第一章:概述
直流电动机是人类发明最早和应用的一种电机。与交流电机相比,直流电机因结构复、维护苦难,价格昂贵等缺点制约了它的发展,应用不及交流电机广泛。但由于直流电动机具有优良的启动、调速和制动性能,因此在工业领域中仍占有一席之地。
转速调节的主要技术指标是:调速范围D和负载变化时对转速的影响即静差率,以及调速时的允许负载性质等(静差率就是表示在负载变化时拖动装置转速降落的程度。静差率越小,表示转速稳定性越好,对生产机械,如机床加工的零件,其加工的精度及表面光洁度就越高)。而直流电动机的突出优点是恰好是能在很大的范围内具有平滑,平稳的调速性能,过载能力较强,热动和制动转矩较大。
因此,从可靠性来看,直流电动机仍有一定的优势。
调节直流电动机转速的方法有三种:
(1)电枢回路串电阻;
(2)改变励磁电流;
(3)改变电枢回路的电源电压;
而本文从另一个角度来阐述直流电机的速度控制,即利用自动控制中的反馈来调节电机的平稳运行以达到各项性能指标。
第二章:系统数学模型
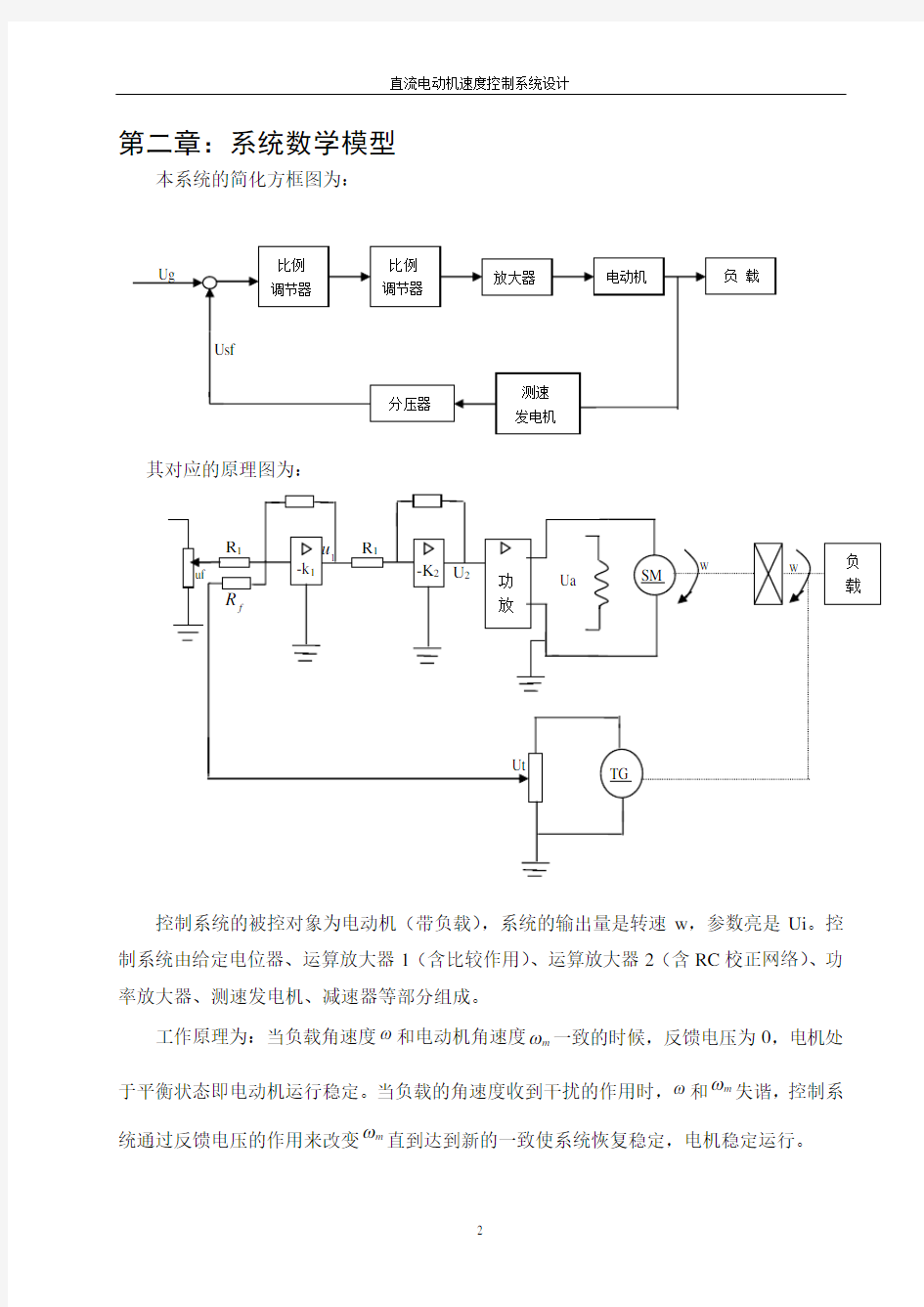
本系统的简化方框图为:
其对应的原理图为:
控制系统的被控对象为电动机(带负载),系统的输出量是转速w ,参数亮是Ui 。控制系统由给定电位器、运算放大器1(含比较作用)、运算放大器2(含RC 校正网络)、功率放大器、测速发电机、减速器等部分组成。
工作原理为:当负载角速度ω和电动机角速度m ω一致的时候,反馈电压为0,电机处于平衡状态即电动机运行稳定。当负载的角速度收到干扰的作用时,ω和m ω失谐,控制系统通过反馈电压的作用来改变m ω直到达到新的一致使系统恢复稳定,电机稳定运行。
2.1直流电动机的数学模型:
直流电动机的数学模型。直流电动机可以在较宽的速度范围和负载范围内得到连续和准确地控制,因此在控制工程中应用非常广泛。直流电动机产生的力矩与磁通和电枢电流成正比,通过改变电枢电流或改变激磁电流都可以对电流电机的力矩和转速进行控制。图2.2是一个电枢控制式直流电动机的原理图。在这种控制方式中,激磁电流恒定,控制电压加在电枢上,这是一种普遍采用的控制方式。
设为输入的控制电压
电枢电流
为电机产生的主动力矩
为电机轴的角速度
为电机的电感
为电枢导数的电阻
为电枢转动中产生的反电势
为电机和负载的转动惯量
根据电路的克希霍夫定理
(2-1)
电机的主动转矩
(2-2)
其中为电机的力矩常数。
反电势
(2-3)
式中为电机反电势比例系数
力矩平衡方程
(2-4)
消去中间变量,,后得到
(2-5)
整理后
(2-6)
式中:称为直流电动机的电气时间常数;称为直流电动机的机电时间常数;
,为比例系数。
直流电动机电枢绕组的电感比较小,一般情况下可以忽略不计,式(2-6)可简化为
(2-7)
图2.1 直流电动机
忽略Mr扰动后,则直流电动机微分方程为
经拉斯变后得:
1
1
)(+=
S T K G m s
所以直流电动机就等效为以个惯性环节,即:
2.2测速发电机数学模型
测速发电机的输出电压i u 和转速ω成正比,即有
i u = K t ω
式中K t 是测速发电机比例系数,经拉斯变换为一比例环节:
2.3功率放大器数学模型
常用的直流功率放大器有集成功率放大器、PWM 功率放大器、晶闸管功率放大器三种。 其中PWM 是一个电压脉冲变换装置,其PWM 波形信号经功率放大输出以驱动直流电机,实现调速控制。在采用PWM 控制的系统中,由于开关频率远大于电机频率,靠电枢的滤波作用,脉冲交流并不会对直流电机造成影像。PWM 还有独特的“动力润滑作用”使电机的低速平滑换向性好。
当使用PWM 功放时候,它可以等效为一个惯性环节,即:
2.4系统传递函数
两个比例放大器均可等效为比例环节,因此此控制系统经等效后结构框图为:
由此可得此系统的闭环传递函数为
()1
32132
3321)(++++=
m m m m
s K K K K S T T S T T K K K K G 经忽略和简化后可得
K
S TS K
G s ++=
2
)( 其中m m T T T T T +=
33 , 3
321T T K
K K K K m m +=
第三章:系统性能分析
经过对一般电机和控制系统的研究取K=2,T=0.6s. 系统的单位阶跃响应表达式及动态性能指标及。
结论
通过本次设计,对直流电动机和反馈控制有了更深的了解和掌握。本此设计的重点之一就是抽象数学模型,求出传递函数,求出系统的传递函数以后,关于系统各种性能的分析就相对简单一些,但是系统的各项指标是判断系统控制好坏的重要标准,因此性能分析不能小视!通过对系统性能的分析以后,根据对系统性能的要求,在原系统的基础之上进行校正。
通过各种分析和适当的校正,系统满足了对其提出的要求,就能平稳的工作,很好地执行电机的各种功能。
设计体会
在本次的设计中,感受最深的就是理论和实际的区别,本以为自控学的还可以,设计就不会太难,但是设计开始之后,就感到了知识的肤浅,要想做一个好设计必须对知识有深刻的理解和准确的把握。
虽然完成了课程设计,但我认为存在许多不足。我觉得在以后的学习中应注意理论和实际的联系。
在以后的学习中要做到:
1.认真阅读与钻研参考资料。。
2.系统学习和重点深入相结合。在全面系统学习教材的基础上,对重点知识点进行深入的学习,掌握重要原理和概念,以便更好地把握本课程的全部内。
3. 重视理论联系实际,提高分析问题、解决问题的能力。
4. 保证必要的学习时间。根据本课程特点和自身的实际情况,合理设计内容和自学
时间。
参考文献
[1]胡寿松.自动控制原理. 科学出版社2001 2
[2]易继锴,现代控制系统设计,北京工业大学出版社1992 3
[3]李友善.自动控制原理. 国防工业出版社2003
[4]刘修文.实用电子电路图解中国电力出版社2006
实训题目: 温度控制直流电动机转速 学生姓名:崔敬通 学号: 201223160126 专业:电子信息工程 2013年11月27日
