
第19卷 第3期2006年6月
传感技术学报
CHIN ES E JOURNAL OF S ENSORS AND ACTUA TORS
Vol.19 No.3J un.2006
N eural N et work PID Control Method and Its Application on Optimization
W U X i ao 2j i ng
(I nf .Tech.&S ci.S chool ,Zhanj iang N ormal College ,Zhanj iang Guang dong 524048,China )
Abstract :Considering t he fact t hat t he initial value of neural network PID controller affected t he system performance ,a neural network PID cont rol met hod based on parameters optimization via modified GA is p resented ,in which parameters of t he PID cont roller are optimized off 2line using GA ,t he result of optimi 2zation is regarded as initial value of p roportion ,integral and differential.The neural network PID control system is devised according to t he above met hod.The experimental result s to level process indicate t hat t he proposed app roach possesses satisfactory stability and robust ness.
K ey w ords :Genetic algorit hm (GA );neural network ;PID cont roller ;level process EEACC :1293
基于改进遗传算法寻优的神经网络PID 控制及应用
伍筱菁
(湛江师范学院信息科技学院,广东湛江524048)
收稿日期:2005210212
作者简介:伍筱菁(19642)女,硕士,高级工程师,研究方向为电气自动化及其应用,ls 2wxj @https://www.doczj.com/doc/f717606716.html,
摘 要:根据神经网络PID 控制器初值的选取影响系统控制性能的特点,提出了一种基于改进遗传算法寻优的神经网络
PID 控制方法。即先利用遗传算法对PID 控制器参数离线寻优,将求出的参数值作为控制器的比例、积分、微分系数的初值,
再进行神经网络PID 控制。对一类液位过程的实时控制结果表明采用本方法的控制系统具有较好的稳定性和鲁棒性。
关键词:遗传算法;神经网络;PID 控制器;液位过程中图分类号:TP273 文献标识码:A 文章编号:100421699(2006)0320865204 作为工业控制应用广泛的控制方法,PID 控制时如何实现参数优化是广泛关注的一个话题[122]。传统的PID 参数优化方法有多种,如单纯形法、专家整定法等。单纯形法对初值较敏感,易陷入局部最优解而造成寻优失败。专家整定法需要太多经验,且整理知识库需要较长时间[3]。遗传算法(Ge 2netic Algorit hm 简称GA )是一种模拟自然界生物进化机制的全局搜索寻优方法,它从许多点开始并行操作,在解空间进行高效启发式搜索,克服了从单点出发的弊端以及搜索的盲目性,使寻优速度更快,是PID 参数整定与优化的一种行之有效的方法。
近年来,随着人工神经网络理论的发展,人们对基于神经网络的PID 控制方法进行了大量研究[2,425]。文献[5]给出了一种基于DRNN 网络的
PID 自适应控制方案,通过网络学习系统可寻找理
想的k p 、k i 、k d 。但DRNN 网络在学习训练过程中对初值k p (0)、k i (0)、k d (0)比较敏感,当初始值随机赋值时,网络会出现训练速度慢、全局搜索能力弱等不足。为此,本文在文献[5]基础上,采用了先用GA 对PID 控制器参数离线寻优,将求出的参数值作为k p (0)、k i (0)、k d (0),再进行控制的方案,将其应用于双容液位过程控制实验装置,建立了一个基于遗传算法寻优的神经网络PID 实时控制系统。
1 基于改进遗传算法的PID 参数寻优
1.1 改进遗传算法PID 参数寻优过程
简单的遗传算法只使用选择算子、交叉算子和变异算子三种基本遗传算子,其遗传进化操作过程
简单,构成要素包括染色体编码方法、个体适应度评价、选择运算、交叉运算、变异运算和运行参数等。
本文采用自适应交叉、变异的改进遗传算法进行PID 参数寻优。
(1)染色体编码方式
常见的编码方式有二进制编码和实数值编码。采用二进制编码时,编码串过长,且需再解码为实数,存在着量化误差,降低了寻优速度和精度;实数编码是对原参数直接进行遗传操作,具有求解精度高、便于大空间搜索的优点。
若系统有M 个参数需要优化,可将这些参数作为分量构成一个M 维行向量,得到个体的编码为P
=[p 1,p 2,…,p M ];其中P 表示一个个体,p i 是在第i 个参数的参数空间内随机产生的一个分量,M 为所
有待优化参数的数目。本文每个个体有三个分量k p 、k i 、k d ,它们的取值范围确定在0.001~50之间。
(2)适应度函数的计算为获得满意的动态过程,采用误差绝对值时间积分性能指标作为参数选择的最小目标函数。为防止控制量过大,在目标函数中加入控制输入的平方项。另外,为避免超调,采用惩罚函数,一旦超调,将超调量作为最优指标的一项,此时最优指标计算公式为[3]:
J =
∫
∞
(w 1|e (t )|+w 2u 2(t ))d t +w 3t u 当e (t )Ε0
(1)
J =
∫
∞
(w 1|e (t )|+w 2u 2(t )+w 4|e (t )|)d t +w 3t u
当e (t )>0
(2)式中:e (t )为系统误差,u (t )为控制器输出,t u 为上升时间,w 1、w 2、w 3、w 4为权值。
适应度函数取为:
f i =1/J +10
-10
(3)
(3)最优保存策略与选择算子的改进
最优保存策略是将遗传操作后产生的当前代群
体中最高适应度值与上一代群体的最高适应度值作比较,如果当前代最优个体优于上一代,则将其作为当前代的保留个体;否则,就淘汰新一代中的一个个体,并将上一代中具有最高适应度值的个体加入到新一代中。最优保存策略可保证当前的最优个体不会被交叉、变异等遗传运算破坏。
本文采用比例选择算子,即每个个体被选中的概率与其适应度成正比。设f i 为某个体的适应度值,则该个体被选中的概率p s 为:
p s =f i /
∑
j
f j
(4)
为防止适应度值高的个体被淘汰,采用适应度
比例法与最优保留策略进行选择操作,即每代适应度值大的个体可以不经过遗传操作,直接进入下一代,以便更快地寻到最优解。
(4)自适应交叉、变异算法
本文按照文献[6]的方法,进行交叉率P c 和变异率P m 的自适应调整计算:
p c =k 1(f max -f ’c )/(f max -f avg ),f ’c Εf avg
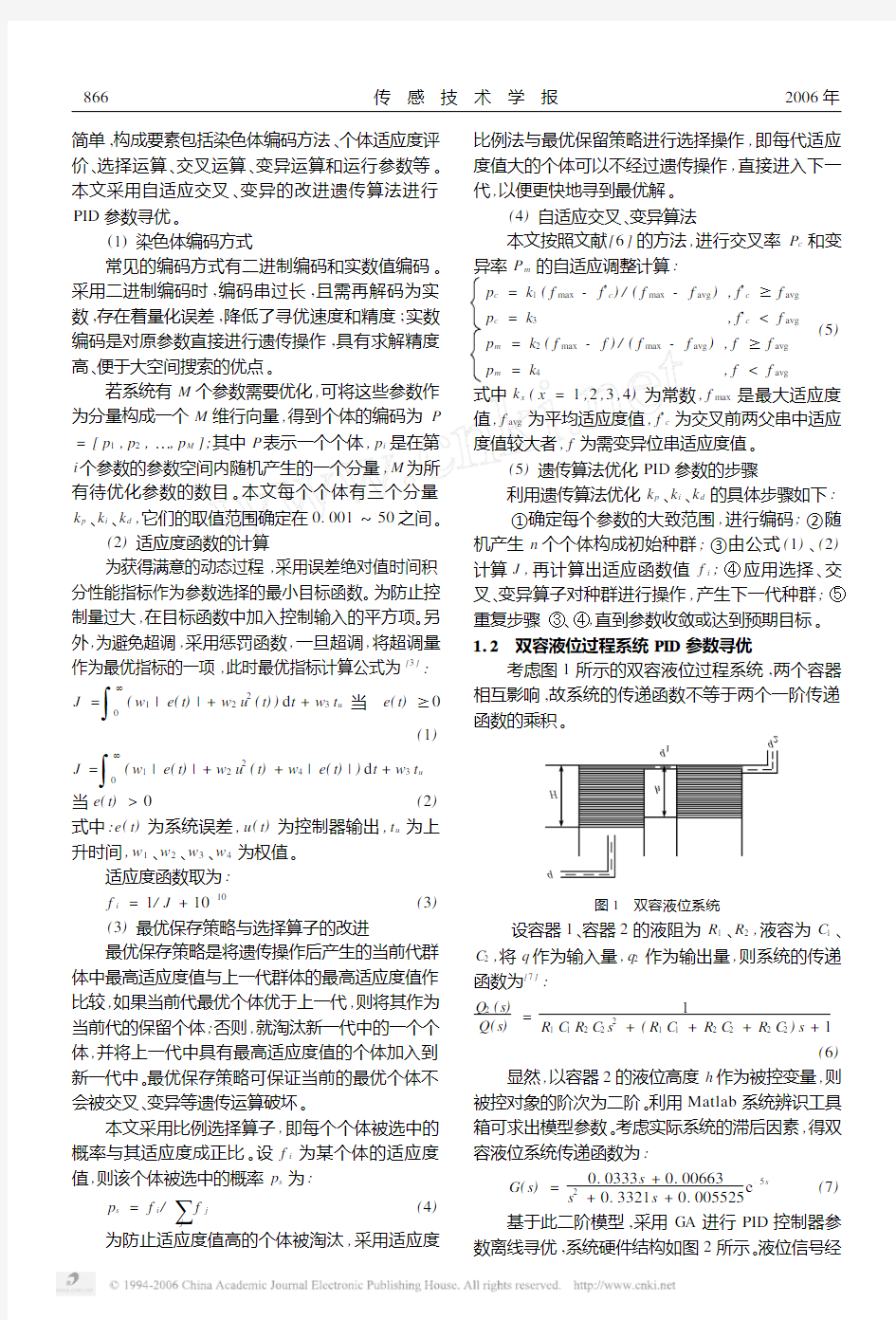
