
第8章 点的合成运动
8-1 如图 8-1 所示,光点 M 沿 y 轴作谐振动,其运动
方程为 x = 0, y = a cos(kt +β)
如将点 M 投影到感光记录纸上,此纸以等速v e 向左运动。求点 M 在记录纸上的轨迹。
解 动系O 'x ' y '固结在纸上,点 M 的相对运动
方程
x '= v e t , y '= a cos(kt + β) 消去t 得点 M 在记录纸上
的轨迹方程
k
y '= a cos(
x '+β)
v e
8-2 如图 8-2 所示,点 M 在平面Ox ' y '中运动,图 8-1 运动方程为
x '= 40(1? cos t ) , y '= 40sin t
式中t 以 s 计,x '和 y '以 mm 计。平面Ox ' y '又绕垂直于该平面的轴O 转动,转动方程为 ?= t rad ,式中角?为动系的 x '轴与定系的 x 轴间的交角。求点 M 的相对轨迹和绝对轨迹。
解 由点 M 的相对运动方程可改写为
? x ' ?
???
40 ?1??? = ?cos t
y ' = sin t
40
上2式两边平方后相加,得点 M 的相对轨迹方程
(x '?40)2 + y '2 =1600图 8-2由题得点 M 的坐标变换关系式
x = x 'cos ?? y 'sin ?y =
x 'sin ?+ y 'cos ?
将?= t 和相对运动方程代入,消去t 得点M 的绝对轨迹方程 (x + 40)2 + y 2 =1600
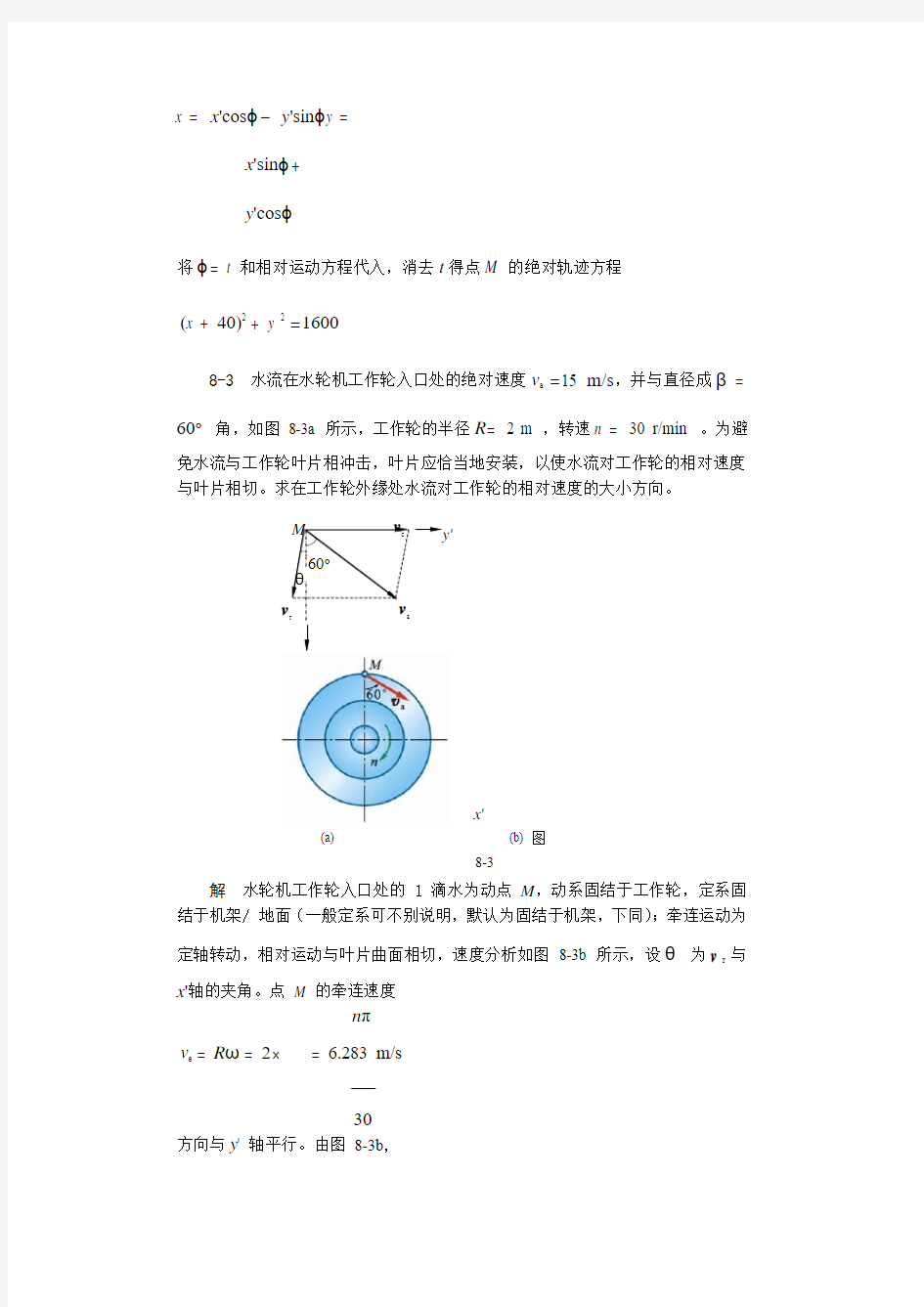
8-3 水流在水轮机工作轮入口处的绝对速度v a =15 m/s ,并与直径成β=
60° 角,如图 8-3a 所示,工作轮的半径R = 2 m ,转速n = 30 r/min 。为避
免水流与工作轮叶片相冲击,叶片应恰当地安装,以使水流对工作轮的相对速度与叶片相切。求在工作轮外缘处水流对工作轮的相对速度的大小方向。
x ′
(a) (b) 图
8-3
解 水轮机工作轮入口处的 1 滴水为动点 M ,动系固结于工作轮,定系固结于机架/ 地面(一般定系可不别说明,默认为固结于机架,下同);牵连运动为定轴转动,相对运动与叶片曲面相切,速度分析如图 8-3b 所示,设θ为v r 与
x '轴的夹角。点 M 的牵连速度 n π
v e = R ω= 2×
= 6.283 m/s
30
方向与y ' 轴平行。由图 8-3b ,
′
v
v e v a v r
= =
sin(60° +θ) sin(90° ?θ) s in30°由前1
等式得
v e cosθ= v a sin(60° +θ)
v e ?v a
sin60°即tanθ=
v a cos60°
把v e = 6.283 m/s及v a =15 m/s代
入,解得θ= 41°48'由后1等式
得
sin30°
v r = v a =10.1
m/scosθ
8-4如图8-4a 所示,瓦特离心调速器以角速度ω绕铅直轴转动。由于机器负荷的变化,调速器重球以角速度ω1 向外张开。如ω=10 rad/s ,ω1 =1.2 rad/s ,球柄长l = 500 mm ,悬挂球柄的支点到铅直轴的距离为e = 50 mm,球柄与铅直轴间所成的交角β= 30°。求此时重球的绝对速度。
y ′
解 重球为动点,动系固结于铅垂轴;牵连运动为定轴转动,相对运动为绕悬点之圆
弧摆动,且v e ⊥ v r ,绝对运动为空间曲线,如图 8-4b 所示。由于 v e = (e + l sin β)ω= 3 m/s ,v r = l ω1
= 0.6 m/s 所以
v a = v e 2 + v r 2 = 3.06 m/s v a 在v e ,v r 决定的平面内,且
v r tan ∠(v a ,v e )
=
= 0.2
v e
8-5 杆 OA 长l ,由推杆推动而在图面内绕点 O 转动,如图 8-5a 所示。假定推杆的速度为v ,其弯头高为a 。求杆端 A 的速度的大小(表示为推杆至点 O 的速度 x 的函数)。
(a) (b)
图 8-5
B
A
v e v a
v x
? v
ω A r v