1 引言 直流电机具有良好的线性调速特性和控制性能,使其调速控制占主流地位。尽管交流变频电机、步进电机等在控制调速领域的应用比较广泛,但直流电机调速仍是大多数调速控制电机的最佳选择。89C55单片机支持C语言编程,可移植性好,速度快,已被广泛应用于机电一体化、工业控制、智能仪器仪表等领域。现应用89C51单片机对直流电机速度进行有效测试和控制,通过对直流电机转速脉冲和中断次数的计数,可实现根据输入值控制直流电机的转速。 2 设计任务与要求 根据设计需要,通过测量原件把检测到的直流电机转速读入到89C55单片机中,再通过编程使读入的数值在显示器上显示出来。若检测到的电机转速等于设定值,则对直流电机的转速进行记录;若检测到的电机转速没有达到设定值,则通过加大数值或模数转换芯片使电机速度提升至设定值;若检测到电机转速超过设定值则通过模数转换芯片把电机速度降至设定值。通过这种实时检测和在线控制的方式使单片机能够对直流电机 2.1系统的设计要求及主要技术指标 本论文要求使用单片机进行电路设计,同时单片机部分应带有显示功能。单片机对某个位置进行温度监控,当外部温度≥45℃时,电动机加速正转,当温度≥75℃时,电动机全速正转;当外部温度≤10℃时,电动机加速反转,当温度≤0℃时,电动机全速反转;当温度回到10℃~45℃之间时电动机逐渐停止转动。 2.2系统总体方案 系统总体方案设计,如下图2.1
图2.1 系统总体方案图 2.3总体方案论述 该系统采用AT89C55单片机为核心,通过DS18B20进行温度采集,送入单片机,经过软件编程进行温度的比较和范围划定,然后通过程序控制由单片机产生不同的PWM(脉冲宽度调制)信号,送给电机驱动芯片L298的使能端口,通过L298驱动芯片来控制直流电机的启动、速度、方向的变化;单片机将温度数据传送给LM016L显示温度。整个电路设计包括温度采集模块,单片机控制模块,温度显示模块,和电机及电机驱动模块。 3硬件电路设计 MCS-51系列单片机 Intel公司推出的8位单片机: 1976年推出的MCS-48系列:8039,8048等。
专业资料 电机简要学习手册 2015-2-3
一、直流电机原理与控制方法 1直流电机简介 直流电机(DM)是指能将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能 (直流发电机)的旋转电机。 它是能实现直流电能和机械 能互相转换的电机。当它作电 动机运行时是直流电动机,将 电能转换为机械能;作发电机 运行时是直流发电机,将机械 能转换为电能。 直流电机由转子(电枢)、定子(励磁绕组或者永磁体)、换向器、电刷等部分构成,以其良好的调速性能以至于在矢量控制出现以前基本占据了电机控制领域的整座江山。但随着交流电机控制技术的发展,直流电机的弊端也逐渐显现,在很多领域都逐渐被交流电机所取代。但如今直流电机仍然占据着不可忽视的地位,广泛用于对调速要求较高的生产机械上,如轧钢机、电力牵引、挖掘机械、纺织机械,龙门刨床等等,所以对直流电机的了解和研究仍然意义重大。 2 直流电动机基本结构与工作原理 2.1 直流电机结构
如下图,是直流电机结构图,电枢绕组通过换向器流过直流电流与定子绕组磁场发生作用,产生转矩。定子按照励磁可分为直励,他励,复励。电枢产生的磁场会叠加在定子磁场上使得气隙主磁通产生一个偏角,称为电枢反应,通常加补偿绕组使磁通畸变得以修正。 2.2 直流电机工作原理 如图所示给两个电刷加上直流电源,如上图(a)所示,则有直流电流从电刷 A 流入,经过线圈abcd,从电刷 B 流出,根据电磁力定律,载流导体ab和 cd收到电磁力的作用, 其方向可由左手定则判 定,两段导体受到的力 形成了一个转矩,使得 转子逆时针转动。如果 转子转到如上图(b)所 示的位置,电刷 A 和换向片2接触,电刷 B 和换向片1接触,直流电流从电刷 A 流入,在线圈中的流动方向是dcba,从电刷 B 流出。 此时载流导体ab和cd受到电磁力的作用方向同样可由左手定
《电力拖动技术课程设计》报告书 直流电动机调速设计 专业:电气自动化 学生姓名: 班级: 09电气自动化大专 指导老师: 提交日期: 2012 年 3 月
前言 在电机的发展史上,直流电动机有着光辉的历史和经历,皮克西、西门子、格拉姆、爱迪生、戈登等世界上著名的科学家都为直流电机的发展和生存作出了极其巨大的贡献,这些直流电机的鼻祖中尤其是以发明擅长的发明大王爱迪生却只对直流电机感兴趣,现而今直流电机仍然成为人类生存和发展极其重要的一部分,因而有必要说明对直流电机的研究很有必要。 早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成,控制系统的硬件部分非常复杂,功能单一,而且系统非常不灵活、调试困难,阻碍了直流电动机控制技术的发展和应用范围的推广。随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。 直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。从控制的角度来看,直流调速还是交流拖动系统的基础。早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成,控制系统的硬件部分非常复杂,功能单一,而且系统非常不灵活、调试困难,阻碍了直流电动机控制技术的发展和应用范围的推广。随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工效率。
煤炭工程学院课程设计 题目:直流电动机转速控制系统 专业班级: 学生姓名: 学号: 指导教师: 日期:
摘要 当今社会,电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。无论是在工农业生产,交通运输,国防,航空航天,医疗卫生,商务和办公设备中,还是在日常生活的家用电器和消费电子产品(如电冰箱,空调,DVD等)中,都大量使用着各种各样的电动机。据资料显示,在所有动力资源中,百分之九十以上来自电动机。同样,我国生产的电能中有百分之六十是用于电动机的。电动机与人的生活息息相关,密不可分。电气时代,电动机的调速控制一般采用模拟法、PID控制等,对电动机的简单控制应用比较多。简单控制是指对电动机进行启动,,制动,正反转控制和顺序控制。这类控制可通过继电器,光耦、可编程控制器和开关元件来实现。还有一类控制叫复杂控制,是指对电动机的转速,转角,转矩,电压,电流,功率等物理量进行控制。 电机在各行各业发挥着重要的作用,而电机转速是电机重要的性能指标之一,因而测量电机的转速和电机的调速,使它满足人们的各种需要,更显得重要,而且随着科技的发展,PWM调速成为电机调速的新方式。 随着数字技术的迅速发展,微控制器在社会的各个领域得到了广泛的应用,由于数字系统有着模拟系统所没有的优势,如抗干扰性强、便于和PC机相联、系统易于升级维护。 本设计是以单片机AT89S52和L298控制的直流电机脉宽调制调速系统。利用AT89S52芯片进行低成本直流电动机控制系统的设计,能够简化系统构成、降低系统成本、增强系统性能、满足更多应用场合的需要。系统实现对电机的正转、反转、急停、加速、减速的控制,以及PWM的占空比在LCD上的实时显示。 关键词:直流电机;AT89S52;PWM调速;L298