p c =k 3,f ’c =k 2(f max -f )/(f max -f avg ),f Εf avg p m =k 4 ,f (5) 式中k x (x =1,2,3,4)为常数,f max 是最大适应度值,f avg 为平均适应度值,f ’c 为交叉前两父串中适应度值较大者,f 为需变异位串适应度值。 (5)遗传算法优化PID 参数的步骤利用遗传算法优化k p 、k i 、k d 的具体步骤如下:①确定每个参数的大致范围,进行编码;②随 机产生n 个个体构成初始种群;③由公式(1)、 (2)计算J ,再计算出适应函数值f i ;④应用选择、交叉、变异算子对种群进行操作,产生下一代种群;⑤重复步骤③、④,直到参数收敛或达到预期目标。1.2 双容液位过程系统PID 参数寻优 考虑图1所示的双容液位过程系统,两个容器相互影响,故系统的传递函数不等于两个一阶传递函数的乘积。 图1 双容液位系统 设容器1、容器2的液阻为R 1、R 2,液容为C 1、 C 2,将q 作为输入量,q 2作为输出量,则系统的传递 函数为[7]: Q 2(s )Q (s )=1 R 1C 1R 2C 2s 2 +(R 1C 1+R 2C 2+R 2C 2)s +1 (6) 显然,以容器2的液位高度h 作为被控变量,则被控对象的阶次为二阶。利用Matlab 系统辨识工具箱可求出模型参数。考虑实际系统的滞后因素,得双容液位系统传递函数为: G (s )= 0.0333s +0.00663 s 2 +0.3321s +0.005525 e -5s (7) 基于此二阶模型,采用GA 进行PID 控制器参数离线寻优,系统硬件结构如图2所示。液位信号经 668传 感 技 术 学 报2006年 液位传感器、变送器采集4~20mA 电流信号,通过电流.电压转换器转换成电压信号,由PCL812P G 卡经A/D 转换后送计算机。计算机由软件分析计算后给出控制信号,经PCL812P G 卡D/A 转换输出电压信号,通过V /I 转换成4~20mA 的电流信号驱动伺服阀来调节流量大小,最终使液位控制达到期望值 。 图2 双容液位控制系统硬件结构示意图 离线寻优时采样时间取0.5s ,输入指令为阶跃 信号,w 1=0.99,w 2=0.001,w 3=100,w 4=1,k 1=k 3=1,k 2=k 4=0.5,种群大小设为30,进化代数为200,最终得到P 、I 、D 参数初始值为k p 0=4.8,k i 0=0.32,k d 0=0.11。最优指标J 的优化过程和采用PID 控制阶跃响应的曲线如图3、图4所示 。 图3 最优指标J 的优化过程 图4 GA 寻优后的PID 阶跃响应 2 D RNN 网络PID 实时控制 基于GA 寻优的DRNN 网络PID 控制器结构如图5所示。设误差e (k )=r (k )-y (k ),采样周期为T ,则控制器的输出为[5]: u (k )=k p (k )x 1(k )+k i (k )x 2(k )+k d (k )x 3(k )x 1(k )=e (k ) x 2(k )=∑k i =1 (e (k ) ×T ) x 3(k )= e (k )-e (k -1) T (8 ) 图5 基于GA 寻优的DRNN 网络PID 控制器结构图 上式中的系数k p (k )、k i (k )、k d (k )采用DRNN 网络进行整定。DRNN 是一个三层的递归神经网络,无回归元,隐含层均为作用函数是S 型函数的回归元,网络结 构如图6所示[5,8]。设I i (k )为第i 个输入,S j (k )为第j 个回归元的输入和,O (k )为网络的输出,W ij I 、W j D 和 W j O 分别表示输入层、对角回归层和输出层的加权矩 阵,则网络的输入输出映射关系为[8]: O (k )= ∑ j W O j X j (k ) X j (k )=f (S j (k ))S j (k )=W D j X j (k -1)+ ∑ i W ij I I i (k ) (9) 设E (k )= 12 (r (k )-y (k ))2 ,则k p (k )=k p (k -1)+ηp [r (k )-y (k )]x 1(k )(9y/9u )k i (k )=k i (k -1)+ηi [r (k )-y (k )]x 2(k )(9y/9u )k d (k )=k d (k -1)+ηd [r (k )-y (k )]x 3(k )(9y/9u ) (10) 式中9y (k )/9u (k )为输出对输入的灵敏度函数,通过DRNN 网络辨识,辨识指标函数取为: E m (k )= 12(y (k )-y m (k ))2 =12 e m 2(k )(11) 当设计的控制系统稳定时y m (k )y (k ),得到式 (10)中的灵敏度函数: 9y/9u ≈9y m /9u = ∑ j W O j f ’(S j )W ij I (12) 基于DRNN 网络的PID 控制算法计算步骤如下:①DRNN 网络输入层、回归层、输出层权值赋小的随机值,并设定网络各层的学习速率和惯性系数;②将上节GA 优化求出的k p (0)、k i (0)、k d (0)作为PID 控制器的初值,同时给P j (k )、Q ij (k )赋零初值;③计算PID 控制器的输出u (k ),将系统输出 y (k )和u (k )作为网络输入;④对神经网络的权值 7 68第3期伍筱菁:基于改进遗传算法寻优的神经网络PID 控制及应用 进行实时修正;⑤令k =k +1,返回步骤③ 。图6 对角回归神经网络结构图 3 实时控制结果 DRNN 网络结构取为32721,输入I ={u (k ),y (k -1),b I },其中u (k ),y (k -1)均为标么化后的值,b I 是DRNN 的偏置,设为1。初始学习速率均取为0.3, 惯性系数α为0.15,系统采样时间为1s 。图7即为采用本文方法得到的图2中液位h 的实时控制结果。 图7 采用GA 寻优的神经网络PID 液位控制曲线 与文献[5]控制结果相比较,基于遗传算法寻优 的神经网络PID 液位实时控制系统,上升时间短,仅为42s ,超调量小,为0.4cm ,受干扰后恢复平衡时的超调量较小,为0.6cm ,且液位给定改变后的调整时间也较短,系统具有良好的抗干扰能力和动 态性能。 4 结 论 基于DRNN 网络的PID 控制方法,网络学习和训练若无先验知识,会出现训练速度慢,易陷入局部极小等不足。GA 作为全局搜索的寻优方法,可用来进行PID 参数的离线整定和优化,将优化结果作为控制器比例、积分、微分系数初值。实际控制结果也表明,基于遗传算法寻优的神经网络PID 控制系统,具有较强的的自适应能力和鲁棒性能。参考文献: [1] Bennett S.Development of The PID Controller [J ].IEEE Control Systems Magazine ,1993,13(2):58265. [2] 龚菲,王永骥.基于神经网络的PID 参数自整定与实时控制 [J ].华中科技大学学报(自然科学版),2002(10):69271.[3] 刘金琨.先进PID 控制及其MA TLAB 仿真[M ].北京:电子 工业出版社,2003. [4] 王宁.多变量系统的神经元网络智能控制系统.电工技术学 报,1995,2:69273. [5] 王俊国,王永骥,万淑芸.基于动态神经网络的PID 参数整定与 实时控制[J ].系统工程与电子技术,2004,26(6):7772810. [6] 徐丽娜.神经网络控制[M ].北京:电子工业出版社,2002.[7] Kat suhiko Ogata.现代控制工程(第三版)[M ].北京:电子工 业出版社,2000. [8] Ku C C ,Lee K Y.Diagonal Recurrent Neural Networks for Dynamic Systems Control [J ].IEEE Trans.on Neural Net 2works ,1995,6(1):1442155. (上接第853页) 研制的双叠片流体声发射传感器具有较宽的工作频率范围,对切削过程中各种声发射源产生的声发射信号都具有较高的灵敏度,所研制的传感器既能用于对信号能量相对较大的刀具破损声发射信号的检测,也可用于能量相对较小的刀具磨损声发射信号的检测,在刀具磨损在线监测系统中取得了很好的使用效果[10]。