解 直角推杆上与杆 AO 接触点 B 为动点,动系固结于 AO ;牵连运动为定轴转动,绝对运动为水平直线运动,相对运动为沿杆 OA 直线运动。点 B 速度分析如图 8-5b ,设 OA 角速度为ω,则
v a = v ,v e =ω?OB = v a sin ?,
ω?OB = v sin ?a a
sin ?=代入上式得
以
ω= 2
2
x + a
最终得
lav
v a =ωl = 2 2 x + a 方向如图。
8-6 车床主轴的转速n = 30 r/min ,工件的直径d = 40 mm ,如图 8-6a 所示。如车刀横向走刀速度为v =10 mm/s ,求车刀对工件的相对速度。
v r
v e
(a) (b) 图8-6
解 车刀头为动点,动系固结于工件;牵连运动为定轴转动,绝对运动为水平直线,
相对运动为螺旋曲线。点 M 的牵连速度v e 垂直向下,绝对速度v a = v ,相对速度v r 在v a 与v e 所决定的平面内,且设与v a 成?角,如图 8-6b 所示。 d n π
2 2 a x OB +
= va
v a = v =10 mm/s,v e mm/s所以
v r = v a2 + v e2 = 102 + 62.832 = 63.6 mm/s
?1 v e ?1 ?= tan ( ) =
tan (6.283) = 80°57'
v a
8-7在图8-7a 和图8-7b 所示的 2 种机构中,已知O1O2 = a = 200 mm ,
ω1 = 3 rad/s 。求图示位置时杆O2 A的角速度。
图8-7
解(a)套筒A 为动点,动系固结于杆O2 A;绝对运动为O1 绕的圆周运动,相对
运动为沿O2 A直线,牵连运动为绕O2 定轴转动。速度分析如图8-7a1 所示,由速度合成定理
v a = v e + v r
因为ΔO1O2 A为等腰三角形,故
O1 A = O1O2 = a ,O2 A = 2a cos30°,v a = aω1 ,v e =ω?O2 A = 2aωcos30°由图8-7a1:
v a v a =
= 2aωcos30°得
aω1 = 2aωω==1.5
rad/s(逆)
(b)套筒A 为动点,动系固结于杆O1 A;绝对运动为绕O2 圆周运动,相对运动为沿杆直线运动,牵连运动为绕O1 定轴转动。速度分析如图8-7b1 所示。
v a = O2 A?ω1 = 2aωcos30°,v e = O1 Aω1 = aω1
v e aω1
由图b1:v a = =
cos30°cos30°
a
ω1得2aωcos30°
=
cos30°
rad/s(逆)
8-8 图8-8a 所示曲柄滑道机构中,曲柄长OA = r ,并以等角速度ω绕轴O转动。装在水平杆上的滑槽DE 与水平线成60°角。求当曲柄与水平线的交角分别为?= 0°,30°,60°时,杆BC 的速度。
°
60
sin 3 3
图8-8
解曲柄端点 A 为动点,动系固结于杆 BC ;绝对运动为绕 O 圆周运动,相对运动为
沿滑道 DB 直线运动,牵连运动为水平直线平移。速度分析如图 8-8b 所示
∠(v a , y ) =?, v a =
r ω从图 b 得
v e
= v a
sin(30°
??)
sin60° 所以
sin(30° ??)
v BC = v e = r ω ?= 0°时,v BC = r ω(←); ?= 30°时,v BC = 0?= 60°时,v BC = ?r ω(→)
8-9 如图 8-9a 所示,摇杆机构的滑杆AB 以等速v 向上运动,初瞬时摇杆OC 水平。摇杆长OC = a ,距离OD = l 。求当?=
时点 C 的速度的大小。
3 3
(a) (b) 图8-9
解 套筒 A 为动点,动系固结于杆 OC ;绝对运动为上下直线,相对运动沿 OC 直线,
牵连运动为绕 O 定轴转动。速度分析如图 8-9b 所示,设杆 OC 角速度为ω,其转向逆时
针。由题意及几何关系可得
v a = v
(1)
v e =ω?OA
(2)
v a = e (3)
OA = (4) cos ?= (5)
式(1),(2),(4),(5)代入式(3),得
ω?OA =ωOA 2 ω(v 2t 2 + l 2 )
v =
= = cos ? l l
vla
D O
?