直流电动机设计方案 第1章前沿 1.1 课题研究的背景及意义 直流电动机以其良好的起动、制动性能,较宽范围内平滑调速的优点,在许多调速要求较高、要求快速正反向、以蓄电池为电源的电力拖动领域中得到了广泛的应用。近年来,虽然高性能交流调速技术得到了很快的发展,在某些领域交流调速系统已逐步取代直流调速系统。然而直流调速系统系统不仅在理论上和实践上都比较成熟,目前还在应用,比如轧钢机、电气机车等都还有用直流电机;而且从控制规律的角度来看,交流拖动控制系统的控制方式是建立在直流拖动控制系统的基础之上的,从某种意义上说有相似的地方。因此,掌握和了解直流拖动控制系统的控制规律和方法是非常必要的。 从生产机械的要求的角度看,电力拖动控制系统分为调速系统、伺服系统、多电动机同步控制系统、张力控制系统等多种类型。而各种系统大多都是通过控制转速来实现的,因此调速系统是电力拖动控制系统最基本的系统[1]。 从直流电机在国民生产生活中所占位置的角度来看,直流电机目前依旧应用于工业生产中,并广泛应用于人们的生活中。因此直流电机的控制技术的发展很大程度上影响着国民经济的增长,影响着人们的生产生活水平,因此,对直流电机调速系统的研究还是很有必要的。 1.2 课题发展历程及趋势 在很长的一段时间里直流电动机作为最主要的电力拖动工具,其应用已经渗透到人们的工作、学习、生活的各个方面。早期电动机调速控制器主要由模拟器件构成,由于模拟器件存在的固有缺点,比如存在温漂,零漂电压等,使系统控制精度和可靠性降低。后来,随着可编程控制器比如AT89C51,PLC等和IGBT、GTR等电力电子开关器件,传感器技术等的发展使得直流电机调速系统进入了数字控制的阶段,这使得直流电机调速系
直流电动机转速控制 王文玺 (北京交通大学机械与电子控制工程学院,北京) 摘要:通过对直流电动机控制系统的建模,再利用Matlab对建模后的系统进行分析,来加深对自动控制系统的理解。找到系统的输入、输出,理清经历各环节前后的信号变化,找出系统传递函数。 关键词:直流电动机、Matlab、建模、传递函数 1、直流电动机动态数学模型建立 1.1直流电机数字PID闭环速度控制,系统实现无静差控制。 这是一个完整的带PID算法的直流电动机控制系统。目标值为给定的期望值,期望值与被测输出结果形成的反馈做比较,得到误差信号。误差信号经过PID控制环节得到控制信号。继而经历驱动环节得到操作量,驱动量作用与对象即电动机然后得到输出信号即转速。转速通过传感器得到反馈信号。 1.2PID控制环节 1.3被控对象(直流电动机)的统一数学模型 信号类型一次为,输入信号为电压,然后电流、电流、转矩、转速,反馈信号为电压。
各环节的比例函数为: 1.3.1额定励磁条件下,直流电机的电压平衡关系: (Ud为外加电压,E 为感应电势,R a为电枢电阻 ,La为电枢电感,i a为电枢电流。) 拉氏变换后: (ra—L /R ,为电枢时间常数) 1.3.2直流电机的转矩平衡关系及拉氏变换: (Te 为电磁转矩,Tl 为负载转矩,B为 阻尼系数,J 为转动惯量,w为电机机 械转速,rm=J/B,为机械时间常数) 1.3.3电动机传递函数 可见直流电动机本身就是一个闭环系统,假设电机工作在空载状态,且机械时间常数远大于电枢时间常数,则电机传递函数可近似为: 1.4具体实例 电枢控制直流电动机拖动惯性负载的原理图,涉及的参数有:电压U为输入,转速为输出,R、L为电枢回路电阻、电感,K 是电动机转矩系数,K 是反电动势系数,K 是电动机和负载折合到电动机轴上的黏性摩擦系数,.厂是电动机和负载折合到电动机轴上的转动惯量。已知:R一2.0 Q,L:==0.5 H ,K = Kb一0.015,Kf一0.2 Nms,J— o.02kg.m 。 ( 取电压U为输入,转速叫为输出,由已知条件和原理图,根据直流电机的运动方程可以求出电动机系统的数学模型为:
电机简要学习手册 2015-2-3
一、直流电机原理与控制方法 1直流电机简介 直流电机(DM)是指能将 直流电能转换成机械能(直流 电动机)或将机械能转换成直 流电能(直流发电机)的旋转 电机。它是能实现直流电能和机械能互相转换的电机。当它作电动机运行时是直流电动机,将电能转换为机械能;作发电机运行时是直流发电机,将机械能转换为电能。 直流电机由转子(电枢)、定子(励磁绕组或者永磁体)、换向器、电刷等部分构成,以其良好的调速性能以至于在矢量控制出现以前基本占据了电机控制领域的整座江山。但随着交流电机控制技术的发展,直流电机的弊端也逐渐显现,在很多领域都逐渐被交流电机所取代。但如今直流电机仍然占据着不可忽视的地位,广泛用于对调速要求较高的生产机械上,如轧钢机、电力牵引、挖掘机械、纺织机械,龙门刨床等等,所以对直流电机的了解和研究仍然意义重大。
2 直流电动机基本结构与工作原理 2.1 直流电机结构 如下图,是直流电机结构图,电枢绕组通过换向器流过直流电流与定子绕组磁场发生作用,产生转矩。定子按照励磁可分为直励,他励,复励。电枢产生的磁场会叠加在定子磁场上使得气隙主磁通产生一个偏角,称为电枢反应,通常加补偿绕组使磁通畸变得以修正。 2.2 直流电机工作原理 如图所示给两个电刷加上直流电源,如上图(a)所示,则有直流电流从电刷 A 流入,经过线圈abcd,从电刷 B 流出,根据电磁力定律,载流导体ab和 cd收到电磁力的作用, 其方向可由左手定则判 定,两段导体受到的力 形成了一个转矩,使得 转子逆时针转动。如果 转子转到如上图(b)所
示的位置,电刷 A 和换向片2接触,电刷 B 和换向片1接触,直流电流从电刷 A 流入,在线圈中的流动方向是dcba,从电刷 B 流出。 此时载流导体ab和cd受到电磁力的作用方向同样可由左手定则判定,它们产生的转矩仍然使得转子逆时针转动。这就是直流电动机的工作原理。外加的电源是直流的,但由于电刷和换向片的作用,在线圈中流过的电流是交流的,其产生的转矩的方向却是不变的。 发电机的原理则是电机的逆过程:原动机提供转矩,利用法拉第电磁感应产生直流电流。 如下图,比较清晰的说明了直流电动机的原理。 3直流电机重要特性 如下图,更加清晰的揭示了直流电机电流电压与转速转矩之间的关系。 我们可以得到直流电机的四个基本方程:
直流无刷电动机工作原 理控制方法 Document number:PBGCG-0857-BTDO-0089-PTT1998
直流无刷电动机工作原理与控制方法 序言 由于直流无刷电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。 一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。其主要类型有同步电动机、异步电动机和直流电动机三种。由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。 针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的直流无刷电动机。经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为直流无刷电动机的广泛应 用奠定了坚实的基础。 三相直流无刷电动机的基本组成 直流无刷永磁电动机主要由电动机本体、位置传感器和电子开关线路三部分组成。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。图1所示为三相两极直流无刷电机结构, 图1 三相两极直流无刷电机组成 三相定子绕组分别与电子开关线路中相应的功率开关器件联结,A、B、C相绕组分别与功率开关管V1、V2、V3相接。位 置传感器的跟踪转子与电动机转轴相联结。
X X X X X学院 题目:直流电动机控制系统 学 院 XXXXXX学院 专 业 自动化 班 级 XX班 姓 名 XXX 学 号 XXXXX 指导老师 XXX 2012年 12 月 25 日 1、 设计题目:直流电动机控制系统 1、前言 近年来,随着科技的进步,电力电子技术得到了迅速的发展,直流电机得到了越来越广泛的应用。直流它具有优良的调速特性,调速平滑、方便,调速范围广;过载能力大,能承受频繁的冲击负载,可实现频繁的无级快速起动、制动和反转;需要能满足生产过程自动化系统各种不同的特殊运行要求,从而对直流电机的调速提出了较高的要求,改变电枢回路电阻调速,改变电枢电压调速等技术已远远不能满足要求,这时通过PWM方式控制直流电机调速的方法应运而生。 采用传统的调速系统主要有以下缺陷:模拟电路容易随时间漂移,会产生一些不必要的热损耗,以及对噪声敏感等。而在用了PWM技术后,避免了以上的缺陷,实现了用数字方式来控制模拟信号,可以大幅度降低成本和功耗。另外,由于PWM 调速系统的开关频率较高,仅靠电枢电感的滤波作用就可获得平稳的直流电流,低速特性好;同样,由于开
关频率高,快速响应特性好,动态抗干扰能力强,可以获得很宽的频带;开关器件只工作在开关状态,主电路损耗小,装置效率高。PWM 具有很强的抗噪性,且有节约空间、比较经济等特点。 2、系统设计原理 脉宽调制技术是利用数字输出对模拟电路进行控制的一种有效技术,尤其是在对电机的转速控制方面,可大大节省能量,PWM控制技术的理论基础为:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需 要的波形。按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。 直流电动机的转速n和其他参量的关系可表示为 (1) 式中 Ua——电枢供电电压(V); Ia ——电枢电流(A); Ф——励磁磁通(Wb); Ra——电枢回路总电阻(Ω); CE——电势系数, ,p为电磁对数,a为电枢并联支路数,N为导体数。 由式(1)可以看出,式中Ua、Ra、Ф三个参量都可以成为变量,只要改变其中一个参量,就可以改变电动机的转速,所以直流电动机有三种基本调速方法:(1)改变电枢回路总电阻Ra;;(2)改变电枢供电电压Ua;(3)改变励磁磁通Ф。 3、方案选择及论证 3.1、方案选择 3.1.1、改变电枢回路电阻调速 可以通过改变电枢回路电阻来调速,此时转速特性公式为 n=U-【I(R+Rw)】/KeФ (2)式中Rw为电枢回路中的外接电阻(Ω)。 当负载一定时,随着串入的外接电阻Rw的增大,电枢回路总电阻R= (Ra+Rw)增大,电动机转速就降低。Rw的改变可用接触器或主令开关切换来实现。 这种调速方法为有级调速,转速变化率大,轻载下很难得到低速,
直流电动机的PWM调压调速原理 直流电动机转速N的表达式为:N=U-IR/Kφ 由上式可得,直流电动机的转速控制方法可分为两类:调节励磁磁通的励磁控制方法和调节电枢电压的电枢控制方法。其中励磁控制方法在低速时受磁极饱和的限制,在高速时受换向火花和换向器结构强度的限制,并且励磁线圈电感较大,动态响应较差,所以这种控制方法用得很少。现在,大多数应用场合都使用电枢控制方法。 对电动机的驱动离不开半导体功率器件。在对直流电动机电枢电压的控制和驱动中,对半导体器件的使用上又可分为两种方式:线性放大驱动方式和开关驱动方式。 线性放大驱动方式是使半导体功率器件工作在线性区。这种方式的优点是:控制原理简单,输出波动小,线性好,对邻近电路干扰小;但是功率器件在线性区工作时由于产生热量会消耗大部分电功率,效率和散热问题严重,因此这种方式只用于微小功率直流电动机的驱动。绝大多数直流电动机采用开关驱动方式。开关驱动方式是使半导体器件工作在开关状态,通过脉宽调制PWM 来控制电动机电枢电压,实现调速。 在PWM调速时,占空比α是一个重要参数。以下3种方法都可以改变占空比的值。 (1)定宽调频法 这种方法是保持t1不变,只改变t2,这样使周期T(或频率)也随之改变。 (2)调频调宽法 这种方法是保持t2不变,只改变t1,这样使周期T(或频率)也随之改变。 (3)定频调宽法 这种方法是使周期T(或频率)保持不变,而同时改变t1和t2。 前两种方法由于在调速时改变了控制脉冲的周期(或频率),当控制脉冲的频率与系统的固有频率接近时,将会引起振荡,因此这两种方法用得很少。目前,在直流电动机的控制中,主要使用定频调宽法。 直流电动机双极性驱动可逆PWM控制系统 双极性驱动则是指在一个PWM周期里,作为在电枢两端的脉冲电压是正负交替的。 双极性驱动电路有两种,一种称为T型,它由两个开关管组成,采用正负电源,相当于两个不可逆控制系统的组合。但由于T型双极性驱动中的开关管要承受较高的反向电压,因此只用在低压小功率直流电动机驱动。 另一种称为H型。 H型双极性驱动 一、显示接口模块 方案一:液晶显示器也是一种常用的显示器件。它的优点是功耗低,寿命长,本身无老化问题,显示信息量大(可以显示字母和数字),在显示字符上没有限制。但价格高,接口电路较为复杂。其只在一些(袖珍型)设备上作为显示之用。