参考文献: [1] Kramer B M.A Comprehensive Tool Wear Model.Annals of t he CIRP ,1983,32(2):5632572. [2] Diei E N ,Dornfeld D A.Acoustic Emission from t he Face Milling Process —t he Effect s of Process Variables ,Transac 2tions of t he ASME ,Journal of Engineering for Industry ,1987,109:92299. [3] Dornfeld D A ,Valerie Lisiewicz ,Acoustic Emission Feedback for Precision Deburring ,Annals of CIRP ,1992,41(1):93296. [4] Blum T ,Inasaki I.A Study on Acoustic Emission from t he Ort hogonal Cutting Process ,Transactions of t he ASME ,Journal of Engineering for Industry ,1990,112:2032211.[5] Hutton D V.A Noncontact Acoustic Emission Sensing System for Rotating cutter Machining Processes.Experimental Tech 2niques ,November/December 1991. [6] Wang Zhong 2min ,Wang Xin 2yi ,Chen Ai 2di ,Jia Yu 2ping. Monitoring of Tool Wear States in Turning Based on Wavelet Analysis.Journal of Beijing Institute of Technology.2001,10(1):1012108. [7] 王忠民,王信义,李风华.一种新型谐振式非接触流体声发射 传感器的研制.传感技术学报,2002;15(2):1282131. [8] 贾志福.采用双叠片压电敏感元件的声压梯度水听器.传感 器技术.1997,16(1):22224. [9] 穆廷荣.金属和压电陶瓷构成的双层复合薄圆板的强迫振动. 声学学报,1984,9(5):2982309. [10] 王忠民.自动化加工过程中刀具磨破损智能监测技术研究 [D ].北京:北京理工大学,2000年 868传 感 技 术 学 报2006年 %Single Neural Adaptive PID Controller clear all; close all; x=[0,0,0]'; xiteP=0.40; xiteI=0.35; xiteD=0.40; %Initilizing kp,ki and kd wkp_1=0.10; wki_1=0.10; wkd_1=0.10; %wkp_1=rand; %wki_1=rand; %wkd_1=rand; error_1=0; error_2=0; y_1=0;y_2=0;y_3=0; u_1=0;u_2=0;u_3=0; ts=0.001; for k=1:1:1000 time(k)=k*ts; yd(k)=0.5*sign(sin(2*2*pi*k*ts)); y(k)=0.368*y_1+0.26*y_2+0.1*u_1+0.632*u_2; error(k)=yd(k)-y(k); %Adjusting Weight Value by hebb learning algorithm M=4; if M==1 %No Supervised Heb learning algorithm wkp(k)=wkp_1+xiteP*u_1*x(1); %P wki(k)=wki_1+xiteI*u_1*x(2); %I wkd(k)=wkd_1+xiteD*u_1*x(3); %D K=0.06; elseif M==2 %Supervised Delta learning algorithm wkp(k)=wkp_1+xiteP*error(k)*u_1; %P wki(k)=wki_1+xiteI*error(k)*u_1; %I wkd(k)=wkd_1+xiteD*error(k)*u_1; %D K=0.12; elseif M==3 %Supervised Heb learning algorithm wkp(k)=wkp_1+xiteP*error(k)*u_1*x(1); %P wki(k)=wki_1+xiteI*error(k)*u_1*x(2); %I wkd(k)=wkd_1+xiteD*error(k)*u_1*x(3); %D K=0.12; elseif M==4 %Improved Heb learning algorithm wkp(k)=wkp_1+xiteP*error(k)*u_1*(2*error(k)-error_1); wki(k)=wki_1+xiteI*error(k)*u_1*(2*error(k)-error_1); wkd(k)=wkd_1+xiteD*error(k)*u_1*(2*error(k)-error_1); K=0.12; end x(1)=error(k)-error_1; %P 遗传算法在 BP 神经网络优化中的应用 2O世纪80年代后期,多机器人协作成为一种新的机器人应用形式日益引起国内外学术界的兴趣与关注。一方面,由于任务的复杂性,在单机器人难以完成任务时,人们希望通过多机器人之间的协调与合作来完成。另一方面,人们也希望通过多机器人间的协调与合作,来提高机器人系统在作业过程中的效率。1943年,Maeullocu和 Pitts融合了生物物理学和数学提出了第一个神经元模型。从这以后,人工神经网络经历了发展、停滞、再发展的过程,时至今日正走向成熟,在广泛领域里得到了应用,其中将人工神经网络技术应用到多机器人协作成为新的研究领域。本文研究通过人工神经网络控制多机器人完成协作搬运的任务-3 J,并应用遗传算法来对神经网络进行优化。仿真结果表明,经过遗传算法优化后的搬运工作效率显著提高,误差降低。 1 人工神经网络 ANN)的基本原理和结构 人工神经网络(Artiifcial Neural Network,ANN)) 是抽象、简化与模拟大脑神经结构的计算模型,又称并行分布处理模型 J。ANN 由大量功能简单且具有自适应能力的信息处理单元——人工神经元按照大规模并行的方式通过一定的拓扑结构连接而成。ANN拓扑结构很多,其中采用反向传播(Back-Propa- gation,BP)算法的前馈型神经网络(如下图1所示),即BP人工神经网络,是人工神经网络中最常用、最成熟的神经网络之一。 BP网络模型处理信息的基本原理是:输入信号x;通过中间节点(隐层点 )作用于出节点,经过非线形变换,产生输出信Yk,网络训练的每个样本包括输入向量 x和期望输出量 T,网络输出值Y与期望输出值T之间的偏差,通过调整输入节点与隐层节点的联接强度取值w;;和隐层节点与输出节点之间的联接强度Y以及阈值,使误差沿梯度方向下降,经过反复学习训练,确定与最小误差相对应的网络参数 (权值和阈值),训练即告停止。此时经过训练的神经网络即能对类似样本的输入信息,自行处理输出误差最小的经过非线形转换的信息。 第三章 PID 神经网络结构及控制器的设计 在控制系统中,PID 控制是历史最悠久,生命力最强的控制方式,具有直观、实现简单和鲁棒性能好等一系列优点。