cos v
2 2 2 t v l + OA
l
ω= 2 2 2
v t + l
因
vla
v C =ω?a = 2 2 2 v t
+ l
当 ?= 时,v ?t = l ,故
va v C =
2l
8-10 平底顶杆凸轮机构如图 8-10a 所示,顶杆 AB 可沿导轨上下移动,偏心圆盘绕轴 O 转动,轴 O 位于顶杆轴线上。工作时顶杆的平底始终接触凸轮表面。该凸轮半径为 R ,偏心距OC = e ,凸轮绕轴O 转动的角速度为ω,OC 与水平线夹角?。求当?= 0°时,顶杆的速度。
(a) (b) 图
8-10
解 (1)运动分析
ω O
? C R A B
e
v a v r
v e
轮心C 为动点,动系固结于AB;牵连运动为上下直线平移,相对运动为与平底平行直线,绝对运动为绕O 圆周运动。
(2)速度分析,如图8-10b 所
示v a = v e + v r
方向⊥ OC↑ ←
大小eω ? ?
v AB = v e = v a cos?= eω
8-11绕轴O 转动的圆盘及直杆OA 上均有1导槽,两导槽间有1活动销
子M 如图8-11a 所示,b = 0.1 m 。设在图示位置时,圆盘及直杆的角速度分
别为ω1 = 9 rad/s 和ω2 = 3 rad/s。求此瞬时销子M 的速度。
(a) (b) 图8-11
解(1)运动分析
①活动销子M 为动点,动系固结于轮O;牵连运动为绕O 定轴转动,相对运
动为沿轮上导槽直线,绝对运动为平面曲线。
v a = v e1 + v r1(1)
②活动销子M 为动点,动系固结于杆OA;牵连运动为绕O 定轴转动,相对运
动为沿OA 直线,绝对运动为平面曲线。
v a = v e2 + v r2 (2)
速度分析如图8-11b 所示,由式(1)、(2)得
v e1 + v r1 = v e2 + v r2(3)
方向⊥ OM√ ⊥ OM√ 大小OM ?ω1?
OM ?ω2?
式(3)向v e2 方向投影,得 v e1 ? v r1 cos30° =
v e2
b b
ω ?
ω
v
= v e1 ? v e2 = cos30°
1
cos30° 2 = 4 b (ω ?ω )
r1
1
2
cos30° cos30° 3
式(3)向v r2 方向投影,得
1
2b
v r2 =
v r1 =
(ω1 ?ω2 ) = 0.4 m/s
2 3
v e2
?
? v r2 0.4
8-12 图 8-12a 为叶片泵的示意图。当转子转动时,叶片端点 B 将沿固定的定子曲线运动,同时叶片 AB 将在转子上的槽 CD 内滑动。已知转子转动的角速度为ω,槽 CD 不通过轮心点 O ,此时 AB 和 OB 间的夹角为β,OB 和定子曲线的法线间成θ角,OB =ρ。求叶片在转子槽内的滑动速度。
(a) (b) 图8-12
解 (1)运动分析
m/s 346. 0 3 2
3 1
. 0 = × =
所以 ? ? ? ° = = = = + = 9
. 40 , 346 . 0 tan m/s 529. 0
e2 2 r2 2 e2 a θ θ
v v v v
叶片 AB 上的点 B 为动点,动系固结于转子;绝对运动为定子曲线,相对运动为沿
槽
CD 直线,牵连运动为绕 O 定轴转动。
(2)速度分析如图 8-12b 所示。设 AB 相对 CD 滑动速度为v r ,转子作顺时针转动,点 B 的牵连速度为: v e =ω?OB =ωρ 由图 8-12b 得
v r = v e sin θ sin[90°-(θ-β )]
v e sin θ ωρsin θ v r = = cos(θ?β) cos(θ?β)
8-13 直线 AB 以大小为v 1 的速度沿垂直于 AB 的方向向上移动;直线 CD 以大小为v 2 的速度沿垂直于 CD 的方向向左上方移动,如图 8-13a 所示。如两直线间的交角为θ,求两直线交点 M 的速度。
(a) (b) 图
8-13
解先将动系固结于杆 AB ,则动点 M 的牵连速度为v 1 ,相对速度v r1 沿 AB ;再将动系固结于杆 CD ,则动点 M 的牵连速度为v 2 ,相对速度v r2 沿 CD ,见图 8-13b ,两种情况用速度合成定理矢量式分别为
v M = v 1 + v r1 (1) v M = v 2 + v r2 (2)
由式(1),(2)得
A B
D
θ
1 v M
v 2 v 1
r v 2 r v M
v1 + v r1 = v2 + v r2
上式分别向水平轴x和铅垂轴y 投影得
0 + v r1 = ?v2 sinθ+ v r2 cosθ
v1 + 0 = v2 cosθ+ v r2
sinθ解得
v1 cosθ? v 2
v r1 = sinθ代入式(1)得v M = v12 +
v r21 = v12 + v22 ?2v1v2 cosθ
8-14图8-14a 所示两盘匀速转动的角速度分别为ω1 =1 rad/s,ω2 = 2 rad/s ,两盘半径均为R = 50 mm,两盘转轴距离l = 250 mm。图示瞬时,两盘位于同1平面内。求
图8-14
解(1)运动分析
轮2上点A 为动点,动系固结于轮1;绝对运动为水平面O2 x2 y2 内,以O2 为圆心的圆周运动,相对运动为空间曲线,牵连运动为绕O1 定轴转动。
ωe =ω1i ,ωa =ω2 k ,r e = (l + R) j,r a = R jv e =ωe
×r e = (l + R)ω1k ,v a =ωa ×r a = ?Rω2 i
(2)速度分析,如图8-14b
所示v a = v e + v r
v r = v a ?v e = ?Rω2 i ?(l + R)ω1k = ?100i ?300k
mm/s v r = 1002 + 3002 = 316 mm/s a e =ωe ×r e =?(l + R)ω12 j ,
a a =ωa ×v a =?Rω22 ja C = 2ωe ×r r = 2ω1i ×(?Rω2i ?(l +
R)ω1k) = 2(l + R)ω12 j
(3)加速度分析,如图8-14b 所示a a = a e + a r + a C a r
= a a ?a e ?a C = ?Rω22 j + (l + R)ω12 j ?2(l +
R)ω1 2 j
= ?(Rω22 + (l + R)ω12 ) j = ?(200 + 300) j = ?500 j mm/s2 (←)
8-15图8-15a 所示公路上行驶的两车速度都恒为72 km/h。图示瞬时,在车B 中的观察者看来,车 A 的速度、加速度应为多大?