单片机原理及应用课程设计报告设计题目: 学院: 专业: 班级: 学号: 学生姓名: 指导教师: 年月日 目录
设计题目:PWM直流电机调速系统 本文设计的PWM直流电机调速系统,主要由51单片机、电源、H桥驱动电路、LED 液晶显示器、霍尔测速电路以及独立按键组成的电子产品。电源采用78系列芯片实现+5V、+15V对电机的调速采用PWM波方式,PWM是脉冲宽度调制,通过51单片机改变占空比实现。通过独立按键实现对电机的启停、调速、转向的人工控制,LED实现对测量数据(速度)的显示。电机转速利用霍尔传感器检测输出方波,通过51单片机对1秒内的方波脉冲个数进行计数,计算出电机的速度,实现了直流电机的反馈控制。 关键词:直流电机调速;定时中断;电动机;波形;LED显示器;51单片机 1 设计要求及主要技术指标: 基于MCS-51系列单片机AT89C52,设计一个单片机控制的直流电动机PWM调速控制装置。 设计要求 (1)在系统中扩展直流电动机控制驱动电路L298,驱动直流测速电动机。 (2)使用定时器产生可控的PWM波,通过按键改变PWM占空比,控制直流电动机的转速。 (3)设计一个4个按键的键盘。 K1:“启动/停止”。 K2:“正转/反转”。 K3:“加速”。 K4:“减速”。 (4)手动控制。在键盘上设置两个按键----直流电动机加速和直流电动机减速键。在
手动状态下,每按一次键,电动机的转速按照约定的速率改变。 (5)*测量并在LED显示器上显示电动机转速(rpm). (6)实现数字PID调速功能。 主要技术指标 (1)参考L298说明书,在系统中扩展直流电动机控制驱动电路。 (2)使用定时器产生可控PWM波,定时时间建议为250us。 (3)编写键盘控制程序,实现转向控制,并通过调整PWM波占空比,实现调速; (4)参考Protuse仿真效果图:图(1) 图(1) 2 设计过程 本文设计的直流PWM调速系统采用的是调压调速。系统主电路采用大功率GTR为开关器件、H桥单极式电路为功率放大电路的结构。PWM调制部分是在单片机开发平台之上,运用汇编语言编程控制。由定时器来产生宽度可调的矩形波。通过调节波形的宽度来控制H电路中的GTR通断时间,以达到调节电机速度的目的。增加了系统的灵活性和精确性,使整个PWM脉冲的产生过程得到了大大的简化。 本设计以控制驱动电路L298为核心,L298是SGS公司的产品,内部包含4通道逻辑驱动电路。是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。可驱动2个电机,OUTl、OUT2和OUT3、OUT4之间分别接2个电动机。5、7、10、12脚接输入控制电平,控制电机的正反转,ENA,ENB接控制使能端,控制电机的停转。 本设计以AT89C52单片机为核心,如下图(2),AT89C52是一个低电压,高性能 8位,片内含8k bytes的可反复擦写的只读程序存储器和256 bytes的随机存取数据存储器(),器件采用的高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片内置通用8位中央处理器和Flash存储单元,AT89C52单片机在电子行业中有着广泛的应用。 图(2) 对直流电机转速的控制即可采用开环控制,也可采用闭环控制。与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时, 闭环调速系统的调速范
直流无刷电动机工作原理与控制方法 序言 由于直流无刷电动机既具有交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多优点,故在当今国民经济各领域应用日益普及。 一个多世纪以来,电动机作为机电能量转换装置,其应用范围已遍及国民经济的各个领域以及人们的日常生活中。其主要类型有同步电动机、异步电动机和直流电动机三种。由于传统的直流电动机均采用电刷以机械方法进行换向,因而存在相对的机械摩擦,由此带来了噪声、火化、无线电干扰以及寿命短等弱点,再加上制造成本高及维修困难等缺点,从而大大限制了它的应用范围,致使目前工农业生产上大多数均采用三相异步电动机。 针对上述传统直流电动机的弊病,早在上世纪30年代就有人开始研制以电子换向代替电刷机械换向的直流无刷电动机。经过了几十年的努力,直至上世纪60年代初终于实现了这一愿望。上世纪70年代以来,随着电力电子工业的飞速发展,许多高性能半导体功率器件,如GTR、MOSFET、IGBT、IPM等相继出现,以及高性能永磁材料的问世,均为直流无刷电动机的广泛应用奠定了坚实的基础。 三相直流无刷电动机的基本组成 直流无刷永磁电动机主要由电动机本体、位置传感器和电子开关线路三部分组成。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。图1所示为三相两极直流无刷电机结构, 图1 三相两极直流无刷电机组成 三相定子绕组分别与电子开关线路中相应的功率开关器件联结,A、B、C相绕组分别与功率开关管V1、V2、V3相接。位置传感器的跟踪转子与电动机转轴相联结。 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各项绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 图2为三相直流无刷电动机半控桥电路原理图。此处采用光电器件作为位置传感器,以三只功率晶体管V1、V2和V3构成功率逻辑单元。
