.setSpeed(100); // 设置步进电机转速}void loop() {// 顺时针旋转一个圈stepper.step(stepsPerRevolution);delay(1000);// 逆时针旋转半个圈stepper.step(-stepsPerRevolution / 2);delay(1000);}5. 运行结果通过运行上述示例代码,可以实现步进电机的转动和控制。
步进电机控制方法步进电机是一种将电信号转换为精确的机械运动的特殊电机。
由于其高精度、可控性和稳定性,步进电机广泛应用于许多领域,如工业自动化、医疗仪器、机器人技术等。
本文将讨论步进电机的控制方法,在这些方法中,人们可以实现对步进电机的精确控制和位置控制。
首先,我们来介绍步进电机的基本工作原理。
步进电机的转子由永磁体或由电磁铁组成,通常与定子上的绕组相互作用。
当绕组依次激励时,电机的转子会按照一定的角度顺序旋转。
每次激励的脉冲将使转子转动一个固定的角度,称为步长。
因此,通过正确控制脉冲信号的频率和顺序,我们可以精确地控制步进电机的运动。
步进电机的控制方法主要分为开环控制和闭环控制。
开环控制是最简单的一种方法,通过给步进电机提供一系列的脉冲信号来控制其转动。
这些信号的频率和脉冲宽度决定了电机的转速和位置。
开环控制方法适用于需要较低精度和较简单控制的应用,例如简单的运动控制和位置复位。
闭环控制方法则更加复杂,但也更加精确。
闭环控制通过使用编码器或其他位置传感器来监测步进电机的实际位置,并将其与期望位置进行比较。
根据比较结果,控制系统将调整脉冲信号的频率和脉冲数量,以使电机达到期望的位置和运动状态。
闭环控制方法适用于需要高精度和复杂运动控制的应用,例如精密仪器和机器人。
除了开环控制和闭环控制之外,还有其他一些常用的步进电机控制方法。
例如,微步控制方法可以进一步提高步进电机的分辨率。
微步控制通过将每个步进脉冲细分为更小的微步脉冲,从而将电机的角度控制能力提高到更高的级别。
这种方法通常需要更先进的控制电路和算法。
此外,还有一些高级的控制方法,如矢量控制和感应控制等。
矢量控制方法通过同时控制步进电机的多个绕组来实现更复杂的运动模式,提高电机的性能和动态响应能力。
感应控制方法则利用感应原理,通过识别转子位置和磁场变化来控制电机运动。
这些高级控制方法在某些特定的应用领域中具有重要意义,但通常需要更复杂的控制算法和硬件实现。
步进电机控制步进电机是一种将电脉冲信号转换为精确的机械运动的设备,广泛应用于各种自动化领域。
步进电机控制是指通过发送特定的电信号以控制步进电机的运动方式和速度。
在工业和科技领域,步进电机被广泛应用于需要精确位置控制的设备中,如打印机、数控机床、自动化设备等。
步进电机原理步进电机是一种将电能转换为机械能的电动机,其工作原理基于电磁感应。
步进电机的转动是通过将电流施加到电机的不同线圈来实现。
根据所施加的电流脉冲信号以及电机内部的设计结构,步进电机可以实现准确的位置控制和旋转。
步进电机控制方式步进电机的控制方式通常可以分为开环控制和闭环控制两种。
开环控制开环控制是指在控制步进电机时,只考虑输入的电脉冲信号,而不考虑电机实际的运动状态。
这种控制方式简单、成本低,适用于一些对精度要求不高的应用场景。
但是开环控制无法检测电机是否按照要求准确运动,容易出现误差积累的情况。
闭环控制闭环控制是指在控制步进电机时,通过反馈系统实时监测电机的位置和速度,从而调整输出的控制信号,以实现更精准的位置控制。