图8-15
解(1)运动分析
车 A 为动点,动系固结于车B;绝对运动为直线;相对运动为平面曲线;牵连运动为定轴转动。
(2)速度分析,如图8-15b 所示
v a = v e + v r(1)方向v A⊥ OA?
3
大小v A v B?2
v A = v B =
20
m/s v
20
m/s
ωe = B = = 0.2 rad/s R
100 m
v e =ωe ×150 m = 30 m/s v r = v a ?v e = 47.32i'+10 j' m/s,
tanθ= ,θ=11.93°
(3)加速度分析,如图8-15c 所示
a a = a e + a r + a C(2)
方向√ AO?⊥ v r
大小 0 AO?ωe2?2ωe v r
a e m/s2
a C = 2ωe v r = 2× ×48.365 =19.346 m/s2式(2)向y'
投影,得
a r y' = a e ?a C cosθ= 6 ?19.346cos11.93° = ?12.9
式(2)向x'投影,得a r x' = a C sinθ= 4所以
a r = 4i'?12.9 j' m/s2
8-16图8-16a 所示小环M 沿杆OA 运动,杆OA 绕轴O 转动,从而使小环在
Oxy 平
图8-16
解(1) t =1 s 时,
??x =10 3 mm ??x&=10 3 mm/s ?&x&= 0
?,?,?
??y =10 3 mm ?
?y&= 20 3 mm/s ?&y&= 20 3
mm/s v a = x&2 + y&2 =10 15 mm/s由图8-16b
v a y tan(θ+
45°) = = 2, θ=18.43°
v a x
(2)v a = v e + v r
v r = v a sin18.43° = 36.74 mm/s(小环M 相对杆OA 的速度)(1)v e = v a sin18.43° =12.24 mm/s
v 12.24
ωOA = e = = 0.5 rad/s (逆时针转向)(2)OM 10 6
(3)a a = a e n + a e t + a r + a C (3) 方向√ √ √ √
√ 大小√ √ ??
√ a a = &y&= 20 3 mm/s2
a e n = OM ?ωOA 2 =10 6 ×0.52 = 6.1237 mm/s 2
a C = 2ωOA v r = 2×0.5×36.74 = 36.74 mm/s 2 式(3)向a r 方向投影,得
a a cos45°
= ?a e n + a r
a r = a a + a e n =10 6 +6.123 7 = 30.6 mm/s 2
式(3)向a e t 方向投影,得 a a cos45° = a e t + a C a e t =
a a ? a C =10 6 ?36.74 = ?12.245 mm/s 2
α
OA
= a et
= ?12.245 = ?0.5 rad/s 2 (顺时针转向) (4)
OM 10 6
8-17 图 8-17a 所示铰接四边形机构中,O 1 A = O 2 B =100 mm ,又O 1O 2 = AB ,杆O 1 A 以等角速度ω= 2 rad/s 绕O 1 轴转动。杆 AB 上有1套筒C ,此筒与杆CD 相铰接。
图8-17
解 杆CD 上点C 为动点,动系固结于杆 AB ;牵连运动为曲线平移,相对运动沿
BA
直线,绝对运动为上下直线。速度与加速度分析分别如图 8-17b 、图 8-17c 所示,
图中 v A = v B = v e ,v CD = v a ,a A = a B = a e ,a CD = a a
于是得
v CD = v a = v e cos ?= O 1 A ?ωcos ?= 0.10 m/s
2 2
2 2
a CD = a a = a e sin ?= O 1 A ?ω2 sin ?= 0.346 m/s 2 方向如图。
8-18 剪切金属板的‘飞剪机’结构如图 8-18a 。工作台 AB 的移动规律是
s = 0.2sin t m ,滑块C 带动上刀片E 沿导柱运动以切断工件D ,下刀片F 固
定在工作台上。设曲柄OC = 0.6 m ,t =1 s 时,?= 60°。求该瞬时刀片E 相对于工作台运动的
图8-18
解s = 0.2sin t (1)运动分析 OC 上 C 为动点,动系固结于 AB ;绝对运动为以 O 为圆心的圆周运动;相对运动为上下直线;牵连运动为水平直线平移。 (2)速度分析,如图 8-16b 所示
v a = v e + v r (1)
方向 ⊥ OC → ↓ 大小 ? s & ?
v e = s &= 0.2×
m/s (t =1 s ) π
60 3
6 π cos 6 π
= t 3 3 速度和加速度,并求曲柄 OC 转动的角速度及角加速度。
O
B
O
(a) (b) (c)
v r = v e tan30° = π ?= 0.052 m/s(t =1 s )
60 3
v a = 2v r = 0.105 m/s(t =1 s )
v 0.105
ω= a = = 0.175 rad/s OC
OC 0.6 (3)加速度分析,如图8-16c
所示
a a n + a a t = a e + a r(2)
方向√ √ √ √
大小√ ?√ ?