直流无刷电动机及其调速控制 1.直流无刷电动机的发展概况与应用 有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。但是,有机械接触电刷-换向器一直是电流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的使用。为了取代有刷直流电动机的机械换向装置,人们进行了长期的探索。早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。 1955年美国的D.Harrison等首次申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,标志着现代无刷直流电动机的诞生。无刷直流电动机的发展在很大程度上取决于电力电子技术的进步,在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时间内,性能都不理想,只能停留在实验室阶段,无法推广使用。1970年以后,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT等)相继问世,加之高磁能积永磁材料(如SmCo、NsFeB)陆续出现,这些均为无刷直流电动机广泛应用奠定了坚实的基础。在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了MAC无刷直流电动机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流系统的热潮,这业标志着无刷直流电动机走向实用阶段。 随着现代永磁材料和相关电子元器件的性能不断提高,价格不断下降,无刷电动机的到了快速发展,并被广泛应用于各个领域,例如,在数控机床、工业机器人以及医疗器械、仪器仪表、化工、轻纺机械和家用电器等小功率场合,计算机的硬盘驱动和软盘驱动器器中的主轴电动机、录像机中的伺服电动机等。 2.直流无刷电动机的基本结构和工作原理 2.1直流无刷电动机的结构 直流无刷电动机的结构 示意图如图2-1所示。 无刷直流电动机由它是 由电动机本体、位置检测器、 逆变器和控制器组成。无刷 直流电动机最初的设计思想 来自普通的有刷直流电动 机,不同的是将直流电动机 的定子、转子位置进行了互 换,其转子为永磁结构,产 生气隙磁通;定子为电枢, 有多相对称绕组。原直流电 图2-1 无刷直流电机机构示意图 动机的电刷和机械换向器被 逆变器和转子位置检测器所代替。所以无刷直流电动机的电机本体实际上是一种
由於直流無刷電動機既具有交流電動機の結構簡單、運行可靠、維護方便等一系列優點,又具備直流電動機の運行效率高、無勵磁損耗以及調速性能好等諸多優點,故在當今國民經濟各領域應用日益普及。 一個多世紀以來,電動機作為機電能量轉換裝置,其應用範圍已遍及國民經濟の各個領域以及人們の日常生活中。其主要類型有同步電動機、異步電動機和直流電動機三種。由於傳統の直流電動機均采用電刷以機械方法進行換向,因而存在相對の機械摩擦,由此帶來了噪聲、火化、無線電幹擾以及壽命短等弱點,再加上制造成本高及維修困難等缺點,從而大大限制了它の應用範圍,致使目前工農業生產上大多數均采用三相異步電動機。 針對上述傳統直流電動機の弊病,早在上世紀30年代就有人開始研制以電子換向代替電刷機械換向の直流無刷電動機。經過了幾十年の努力,直至上世紀60年代初終於實現了這一願望。上世紀70年代以來,隨著電力電子工業の飛速發展,許多高性能半導體功率器件,如GTR、MOSFET、IGBT、IPM等相繼出現,以及高性能永磁材料の問世,均為直流無刷電動機の廣泛應用奠定了堅實の基礎。 三相直流無刷電動機の基本組成 直流無刷永磁電動機主要由電動機本體、位置傳感器和電子開關線路三部分組成。其定子繞組一般制成多相(三相、四相、五相不等),轉子由永久磁鋼按一定極對數(2p=2,4,…)組成。圖1所示為三相兩極直流無刷電機結構, 圖1 三相兩極直流無刷電機組成 三相定子繞組分別與電子開關線路中相應の功率開關器件聯結,A、B、C相繞組分別與功率開關管V1、V2、V3相接。位置傳感器の跟蹤轉子與電動機轉軸相聯結。 當定子繞組の某一相通電時,該電流與轉子永久磁鋼の磁極所產生の磁場相互作用而產生轉矩,驅動轉子旋轉,再由位置傳感器將轉子磁鋼位置變換成電信號,去控制電子開關線
第一章:概述 直流电动机是人类发明最早和应用的一种电机。与交流电机相比,直流电机因结构复、维护苦难,价格昂贵等缺点制约了它的发展,应用不及交流电机广泛。但由于直流电动机具有优良的启动、调速和制动性能,因此在工业领域中仍占有一席之地。 转速调节的主要技术指标是:调速范围D和负载变化时对转速的影响即静差率,以及调速时的允许负载性质等(静差率就是表示在负载变化时拖动装置转速降落的程度。静差率越小,表示转速稳定性越好,对生产机械,如机床加工的零件,其加工的精度及表面光洁度就越高)。而直流电动机的突出优点是恰好是能在很大的范围内具有平滑,平稳的调速性能,过载能力较强,热动和制动转矩较大。 因此,从可靠性来看,直流电动机仍有一定的优势。 调节直流电动机转速的方法有三种: (1)电枢回路串电阻; (2)改变励磁电流; (3)改变电枢回路的电源电压; 而本文从另一个角度来阐述直流电机的速度控制,即利用自动控制中的反馈来调节电机的平稳运行以达到各项性能指标。
第二章:系统数学模型 本系统的简化方框图为: 其对应的原理图为: 控制系统的被控对象为电动机(带负载),系统的输出量是转速w ,参数亮是Ui 。控制系统由给定电位器、运算放大器1(含比较作用)、运算放大器2(含RC 校正网络)、功率放大器、测速发电机、减速器等部分组成。 工作原理为:当负载角速度ω和电动机角速度m ω一致的时候,反馈电压为0,电机处 于平衡状态即电动机运行稳定。当负载的角速度收到干扰的作用时,ω和m ω失谐,控制系统通过反馈电压的作用来改变 m ω直到达到新的一致使系统恢复稳定,电机稳定运行。
2.1直流电动机的数学模型: 直流电动机的数学模型。直流电动机可以在较宽的速度范围和负载范围内得到连续和准确地控制,因此在控制工程中应用非常广泛。直流电动机产生的力矩与磁通和电枢电流成正比,通过改变电枢电流或改变激磁电流都可以对电流电机的力矩和转速进行控制。图2.2是一个电枢控制式直流电动机的原理图。在这种控制方式中,激磁电流恒定,控制电压加在电枢上,这是一种普遍采用的控制方式。 设为输入的控制电压 电枢电流 为电机产生的主动力矩 为电机轴的角速度 为电机的电感 为电枢导数的电阻 为电枢转动中产生的反电势 为电机和负载的转动惯量 根据电路的克希霍夫定理 (2-1) 电机的主动转矩 (2-2) 其中为电机的力矩常数。 反电势 (2-3) 式中为电机反电势比例系数 力矩平衡方程