闭环控制可以大大提高步进电机系统的准确性和稳定性,适用于对位置精度要求较高的场景。
步进电机控制器步进电机控制器是控制步进电机运动的关键设备,它负责接收外部输入的控制信号,并将其转换为适用于步进电机的驱动信号。
步进电机控制器通常包括信号输入模块、信号处理模块、驱动电路模块等组成部分。
步进电机控制器可以通过编程控制电机的转动角度、速度和方向等参数,实现复杂的运动控制功能。
现今的步进电机控制器普遍支持多种通信接口,如RS232、USB、以太网等,便于与上位机或其他设备进行数据交互和控制。
步进电机控制应用步进电机控制被广泛应用于各种自动化和机械设备中,例如:•打印设备:打印机中的打印头移动、纸张进纸等功能均通过步进电机控制实现;•数控机床:数控加工设备中的轴向移动、工具刀具选择等操作依赖于步进电机控制;•机器人:工业机器人中的运动控制、臂的旋转等动作也是通过步进电机控制完成。
步进电机的单脉冲控制、双脉冲控制、开环控制和闭环控制
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机的单脉冲控制与双脉冲控制步进电机的控制有单电压和高低电压控制之分;
单电压控制用一串脉冲信号控制一个电子开关的通、断来控制电机驱动绕组得电、失电;高低电压控制在单电压控制的基础上,用另一串脉冲控制一个电子开关的通、半导通,两个开关串联,两个控制脉冲同频率但不同相位和宽度。
达到给绕组的供电电压全、一半、迅速关断的目的。
步进电机的开环控制和闭环控制步进电机的开环控制
1、步进电机开环伺服系统的一般构成
步进电动机的电枢通断电次数和各相通电顺序决定了输出角位移和运动方向,控制脉冲分配频率可实现步进电动机的速度控制。
因此,步进电机控制系统一般采用开环控制方式。
图为开环步进电动机控制系统框图,系统主要由控制器、功率放大器、步进电动机等组成。
2、步进电机的控制器
1、步进电机的硬件控制
步进电动机在个脉冲的作用下,转过一个相应的步距角,因而只要控制一定的脉冲数,即。

一、实验目的1. 熟悉步进电机的工作原理和特性。
2. 掌握通过微机控制步进电机的基本方法。
3. 了解步进电机在微机控制下的应用。
二、实验原理步进电机是一种将电脉冲信号转换为角位移或线位移的电机,其特点是步进角固定,控制精度高,响应速度快。
步进电机的工作原理是:当给步进电机输入一定频率的脉冲信号时,电机就会以一定的步进角进行旋转。
步进电机的控制方式主要有以下几种:1. 单相控制:将步进电机绕组分为A、B、C、D四相,每相依次通电,实现电机的旋转。
2. 双相控制:将步进电机绕组分为A、B两相,通过改变A、B两相的通电顺序,实现电机的旋转。
3. 四相控制:将步进电机绕组分为A、B、C、D四相,通过改变A、B、C、D四相的通电顺序,实现电机的旋转。
三、实验设备1. 微机:一台2. 步进电机驱动器:一台3. 步进电机:一台4. 编程软件:例如Keil、IAR等5. 连接线:若干四、实验内容1. 步进电机基本特性测试(1)观察步进电机在不同脉冲频率下的转动情况。
(2)观察步进电机在不同脉冲数下的转动角度。
2. 步进电机单相控制(1)编写程序,实现步进电机单相控制。
(2)测试步进电机单相控制下的转动情况。
3. 步进电机双相控制(1)编写程序,实现步进电机双相控制。
(2)测试步进电机双相控制下的转动情况。
4. 步进电机四相控制(1)编写程序,实现步进电机四相控制。
(2)测试步进电机四相控制下的转动情况。