&s&= 0.2(π )2 sinπ t = π 2 m/s2
(←)a e =
6 6
360 n v a2 2a a = =
0.0184 m/s OC 式(2)向a e 投
影,得
a a n cos60°+ a a t sin60°= a e a a t = 0.021 m/s2 ,αOC =
= 0.035 rad/s2(↑)式(2)向a a n 投影,得
a a n = a e cos60°? a r cos30°,
a r = ?0.00542 m/s2(↓)
8-19如图8-19a 所示,曲柄OA长0.4 m,以等角速度ω= 0.5 rad/s绕O轴逆时针转向转动。由于曲柄的A端推动水平板B ,而使滑杆C 沿铅直方向上升。求当曲柄与水平线间的夹角θ= 30°时,滑杆C 的速度和加速度。
1. 图示的曲柄滑道机构中,曲柄长OA =10cm ,绕O 轴转动。当?=30°时,其角速度ω=1rad/s ,角加速度α=1rad/s 2,求导杆BC 的加速度和滑块A 在滑道中的相对加速度。 解 取滑块A 为动点,动坐标系固连于导杆上。 切向加速度a a τ和法向加速度a a n ,其大小分别为 a a τ=OA ·ε=10cm/s 2 a a n =OA ·ω2=10cm/s 2 牵连运动为平动的加速度合成定理为 a a = a a τ+ a a n = a e + a r 将上式各矢量分别投影在x 轴和y 轴上,解得 a r ==3.66cm/s 2 a e =13.66cm/s 2 a e 即为导杆在此瞬时的平动加速度。 2. 滚压机构的滚子沿水平地面作纯滚动。已知曲柄OA 长r ,以匀角速度ω转动。连杆AB 长r L 3=, 滚子半径为R 。求图示位置滚子的角速度和角加速度。 解 (1)分析运动,先选AB 杆为研究对象 (2)根据瞬心法求v B 先找到速度瞬心C v B = ωr 3 3 2 (3)利用加速度公式求a B n BA t BA A B a a a a ρρρρ++= ωAB = v A /AC = rω/3r = ω/3
a BA n = ABωAB 2= 3rω2/9 a B = 2 rω2/9 (4)再取滚子为研究对象,求ωB 和αB ωB = v B /R = ωr R 33 2 αB = dωB /dt =1/R ·dv B /dt = a B /R = 2 rω2/9R 3. 图示的四连杆机构中,O 1A =r , AB =O 2B =3r ,曲柄以等角速度ω1绕O 1轴转动。在图示位置时,O 1A ⊥AB ,∠O 2BA =60°。求此瞬时杆O 2B 的角速度ω2和角加速度2α。 解 (1)先计算杆O 2B 的角速度 杆O 1A 和O 2B 作定轴转动,连杆AB 作平面运动。过A 、B 两点作A v ρ、B v ρ 的垂线,其交点C 就是连杆AB 的瞬心。 根据瞬心法或者速度投影法可以求得 ο30cos B A v v = 于是 ωr v v A B 3 230 cos = =ο
第四章 点的运动和刚体基本运动 习题解答 4-1 图示曲线规尺的杆长200==AB OA mm ,50====AE AC DE CD mm 。杆OA 绕O 轴转动的规律为t 5 π?= rad ,并且当运动开始时,角 0=?,求尺上D 点的运动方程和轨迹。 解: 已知t π?2.0=,故点D 的运动方程为 m m 2.0cos 200D t x π= m m 2.0sin 100D t y π= 消去时间t 得到点D 的轨迹方程为 11002002 222=+D D y x (椭圆) 4-2 图示AB 杆长l ,以t ω?=的规律绕B 点转动, ω为常量。而与杆连接的滑块B 以t b a s ωsin +=的规 律沿水平线作谐振动,a 、b 为常量。求A 点的轨迹。 解: 采用直角坐标法,取图示直角坐标系O xy , 则A 点位置坐标为?sin l s x += ,?cos l y -=,即 ()t l b a x ωsin ++= t l y ωcos -=. 消去时间t 得A 点轨迹方程为: 2 2 2 2()1()x a y b l l -+=+.(椭圆) 4-3 套筒A 由绕过定滑轮B 的绳索牵引而沿导轨上升,滑 轮中心到导轨的距离为l ,如图所示。设绳索以等速0v 拉下,忽略滑轮尺寸。求套筒A 的速度和加速度与距离x 的关系式。 解:设0=t 时,绳上C 点位于B 处,在瞬时t ,到达图示位置 则 =++= +t v l x BC AB 022常量,将上式求导,得到管套 A 的速度和加速度为 2 20d d l x x v t x v A +-==, 32 20d d x l v t v a A A -==, 负号表示A A a v ,的实际方向与x 轴相反。 4-4 如图所示,半径为R 的圆形凸轮可绕O 轴转动,带动顶杆BC 作铅垂直线运动。设凸轮圆心在A 点,偏心距e =OA ,t ω?=,其中ω为常量。试求顶杆上B 点的运动方程、速度和加速度。 解:以O 点为原点建立坐标系,由余弦定理可得 2222cos AB OA OB OA OB t ω=+-?? 其中OA=e ,AB=R ,设B y =OB 代入上式 题 4-1图 题4-2图 题4-3图
第六章点的合成运动 一、是非题 1、不论牵连运动的何种运动,点的速度合成定理v a=v e+v r皆成立。() 2、在点的合成运动中,动点的绝对加速度总是等于牵连加速度与相对加速度的矢量和。() 3、当牵连运动为平动时,相对加速度等于相对速度对时间的一阶导数。() 4、用合成运动的方法分析点的运动时,若牵连角速度ωe≠0,相对速度υr≠0,则一定有不为零的科氏加速度。() 5、若将动坐标取在作定轴转动的刚体上,则刚体内沿平行于转动轴的直线运动的动点,其加速度一定等于牵连加速度和相对加速度的矢量和。() 6、刚体作定轴转动,动点M在刚体内沿平行于转动轴的直线运动,若取刚体为动坐标系,则任一瞬时动点的牵连加速度都是相等的。() 7、当牵连运动定轴转动时一定有科氏加速度。() 8、如果考虑地球自转,则在地球上的任何地方运动的物体(视为质点),都有科氏加速度。() 二、选择题 1、长L的直杆OA,以角速度ω绕O轴转动,杆的A端铰 接一个半径为r的圆盘,圆盘相对于直杆以角速度ωr,绕A轴 转动。今以圆盘边缘上的一点M为动点,OA为动坐标,当AM 垂直OA时,点M的相对速度为。 ①υr=Lωr,方向沿AM; ②υr=r(ωr-ω),方向垂直AM,指向左下方; ③υr=r(L2+r2)1/2ωr,方向垂直OM,指向右下方; ④υr=rωr,方向垂直AM,指向在左下方。 2、直角三角形板ABC,一边长L,以匀角速度ω绕B轴转动,点M以S=Lt的规律自A向C运动,当t=1秒时,点M的相对加速度的大小α r= ;牵连加速度的大小αe = ;科氏 加速度的大小αk = 。方向均需在图中画出。 ①Lω2; ②0; ③3Lω2;