但近年来随着计算机的广泛应用,智能控制被越来越广泛的应用到各种控制系统中。智能控制方法以神经元网络为代表,由于神经网络可实现以任意精度逼近任意函数,并具有自学习功能,因此适用于时变、非线性等特性未知的对象,容易弥补常规PID 控制的不足。将常规PID 控制同神经网络相结合是现代控制理论的一个发展趋势。 3.1 常规PID 控制算法和理论基础 3.1.1 模拟PID 控制系统 PID(Proportional 、Integral and Differential)控制是最早发展起来的控制策略之一,它以算法简单、鲁捧性好、可靠性高等优点而梭广泛应用于工业过程控制中。 PID 控制系统结构如图3.1所示: 图3.1 模拟PID 控制系统结构图 它主要由PID 控制器和被控对象所组成。而PID 控制器则由比例、积分、微分三个环节组成。它的数学描述为: 1() ()[()()]t p D i de t u t K e t e d T T dt ττ=+ +? (3.1) 式中,p K 为比例系数; i K 为积分时间常数: d K 为微分时间常数。 简单说来,PID 控制器各校正环节的主要控制作用如下: 1.比例环节即时成比例地反映控制系统的偏差信号()e t ,偏差一旦产生,控制器立即产生控制作用,以减少偏差。 2.积分环节主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 3.微分环节能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。 具体说来,PID 控制器有如下特点: (1)原理简单,实现方便,是一种能够满足大多数实际需要的基本控制器; (2)控制器能适用于多种截然不同的对象,算法在结构上具有较强的鲁棒性,在很多情况下,其控制品质对被控对象的结构和参数摄动不敏感。 3.1.2 数字PID 控制算法 在计算机控制系统中,使用的是数字PID 控制器,数字PID 控制算法通常又分为位置式PID 控制算法和增量式PID 控制算法。 1.位置式PID 控制算法 由于计算机控制是一种采样控制,它只能根据采样时刻的偏差值计算控制量,故对式(3.1)中的积分和微分项不能直接使用,需要进行离散化处理。按模拟PID 控制算法的算式(3.1),现以一系列的采样时刻点kT 代表连续时间t ,以和式代替积分,以增量代替微分,则可以作如下的近似变换: t kT = (0,1,2,3...)k = ()()()k k t j j e t dt T e jT T e j ==≈=∑∑? ()()[(1)]()(1) de t e kT e k T e k e k dt T T ----≈= (3.2) 式中,T 表示采样周期。 显然,上述离散化过程中,采样周期T 必须足够短,才能保证有足够的精度。为了书写方便,将()e kT 简化表示()e k 成等,即省去T 。将式(3.2)代入到(3.1)中可以得到离散的PID 表达式为: 0(){()()[()(1)]}k D p j I T T u k K e k e j e k e k T T ==+ + --∑ (3.3) 或 0 ()()()[()(1)]}k p I D j u k K e k K e j K e k e k ==++--∑ (3.4) 式中,k ——采样序号,0,1,2...k =; ()u k ——第k 次采样时刻的计算机输出值; 用遗传算法优化BP神经网络的Matlab编程实例(转) 由于BP网络的权值优化是一个无约束优化问题,而且权值要采用实数编码,所以直接利用Matlab遗传算法工具箱。以下贴出的代码是为一个19输入变量,1个输出变量情况下的非线性回归而设计的,如果要应用于其它情况,只需改动编解码函数即可。 程序一:GA训练BP权值的主函数 function net=GABPNET(XX,YY) %-------------------------------------------------------------------------- % GABPNET.m % 使用遗传算法对BP网络权值阈值进行优化,再用BP算法训练网络 %-------------------------------------------------------------------------- %数据归一化预处理 nntwarn off XX=[1:19;2:20;3:21;4:22]'; YY=[1:4]; XX=premnmx(XX); YY=premnmx(YY); YY %创建网络 net=newff(minmax(XX),[19,25,1],{'tansig','tansig','purelin'},'tra inlm'); %下面使用遗传算法对网络进行优化 P=XX; T=YY; R=size(P,1); S2=size(T,1); S1=25;%隐含层节点数 S=R*S1+S1*S2+S1+S2;%遗传算法编码长度 aa=ones(S,1)*[-1,1]; popu=50;%种群规模 save data2 XX YY % 是将 xx,yy 二个变数的数值存入 data2 这个MAT-file,initPpp=initializega(popu,aa,'gabpEval');%初始化种群 gen=100;%遗传代数 基于径向基函数的神经网络的PID控制器 摘要 RBF神经网络在分类问题中得到了广泛的应用,尤其是模式识别的问题。许多模式识别实验证明,RBF具有更有效的非线性逼近能力,并且RBF神经网络的学习速度较其他网络快。本文在具有复杂控制规律的S函数构造方法的基础上,给出了基于MATLAB语言的RBF神经网络PID控制器,及该模型的一非线性对象的仿真结果。 关键词:S函数;RBF神经网络PID控制器;Simulink仿真模型径向基函数(RBF-Radial Basis Function)神经网络是由J.Moody和C.Darken 在20世纪80年代末提出的一种神经网络,它具有单隐层的三层前馈网络。由于它模拟了人脑中局部调整、相互覆盖接受域(或称野-Receptive Field)的神经网络结构,因此,RBF神经网络是一种局部逼近网络,已证明它能以任意精度逼近任意连续函数。 1.S函数的编写方法 S函数是Simulink中的高级功能模块,Simulink是运行在MATLAB环境下用于建模、仿真和分析动态系统的软件包。只要所研究的系统模型能够由MATLAB语言加以描述,就可构造出相应的S函数,从而借助Simulink中的S 函数功能模块实现MATLAB与Simulink之间的沟通与联系,这样处理可以充分发挥MATLAB编程灵活与Simulink简单直观的各自优势。当系统采用较复杂的控制规律时,Simulink中没有现成功能模块可用,通常都要采用MATLAB编程语言,编写大量复杂而繁琐的源程序代码进行仿真,一是编程复杂、工作量较大,二来也很不直观。如果能利用Simulink提供的S函数来实现这种控制规律,就可以避免原来直接采取编程的方法,不需要编写大量复杂而繁琐的源程序,编程快速、简捷,调试方便,则所要完成的系统仿真工作量会大大减少。 RBF神经网络PID控制器的核心部分的S函数为: function [sys,x0,str,ts]=nnrbf_pid(t,x,u,flag,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0) switch flag, 基于神经网络PID控制算法在多缸电液伺服系统同步控制中的仿真 研究 丁曙光,刘勇 合肥工业大学,合肥,230009 摘要:本文介绍了神经网络控制原理,提出了神经网络PID算法,通过选定三层神经网络作为调节函数,经过Simulink仿真确定了神经网络PID控制器的参数,设计了神经网络PID控制器。推导出多缸液压同步控制系统在各种工况下的传递函数,并把该控制器应用到多缸液压同步控制系统中。