目录 1 1引言 (1) 2设计任务及要求 (2) 2.1设计目的 (2) 2.2设计要求 (2) 3 本课程设计的意义 (2) 4使用软件介绍 (3) 4.1Proteus仿软真件的介绍 (3) 4.2 Keil软件 (3) 5电路使用元件的介绍 (4) 5.1关于AT89C51单片机的简介 (4) 5.2关于DS18B20温度传感器的简介 (4) 5.3关于L298电机驱动芯片的简介 (4) 5.4关于LM016液晶模块的简介 (5) 6部分硬件的工作原理 (5) 6.1直流电动机的工作原理 (5) 6.2转速的测量原理 (6) 6.3直流电动机的转速控制系统的工作原理 (6) 7直流电动机的转速控制系统软件设计 (7) 7.1编程思路 (7) 7.2系统流程图 (7) 8仿真程序(C语言) (10) 9结束语 (16) 1 1引言 在电气时代的今天,电动机一直在现代化的生产和生活中起着十分重要的作用。据资料统计,现在有的90%以上的动力源自于电动机,电动机和人们的生活
息息相关,密不可分。随着现代化步伐的迈进,人们对自动化的需求越来越高,使电动机控制向更复杂的控制发展。 近年来由于微型机的快速发展,国外交直流系统数字化已经达到实用阶段由于以微处理器为核心的数字控制系统硬件电路的标准化程度高,制作成本低,且不受器件温度漂移的影响,且单片机具有功能强、体积小、可靠性好和价格便宜等优点,现已逐渐成为工厂自动化和各控制领域的支柱之一。其控制软件能够进行逻辑判断和复杂运算,可以实现不同于一般线性调节的最优化、自适应、非线性、智能化等控制规律。所以微机数字控制系统在各个方而的性能都远远优于模拟控制系统且使用越来越广泛。 现在市场上通用的电机控制器大多采用单片机和DSP。但是以前单片机的处理能力有限,对采用复杂的反馈控制的系统,由于需要处理的数据量大,实时性和精度要求高,往往不能满足设计要求。近年来出现了各种单片机,其性能得到了很大提高,价格却比DSP低很多。其相关的软件和开发工具越来越多,功能也越来越强,但价格却在不断降低。现在,越来越多的厂家开始采用单片机来提高产品性价比。 2设计任务及要求 2.1设计目的 设计一个基于温度的电动机转速控制电路,在相应的软件控制下可以完成要求的功能,即外部温度大于45C时,直流电动机在L298驱动下加速正转,温度大于75C全速正转,当外部温度小于10C时电动机加速反转,温度小于0C时电动机全速反转。温度回到10C-45C时电动机停止转动。在液晶显示屏1602LCD上显示当前的温度值。 2.2设计要求 一、设计一个基于温度的电动机转速控制电路,在相应的软件控制下可以完成要求的功能,即外部温度大于45C时,直流电动机在L298驱动下加速正转,温度大于75C全速正转,当外部温度小于10C时电动机加速反转,温度小于0C 时电动机全速反转。温度回到10C-45C时电动机停止转动。在液晶显示屏1602LCD 上显示当前的温度值。 二、画出基于温度的电动机转速控制电路的电路图; 三、所设计的电路需要在仿真软件Protues v7.5上能够运行,课程设计报告的最后必须附有在仿真软件Protues v7.5下设计的电路图和控制程序清单。 3 本课程设计的意义 直流电动机作为一种高效率速度控制电动机引人注目、但市场的知名度还小
毕业论文毕业设计论文 设计(论文)题目:直流电动机PWM控制系统设计 下达日期:2014 年07 月02 日 开始日期:2014 年09 月9 日 完成日期:2014 年月日 指导教师:高文华 学生专业:电气自动化 班级:自动化1207班 学生姓名:ZHAO 教研室主任:王永康 学院:电气工程
陕西工业职业技术学院毕业设计(论文)任务书 一、设计(论文)内容及要求: (一)设计(论文)内容 本设计采用PWM控制技术,利用斩波原理改变脉冲宽度,改变直流电动机两端的直流平均电压的大小,来实现对直流电动机的速度控制。 (二)要求 1.PWM控制器(或单片机)为核心。 2.运用PWM控制器(单片机)为核心,构建控制系统电路。 3.利用PWM控制器(单片机)、大功率开关器件、隔离电路、驱动芯片等硬件,设计建立直流电动机PWM控制系统,力求实用、简单、经济。 4. 保护电路 二、技术指标: 1、采用速度、电流双闭环控制以提高系统控制精度; 2、输出信号稳定,以此来驱动大功率开关器件; 3、控制信号通过PWM控制器(单片机)对功率开关进行控制,使其满足按要求进行速度调节的要求。 4、电动机额定数据为:10kW、220V、55A、1000r/min,电枢电阻Ra为0.5Ω, C e =0.122V·min/r时间常数:T l =0.02s,T m =0.16s。 5、调速范围D=10。 6、稳态指标:无静差。 7、动态指标:电流超调量不大于5%;转速超调量不大于10%。 三、主要参考资料: 1电机控制专用集成电路谭建成主编机械工业出版社 2电气传动的脉宽调制控制技术吴守箴主编机械工业出版社3电力电子技术王兆安黄俊主编机械工业出版社 4电力拖动自动控制系统陈伯时主编机械工业出版社 5自动控制原理与系统孔凡才主编机械工业出版社 6单片机原理与应用王津主编重庆大学出版社
单片机原理及系统课程设计 专业: 班级: 姓名: 学号: 指导教师: ......... 2015年12月27日
基于单片机控制直流电动机 1 引言 通过一个学期的学习,我认为要学好单片机这门课程,不仅要认真学习课本知识,更重要的是要学会通过实践巩固学到的知识,本次课设中我们设计制作的题目是基于单片机的直流电动机的转速检测与PWM调制。 1.1 设计背景 PWM 直流电机应用对市场调查显示,目前各工业各产品都大量用到PWM 调速电机,直流调速电机对市场需求量是相当的大。 1.2直流电机的发展 1834 德国雅可比发明直流发动机1888 南斯拉夫裔美国特斯拉发明了交流电动机1821年英国科学家法拉第首先证明可以把电力转变为旋转运动。最先制成电动机的人,据说是德国的雅可比。他于1834年前后成了一种简单的装置:在两个U型电磁铁中间,装一六臂轮,每臂带两根棒型磁铁。通电后,棒型磁铁与U型磁铁之间产生相互吸引和排斥作用,带动轮轴转动。后来,雅可比做了一具大型的装置。安在小艇上,用320个丹尼尔电池供电,1838年小艇在易北河上首次航行,时速只有2.2公里,与此同时,美国的达文波特也成功地制出了驱动印刷机的电动机。 2 设计方案及原理 2.1 系统设计方案 本次设计用单片机输出PWM 到电机驱动电路H桥,通用按键调节电机的速度。用单片机定时器发生PWM 用按键改变定时初值,可以改变PWM的占空比从而改变速度。