2 v v e =1 v v =AB r v v =0 450 45 v r =N 竞赛资料 点的合成运动习题解 [习题7-1]汽车A 以h km v /401=沿直线道路行驶,汽车B 以h km v /2402=沿另一叉道行驶。求在B 车上观察到的A车的速度。 解: 动点:A 车。 动系:固连于B 车的坐标系。 静系:固连地面的坐标系。 绝对运动:动点A 相对于地面的运动。 相对运动:动点A 相对于B 车的运动。 牵连运动:在动系中,动点与动系的重合点, 即牵连点相对于静系(地面)的运动。当A、 B两车相遇时,即它们之间的距离趋近于0时, A、B相重合,B车相对于地面的速度就是 牵连速度。2v v e =。由速度合成定理得: → →→ +=r e v v v 。用作图法求得: h km v v AB r /40== (↑) 故,B车上的人观察到A车的速度为h km v v AB r /40==,方向如图所示。 [习题7-2]由西向东流的河,宽1000m ,流速为s ,小船自南岸某点出发渡至北岸,设小船相对于水流的划速为1m/s 。问:(1)若划速保持与河岸垂直,船在北岸的何处靠岸?渡河时间需多久?(2)若欲使船在北岸上正对出发点处靠岸,划船时应取什么方向?渡河时间需多久? 解:(1) 动点:船。 动系:固连在流水上。 静系:固连在岸上。 绝对运动:岸上的人看到的船的运动。 相对运动:船上的有看到的船的运动。 牵连运动:与船相重合的水体的运动。 绝对速度:未知待求,如图所示的v 。 相对速度:s m v r /1=,方向如图所示。 牵连速度:s m v e /5.0=,方向如图所示。 由速度合成定理得:
运动学重要知识点 一、刚体的简单运动知识点总结 1.刚体运动的最简单形式为平行移动和绕定轴转动。 2.刚体平行移动。 ·刚体内任一直线段在运动过程中,始终与它的最初位置平行,此种运动称为刚体平行移动,或平移。 ·刚体作平移时,刚体内各点的轨迹形状完全相同,各点的轨迹可能是直线,也可能是曲线。 ·刚体作平移时,在同一瞬时刚体内各点的速度和加速度大小、方向都相同。 3.刚体绕定轴转动。 ?刚体运动时,其中有两点保持不动,此运动称为刚体绕定轴转动,或转动。 ?刚体的转动方程φ=f(t)表示刚体的位置随时间的变化规律。 ?角速度ω表示刚体转动快慢程度和转向,是代数量,。角速度也可 以用矢量表示,。 ?角加速度表示角速度对时间的变化率,是代数量,,当α与ω同号时,刚体作匀加速转动;当α与ω异号时,刚体作匀减速转动。角加速度 也可以用矢量表示,。 ?绕定轴转动刚体上点的速度、加速度与角速度、角加速度的关系: 。 速度、加速度的代数值为。 ?传动比。
一、点的运动合成知识点总结 1.点的绝对运动为点的牵连运动和相对运动的合成结果。 ?绝对运动:动点相对于定参考系的运动; ?相对运动:动点相对于动参考系的运动; ? 牵连运动:动参考系相对于定参考系的运动。 2.点的速度合成定理。 ?绝对速度:动点相对于定参考系运动的速度; ?相对速度:动点相对于动参考系运动的速度; ?牵连速度:动参考系上与动点相重合的那一点相对于定参考系运动的速度。 3.点的加速度合成定理。 ?绝对加速度:动点相对于定参考系运动的加速度; ?相对加速度:动点相对于动参考系运动的加速度; ?牵连加速度:动参考系上与动点相重合的那一点相对于定参考系运动的加速度; ?科氏加速度:牵连运动为转动时,牵连运动和相对运动相互影响而出现的一项附加的加速度。 ?当动参考系作平移或= 0 ,或与平行时, = 0 。 该部分知识点常见问题有
第五章运动学基础 一、是非题 1.已知直角坐标描述的点的运动方程为X=f1(t),y=f2(t),z=f3(t),则任一瞬时点的速度、加速度即可确定。()2.一动点如果在某瞬时的法向加速度等于零,而其切向加速度不等于零,尚不能决定该点是作直线运动还是作曲线运动。()3.切向加速度只表示速度方向的变化率,而与速度的大小无关。()4.由于加速度a永远位于轨迹上动点处的密切面内,故a在副法线上的投影恒等于零。()5.在自然坐标系中,如果速度υ=常数,则加速度α=0。()6.在刚体运动过程中,若其上有一条直线始终平行于它的初始位置,这种刚体的运动就是平动。()7.刚体平动时,若刚体上任一点的运动已知,则其它各点的运动随之确定。()8.若刚体内各点均作圆周运动,则此刚体的运动必是定轴转动。()9.定轴转动刚体上点的速度可以用矢积表示为v=w×r,其中w是刚体的角速度矢 量,r是从定轴上任一点引出的矢径。() 10、在任意初始条件下,刚体不受力的作用、则应保持静止或作等速直线平动。() 二、选择题 1、已知某点的运动方程为S=a+bt2(S以米计,t以秒计,a、b为常数),则点的轨迹。 ①是直线;②是曲线;③不能确定。 2、一动点作平面曲线运动,若其速率不变,则其速度矢量与加速度矢量。 ①平行;②垂直;③夹角随时间变化。 3、刚体作定轴转动时,切向加速度为,法向加速度为。 ①r×ε②ε×r ③ω×v④v×ω 4、杆OA绕固定轴O转动,某瞬时杆端A点的加速度 α分别如图(a)、(b)、(c)所示。则该瞬时的角速度为零, 的角加速度为零。 ①图(a)系统;②图(b)系统;③图(c)系统。