经过仿真研究表明该控制器控制效果良好,能满足多缸液压同步的控制要求。 关键词:多缸同步;PID算法;仿真;神经网络 Study on the simulation and appllication of hydraulic servo system of straihtening machine based on Immune Neural network PID control alorithm DING Shu-guang, GUI Gui-sheng,ZHAI Hua Hefei University of Technology, Hefei 23009 Abstract:The principle of immune feedback and immune-neural network PID algorithm was respectively.An immune-neural network PID controller was designed by which an adaline neural network was selected as antibody stay function and parameters of the immune-neural network PID controller were determined by simulation.The transfer function of the hydraulic servo system of crankshaft straightenin on were introduced in different working conditions.The immune-neural network PID controller was applied to hydraulic system of crankshaft straightenin.The simulation and equipment were done,and results show that its control effectiveness is better and can meet the needs of he hydraulic servo-system of crankshaft straightening hydraulic press. Key words:straightening machine; Immune control arithmetic; simulation;neural network 0引言 精密校直液压机(精校机)液压伺服系统是精校机的执行环节,高精度液压位置伺服控制是精校机的关键技术之一,它保证了液压伺服控制系统的控制精度、稳定性和快速性,是完成校直工艺的必要条件。因此,精校机液压伺服控制系统的研究,为精校机产品的设计和制造提供了理论依据,对校直技术和成套设备的开发具有重大的意义[1]。 精校机液压位置伺服系统是一个复杂的系统,具有如下特点:精确模型难建立,要求位置控制精度高、超调量小、响应快、参数易变且难以确定[1]。因此该系统的控制有较大的难度。传统的PID控制虽然简单易行,但参数调整困难,具有明显的滞后特性,PID 控制很难一直保证系统的控制精度,Smith预估补偿 国家重大科技专项资助(项目编号:2009ZX04004-021)安徽省自然科学基金资助(项目编号:090414155)和安徽省科技攻关项目资助(项目编号:06012019A)制方法从理论上为解决时滞系统的控制问题提供了一种有效的方法,但是Smith预估器控制的鲁棒性差,系统性能过分依赖补偿模型的准确性,限制了它在实际过程中的应用[1~5]。 近年来,人们开始将生物系统的许多有益特性应用于各种控制中[1~5],取得了一定成果。自然免疫系统使生物体的一个高度进化、复杂的功能系统,它能自适应地识别和排除侵入肌体的抗原性异物,并且具有学习、记忆和自适应调节功能,以维护肌体内环境的稳定。自然免疫系统非常复杂,但其抵御抗原(antigen)的自适应能力十分显著。生物信息的这种智能特性启发人们利用它来解决一些工程难题,这就引起多种免疫方法的出现。人工免疫系统就是借鉴自然免疫系统自适应、自组织的特性而发展起来的一种智能计算技术。该算法在大量的干扰和不确定环境中都具很强的鲁棒性和自适应性,在控制、优化、模式识别、分类 系统工程理论与实践 Systems Engineering——Theory & Practice 1999年第2期第19卷 vol.19 No.2 1999 遗传算法与神经网络的结合 李敏强徐博艺寇纪淞 摘要阐明了遗传算法和神经网络结合的必要性和可行性,提出用多层前馈神经网络作为遗传搜索的问题表示方式的思想。用遗传算法和神经网络结合的方法求解了短期地震预报问题,设计了用遗传算法训练神经网络权重的新方法,实验结果显示了遗传算法快速学习网络权重的能力,并且能够摆脱局部极点的困扰。 关键词遗传算法进化计算神经网络 On the Combination of Genetic Algorithms and Neural Networks Li Minqiang Xu Boyi Kou Jisong (Institute of Systems Engineering, Tianjin University, Tianjin 300072 Abstract In this paper, we demonstrate the necessity and possibility of combining neural network (NN with GAs. The notion of using multilayered feed forward NN as the representation method of genetic and the searching technique is introduced. We combine GA and NN for solving short term earthquake forecasting problem, design a novel method of using GAs to train connection weights of NN.The empirical test indicates the capability of the new method in fast learning of NN and escaping local optima. Keywords genetic algorithms; evolutionary computation; neural networks 基于神经网络的PID控制 课程名称:智能控制 任课教师: 学生姓名: 学号: 年月日 摘要:本文基于BP神经网络的PID控制方法设计控制器,通过BP神经网络与PID的控制相结合的神经网络控制基本原理和设计来自适应的功能调节PID的的三个参数,并根据被控对象的近似数学模型来输出输入与输出并分析BP神经网络学习速率η,隐层节点数的选择原则及PID参数对控制效果的影响。计算机的仿真结果表示,基于BP神经网络的PID控制较常规的PID控制具有更好的自适应性,能取得良好的的控制结果。 