主要研究内容: 1)硬件电路单片机最小系统、H桥驱动电路、按键模块、 2)软件程序用Proteus进行仿真加工,使用C语言编写程序。 2.2H桥原理图 图1H桥电路原理图 2.2.1H桥驱动电路 图2中所示为一个典型的直流电机控制电路。电路得名于“H桥驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图2及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。 如图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左
摘要 当今,自动化控制系统已经在各行各业得到了广泛的应用和发展,而直流驱动控制作为电气传动的主流在现代化生产中起着主要作用。特别是在直流电动机广泛应用的电气传动领域,起到至关重要的作用。直流电动机因为具有良好的调速性能和比较大的起动转矩,一直被应用在电气领域,尤其是在需要调速性能很高的场所。在制造业、工农业自动化、铁路与运输等行业都被广泛的应用,随着市场的竞争力,对直流电动机的需求也越来越高,同时对直流电动机的调速性能也有了更高的要求。因此,研究直流电动机转速控制系统的调速性能有着很重要的意义。 在本次的设计中采用PWM控制直流电动机转速。PWM脉冲受到PID算法的控制,被用来控制直流电动机的转速。同时利用安装在直流电动机转轴上的光电式传感器,将直流电动机的转速转换成脉冲信号,反馈到单片机,形成闭环反馈控制系统,改变不同占空比的PWM脉冲就可以实现直流电动机转速控制。 本论文对每一个方案的选择都进行详细的论述,在软件和硬件部分都进行了模块化。硬件部分首先给出一个以AT89S52单片机为核心的整体结构图,并对驱动电路、显示电路等模块进行详细的阐述。在软件部分给出整体程序流程图,对PWM 程序、PID算法程序、显示程序等模块详细的阐述。本次系统设计的具有抗干扰能力强、性价比高、维修简单方便等优点。 关键词:PWM;单片机;直流电动机;转速控制
Abstract Nowadays, automatic control system has been widely used and greatly developed in all walks of life. As the dominant part of electric drive, direct current (DC) control plays an important role in modern production, especially in the DC motor is widely used in the field of electric transmission. DC motor because of its good speed control performance and relatively large starting torque, has been applied in the electrical field, especially in the high speed performance requirements of the occasion. Is widely used in the manufacturing industry, industry and trade of agricultural automation, rail and transit industry, with the competitiveness of the market, the demand of DC motor is also more and more high, also of the DC motor speed performance also has the higher requirements. Therefore, it is very important to study the speed control performance of the DC motor speed control system. In this design, using PWM control DC motor speed. PWM pulse is controlled by the PID algorithm, PWM is used to control the speed of DC motor. At the same time, the hall sensor mounted on the rotational shaft of the DC motor, the DC motor speed is converted into a pulse signal, feedback to the microcontroller, form a closed loop feedback control system, changing the duty ratio of the PWM pulse can realize DC motor speed control. In this paper, the choice of each program are discussed in detail, in both the software and hardware parts are modular. In the part of hardware, we first give a whole structure diagram with AT89S52 single chip microcomputer as the core, and elaborate the driving circuit, display circuit and other modules in detail. In the software part gives the overall program flow chart, the PWM program, PID algorithm program, display program, and other modules are described in detail. The system design has the advantages of strong anti-interference ability, high cost performance, easy maintenance and so on. Key Words: PWM; microcomputer; DC motor; speed control