质点动力学的基本方程 知识总结 1.牛顿三定律适用于惯性参考系。 质点具有惯性,以其质量度量; 作用于质点的力与其加速度成比例; 作用与反作用力等值、反向、共线,分别作用于两个物体上。 2.质点动力学的基本方程。 质点动力学的基本方程为,应用时取投影形式。 3.质点动力学可分为两类基本问题。 质点动力学可分为两类基本问题: (1). 已知质点的运动,求作用于质点的力; (2). 已知作用于质点的力,求质点的运动。 求解第一类问题,需先求得质点的加速度;求解第二类问题,一般是积分的过程。质点的运动规律不仅决定于作用力,也与质点的运动初始条件有关,这两类的综合问题称为混合问题。 动量定理 知识点总结 1.牛顿三定律适用于惯性参考系。 质点具有惯性,以其质量度量; 作用于质点的力与其加速度成比例; 作用与反作用力等值、反向、共线,分别作用于两个物体上。 2.质点动力学的基本方程。 质点动力学的基本方程为,应用时取投影形式。 3.质点动力学可分为两类基本问题。 质点动力学可分为两类基本问题: (1). 已知质点的运动,求作用于质点的力; (2). 已知作用于质点的力,求质点的运动。
求解第一类问题,需先求得质点的加速度;求解第二类问题,一般是积分的过程。质点的运动规律不仅决定于作用力,也与质点的运动初始条件有关,这两类的综合问题称为混合问题。 常见问题 问题一在动力学中质心意义重大。质点系动量,它只取决于质点系质量及质心速度。 问题二质心加速度取决于外力主失,而与各力作用点无关,这一点需特别注意。 动量矩定理 知识点总结 1.动量矩。 质点对点O 的动量矩是矢量。 质点系对点O 的动量矩是矢量。 若z 轴通过点O ,则质点系对于z 轴的动量矩为 。 若 C 为质点系的质心,对任一点O 有。 2.动量矩定理。 对于定点O 和定轴z 有 若 C 为质心,C z 轴通过质心,有
习 题 5-1 如图5-13所示,偏心轮半径为R ,绕轴O 转动,转角t ω?=(ω为常量),偏心距e OC =,偏心轮带动顶杆AB 沿铅垂直线作往复运动。试求顶杆的运动方程和速度。 图5-13 )(cos )sin(222t e R t e y ωω-+ = ) (cos 2)2sin()[cos(2 2 2 t e R t e t e y v ωωωω-+== 5-2 梯子的一端A 放在水平地面上,另一端B 靠在竖直的墙上,如图5-14所示。梯子保持在竖直平面内沿墙滑下。已知点A 的速度为常值v 0,M 为梯子上的一点,设MA = l , MB = h 。试求当梯子与墙的夹角为θ时,试点M 速度和加速度 的大小。 图5-14 A M x h l h h x += =θsin θcos l y M = 0cos v h l h x h l h h x A M +=+== θθ 得 θ θ cos )(0h l v += θθθθθt a n ) (c o s )(s i n s i n 0 0h l lv h l v l l y M +-=+?-=-= 0=M x θ θθθθ322 002 020cos )(cos )(sec )(sec )(h l lv h l v h l lv h l lv y M +- =+?+-=+-=
θ 3220 cos )(h l lv a M += 5-3 已知杆OA 与铅直线夹角6/πt =?( 以 rad 计, t 以s 计),小环M 套在杆OA 、CD 上,如图5-15所示。铰O 至水平杆CD 的距离h =400 mm 。试求t = 1 s 时,小环M 的速度和加速度。 图5-15 ?tan h x M = ??? 22sec 6 π 400sec ?== h x M ???????s i n s e c 9 π200s i n s e c 6π3π400)s i n s e c 2(6π400323 3=??=??= M x 当s 1=t 时6 π=? mm/s 3.2799π 800346π400)6π(sec 6π4002==?== M v 223232mm/s 8.168327π80021)32(9π200)6πsin()6π(sec 9π200==??=??=M a 5-4 点M 以匀速u 在直管OA 内运动,直管OA 又按t ω?=规律绕O 转动,如图5-16所示。当t = 0时,M 在点O 处,试求在任一瞬时点M 的速度和加速度的大小。 图5-16 )cos(t ut x ω= )sin(t ut y ω= )sin()cos(t t u t u x ωωω-= )cos()sin(t t u t u y ωωω+=
第5章 点的复合运动分析 5-1 曲柄OA 在图示瞬时以ω0绕轴O 转动,并带动直角曲杆O 1BC 在图示平面内运动。若d 为已知,试求曲杆O 1BC 的角速度。 解:1、运动分析:动点:A ,动系:曲杆O 1BC ,牵连运动:定轴转动,相对运动:直线,绝对运动:圆周运动。 2、速度分析:r e a v v v += 0a 2ωl v =;0e a 2ωl v v == 01e 1 ωω==A O v BC O (顺时针) 5-2 图示曲柄滑杆机构中、滑杆上有圆弧滑道,其半径cm 10=R ,圆心O 1在导杆BC 上。曲柄长cm 10=OA ,以匀角速rad/s 4πω=绕O 轴转动。当机构在图示位置时,曲柄与水平线交角 30=φ。求此时滑杆CB 的速度。 解:1、运动分析:动点:A ,动系:BC ,牵连运动:平移,相对运动:圆周运动,绝对运动:圆周运动。 2、速度分析:r e a v v v += πω401a =?=A O v cm/s ; 12640a e ====πv v v BC cm/s 5-3 图示刨床的加速机构由两平行轴O 和O 1、曲柄OA 和滑道摇杆O 1B 组成。曲柄OA 的末端与滑块铰接,滑块可沿摇杆O 1B 上的滑道滑动。已知曲柄OA 长r 并以等角速度ω转动,两轴间的距离是OO 1 = d 。试求滑块滑道中的相对运动方程,以及摇杆的转动方程。 解:分析几何关系:A 点坐标 d t r x +=ω?cos cos 1 (1) t r x ω?sin sin 1= (2) (1)、(2)两式求平方,相加,再开方,得: 1.相对运动方程 t rd r d t r d t rd t r x ωωωωcos 2sin cos 2cos 2 2 222221++=+++= 将(1)、(2)式相除,得: 2.摇杆转动方程: d t r t r += ωω?cos sin tan d t r t r +=ωω?cos sin arctan 5-4 曲柄摇杆机构如图所示。已知:曲柄O 1A 以匀角速度ω1绕轴O 1转动,O 1A = R ,O 1O 2 =b ,O 2O = L 。试求当O 1A 水平位置时,杆BC 的速度。 解:1、A 点:动点:A ,动系:杆O 2A ,牵连运动:定 轴转动,相对运动:直线,绝对运动:圆周运动。 1a ωR v A =;2 21222a e R b R R b R v v A A +=+=ω 2、B 点:动点:B ,动系:杆O 2A ,牵连运动:定轴 转动,相对运动:直线,绝对运动:直线。 C 习题5-4图 习题5-1图 A 习题5-3图