关键字:BP算法神经网络 PID控制 Abstract:In this paper, based on BP neural network PID control method designed controller, through the BP neural network PID control with a combination of neural network control basic principles and design features adaptively adjusting the PID of the three parameters, and based on the controlled object approximate mathematical model to analyze the output and the input and output BP n eural network learning rate η, hidden layer nodes and PID parameter selection principle effect of the control . Computer simulation results indicated that based on BP neural network PID control compared with conventional PID control has better adaptability , can achieve good control results . Keyword:BP algorithms neural networks PID control 1引言 PID控制是最早发展起来的应用经典控制理论的控制策略之一,由于算法简单,鲁棒性好和可靠性高,被广泛应用于工业过程并取得了良好的控制效果。随着工业的发展,对象的复杂程度不断加深,尤其对于大滞后、时变的、非线性的复杂系统,常规PID控制显得无能为力。因此常规PID控制的应用受到很大的限制和挑战。 神经网络在控制系统中的应用提高了整个系统的信息系统处理能力和适应能力,提高了系统的智能水平。此外,神经网络具有逼近任意连续有界非线性函数的能力,对于非线性系统和不确定性系统,无疑是一种解决问题的有效途径。本文将常规PID控制与神经网络控制相结合,发挥各自的优势,形成所谓的智能PID控制。采用BP神经网络方法设计的控制系统具有更快的速度(实时性)、更强的适应性和更好的鲁棒性。 2 基于BP神经网络的PID控制 PID控制要取得较好的控制结果,必须通过调整好比例、积分和微分三种控制作用,形成控制量中既要相互配合又相互制约的关系。神经网络所具有的任意非线性表达能力,可以通过对系统性能的学习来实现最佳组合的PID控制。采用BP网络,可以建立参数Kp、Ki、Kd自学习的PID控制器。基于BP神经网络的PID控制系统结构由常规的PID控制器和神经网络两个部分构成。 2.1常规的PID控制器 PID控制器由比例(P)、积分(I)、微分(D)3个部分组成,直接对被控对象进行闭环控制,并且三个参数 Kp、Ki、Kd为在线调整方式。 2.2 神经网络 根据系统的运行状态,调节PID控制器的参数,以期达到某种性能指标的最 %读取数据 data=xlsread('data.xls'); %训练预测数据 data_train=data(1:113,:); data_test=data(118:123,:); input_train=data_train(:,1:9)'; output_train=data_train(:,10)'; input_test=data_test(:,1:9)'; output_test=data_test(:,10)'; %数据归一化 [inputn,mininput,maxinput,outputn,minoutput,maxoutput]=premnmx(input_tr ain,output_train); %对p和t进行字标准化预处理 net=newff(minmax(inputn),[10,1],{'tansig','purelin'},'trainlm'); net.trainParam.epochs=100; net.trainParam.lr=0.1; net.trainParam.goal=0.00001; %net.trainParam.show=NaN %网络训练 net=train(net,inputn,outputn); %数据归一化 inputn_test = tramnmx(input_test,mininput,maxinput); an=sim(net,inputn); test_simu=postmnmx(an,minoutput,maxoutput); error=test_simu-output_train; plot(error) k=error./output_train 课程设计作业——翻译 课题:介绍遗传算法神经网络 穆姣姣 0808490233 物流08-班 介绍遗传算法神经网络 理查德·坎普 1. 介绍 一旦一个神经网络模型被创造出来,它常常是可取的。利用这个模型的时候,识别套输入变量导致一个期望输出值。大量的变量和非线性性质的许多材料模型可以使找到一个最优组输入变量变得困难。 在这里,我们可以用遗传算法并试图解决这个问题。 遗传算法是什么?遗传算法是基于搜索algo-rithms力学的自然选择和遗传观察到生物的世界。他们使用两个方向(\适者生存”),在这种条件下,探索一个强劲的功能。重要的是,采用遗传算法,这不是必需要知道功能的形式,就其输出给定的输入(图1)。 健壮性我们这么说是什么意思呢?健壮性是效率和效能之间的平衡所使用的技术在许多不同的环境中。帮助解释这个问题,我们可以比其他搜索和优化技术,如calculus-based,列举,与随机的求索。 方法Calculus-based假设一个光滑,无约束函数和要么找到点在衍生为零(知易行难)或者接受一个方向梯度与当地日当地一所高中点(爬山)。研究了这些技术已经被重点研究、扩展、修改,但展现自己缺乏的鲁棒性是很简单的。 考虑如图2所示的功能。利用Calculus-based在这里发现极值是很容易的(假定派生的函数可以发现…!)。然而,一个更复杂的功能(图3)显示该方法是当地——如果搜索算法,在该地区的一个开始,它就会错过低高峰目标,最高的山峰。 图1 使用网络神经算法没必要知道它的每一项具体功能。 一旦一个局部极大时,进一步改进需要一个随机的重启或类似的东西。同时,假设一个函数光滑,可导,并明确知道很少尊重现实。许多真实世界充满了间断模型和设置在嘈杂的多通道搜索空间(图4)。 虽然calculus-based方法在某些环境中至非常有效的,但内在的假 基于遗传算法的BP神经网络的应用 ----非线性函数拟合 摘要人工神经网络在诸多领域得到应用如信息工程、自动控制、电子技术、目标识别、数学建模、图像处理等领域,并且随着神经网络算啊发的不断改进以及其他新算法的结合,使其应用的领域越来越广。BP神经网络是目前神经网络领域研究最多应用最广的网络,但BP神经网络学习算法易陷入局部极小的缺陷,本文采用遗传算法来优化BP神经网络的性能。首先采用遗传算法来优化BP神经网络的权值和阈值,然后将这些优化值赋给网络得到优化的BP神经网络,最后用MATLAB仿真平台,对非线性函数的逼近拟合和极值寻优问题进行实验。数值仿真结果表明:经遗传算法优化的BP神经网络能有效地避免原始BP神经网络容易出现的局部极小的缺陷,且具有收敛速度快和精度高等优点。 