5. 步进电机转速控制(1)编写程序,实现步进电机转速控制。
(2)测试步进电机在不同转速下的转动情况。
6. 步进电机转向控制(1)编写程序,实现步进电机转向控制。
(2)测试步进电机正转和反转的情况。
五、实验步骤1. 连接步进电机驱动器和步进电机。
2. 在微机上编写程序,实现步进电机的基本控制。
3. 编写程序,实现步进电机单相、双相、四相控制。
4. 编写程序,实现步进电机转速和转向控制。
5. 运行程序,观察步进电机的转动情况。
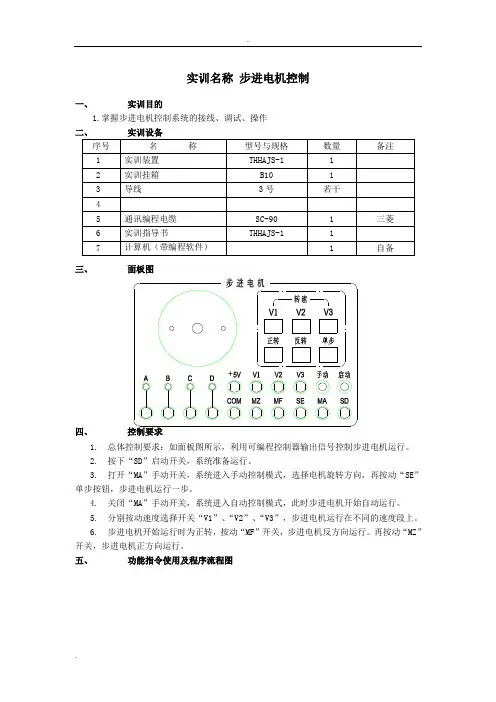
实训名称步进电机控制一、实训目的1.掌握步进电机控制系统的接线、调试、操作二、实训设备序号名称型号与规格数量备注1实训装置THHAJS-1 12实训挂箱B10 13导线3号若干45通讯编程电缆SC-90 1 三菱6实训指导书THHAJS-1 17计算机(带编程软件) 1 自备三、面板图+四、控制要求1.总体控制要求:如面板图所示,利用可编程控制器输出信号控制步进电机运行。
2.按下“SD”启动开关,系统准备运行。
3.打开“MA”手动开关,系统进入手动控制模式,选择电机旋转方向,再按动“SE”单步按钮,步进电机运行一步。
4.关闭“MA”手动开关,系统进入自动控制模式,此时步进电机开始自动运行。
5.分别按动速度选择开关“V1”、“V2”、“V3”,步进电机运行在不同的速度段上。
6.步进电机开始运行时为正转,按动“MF”开关,步进电机反方向运行。
再按动“MZ”开关,步进电机正方向运行。
五、功能指令使用及程序流程图六、端口分配及接线图1.端口分配及功能表 序号 PLC 地址(PLC 端子)电气符号(面板端子) 功能说明1 X00 SD 启动开关2 X01 MA 手动3 X02 V1 速度14 X03 V2 速度25 X04 V3 速度36 X05 MZ 正转7 X06 MF 反转8 X07 SE 单步 9Y00 A A 相 10 Y01 B B 相 11 Y02 C C 相 12 Y03DD 相 13 面板V+ 接电源+24V电源正端 14主机COM 、COM0、COM1、COM2接电源GND电源负端2.PLC 外部接线图七、操作步骤1. 检查实训设备中器材及调试程序。
2.按照I/O端口分配表或接线图完成PLC与实训模块之间的接线,认真检查,确保正确无误。
2.打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-90通讯编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP”开关拨至“RUN”状态。
步进电机程序控制步进电机是自动控制系统中常用的执行部件。
步进电机的输入信号为脉冲电流,它能将输入的脉冲信号转换为阶跃型的角位移或直线位移,因而步进电机可看作是一个串行的数/模转换器。
由于步进电机能够直接接受数字信号,而不需数/模转换,所以使用微机控制步进电机显得非常方便。
步进电机有以下优点:∙通常不需要反馈就能对位置和速度进行控制;∙位置误差不会积累;∙与数组设备兼容,能够直接接收数字信号;∙可以快速启停。
步进电机的品种规格很多,按照它们的结构和工作原理可以划分为磁阻式(也称反应式或变磁阻式)电机、混合式电机、永磁式电机和特种电机等四种主要型式。
步进电机不需位移传感器就可精确定位,所以在精确定位系统中应用广泛。
目前打字机、计算机外部设备、数控机床、传真机等设备中都使用了步进电机。