第七章作业 1、已知:如图所示,点 M 在平面Ox ' y '中运动,运动方程为:x' =40(1-cos t)mm , y' =40sin t mm,式中t 以 s 计,x ' 和 y ' 以 mm 计。平面Ox ' y ' 又绕垂直于该平面的O 轴转动,转动方程为 φ=t rad ,式中角 φ 为动坐标系的 x '轴与定坐标系的 x 轴间的交角。试求:点 M 的相对轨迹和绝对轨迹。 2 、已知:在图 a 和 b 所示的两种机构中,己知= a =200mm , =3rad/s 。 试求:图示位置时杆 A 的角速度。 3、已知:绕轴O 转动的圆盘及直杆OA 上均有一导槽,两导槽间有一活动销子M ,如图所示, b =0.lm 。设在图示位置时,圆盘及直杆的角速度分别为 =9rad/s 和=3rad/s 。试求:此瞬时销子 M 的速度。
4、已知:图示偏心轮摇杆机构中,摇杆 A 借助弹簧压在半径为 R 的偏心轮 C 上。偏心轮C 绕轴 O 往复摆动,从而带动摇杆绕轴 摆动。设 OC ⊥O时,轮 C 的角速度为ω,角加速度为零,θ =。试求:此时摇杆 A 的角速度 和角加速度 。 5、已知:小车沿水平方向向右作加速运动,其加速度 。在小车上有一轮绕 O 轴转动,轮的半径 r =0.2m ,转动的规律为 。试求:当 t =1s 时,轮缘上点 A 绝对加速度。 6、已知:图示直角曲杆OBC 以匀角速度ω=0.5rad/s 绕 O 轴转动,使套在其上的小环 M 沿固定直杆 OA 滑动, OB =0.1m , OB 与BC 垂直。 试求:当 φ =时,小环 M 的速度和加速度。
一、判断题: 1. 在自然坐标系中,如果速度v = 常数,则加速度a = 0。( ) 2、在分析点的合成运动时,动点的绝对速度一定不能恒等于零。( ) 3、对于平动刚体,任一瞬时,各点速度大小相等而方向可以不同。( ) 4、在刚体运动过程中,若刚体内任一平面始终与某固定平面平行,则这种运动就是刚体的平面运动。( ) 5、加速度 d d v t 的大小为d d v t 。( ) 6、点的法向加速度与速度大小的改变率无关。 ( ) 7、速度瞬心的速度为零,加速度也为零。 ( ) 8、火车在北半球上自东向西行驶,两条铁轨的磨损程度是相同的。( ) 9、平动刚体上各点运动状态完全相同。( ) 10、某瞬时动点的加速度等于零,则其速度可能为零。( ) 11、不论点作什么运动,点的位移始终是一个矢量。( ) 12、某动点如果在某瞬时法向加速度为零,而切向加速度不为零,则该点一定做直线运动。( ) 13、在研究点的合成运动时,所选动点必须相对地球有运动( ) 14、已知自然法描述的点的运动方程为S=f(t),则任意瞬时点的速度、加速度即可确定。( ) 15、科氏加速度的大小等于相对速度与牵连角速度之大小的乘积的两倍。 ( ) 16、作平面运动的平面图形可以同时存在两个或两个以上的速度瞬时中心。( ) 17、在自然坐标系中,如果速度v = 常数,则加速度0a 。 ( ) 18、在有摩擦的情况下,全约束力与法向约束力之间的夹角称为摩擦角。( ) 19、在分析点的合成运动时,动点的绝对速度一定不能恒等于零。( ) 20、若动系的牵连运动为定轴转动,则肯定存在哥氏加速度C a 。( ) 21、在直角坐标系中,如果一点的速度v 在三个坐标上的投影均为常数,其加速度a 必然为零。() 22、刚体平行移动时,其上各点的轨迹一定是相互平行的直线。 二.填空题 1.点M 沿螺旋线自外向内运动,如图所示。它走过的弧长与时间的一次方成正比。试分析它的加速度越来越__________(填大或小) 2.图所示平板绕AB 轴以匀角速度ω定轴转动,动点 运动方程
第8章 点的合成运动 8-1 如图 8-1 所示,光点 M 沿 y 轴作谐振动,其运动 方程为 x = 0, y = a cos(kt +β) 如将点 M 投影到感光记录纸上,此纸以等速v e 向左运动。求点 M 在记录纸上的轨迹。 解 动系O 'x ' y '固结在纸上,点 M 的相对运动 方程 x '= v e t , y '= a cos(kt + β) 消去t 得点 M 在记录纸上 的轨迹方程 k y '= a cos( x '+β) v e 8-2 如图 8-2 所示,点 M 在平面Ox ' y '中运动,图 8-1 运动方程为 x '= 40(1? cos t ) , y '= 40sin t 式中t 以 s 计,x '和 y '以 mm 计。平面Ox ' y '又绕垂直于该平面的轴O 转动,转动方程为 ?= t rad ,式中角?为动系的 x '轴与定系的 x 轴间的交角。求点 M 的相对轨迹和绝对轨迹。 解 由点 M 的相对运动方程可改写为 ? x ' ? ??? 40 ?1??? = ?cos t y ' = sin t 40 上2式两边平方后相加,得点 M 的相对轨迹方程 (x '?40)2 + y '2 =1600图 8-2由题得点 M 的坐标变换关系式
x = x 'cos ?? y 'sin ?y = x 'sin ?+ y 'cos ? 将?= t 和相对运动方程代入,消去t 得点M 的绝对轨迹方程 (x + 40)2 + y 2 =1600 8-3 水流在水轮机工作轮入口处的绝对速度v a =15 m/s ,并与直径成β= 60° 角,如图 8-3a 所示,工作轮的半径R = 2 m ,转速n = 30 r/min 。为避 免水流与工作轮叶片相冲击,叶片应恰当地安装,以使水流对工作轮的相对速度与叶片相切。求在工作轮外缘处水流对工作轮的相对速度的大小方向。 x ′ (a) (b) 图 8-3 解 水轮机工作轮入口处的 1 滴水为动点 M ,动系固结于工作轮,定系固结于机架/ 地面(一般定系可不别说明,默认为固结于机架,下同);牵连运动为定轴转动,相对运动与叶片曲面相切,速度分析如图 8-3b 所示,设θ为v r 与 x '轴的夹角。点 M 的牵连速度 n π v e = R ω= 2× = 6.283 m/s 30 方向与y ' 轴平行。由图 8-3b , ′ v