关键词:BP神经网络遗传算法 MATLAB 结构优化 Abstract— In recent years, artificial neural network gradually attention has been paid into the hot area of research in many fields have been involved in electronic applications such as other fields have a wide range of applications, and also continued to expand its applications. To alleviate the shortcoming of easily sinking into the local minimum existing in the BP neural network, the paper exploits the genetic algorithm to optimize the BP neural network. First of all, the genetic algorithm is utilized to optimize the weight values as well as the threshold values of the BP neural network. Subsequently, by using the optimized weight values and threshold values, we are able to get the improved BP neural network. Furthermore, we employ the simulation data to measure the performance of the improved BP neural network. The numerical results indicate that the optimized BP neural network can effectively overcome the local minimum of the original BP neural network and outperform the original BP neural network in the aspects of convergence speed and 5.4 神经网络与遗传算法简介 在本节中,我们将着重讲述一些在网络设计、优化、性能分析、通信路由优化、选择、神经网络控制优化中有重要应用的常用的算法,包括神经网络算法、遗传算法、模拟退火算法等方法。用这些算法可以较容易地解决一些很复杂的,常规算法很难解决的问题。这些算法都有着很深的理论背景,本节不准备详细地讨论这些算法的理论,只对算法的原理和方法作简要的讨论。 5.4.1 神经网络 1. 神经网络的简单原理 人工神经网络(Artificial Neural Networks,简写为ANNs)也简称为神经网络(NNs)或称作连接模型(Connectionist Model),是对人脑或自然神经网络(Natural Neural Network)若干基本特性的抽象和模拟。人工神经网络以对大脑的生理研究成果为基础的,其目的在于模拟大脑的某些机理与机制,实现某个方面的功能。所以说, 人工神经网络是由人工建立的以有向图为拓扑结构的动态系统,它通过对连续或断续的输入作出状态相应而进行信息处理。它是根据人的认识过程而开发出的一种算法。假如我们现在只有一些输入和相应的输出,而对如何由输入得到输出的机理并不清楚,那么我们可以把输入与输出之间的未知过程看成是一个“网络”,通过不断地给这个网络输入和相应的输出来“训练”这个网络,网络根据输入和输出不断地调节自己的各节点之间的权值来满足输入和输出。这样,当训练结束后,我们给定一个输入,网络便会根据自己已调节好的权值计算出一个输出。这就是神经网络的简单原理。 2. 神经元和神经网络的结构 如上所述,神经网络的基本结构如图5.35所示: 隐层隐层2 1 图5.35 神经网络一般都有多层,分为输入层,输出层和隐含层,层数越多,计算结果越精确,但所需的时间也就越长,所以实际应用中要根据要求设计网络层数。神经网络中每一个节点叫做一个人工神经元,他对应于人脑中的神经元。人脑神经元由细胞体、树突和轴突三部分组成,是一种根须状蔓延物。神经元的中心有一闭点,称为细胞体,它能对接受到的信息进行处理,细胞体周围的纤维有两类,轴突是较长的神经纤维,是发出信息的。树突的神经纤维较短,而分支众多,是接收信息的。一个神经元的轴突末端与另一神经元的树突之间密 https://www.doczj.com/doc/f717606716.html,/viewthread.php?tid= 50653&extra=&highlight=%E9%81%97%E4%BC%A0%E7% AE%97%E6%B3%95&page=1 Matlab遗传算法优化神经网络的例子(已调试成功)最近论坛里问到用遗传算法优化神经网络问题的人很多,而且论坛里有很多这方面的代码。但可惜的是所有代码都或多或少有些错误!最郁闷的莫过于只有发帖寻求问题答案的探索者,却很少有对问题进行解答的victor。本人在论坛里看到不少会员对能运行成功的遗传算法优化神经网络例子的需求是多么急切,我也深有感触!现把调试成功的一个例子贴出来,供大家参考!(本例子是基于一篇硕士论文里的代码为蓝本改 编的,此处就不再注明作者了。)遗传算法优化bp.rar (3.34 KB) 注:该代码是由会员“书童”耗费了一整天的时间调试成功的,在此再次对我们的“书童”同学乐于助人的高尚品德致敬,并对其深表感谢!PS:参考会员“ilovexyq”意见,先对其做以补充。该网络为遗传算法 优化bp的一个典型例子,输入为7,输出为7,隐层为25。该网络输入输出数据就是为了说明问题而随便加的,没有实际意义。如用于自己的实际问题,把数据替换并根据需要改一下网络结构就行了。 PS:如有问题,请先阅读此贴: https://www.doczj.com/doc/f717606716.html,/thread-52587-1-1.html### [本帖最后由 yuthreestone 于 2009-10-15 10:52 编辑] 搜索更多相关主题的帖子: 调试例子算法Matlab神经网络 https://www.doczj.com/doc/f717606716.html,/thread-52587-1-1.html 遗传算法优化BP神经网络权值和阈值(完整版) 会员renjia前一段时间分享的程序,地址如下: https://www.doczj.com/doc/f717606716.html,/viewthread.php?tid=50653&extra=&highlight=% E9%81%97%E4%BC%A0%E7%AE%97%E6%B3%95&page=1: (1)renjia提供的程序存在一些小错误,主要是设计的bp网络是两个隐含层,但编码的时候只有一个隐含层。修改后的程序将bp改成了单隐层以确保一致;(2)很多会员不知道该如何运行程序,各个m文件之间的关系弄不清楚。修改后的程序共包含三个m文件: 其中,主程序为ga_bp.m,适应度函数为gabpEval.m,编解码子函数为gadecod.m 注意:使用前需安装gaot工具箱(见附件),上述三个文件需放在同一文件夹中且将该文件夹设置为当前工作路径。 运行程序时只需运行主程序ga_bp.m即可。 (3)此程序仅为示例,针对其他的问题,只需将数据修改即可,但需注意变量名保持一致,尤其是全局变量修改时(在gadecod.m和gabpEval.m中也要修改)(4)gaot工具箱如何安装? 点击file选择set path,在弹出的对话框中选择add folder,将gaot文件夹添加进去,然后点击save保存即可。 