随着电子计算机技术的发展,步进电机必将发挥它的控制方便、控制准确的特点,在工业控制等领域取得更为广泛的应用。
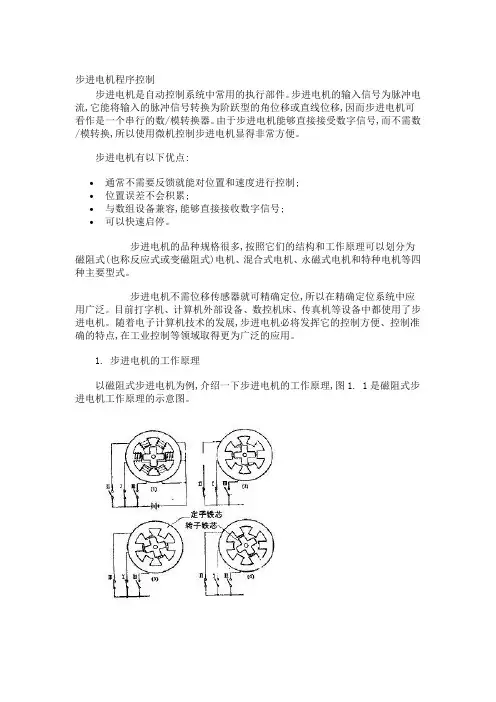
1. 步进电机的工作原理以磁阻式步进电机为例,介绍一下步进电机的工作原理,图1. 1是磁阻式步进电机工作原理的示意图。
图1. 1 磁阻式步进电机的工作原理它的定子上有六个极,转子有四个极。
定子磁极上绕有三组绕组,每组绕组由相互串联的两个线圈构成。
一组绕组叫做一相。
因此,图1. 1所示的电机为三相步进电机。
直流电源通过开关I、Ⅱ和Ⅲ,驱动电流流过绕在定子上的绕组。
状态(1) ,开关I闭合,A相通电。
由于A相绕组受到激磁,空气隙里出现如箭头所示的磁场。
A相上的两个定子磁极和两个转子齿对准,转子处于平衡状态。
若再闭合开关R激励B相,如状态(2)所示, B相的定子磁极以同样的方式产生磁场。
在磁力线的张力作用下,产生逆时针方向的转矩。
于是,转子沿逆时针方向转过一个固定的角度,到达状态(3) 。
图中,转过的角度为15°。
如果现在打开开关I,去掉A相的激磁,转子将再转15°,到达状态(4) 。
因此,转子的角位置可以用这种开关方式进行控制。
步进电机的原理及控制方法步进电机是一种常见的电机类型,具有精准定位、简单控制等优点,在许多应用领域得到广泛应用。
本文将介绍步进电机的工作原理以及常见的控制方法。
1. 工作原理步进电机是一种将电脉冲信号转换为机械位移的电机。
其工作原理基于磁场相互作用,根据电磁学原理可分为单相和双相两种类型。
1.1 单相步进电机单相步进电机由定子和转子两部分组成,定子上绕有线圈,通电时产生磁场。
转子上装有磁性材料,根据两者之间磁场相互作用来实现旋转。
1.2 双相步进电机双相步进电机比单相步进电机更常见,其定子上有两组线圈,通电时可以产生不同方向的磁场,从而实现精确的步进运动。
2. 控制方法步进电机的控制方法主要包括开环控制和闭环控制两种。
2.1 开环控制开环控制是指通过给步进电机提供一定频率和脉冲数的信号来实现旋转运动,但无法保证绝对的位置精准度。
这种方法简单易实现,适用于一些对位置要求不高的应用场景。
2.2 闭环控制闭环控制通过在步进电机系统中加入位置反馈传感器,实时监测电机位置并与设定位置进行比较,从而调整控制信号以实现精确的位置控制。
闭环控制能够提高系统的稳定性和精度,适用于对位置要求较高的应用。
3. 应用领域步进电机在许多领域得到广泛应用,如打印设备、数控机床、医疗设备等。
其精准性和简单控制特点使其成为自动化设备中重要的驱动元件。
结语步进电机作为一种重要的电机类型,具有独特的工作原理和控制方法,为许多自动化设备的驱动提供了可靠保障。
通过深入了解步进电机的原理和控制方法,可以更好地应用于实际场景中,发挥其优势,实现精准的位置控制和运动控制。
步进电机的控制原理及应用引言步进电机是一种常见的电动机,具有精准定位、高速运动和高力矩输出的特点,在工业自动化、机器人技术、医疗器械等领域广泛应用。
本文将介绍步进电机的控制原理和应用。
步进电机控制原理步进电机是一种以固定角度步进运动的电动机,通过电流的施加和极性的反转来实现转子的精确位置控制。
其控制原理主要包括以下几点:1.步进角度:步进电机每次转动的角度是固定的,通常为1.8度或0.9度。
这是由电机内部的磁极分布决定的。
2.极数:步进电机的极数决定了每转动一周所需的电脉冲数。
极数越高,分辨率越高,但也增加了控制的复杂性。
3.电流驱动:步进电机通常需要使用驱动器来提供足够的电流。
驱动器根据输入的脉冲信号来控制电机的转动。
4.脉冲信号:步进电机的控制信号是一系列的脉冲信号,每个脉冲信号引发电机转动一个步进角度。
脉冲信号的频率和方向决定了电机的运动速度和方向。
步进电机的应用步进电机由于其独特的控制方式和优越的性能,在许多领域得到广泛应用。
以下是步进电机的几个主要应用领域:1.机床和自动化设备:步进电机被广泛用于机床和自动化设备中,如数控机床、自动包装机等。
其精确的定位和高速运动能力使其成为自动化生产线中不可或缺的一部分。
2.机器人技术:步进电机在机器人技术中扮演着重要角色。
机器人需要精准的定位和精确的运动控制,步进电机正好满足需求。
步进电机广泛应用于机器人臂、机器人关节和机器人末端执行器等部分。
3.医疗器械:步进电机在医疗器械领域的应用也很广泛,如医疗机器人、手术器械等。
步进电机的高精度定位和稳定性能保证了医疗器械的安全和可靠性。
4.3D打印机:步进电机在3D打印机中是关键组件之一。
通过控制步进电机的运动,可以实现精确的3D打印效果。
步进电机的精准定位能力保证了打印的精度和准确性。
5.汽车行业:步进电机广泛应用于汽车行业中的汽车座椅调节、车窗升降、车内电子设备控制等方面。
步进电机的高力矩和精确控制保证了相关设备的可靠性和稳定性。
步进电机的控制步进电机的控制一.实验目的:了解步进电机控制的基本原理。
掌握控制步进电机转动的编程方法二.步进电机工作原理步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。
步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。
正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
由于步进电动机能直接接受数字量的控制,所以特别适宜采用微机进行控制。
1.步进电动机的种类目前常用的有三种步进电动机:(1)反应式步进电动机(VR):反应式步进电动机结构简单,生产成本低,步距角小;但动态性能差。
(2)永磁式步进电动机(PM):永磁式步进电动机出力大,动态性能好;但步距角大。
(3)混合式步进电动机(HB):混合式步进电动机综合了反应式、永磁式步进电动机两者的优点,它的步距角小,出力大,动态性能好,是目前性能最高的步进电动机。
它有时也称作永磁感应子式步进电动机。
2.步进电机主要性能指标:A,启动转矩:从一个齿位转到下一个齿位的转矩B,保持转矩:指步进电机在静止状态保持该平衡位置的能力。
C,加速转矩:指电机转动的动力。
3.步进电机结构及工作原理如下图:绕组(A,B,C,D)被安装在定子(机壳)上,定子的电极加上电压后,转子将被定子上相反的磁极相吸引而转动。
转子由大量的永磁体组成。
当定子上的绕组通上电流后,这些永磁体将趋向于和绕组对准成一条直线。
转子上突出的磁极称为齿。
步进电机有两种类型:双极性(两相步进电机)和单极性(四相步进电机)。
我们实验所用的是5线单极性步进电机,它有四对绕组分布在机壳上,其线圈两端电压方向不变。
下图是我们所使用的5线单极性步进电机的内部绕组图其中,com端(公共线)接5V电压,A,B,C,D分别连到电机的四相。
由上图可知,四相步进电机有三种步进方式:单拍,双拍,半拍。
①单拍:每次仅给一个绕组通电,结果导致转子旋转,并运动到转子永磁体与具有相反极性的绕组对齐的位置。