MATLAB基于BP神经网络PID控制程序>> %BP based PID Control clear all; close all; xite=0.20; %学习速率 alfa=0.01; %惯性因子 IN=4;H=5;Out=3; %NN Structure wi=[-0.6394 -0.2696 -0.3756 -0.7023; -0.8603 -0.2013 -0.5024 -0.2596; -1.0749 0.5543 -1.6820 -0.5437; -0.3625 -0.0724 -0.6463 -0.2859; 0.1425 0.0279 -0.5406 -0.7660]; %wi=0.50*rands(H,IN); %隐含层加权系数wi初始化 wi_1=wi;wi_2=wi;wi_3=wi; wo=[0.7576 0.2616 0.5820 -0.1416 -0.1325; -0.1146 0.2949 0.8352 0.2205 0.4508; 0.7201 0.4566 0.7672 0.4962 0.3632]; %wo=0.50*rands(Out,H); %输出层加权系数wo初始化 wo_1=wo;wo_2=wo;wo_3=wo; ts=20; %采样周期取值 x=[0,0,0]; %比例,积分,微分赋初值 u_1=0;u_2=0;u_3=0;u_4=0;u_5=0; y_1=0;y_2=0;y_3=0; Oh=zeros(H,1); %Output from NN middle layer 隐含层的输出I=Oh; %Input to NN middle layer 隐含层输入 error_2=0; error_1=0; for k=1:1:500 %仿真开始,共500步 time(k)=k*ts; 中英文对照外文翻译 (文档含英文原文和中文翻译) 基于神经网络和遗传算法的模糊系统的自动设计摘要 本文介绍了基于神经网络和遗传算法的模糊系统的设计,其目的在于缩短开发时间并提高该系统的性能。介绍一种利用神经网络来描绘的多维非线性隶属函数和调整隶属函数参数的方法。还提及了基于遗传算法的集成并自动化三个模糊系统的设计平台。 1 前言 模糊系统往往是人工手动设计。这引起了两个问题:一是由于人工手动设计是费时间的,所以开发费用很高;二是无法保证获得最佳的解决方案。为了缩短开发时间并提高模糊系统的性能,有两种独立的途径:开发支持工具和自动设计方法。前者包括辅助模糊系统设计的开发环境。许多环境已具有商业用途。后者介绍了自动设计的技术。尽管自动设计不能保证获得最优解,他们仍是可取的手工技巧,因为设计是引导走向和依某些标准的最优解。 有三种主要的设计决策模糊控制系统设计: (1)确定模糊规则数, (2)确定隶属度函数的形式。 (3)确定变化参数 再者,必须作出另外两个决定: (4)确定输入变量的数量 (5)确定论证方法 (1)和(2)相互协调确定如何覆盖输入空间。他们之间有高度的相互依赖性。(3)用以确定TSK(Takagi-Sugeno-Kang)模式【1】中的线性方程式的系数,或确定隶属度函数以及部分的Mamdani模型【2】。(4)符合决定最低套相关的输入变量,计算所需的目标决策或控制的价值观。像逆向消除(4)和信息标准的技术在此设计中经常被利用。(5)相当于决定使用哪一个模糊算子和解模糊化的方法。虽然由数种算法和模糊推理的方法已被提出,仍没有选择他们标准。[5]表明动态变化的推理方法,他依据这个推理环境的结果在性能和容错性高于任何固定的推理的方法。 神经网络模型(以更普遍的梯度)和基于遗传算法的神经网络(最常见的梯度的基础)和遗传算法被用于模糊系统的自动设计。基于神经网络的方法主要是用来设计模糊隶属度函数。这有两种主要的方法; (一)直接的多维的模糊隶属度函数的设计: 该方法首先通过数据库确定规则的数目。然后通过每个簇的等级的训练来确定隶属函 神经网络和遗传算法有什么关系? 神经网络的设计要用到遗传算法,遗传算法在神经网络中的应用主要反映在3 个方面:网络的学习,网络的结构设计,网络的分析。 1.遗传算法在网络学习中的应用 在神经网络中,遗传算法可用于网络的学习。这时,它在两个方面起作用 (1)学习规则的优化 用遗传算法对神经网络学习规则实现自动优化,从而提高学习速率。 (2)网络权系数的优化 用遗传算法的全局优化及隐含并行性的特点提高权系数优化速度。 2.遗传算法在网络设计中的应用 用遗传算法设计一个优秀的神经网络结构,首先是要解决网络结构的编码问题;然后才能以选择、交叉、变异操作得出最优结构。编码方法主要有下列3种: (1)直接编码法 这是把神经网络结构直接用二进制串表示,在遗传算法中,“染色体”实质上和神经网络是一种映射关系。通过对“染色体”的优化就实现了对网络的优化。 (2)参数化编码法 参数化编码采用的编码较为抽象,编码包括网络层数、每层神经元数、各层互连方式等信息。一般对进化后的优化“染色体”进行分析,然后产生网络的结构。 (3)繁衍生长法 这种方法不是在“染色体”中直接编码神经网络的结构,而是把一些简单的生长语法规则编码入“染色体”中;然后,由遗传算法对这些生长语法规则不断进行改变,最后生成适合所解的问题的神经网络。这种方法与自然界生物地生长进化相一致。 3.遗传算法在网络分析中的应用 遗传算法可用于分析神经网络。神经网络由于有分布存储等特点,一般难以从其拓扑结构直接理解其功能。遗传算法可对神经网络进行功能分析,性质分析,状态分析。 遗传算法虽然可以在多种领域都有实际应用,并且也展示了它潜力和宽广前景;但是,遗传算法还有大量的问题需要研究,目前也还有各种不足。首先,在变量多,取值范围大或无给定范围时,收敛速度下降;其次,可找到最优解附近,但无法精确确定最扰解位置;最后,遗传算法的参数选择尚未有定量方法。对遗传算法,还需要进一步研究其数学基础理论;还需要在理论上证明它与其它优化技术的优劣及原因;还需研究硬件化的遗传算法;以及遗传算法的通用编程和形式等。 神经网络的应用及其发展 神经网络的应用及其发展 来源:辽宁工程技术大学作者: 苗爱冬 [摘要] 该文介绍了神经网络的发展、优点及其应用和发展动向,着重论述了神经网络目前的几个研究热点,即神经网络与遗传算法、灰色系统、专家系统、模糊控制、小波分析的结合。 [关键词]遗传算法灰色系统专家系统模糊控制小波分析 一、前言 神经网络最早的研究20世纪40年代心理学家Mcculloch和数学家Pitts 合作提出的,他们提出的MP模型拉开了神经网络研究的序幕。神经网络的发展大致经过三个阶段:1947~1969年为初期,在这期间科学家们提出了许多神经元模型和学习规则,如MP模型、HEBB学习规则和感知器等;1970~1986年为过渡期,这个期间神经网络研究经过了一个低潮,继续发展。在此期间,科学家们做了大量的工作,如Hopfield教授对网络引入能量函数的概念,给出了网络的稳定性判据,提出了用于联想记忆和优化计算的途径。1984年,Hiton教授提出Boltzman机模型。1986年Kumelhart等人提出误差反向传播神经网络,简称BP网络。目前,BP网络已成为广泛使用的网络;1987年至今为发展期,在此期间,神经网络受到国际重视,各个国家都展开研究,形成神经网络发展的另一个高潮。神经网络具有以下优点: (1) 具有很强的鲁棒性和容错性,因为信息是分布贮于网络内的神经元中。 (2) 并行处理方法,使得计算快速。 (3) 自学习、自组织、自适应性,使得网络可以处理不确定或不知道的系统。 (4) 可以充分逼近任意复杂的非线性关系。 (5) 具有很强的信息综合能力,能同时处理定量和定性的信息,能很好地协调多种输入信息关系,适用于多信息融合和多媒体技术。 二、神经网络应用现状 神经网络以其独特的结构和处理信息的方法,在许多实际应用领域中取得了显著的成效,主要应用如下: (1) 图像处理。对图像进行边缘监测、图像分割、图像压缩和图像恢复。 (2) 信号处理。能分别对通讯、语音、心电和脑电信号进行处理分类;可用于海底声纳信号的检测与分类,在反潜、扫雷等方面得到应用。 (3) 模式识别。已成功应用于手写字符、汽车牌照、指纹和声音识别,还可用于目标的自动识别和定位、机器人传感器的图像识别以及地震信号的鉴别神经网络pid控制matlab程序
遗传算法在BP神经网络优化中的应用.
pid神经网络控制器的设计
基于遗传算法的BP神经网络MATLAB代码
基于S函数的RBF神经网络PID控制器
神经网络PID控制
遗传算法与神经网络的结合.
基于神经网络的PID控制
遗传算法优化BP神经网络的实现代码-共6页
介绍遗传算法神经网络
基于遗传算法的BP神经网络的应用
神经网络与遗传算法
遗传算法优化BP神经网络权值和阈值(完整版)
MATLAB基于BP神经网络PID控制程序
神经网络和遗传算法中英文对照外文翻译文献
神经网络和遗传算法有什么关系
神经网络的应用及其发展
相关主题
文本预览